Изобретение относится к гироскопическим приборам, а именно к гидродинамическим гироскопам, и может быть использовано в системах управления реактивными снарядами систем залпового огня.
Известен гидродинамический гироскоп (см. Андрейченко К.П. Динамика поплавковых гироскопов и акселерометров. - М.: Машиностроение, 1987, с.7-8), принятый за аналог. Гироскоп содержит корпус, вращающийся от внешнего электродвигателя ротор со сферической полостью, частично заполненной жидкостью, сферический поплавок, в экваториальной плоскости которого установлен постоянный кольцевой магнит, и сигнальную катушку.
Задачей данного технического решения являлось повышение точностных характеристик гироскопа путем увеличения постоянной времени. Данная задача частично решена за счет выполнения постоянного магнита в виде кольца, установленного в экваториальной плоскости поплавка.
Недостатком данного гироскопа является то, что вследствие отклонения формы поплавка и полости от правильной сферы из-за технологических погрешностей изготовления возникают уводящие моменты  , вызывающие перекрестную связь, что в свою очередь приводит к уменьшению постоянной времени.
, вызывающие перекрестную связь, что в свою очередь приводит к уменьшению постоянной времени.
Общими признаками с предлагаемым авторами гидродинамическим гироскопом является наличие корпуса, вращающегося от внешнего электродвигателя ротора со сферической полостью, частично заполненной жидкостью, сферического поплавка с постоянным кольцевым магнитом, установленным в его экваториальной плоскости, и сигнальной катушки.
Указанного недостатка лишен гидродинамический гироскоп по патенту РФ №2116623, опубликованному 27.07.98. Он содержит корпус, вращающийся от внешнего электродвигателя ротор с регулируемой, частично заполненной жидкостью полостью, выполненный из левой и правой жестко соединенных между собой через регулируемый элемент чашек с внутренней сферической поверхностью, центы сфер которых смещены из центра ротора, размещенный в полости сферический поплавок.
Задачей данного технического решения являлось повышение точности за счет уменьшения перекрестной связи путем компенсации уводящих моментов от несферичности поплавка и полости моментом, возникающим при регулировании формы полости аксиальным смещением центров сфер чашек из центра ротора.
Недостатком данного гироскопа является замыкание магнитного потока постоянного кольцевого магнита через воздух, что приводит из-за его большого рассеивания к снижению напряжения в сигнальной катушке и, следовательно, к снижению коэффициента передачи Кп и тем самым к снижению точностных характеристик.
Общими признаками с предлагаемым авторами гидродинамическим гироскопом является наличие корпуса, вращающегося от внешнего электродвигателя ротора с регулируемой, частично заполненной жидкостью полостью, выполненного из левой и правой жестко соединенных между собой через регулируемый элемент чашек с внутренней сферической поверхностью, центры сфер которых смещены из центра полости ротора, размещенного в полости ротора сферического поплавка.
Указанного недостатка лишен гироскоп со сферическим ротором (см. патент США №3252340 от 24.05.66, кл. 74.5.46), являющийся наиболее близким по технической сути к изобретению и принятый за прототип.
Гироскоп содержит корпус, вращающийся ротор со сферической полостью, заполненной жидкостью, в которой размещен сферический поплавок с постоянным кольцевым магнитом, цилиндрический магнитопровод для замыкания магнитного потока постоянного кольцевого магнита, закрепленный в корпусе коаксиально с ротором, и электродвигатель.
Задачей данного гироскопа являлось повышение точности за счет повышения коэффициента передачи Кп путем уменьшения рассеивания магнитного потока Фм замыканием его через цилиндрический магнитопровод.
Недостатком прототипа является наличие уводящего момента  , где Fмт - сила радиального магнитного тяжения между цилиндрическим магнитопроводом и постоянным кольцевым магнитом, Rм -радиус постоянного кольцевого магнита, α - угол отклонения поплавка.
, где Fмт - сила радиального магнитного тяжения между цилиндрическим магнитопроводом и постоянным кольцевым магнитом, Rм -радиус постоянного кольцевого магнита, α - угол отклонения поплавка.
Момент  вызывает перекрестную связь
вызывает перекрестную связь  и снижение постоянной времени Т.
и снижение постоянной времени Т.
Другой недостаток прототипа состоит в том, что выполнение постоянного кольцевого магнита с размером в соответствии с известными рекомендациями (см. Постоянные магниты. Справочник. Под редакцией д.т.н. проф. Ю.Н. Пятина, М.: Энергия, 1971, с.152-157) не позволяет обеспечить увеличение осевого момента инерции кольцевого магнита при его минимальной массе, что необходимо для повышения постоянной времени Т гироскопа.
Скомпенсировать уводящий момент  путем перемещения центров сфер чашек на величину L не представляется возможным из-за ограничения условием L≤0,004 Rк, где Rк - радиус сферы чашек, позволяющего компенсировать только уводящий момент от несферичности поплавка и полости.
путем перемещения центров сфер чашек на величину L не представляется возможным из-за ограничения условием L≤0,004 Rк, где Rк - радиус сферы чашек, позволяющего компенсировать только уводящий момент от несферичности поплавка и полости.
Момент магнитного тяжения может быть снижен путем уменьшения величины магнитного потока Фм постоянного кольцевого магнита (см. Одинцов А.А. Проектирование электроэлементов гироскопических устройств. М.: Энергия, 1962, с.91-92). Но это приводит к уменьшению коэффициента передачи Кп=Кс·Т, где Кс - крутизна выходной характеристики, и для его увеличения необходимо увеличивать число витков сигнальной катушки, что усложняет конструкцию гироскопа.
Общими признаками с предлагаемым гидродинамическим гироскопом является наличие в прототипе корпуса, вращающегося ротора со сферической полостью, заполненной жидкостью, в которой помещен сферический поплавок с постоянным кольцевым магнитом, цилиндрического магнитопровода для замыкания магнитного потока и электродвигателя.
В отличие от прототипа, в предлагаемом авторами гидродинамическом гироскопе введено регулируемое корректирующее устройство в виде двух цилиндрических колец из магнитомягкого материала, установленных на краях внутренней поверхности цилиндрического магнитопровода коаксиально ротору с возможностью аксиального перемещения, а постоянный магнит выполнен в соответствии с соотношениями
 ,
,
где A, Н, Дм - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, Дп - диаметр поплавка.
Именно это позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков заявляемого технического решения и достигаемым техническим результатом.
Указанные признаки, отличительные от прототипа и на которые распространяется испрашиваемый объем правовой защиты, во всех случаях достаточны.
Задачей предлагаемого изобретения является повышение точности гидродинамического гироскопа. Повышение точности гироскопа обеспечивается за счет увеличения постоянной времени, коэффициента передачи и уменьшения перекрестной связи.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном гидродинамическом гироскопе, содержащем корпус, вращающийся ротор со сферической, заполненной жидкостью полостью, выполненный из двух чашек с внутренней сферической поверхностью, центры сфер которых смещены из центра полости ротора, в котором размещен сферический поплавок с постоянным кольцевым магнитом, цилиндрический магнитопровод для замыкания магнитного потока кольцевого магнита, особенность заключается в том, что введено корректирующее устройство в виде двух колец из магнитомягкого материала, установленных на внутренней поверхности цилиндрического магнитопровода коаксильно ротору с возможностью аксиального перемещения, а постоянный кольцевой магнит выполнен в соответствии с соотношениями
 ,
,
где A, H, Дм - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, Дп - диаметр поплавка.
Новая совокупность элементов, а также наличие связей между ними позволяют, в частности, за счет введения регулируемого корректирующего устройства, уменьшающего уводящий момент от магнитного тяжения между кольцевым постоянным магнитом и цилиндрическим магнитопроводом, и за счет выполнения кольцевого постоянного магнита в соответствии с представленными соотношениями высоты, толщины и наружного диаметра, максимально увеличивающего осевой момент инерции при его минимальной массе, повысить точность гироскопа.
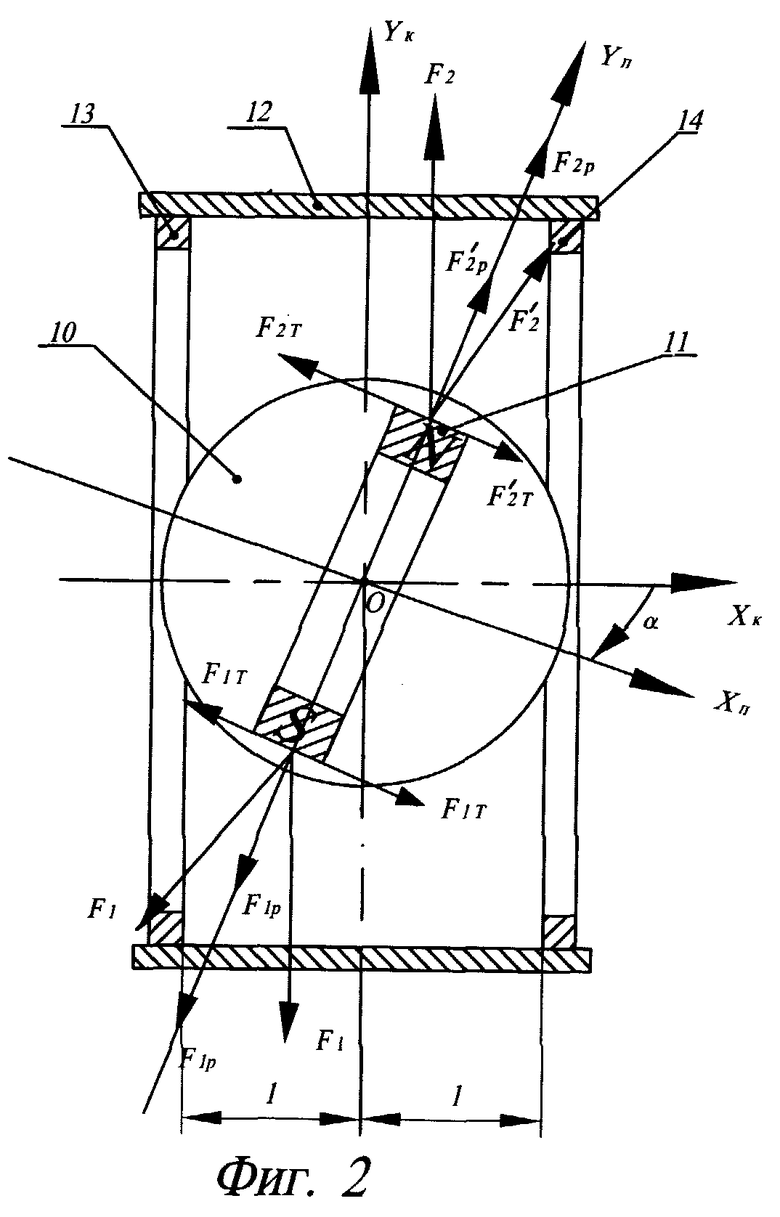
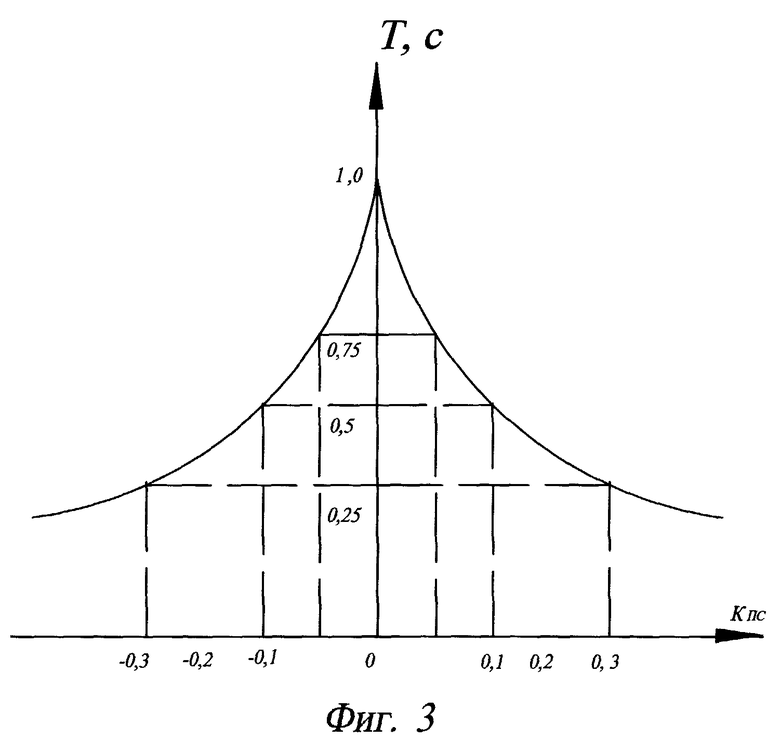
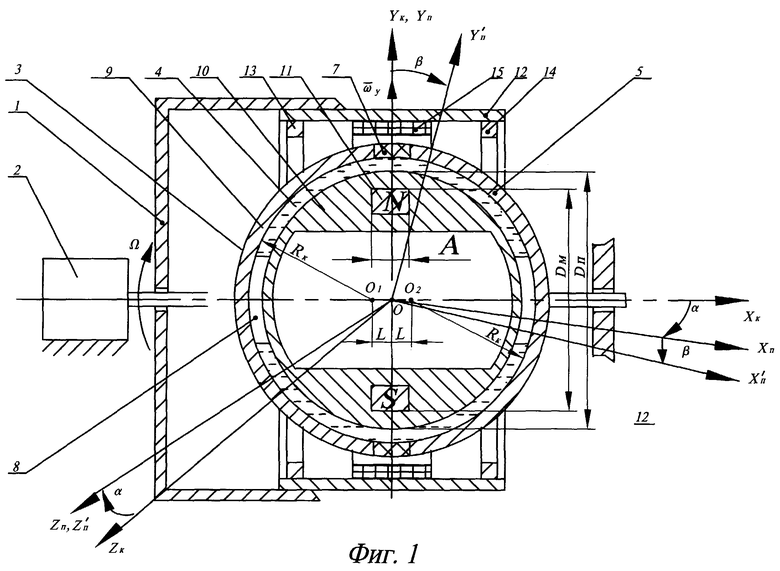
Сущность изобретения поясняется чертежом, где на фиг. 1 изображен гидродинамический гироскоп, на фиг. 2 приведена схема сил магнитного тяжения, действующих на поплавок, на фиг. 3 показана зависимость постоянной времени от коэффициента перекрестной связи Кпс.
Предлагаемый гидродинамический гироскоп содержит корпус 1, вращающийся от внешнего электродвигателя 2, ротор 3, выполненный из левой 4 и правой 5 чашек, жестко соединенных между собой через регулируемый элемент 6. Внутренняя поверхность чашек выполнена сферической, центры сфер левой 4 и правой 5 чашек O1 и O2 соответственно смещены из центра полости ротора P на величену L. Образованная полость 7 частично заполнена жидкостью 8, в ней размещен сферический поплавок 9 с установленным в его экваториальной плоскости постоянным кольцевым магнитом 10. В корпусе закреплен цилиндрический магнитопровод 11, на краях которого установлены цилиндрические кольца 12, 13 из магнитомягкого материала. Сигнальная катушка 14 установлена в зазоре между цилиндрическим магнитопроводом 11 и ротором 3.
Гироскоп работает следующим образом. При вращении ротора 3 с угловой скоростью Ω поплавок 9 за счет сил гидродинамического давления со стороны жидкости 8, увлекаемой во вращение внутренней поверхностью чашек 4, 5, размещается в центре О полости 7 ротора и за счет сил вязкого трения приводится во вращение с угловой скоростью Ω. Оси собственного вращения поплавка и ротора совпадают с осью OX. При угловом перемещении гироскопа, например, в плоскости ZOX с угловой скоростью ωвх на поплавок 9 действует гироскопический момент Мг=Н·ωвх, где Н - кинетический момент поплавка. Поплавок стремится сохранить свое положение в пространстве, и между осями собственного вращения ротора 3 и поплавка 9 появляется угол рассогласования α=Т·ωвх, где Т - постоянная времени гироскопа. При этом на поплавок 9 действует момент сил вязкого трения Мвт1=Квт·Ω·α, где Квт - коэффициент сил вязкого трения поплавка о жидкость. Мвт уравновешивает гироскопический момент Мг.
При наличии уводящего момента от несферичности  ось поплавка ОХп отклоняется на угол β1 в плоскости, перпендикулярной плоскости перемещения гироскопа с угловой скоростью ωвх. Момент
ось поплавка ОХп отклоняется на угол β1 в плоскости, перпендикулярной плоскости перемещения гироскопа с угловой скоростью ωвх. Момент  уравновешивается моментом сил вязкого трения Mвт2=Квт·Ω·β1.
уравновешивается моментом сил вязкого трения Mвт2=Квт·Ω·β1.
С помощью регулируемого элемента 6 добиваются минимально возможного значения углового отклонения β1=β2. При этом перекрестная связь снижается до величины Кпс=β2/α, а постоянная времени гироскопа Т увеличивается в соответствии с зависимостью T=f(Kпс), приведенной на фиг. 3.
Оставшееся нескомпенсированным угловое отклонение оси поплавка ОХп β2 обусловлено уводящим моментом от сил магнитного тяжения Fмт между постоянным кольцевым магнитом 10 и цилиндрическим магнитопроводом 11  =F1·Rм·α, где направление действия силы Fмт параллельно оси ОYк при отсутствии колец 12, 13 (фиг. 2).
=F1·Rм·α, где направление действия силы Fмт параллельно оси ОYк при отсутствии колец 12, 13 (фиг. 2).
Установкой в цилиндрический магнитопровод 11 и оксиальным перемещением цилиндрических колец 12, 13 на расстояние I от центра О кольцевого магнита 10 добиваются совмещения направления действия силы магнитного тяжения F
Выполнение гидродинамического гироскопа в соответствии с изобретением позволило повысить точность гироскопа за счет снижения перекрестной связи, увеличения постоянной времени, что позволяет улучшить точностные характеристики систем управления и стабилизации реактивных снарядов систем залпового огня.
Указанный положительный эффект подтвержден испытаниями опытных образцов, выполненных в соответствии с изобретением.
В настоящее время разработана конструкторская документация, намечено серийное производство.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2310163C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2410645C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 1995 |
|
RU2116623C1 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2009 |
|
RU2401975C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ОТКЛОНЕНИЯ ЗАДАННОГО НАПРАВЛЕНИЯ ОТ ВЕРТИКАЛИ И ПОПЕРЕЧНЫХ УСКОРЕНИЙ ПОСРЕДСТВОМ ГИДРОДИНАМИЧЕСКИХ ГИРОСКОПОВ, СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА С АКСИАЛЬНЫМ СМЕЩЕНИЕМ ЦЕНТРА МАСС И СПОСОБ ОПРЕДЕЛЕНИЯ ЕГО ПЛАВУЧЕСТИ | 2004 |
|
RU2269097C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2270417C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2433375C2 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2267746C1 |
| СПОСОБ НАСТРОЙКИ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА, СПОСОБ НАСТРОЙКИ ЦЕНТРИРУЮЩЕЙ ЧАСТИ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА, СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАВУЧЕСТИ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА, СПОСОБ КОРРЕКТИРОВКИ КОЛИЧЕСТВА ЖИДКОСТИ В ПОДВЕСЕ ПОПЛАВКА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА И УСТРОЙСТВО НАСТРОЙКИ ЦЕНТРИРУЮЩЕЙ ЧАСТИ ПОДВЕСА (ВАРИАНТЫ) | 2004 |
|
RU2269096C2 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2217700C1 |
Изобретение относится к области военной техники, а именно к измерительным элементам систем управления и стабилизации реактивных снарядов, например реактивных снарядов систем залпового огня. Сущность изобретения: в гидродинамический гироскоп, содержащий корпус, ротор с регулируемой, частично заполненной жидкостью полостью, выполненный из левой и правой жестко соединенных между собой через регулируемый элемент чашек с внутренней сферической поверхностью, центры сфер которых смещены из центра полости ротора, размещенный в полости ротора сферический поплавок с постоянным кольцевым магнитом, цилиндрический магнитопровод, сигнальную катушку и электродвигатель, введено регулируемое корректирующее устройство в виде двух цилиндрических колец из магнитомягкого материала, установленных на краях внутренней поверхности цилиндрического магнитопровода коаксиально ротору с возможностью аксиального перемещения, а постоянный кольцевой магнит выполнен в соответствии с соотношениями  =0,095-0,105;
=0,095-0,105;  =0,075-0,085;
=0,075-0,085;  =0,90-0,92, где А, Н, Дм - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, Дп - диаметр поплавка. Техническим результатом является повышение точностных характеристик гироскопа путем увеличения коэффициента передачи и постоянной времени. 3 ил.
=0,90-0,92, где А, Н, Дм - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, Дп - диаметр поплавка. Техническим результатом является повышение точностных характеристик гироскопа путем увеличения коэффициента передачи и постоянной времени. 3 ил.
Гидродинамический гироскоп, содержащий корпус, ротор с регулируемой, частично заполненной жидкостью полостью, выполненной из левой и правой жестко соединенных между собой через регулируемый элемент чашек с внутренней сферической поверхностью, центры сфер которых смещены из центра полости ротора, размещенный в полости ротора сферический поплавок с постоянным кольцевым магнитом, установленным в экваториальной плоскости поплавка, цилиндрический магнитопровод, сигнальную катушку, размещенную в зазоре между цилиндрическим магнитопроводом и ротором, и электродвигатель, отличающийся тем, что он снабжен регулируемым корректирующим устройством в виде двух цилиндрических колец из магнитомягкого материала, установленных на внутренней поверхности цилиндрического магнитопровода коаксиально ротору с возможностью аксиального перемещения, а постоянный кольцевой магнит выполнен в соответствии с соотношениями:
 =0,095-0,105;
=0,095-0,105;
 =0,075-0,085;
=0,075-0,085;
 =0,90-0,92,
=0,90-0,92,
где А, Н, Дм - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита;
Дп - диаметр поплавка.
| US 3252340 А, 24.05.1966 | |||
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 1995 |
|
RU2116623C1 |
| АНДРЕЙЧЕНКО К.П | |||
| Динамика поплавковых гироскопов и акселерометров | |||
| - М.: Машиностроение, 1987, с.7 и 8 | |||
| US 4570507 А, 18.02.1986 | |||
| GB 1410580 А, 22.10.1975. | |||

