Изобретение относится к гироскопическим приборам, а именно к гидродинамическим гироскопам, и может быть использовано в системах управления реактивными снарядами, преимущественно реактивными снарядами систем залпового огня.
Известен гидродинамический гироскоп (см. например, И.А.Горенштейн. Гидродинамические гироскопы. - М.: Машиностроение, 1972, с.104-105), содержащий корпус, вращающийся ротор со сферической полостью, заполненной жидкостью, размещенный в ней сферический поплавок с запресованным в него постоянным стержневым магнитом, сигнальную обмотку.
Задачей данного технического решения являлось получение электрического сигнала, пропорционального угловой скорости поворота корпуса гироскопа. Данная задача решена за счет того, что вращающийся сферический поплавок в сферической камере, заполненной жидкостью, сохраняет свое положение в пространстве и при повороте корпуса гироскопа с некоторой угловой скоростью между осью вращения поплавка и продольной осью корпуса образуется угол рассогласования, пропорциональный угловой скорости поворота корпуса.
Недостатком этого гироскопа является то, что невозможно установить внутри поплавка по оси его вращения полую цилиндрическую втулку для размещения в ней устройства осевого центрирования поплавка. Кроме того, стержневой магнит не обеспечивает синусоидальной формы напряжения, наводимого в сигнальной обмотке.
Общими признаками с предлагаемым авторами гидродинамическим гироскопом является наличие корпуса, вращающегося ротора со сферической полостью, заполненной жидкостью, размещенного в ней сферического поплавка с установленным в нем постоянным магнитом, сигнальной обмотки.
Указанного недостатка лишен гидродинамический гироскоп (см., например, К.П.Андрейченко. Динамика поплавковых гироскопов и акселерометров. - М.: Машиностроение, 1987, с.7-8, с.93), принятый за аналог. Гироскоп содержит корпус, вращающийся от внешнего электродвигателя ротор со сферической полостью, частично заполненной жидкостью, сферический поплавок, в экваториальной плоскости которого установлен постоянный кольцевой магнит, и сигнальную обмотку.
Задачей данного технического решения являлось повышение точностных характеристик гироскопа путем повышения постоянной времени Т и коэффициента передачи КП. Данная задача частично решена за счет выполнения постоянного магнита в виде кольца, установленного в экваториальной плоскости поплавка, частичного заполнения сферической полости жидкостью с выполнением условия равенства массы поплавка массе вытесненной им жидкости.
Данный гироскоп обладает следующими недостатками.
Вследствие отклонения формы поплавка и сферической полости от правильной сферы из-за технологических погрешностей изготовления возникают уводящие моменты  вызывающие перекрестную связь, что в свою очередь приводит к уменьшению постоянной времени.
вызывающие перекрестную связь, что в свою очередь приводит к уменьшению постоянной времени.
Замыкание магнитного потока постоянного кольцевого магнита осуществляется через воздух, что приводит из-за его большого рассеивания к снижению напряжения в сигнальной обмотке и, следовательно, к снижению коэффициента передачи КП и тем самым к снижению точности гироскопа.
Кроме того, для повышения коэффициента передачи КП и постоянной времени Т гироскопа поплавок должен иметь максимально возможный осевой момент инерции при ограничении его массы величиной массы вытесненной им жидкости.
У известных жидкостей, используемых в поплавковых гироскопах, например фторорганических, плотность может быть равна 2...2,4 г/см3 (см., например, Д.С.Пельпор и др. Гироскопические приборы систем ориентации и стабилизации. - М.: Машиностроение, 1977, с.51-52). Сферический поплавок обычно выполняют полым из легких немагнитных сплавов. Для обеспечения необходимой жесткости поплавка и сохранения стабильности его формы его стенки должны иметь толщину не менее 1,5...2 мм. При этом масса оболочки может составлять до 65% общей массы поплавка, а масса кольцевого магнита до 35% массы поплавка при максимально возможном осевом моменте инерции.
Выполнение постоянного кольцевого магнита с размерами в соответствии с известными рекомендациями (см. Постоянные магниты. Справочник. Под редакцией д.т.н., проф. Ю.Н.Пятина. - М.: Энергия, 1971, с.152-157) не позволяет обеспечить увеличение осевого момента инерции кольцевого магнита при его минимальной массе, что необходимо для повышения постоянной времени гироскопа, при допустимом соотношении массы магнита и массы поплавка. Так, при изготовлении кольцевого магнита из известных сплавов, например ЮНКД-24, вследствие его хрупкости минимальная толщина магнита δ должна выбираться из соотношения  , где DM - наружный диаметр магнита. При этом масса магнита будет составлять не менее 50% общей массы поплавка, что не допускается по конструктивным соображениям. Уменьшение же массы магнита до требуемой приводит к снижению магнитной индукции и, как следствие, к снижению выходного напряжения в сигнальной обмотке Uc=f(Φ, α), где Ф - магнитный поток, α - угол рассогласования между осью вращения поплавка и ротора гироскопа.
, где DM - наружный диаметр магнита. При этом масса магнита будет составлять не менее 50% общей массы поплавка, что не допускается по конструктивным соображениям. Уменьшение же массы магнита до требуемой приводит к снижению магнитной индукции и, как следствие, к снижению выходного напряжения в сигнальной обмотке Uc=f(Φ, α), где Ф - магнитный поток, α - угол рассогласования между осью вращения поплавка и ротора гироскопа.
Общими признаками с предлагаемым авторами гидродинамическим гироскопом является наличие корпуса, вращающегося от внешнего электродвигателя ротора со сферической полостью, частично заполненной жидкостью, размещенного в ней сферического поплавка с постоянным кольцевым магнитом, установленным в его экваториальной плоскости, и сигнальной обмотки.
Указанных недостатков лишен гидродинамический гироскоп (см. патент РФ №2230293), являющийся наиболее близким по технической сути к изобретению и принятый за прототип.
Гидродинамический гироскоп содержит корпус, ротор с регулируемой, частично заполненной жидкостью полостью, выполненной из левой и правой жестко соединенных между собой через регулируемый элемент чашек с внутренней сферической поверхностью, центры сфер которых смещены из центра полости ротора, размещенный в полости ротора сферический поплавок с постоянным кольцевым магнитом, установленным в экваториальной плоскости поплавка, цилиндрический магнитопровод, регулируемое корректирующее устройство в виде двух цилиндрических колец из магнитомягкого материала, установленных на внутренней поверхности цилиндрического магнитопровода коаксиально ротору с возможностью аксиального перемещения, сигнальную обмотку, размещенную в зазоре между цилиндрическим магнитопроводом и ротором, электродвигатель, а постоянный кольцевой магнит выполнен в соответствии с соотношением  ;
;  ;
;  , где h, δ, DМ - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, DП - диаметр поплавка.
, где h, δ, DМ - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, DП - диаметр поплавка.
Задачей данного технического решения являлось повышение точности за счет повышения коэффициента передачи, постоянной времени, путем снижения величины перекрестной связи гидродинамического гироскопа.
Данная задача решена введением регулируемой в аксиальном направлении камеры, обеспечивающей компенсацию уводящих моментов от несферичности поплавка и камеры, введением регулируемого корректирующего устройства в виде 2-х колец из магнитомягкого материала, установленных на внутренней поверхности цилиндрического магнитопровода коаксиально ротору с возможностью аксиального перемещения, и выполнением кольцевого постоянного магнита в соответствии с соотношениями:
 ;
;  ;
; 
где h, δ, DМ - соответственно высота, толщина и наружный диаметр магнита, DП - диаметр сферического поплавка.
Недостатком прототипа является следующее.
При проектировании гироскопа для повышения крутизны выходной характеристики обмотку съема сигнала обычно стараются выполнить с наибольшей шириной H по длине магнитного зазора, увеличивая число витков. Однако в известном устройстве крутизна характеристики возрастает не пропорционально длине и ширине обмотки из-за большого рабочего зазора Q между магнитом и магнитопроводом и малым отношением  , где распределение магнитной индукции неравномерно, что показано на графике фиг.2. Это приводит к увеличению расхода обмоточного провода и увеличению внутреннего сопротивления обмотки.
, где распределение магнитной индукции неравномерно, что показано на графике фиг.2. Это приводит к увеличению расхода обмоточного провода и увеличению внутреннего сопротивления обмотки.
Кроме того, изготовление сигнальной обмотки, например с помощью шаблона, перевязывание нитками после снятия с шаблона и установка внутри магнитопровода гироскопа может привести к их геометрическому искажению. Конец последнего витка может под каким угодно углом пересекать основные витки обмотки, что приводит к появлению дополнительного нулевого сигнала  (шума) при отсутствии воздействия на гироскоп входной измеряемой угловой скорости, что снижает точность гироскопа.
(шума) при отсутствии воздействия на гироскоп входной измеряемой угловой скорости, что снижает точность гироскопа.
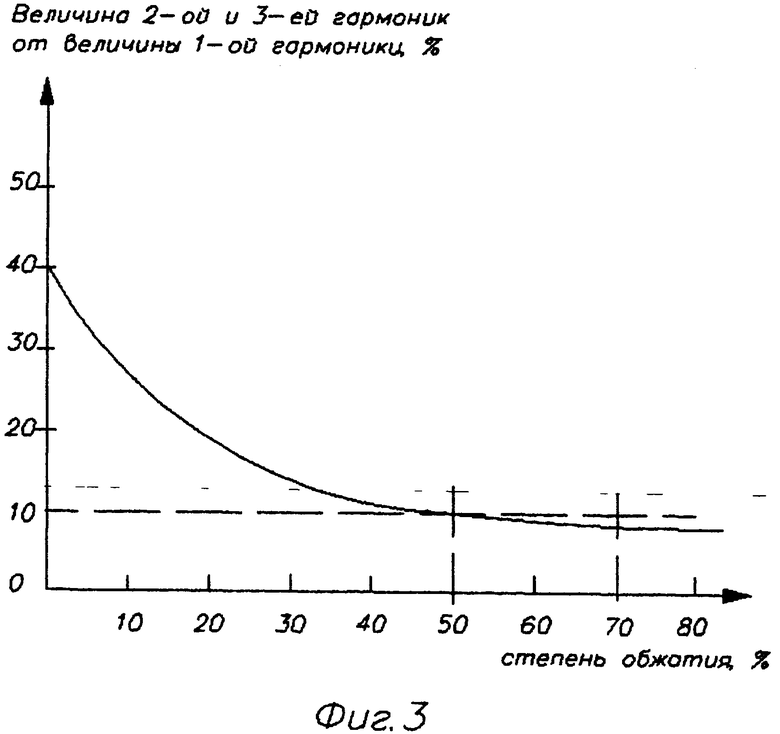
Другим недостатком прототипа является то, что вследствие неоднородности структуры литейных сплавов, например ЮНДК-24, кривая распределения магнитной индукции по окружности магнита имеет значительную величину 2-й и 3-й гармоники, отношение которых к величине 1-й гармоники составляет до (30...40)%, что приводит к значительному искажению синусоидальной формы напряжения в сигнальной обмотке и, как следствие, к фазовым сдвигам при дальнейшей обработке сигнала с кольцевой сигнальной обмотки в усилительно-преобразовательном тракте системы управления, что снижает точность измерения гидродинамическим гироскопом угловых перемещений объекта, например реактивных снарядов.
Общими признаками с предлагаемым гидродинамическим гироскопом является наличие в прототипе корпуса, ротора с регулируемой, частично заполненной жидкостью полостью, выполненного из левой и правой жестко соединенных между собой через регулируемый элемент чашек с внутренней сферической поверхностью, центры сфер которых смещены из центра полости ротора, размещенный в полости ротора сферический поплавок с установленным в экваториальной плоскости поплавка постоянным кольцевым магнитом, выполненным в соответствии с соотношениями:
; ;
где h, δ, DМ - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, DП - диаметр поплавка, цилиндрического магнитопровода, регулируемого корректирующего устройства в виде двух цилиндрических колец из магнитомягкого материала, установленных на внутренней поверхности цилиндрического магнитопровода коаксиально ротору с возможностью аксиального перемещения, сигнальной обмотки, размещенной в зазоре между магнитопроводом и ротором, электродвигателя.
В отличие от прототипа в предлагаемом авторами гидродинамическом гироскопе введен полый каркас из электроизоляционного материала с кольцевой проточкой на наружной стороне, установленный внутри цилиндрического магнитопровода с расположением кольцевой проточки симметрично экваториальной плоскости поплавка, кольцевая сигнальная обмотка уложена в кольцевой проточке каркаса в виде многорядовой обмотки с четным количеством рядов с укладкой провода вплотную виток к витку. Ширина кольцевой проточки определяется из соотношения  , где Q - расстояние между поверхностями магнитопровода и кольцевого постоянного магнита, h - высота кольцевого постоянного магнита, а кольцевой постоянный магнит выполнен из магнитотвердого сплава на основе Fe-Cr-Co, содержащего (23,5-28,5)% Cr, (11-13)% Со, (0,8-1,0)% Al, (0,5-1,0)% Ni, (0,7-1,0)% V, остальное Fe, подвергнутого пластической деформации со степенью обжатия (50-70)%.
, где Q - расстояние между поверхностями магнитопровода и кольцевого постоянного магнита, h - высота кольцевого постоянного магнита, а кольцевой постоянный магнит выполнен из магнитотвердого сплава на основе Fe-Cr-Co, содержащего (23,5-28,5)% Cr, (11-13)% Со, (0,8-1,0)% Al, (0,5-1,0)% Ni, (0,7-1,0)% V, остальное Fe, подвергнутого пластической деформации со степенью обжатия (50-70)%.
Именно это позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков заявляемого технического решения и достигаемым техническим результатом.
Указанные признаки, отличительные от прототипа, и на которые распространяется испрашиваемый объем правовой защиты, во всех случаях достаточны.
Задачей предлагаемого изобретения является повышение точности гидродинамического гироскопа. Повышение точности гироскопа обеспечивается за счет увеличения коэффициента передачи, уменьшения величины 2-й и 3-й гармоник синусоидального напряжения в сигнальной обмотке, уменьшения величины нулевого сигнала.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном гидродинамическом гироскопе, содержащем корпус, ротор с регулируемой, частично заполненной жидкостью полостью, выполненной из левой и правой жестко соединенных между собой через регулируемый элемент чашек, центры сфер, которых смещены из центра полости ротора, размещенный в полости ротора сферический поплавок с установленным в его экваториальной плоскости постоянным кольцевым магнитом, выполненным в соответствии с соотношением ; ; где h, δ, DМ - соответственно высота, толщина и наружный диаметр кольцевого магнита, DП - диаметр поплавка, цилиндрический магнитопровод, регулируемое корректирующее устройство в виде двух цилиндрических колец из магнитомягкого материала, установленных на внутренней поверхности цилиндрического магнитопровода коаксиально ротору с возможностью аксиального перемещения, сигнальную обмотку, размещенную в зазоре между цилиндрическим магнитопроводом и ротором, электродвигатель, дополнительно введен полый цилиндрический каркас из электроизоляционного материала с кольцевой проточкой на наружной поверхности, установленный внутри цилиндрического магнитопровода. Кольцевая проточка располагается симметрично относительно экваториальной плоскости поплавка и выполнена шириной, определяемой из соотношения  , где Q - расстояние между поверхностями магнитопровода и кольцевого постоянного магнита, h - высота кольцевого магнита. Кольцевая сигнальная обмотка уложена в кольцевой проточке каркаса в виде многорядовой обмотки с укладкой провода вплотную виток к витку с четным количеством рядов. Кольцевой постоянный магнит выполнен из магнитотвердого сплава на основе Fe-Cr-Co, содержащего (23,5-28,5)% Cr, (11-13)% Со, (0,8-1,0)% Al, (0,5-1,0)% Ni, (0,7-1,0)% V остальное Fe, подвергнутого пластической деформации со степенью обжатия (50-70)%.
, где Q - расстояние между поверхностями магнитопровода и кольцевого постоянного магнита, h - высота кольцевого магнита. Кольцевая сигнальная обмотка уложена в кольцевой проточке каркаса в виде многорядовой обмотки с укладкой провода вплотную виток к витку с четным количеством рядов. Кольцевой постоянный магнит выполнен из магнитотвердого сплава на основе Fe-Cr-Co, содержащего (23,5-28,5)% Cr, (11-13)% Со, (0,8-1,0)% Al, (0,5-1,0)% Ni, (0,7-1,0)% V остальное Fe, подвергнутого пластической деформации со степенью обжатия (50-70)%.
Новая совокупность элементов, а также наличие связей между ними, позволяет, в частности:
- за счет введения цилиндрического полого каркаса из электоизоляционного материала с кольцевой проточкой по наружной поверхности и укладки кольцевой сигнальной обмотки в проточке виток к витку с четным количеством витков уменьшить нулевой сигнал гироскопа, а выполнение проточки шириной повысить крутизну характеристики S, уменьшить внутреннее сопротивление обмотки, что улучшает условия согласования с входом блока системы управления, преобразующего выходной сигнал гироскопа, и уменьшить количество обмоточного провода;
- за счет выполнения постоянного кольцевого магнита из магнитотвердого сплава на основе Fe-Cr-Co, подвергнутого пластической деформации со степенью обжатия (50-70)% (см. график Фиг.3) уменьшить в 3-4 раза величину 2-й и 3-й гармоник в синусоидальном выходном напряжении в сигнальной обмотке, обеспечить точность выполнения размеров кольцевого магнита и возможность его обработки методом точения.
Это повышает точность гироскопа и технологичность его изготовления.
Сущность изобретения поясняется чертежами, где на фиг.1 изображен гидродинамический гироскоп, на фиг.2 приведена схема распределения магнитной индукции В в зазоре между магнитопроводом и постоянным кольцевым магнитом, на фиг.3 показана зависимость 2-й и 3-й гармоник в синусоидальном выходном напряжении с сигнальной кольцевой обмотки в зависимости от степени обжатия сплава на основе Fe-Cr-Co постоянного кольцевого магнита.
Предлагаемый гидродинамический гироскоп содержит корпус 1, вращающийся от внешнего электродвигателя 2, ротор 3, выполненный из левой 4 и правой 5 чашек, жестко соединенных между собой через регулируемый элемент 6. Внутренняя поверхность чашек выполнена сферической, центры сфер левой 4 и правой 5 чашек O1 и О2 соответственно смещены из центра полости О. Образованная полость 7 частично заполнена жидкостью 8, в ней размещен сферический поплавок 9 с установленным в его экваториальной плоскости постоянным кольцевым магнитом 10. В корпусе 1 закреплен цилиндрический магнитопровод 11, на краях которого установлены цилиндрические кольца 12, 13 из магнитомягкого материала. В цилиндрическом магнитопроводе 11 установлен полый цилиндрический каркас 14 с кольцевой проточкой 15, в котором размещена кольцевая сигнальная обмотка 16, уложенная рядами виток к витку с четным количеством рядов.
Гироскоп работает следующим образом.
Система координат XYZ связана с ротором 3, система X1Y1Z1 - с поплавком 9. При вращении ротора 3 с угловой скоростью Ω поплавок 9 за счет сил гидродинамического давления со стороны жидкости 8, увлекаемой во вращение внутренней поверхностью чашек 4 и 5, размещается в центре О полости 7 ротора и за счет сил вязкого трения приводится во вращение с угловой скоростью Ω. Оси собственного вращения поплавка 9 и ротора 3 совпадают с осью ОХ. Магнитный поток Ф постоянного кольцевого магнита 10, проходя через воздушный зазор Q, замыкается через магнитопровод 11. Магнитный поток Ф при этом скользит вдоль плоскости витков кольцевой сигнальной катушки 16, не пересекая их. Напряжение Uc на выходе обмотки при этом равно нулю.
При угловом перемещении гироскопа, например в плоскости ZOX с угловой скоростью ωВХ на поплавок 9 действует гироскопический момент МГ=Н·ωВХ, где Н - кинитический момент поплавка. Поплавок стремится сохранить свое положение в пространстве, и между осями собственного вращения ротора 3 и поплавка 9 появляется угол рассогласования α=Т·ωВХ, где Т - постоянная времени гироскопа.
При этом на поплавок 9 действует момент сил вязкого трения МВТ=кВТ· Ω·α, где кВТ - коэффициент сил вязкого трения поплавка о жидкость. Момент МВТ уравновешивает гироскопический момент МГ.
При наличие уводящего момента  от несферичности поплавка и камеры путем перемещения чашек 4 и 5 вдоль оси ОХ посредством регулируемого элемента 6 уводящий момент
от несферичности поплавка и камеры путем перемещения чашек 4 и 5 вдоль оси ОХ посредством регулируемого элемента 6 уводящий момент  сводится к нулю.
сводится к нулю.
Уводящий момент  от сил магнитного тяжения между постоянным кольцевым магнитом 10 и магнитопроводом 11 компенсируется путем аксиального перемещения цилиндрических колец 12, 13 внутри магнитопровода 11.
от сил магнитного тяжения между постоянным кольцевым магнитом 10 и магнитопроводом 11 компенсируется путем аксиального перемещения цилиндрических колец 12, 13 внутри магнитопровода 11.
При возникновении угла рассогласования а между осями вращения поплавка 9 и ротора 3 магнитный поток Ф пересекает витки сигнальной обмотки 16 под углом α, при этом на выходе сигнальной обмотки появляется напряжение  ,
,
где  - значение магнитной индукции в середине воздушного зазора между кольцевым магнитом 9 и магнитопроводом 11,
- значение магнитной индукции в середине воздушного зазора между кольцевым магнитом 9 и магнитопроводом 11,
S - площадь внешней поверхности кольцевого магнита 10,
N - число витков в кольцевой сигнальной обмотке 16,
Ω - угловая скорость собственного вращения поплавка 9.
За счет выполнения постоянного кольцевого магнита 10 из сплава на основе Fe-Cr-Co, подвергнутого пластической деформации со степенью обжатия (50-70)% в синусоидальном сигнале Uс на выходе кольцевой сигнальной обмотки 16 величина 2-й и 3-й гармоник не превышает (5-10)% (см. график зависимости на фиг.3).
Выполнение гидродинамического гироскопа в соответствии с изобретением позволило повысить точность гироскопа за счет уменьшения нулевого сигнала, снижения величин 2-й и 3-й гармоник в выходном синусоидальном сигнале, что позволяет улучшить точностные характеристики систем управления и стабилизации реактивных снарядов, в частности, снарядов реактивных систем залпового огня.
Указанный положительный эффект подтвержден испытаниями опытных образцов, выполненных в соответствии с изобретением.
В настоящее время разработана конструкторская документация, намечено серийное производство.
Изобретение относится к области военной техники, а именно к измерительным элементам систем управления и стабилизации реактивных снарядов. Гироскоп содержит корпус, ротор со сферической регулируемой полостью, частично заполненной жидкостью, размещенный в ней сферический поплавок с постоянным кольцевым магнитом, цилиндрический магнитопровод, регулируемое магнитное устройство, сигнальную катушку, электродвигатель и полый цилиндрический каркас из электроизоляционного материала с кольцевой проточкой по наружной стороне, установленный внутри цилиндрического магнитопровода с расположением кольцевой проточки симметрично экваториальной плоскости поплавка. Кольцевая сигнальная обмотка уложена в кольцевой проточке каркаса в виде многорядовой обмотки с четным количеством рядов с укладкой провода вплотную виток к витку. Постоянный кольцевой магнит выполнен из магнитотвердого сплава на основе Fe-Cr-Co. Техническим результатом является повышение точностных характеристик гироскопа путем увеличения коэффициента передачи снижения нулевого сигнала. 3 ил.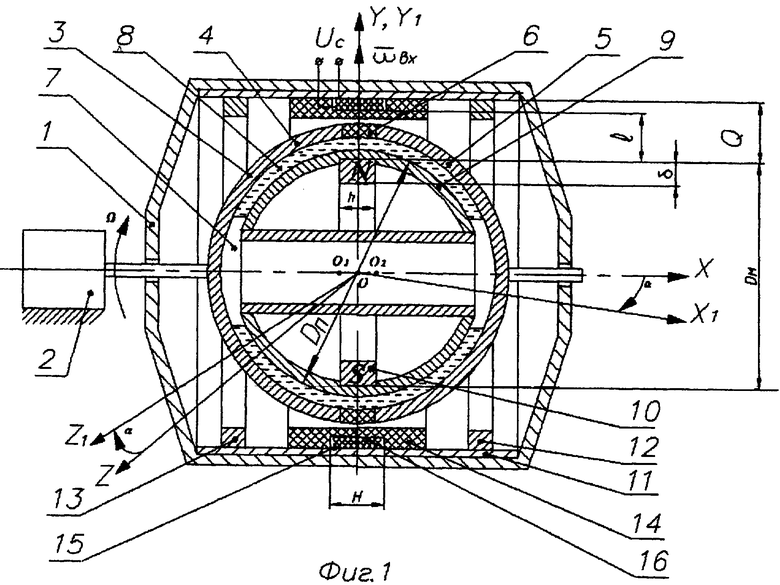
Гидродинамический гироскоп, содержащий корпус, ротор с регулируемой, частично заполненной жидкостью полостью, выполненной из левой и правой жестко соединенных между собой через регулируемый элемент чашек с внутренней сферической поверхностью, центры сфер которых смещены из центра полости ротора, размещенный в полости ротора сферический поплавок, цилиндрический магнитопровод, регулируемое корректирующее устройство в виде двух цилиндрических колец из магнитомягкого материала, установленных на внутренней поверхности цилиндрического магнитопровода коаксиального ротора с возможностью аксиального перемещения, сигнальную кольцевую обмотку, размещенную в зазоре между цилиндрическим магнитопроводом и ротором, электродвигатель, постоянный кольцевой магнит, установленный в экваториальной плоскости поплавка и выполненный в соответствии с соотношениями


где h, δ, Dм - соответственно высота, толщина и наружный диаметр постоянного кольцевого магнита, DП - диаметр поплавка, отличающийся тем, что он снабжен полым цилиндрическим каркасом из электроизоляционного материала с кольцевой проточкой на наружной поверхности, установленным внутри цилиндрического магнитопровода с расположением кольцевой проточки симметрично относительно экваториальной плоскости поплавка, кольцевая сигнальная обмотка уложена в кольцевой проточке каркаса в виде многорядовой обмотки с укладкой провода вплотную виток к витку с четным количеством рядов, ширина кольцевой проточки определяется из соотношения
 где Q - расстояние между поверхностями магнитопровода и кольцевого постоянного магнита, h - высота кольцевого магнита, а кольцевой постоянный магнит выполнен из магнитотвердого сплава на основе Fe-Cr-Co, содержащего (23,5-28,5)% Cr, (11-13)% Co, (0,8-1,0)% Al, (0,5-1,0)% Ni, (0,7-1,0)% V, остальное Fe, подвергнутого пластической деформации со степенью обжатия (50-70)%.
где Q - расстояние между поверхностями магнитопровода и кольцевого постоянного магнита, h - высота кольцевого магнита, а кольцевой постоянный магнит выполнен из магнитотвердого сплава на основе Fe-Cr-Co, содержащего (23,5-28,5)% Cr, (11-13)% Co, (0,8-1,0)% Al, (0,5-1,0)% Ni, (0,7-1,0)% V, остальное Fe, подвергнутого пластической деформации со степенью обжатия (50-70)%.
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2230293C1 |
| АНДРЕЙЧЕНКО К.П | |||
| ДИНАМИКА ПОПЛАВКОВЫХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ | |||
| - М.: Машиностроение, 1987, с.7-8 | |||
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 1995 |
|
RU2116623C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2217700C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2270417C1 |
| МАГНИТОГИДРОДИНАМИЧЕСКИЙ СПОСОБ ПРЕОБРАЗОВАНИЯ ТЕПЛОВОЙ ЭНЕРГИИ В ЭЛЕКТРИЧЕСКУЮ ЗАМКНУТОГО ЦИКЛА | 2002 |
|
RU2226737C2 |
| ПРЕОБРАЗОВАТЕЛЬ ВЛАЖНОСТИ ГАЗОВ | 1987 |
|
SU1492919A1 |

