Изобретение относится к области военной техники, а именно к системам управления вращающимися ракетами, и может быть использовано, например, для угловой стабилизации реактивных снарядов систем залпового огня.
Известно устройство угловой стабилизации вращающейся ракеты по патенту РФ №2126129, F42B 10/00, 15/01, опубл. 10.02.99 г., бюл. №4, которое содержит датчик угловых отклонений с чувствительным элементом, оснащенным постоянным магнитом и связанным с электроприводом, сигнальную и опорную обмотки, блок преобразования сигналов, исполнительный орган.
Такое устройство позволяет осуществить стабилизацию углового положения продольной оси реактивного снаряда.
Однако из-за существующих в датчике перекрестных связей, возникающих из-за связи чувствительного элемента с постоянным магнитом с приводом и конечного быстродействия исполнительного органа, в системе существуют динамические ошибки, приводящие к возникновению спиральных движений в переходных процессах, и, как следствие, система имеет конечную ошибку сигнала рассогласования, что ограничивает повышение точности стабилизации снаряда.
Задачей данного технического решения являлось повышение точности стабилизации за счет снижения инструментальных ошибок преобразования сигнала датчика угловых отклонений.
Общим признаком с предлагаемой авторами системой угловой стабилизации вращающегося реактивного снаряда является наличие в устройстве-аналоге датчика угловых отклонений с чувствительным элементом, оснащенным постоянным магнитом и связанным с электроприводом, сигнальной и опорной обмотками, блока преобразования сигналов, исполнительного органа.
Наиболее близкой по технической сути и достигаемому техническому результату является система угловой стабилизации реактивного снаряда по патенту РФ №2181875, F42B 10/00, 15/01, опубл. 27.04.2002, бюл. №12, принятая авторами за прототип, содержащая датчик угловых отклонений с чувствительным элементом, выполненным в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенным в сферической камере, заполненной жидкостью и механически связанной с приводом, сигнальной и двумя опорными обмотками, блок преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход - с газодинамическим исполнительным органом.
К недостаткам прототипа необходимо отнести следующее.
При угловом отклонении снаряда, например, с угловой скоростью ωвх между осью вращения поплавка с постоянным кольцевым магнитом и сферической камеры возникает угол рассогласования α=Т·ωвх, где Т - постоянная времени, при этом в сигнальной обмотке наводится напряжение Uc=Uc α+Uc n, где Uc α - напряжение, пропорциональное углу α, a Uc n обусловлено собственными колебаниями поплавка в слое жидкости, что снижает точность измерения углового отклонения снаряда. Для исключения этого явления необходимо обеспечить демпфирование колебаний поплавка.
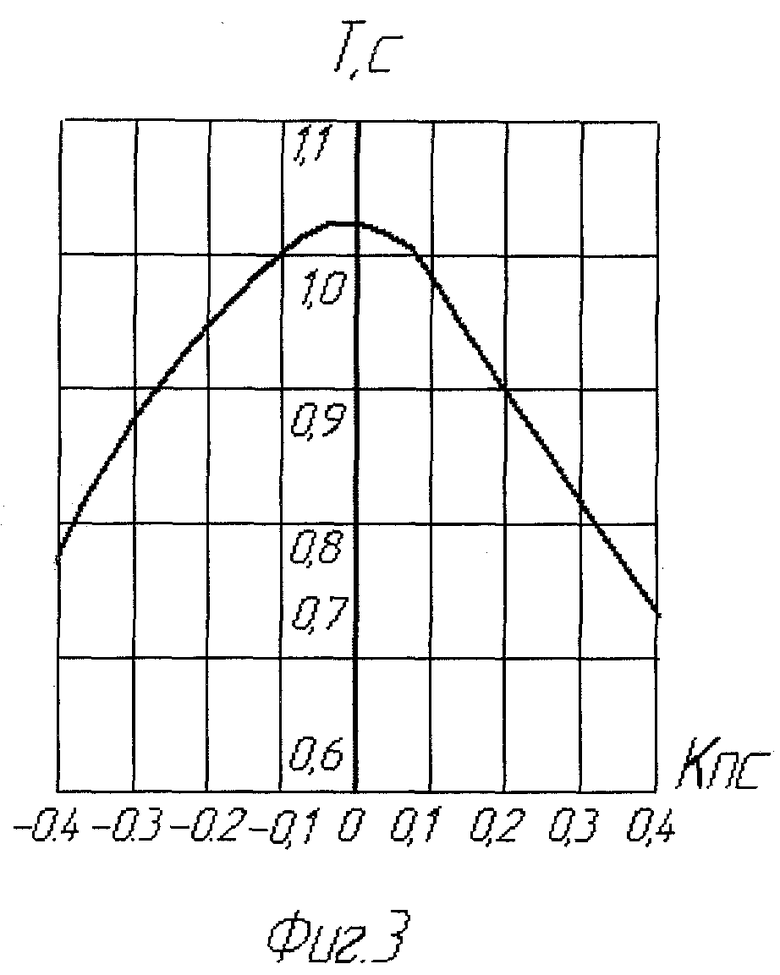
При отклонении оси вращения поплавка на угол α из-за магнитного тяжения между постоянным кольцевым магнитом и цилиндрическим магнитопроводом, которым снабжен датчик угловых отклонений, возникает гироскопический момент, приводящий к отклонению поплавка на угол βп в плоскости, перпендикулярной плоскости угла α, то есть возникает перекрестная связь Кпс=βп/α, что, как установлено расчетно-экспериментальным путем, приводит к уменьшению постоянной времени Т (фиг.3) и коэффициента передачи Kп=Uc/Т·ωвх, а стремление повысить Кп за счет увеличения магнитной индукции постоянного кольцевого магнита приводит к увеличению перекрестной связи Кпс, что снижает точность угловой стабилизации снаряда.
Кроме того, конструктивно-технологические трудности возникают при выполнении корпуса сферической камеры из электроизоляционного материала (стекла) (см., например: Савельев В.В. Теория и расчет гироприборов. Вибрационные и гидродинамические гироскопы. Тула: ТПИ, 1985, стр.55-56).
При малой высоте цилиндрического магнитопривода происходит рассеивание магнитного потока Ф постоянного кольцевого магнита и искажение синусоидальной формы напряжения в сигнальной и опорных обмотках, что вызывает дополнительные фазовые ошибки в контуре стабилизации, а значительное увеличение высоты магнитопровода увеличивает габариты и массу датчика угловых отклонений.
Задачей прототипа являлось повышение точности стабилизации снаряда за счет снижения динамических ошибок системы и повышения эффективности управления.
Общими признаками с предлагаемой авторами системой угловой стабилизации вращающегося реактивного снаряда является наличие датчика угловых отклонений с чувствительным элементом, выполненным в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенного в сферической камере, заполненной жидкостью и механически связанной с приводом, цилиндрическим магнитопроводом, сигнальной и двумя опорными обмотками, блока преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход - с газодинамическим исполнительным органом.
В отличие от прототипа в предлагаемой авторами системе угловой стабилизации вращающегося реактивного снаряда датчик угловых отклонений дополнительно снабжен кольцевым короткозамкнутым витком, расположенным между поплавком и цилиндрическим магнитопроводом в плоскости, перпендикулярной оси вращения сферической камеры, высота цилиндрического магнитопровода определяется из соотношения H/h=7,5-9,5, где Н - высота цилиндрического магнитопровода, h - высота постоянного кольцевого магнита, а постоянная времени датчика угловых отклонений выбирается из соотношения 0,4≤Т≤1,7, где Т- постоянная времени [с].
В частном случае, то есть в конкретных формах выполнения, изобретение характеризуется тем, что сферическая камера выполнена из немагнитного электропроводного материала, а короткозамкнутый кольцевой виток образован стенками сферической камеры.
Именно это позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков заявляемого технического решения и достигаемым техническим результатом.
Указанные признаки, отличительные от прототипа и на которые распространяется испрашиваемый объем правовой защиты, во всех случаях достаточны.
Задачей предлагаемого изобретения является повышение точности стабилизации снаряда за счет демпфирования колебаний чувствительного элемента и снижения величины перекрестной связи, а также упрощение конструкции датчика угловых отклонений.
Указанный технический результат при осуществлении изобретения достигается тем, что в известной системе угловой стабилизации вращающегося реактивного снаряда, содержащей датчик угловых отклонений с чувствительным элементом в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенного в сферической камере, заполненной жидкостью и механически связанной с приводом, цилиндрическим магнитопроводом, сигнальной и двумя опорными обмотками, блок преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход - с газодинамическим исполнительным органом, особенность заключается в том, что датчик угловых отклонений дополнительно снабжен кольцевым короткозамкнутым витком, расположенным между поплавком и цилиндрическим магнитопроводом в плоскости, перпендикулярной оси вращения сферической камеры, высота цилиндрического магнитопровода определяется из соотношения H/h=7,5-9,5, где H - высота цилиндрического магнитопровода, h - высота кольцевого магнита, а постоянная времени датчика угловых отклонений выбирается из соотношения 0,4≤T≤1,7, где T - постоянная времени [c].
Новая совокупность конструктивных элементов, а также наличие связей между ними позволяет, в частности, за счет:
- расположения кольцевого короткозамкнутого витка между сферическим поплавком и цилиндрическим магнитопроводом в плоскости, перпендикулярной оси вращения сферической камеры, обеспечить демпфирование собственных колебаний поплавка, что приводит к повышению точности стабилизации снаряда;
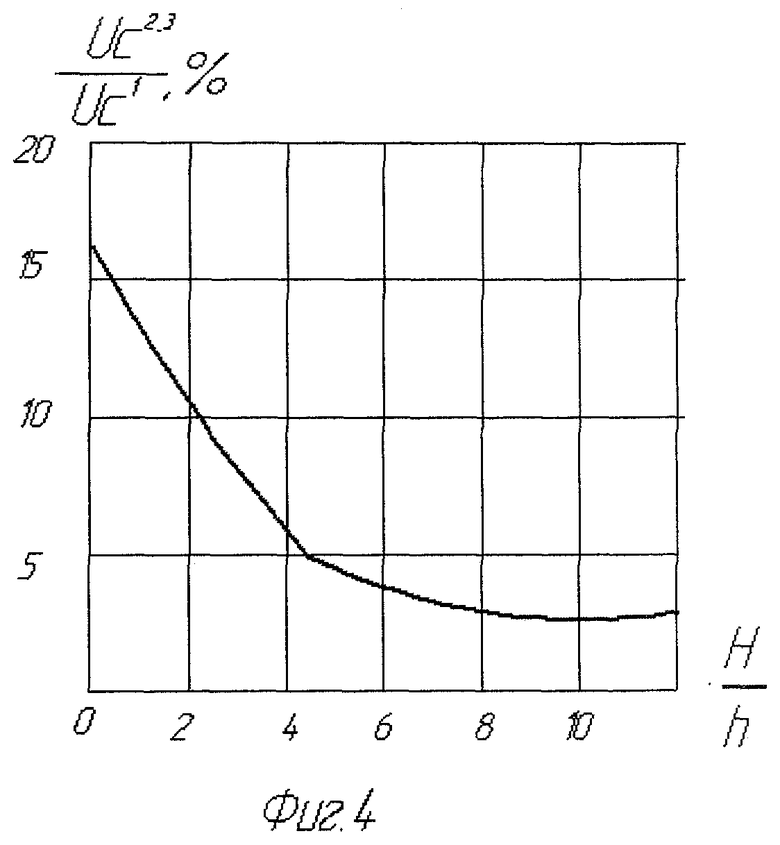
- выполнения цилиндрического магнитопровода с высотой, определяемой из соотношения H/h=7,5-9,5, где H - высота цилиндрического магнитопровода, h - высота постоянного кольцевого магнита, исключить рассеивание магнитного потока и уменьшить величину второй и третьей гармоник синусоидального напряжения в сигнальной обмотке (фиг.4) и, следовательно, уменьшить фазовые ошибки в контуре управления, так как при H/h<7,5 повышается рассеивание магнитного потока, а при H/h>9,5 увеличиваются габариты датчика угловых отклонений;
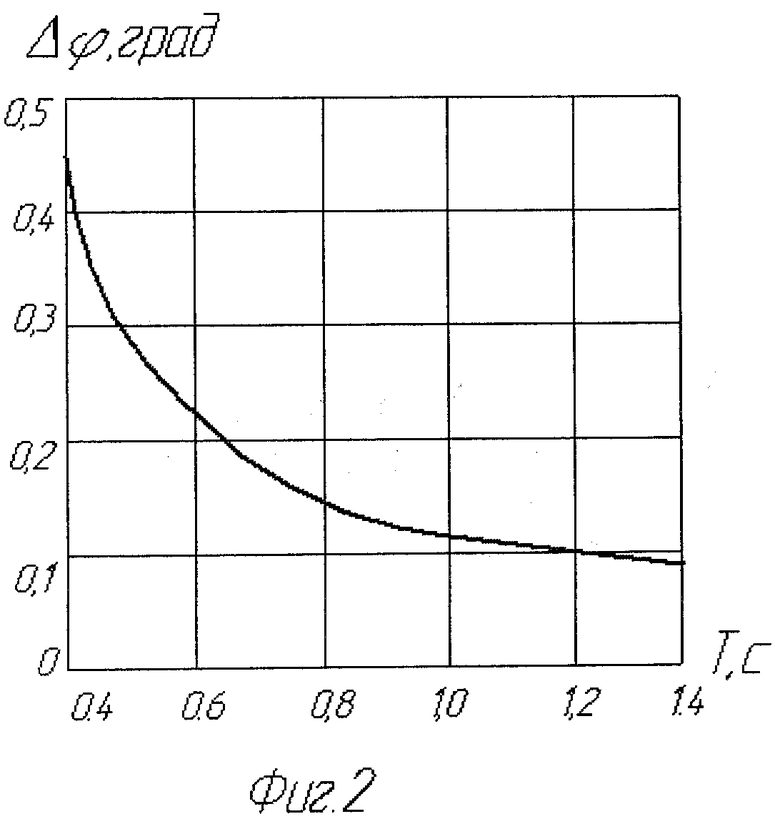
- выполнения величины постоянной времени датчика угловых отклонений 0,4 с≤T≤1,7 с обеспечить необходимую точность стабилизации вращающегося реактивного снаряда, которая при постоянной времени Т<0,4 с резко снижается, а при Т>1,7 с не повышается (фиг.2).
Признаки, характеризующие изобретение в конкретных формах исполнения, позволяют, в частности, за счет выполнения корпуса сферической камеры из электропроводного немагнитного материала, например алюминиевого сплава, упростить конструкцию и технологию изготовления датчика угловых отклонений, так как при этом отпадает необходимость дополнительной установки короткозамкнутого витка в виде кольца внутри цилиндрического магнитопровода или на корпусе сферической камеры при изготовлении ее из электроизоляционного материала, например стекла, а короткозамкнутый виток при этом реализуется стенками корпуса сферической камеры.
Сущность изобретения заключается в том, что в известной системе угловой стабилизации вращающегося реактивного снаряда, содержащей датчик угловых отклонений с чувствительным элементом в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенного в сферической камере, заполненной жидкостью и механически связанной с приводом, цилиндрическим магнитопроводом, сигнальной и двумя опорными обмотками, блок преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход - с газодинамическим исполнительным органом, в отличие от прототипа согласно изобретению датчик угловых отклонений дополнительно снабжен кольцевым короткозамкнутым витком, расположенным между сферическим поплавком и цилиндрическим магнитопроводом в плоскости, перпендикулярной оси вращения сферической камеры, высота цилиндрического магнитопровода определяется из соотношения H/h=7,5-9,5, где H - высота цилиндрического магнитопровода, h - высота постоянного кольцевого магнита, а постоянная времени датчика угловых отклонений выбирается из соотношения 0,4≤T≤1,7, где T - постоянная времени [с].
Сущность предлагаемого изобретения поясняется чертежами, где на фиг.1 изображена схема предлагаемой системы угловой стабилизации вращающегося реактивного снаряда, на фиг.2 - график зависимости точности стабилизации углового положения реактивного снаряда Δφ от постоянной времени T датчика угловых отклонений, на фиг.3 - график зависимости постоянной времени T от коэффициента перекрестной связи датчика угловых отклонений Кпс, а на фиг.4 - график зависимости отношения амплитуд Uc 2 и Uc 3 2 и 3 гармоник соответственно в синусоидальном напряжении Uc сигнальной обмотки к амплитуде 1 гармоники Uc 1 от соотношения высот цилиндрического магнитопровода H и кольцевого постоянного магнита h.
Предлагаемое изобретение содержит датчик угловых отклонений 1, чувствительный элемент 5 в виде сферического поплавка с постоянным кольцевым магнитом 6, размещенным в сферической камере 7, заполненной жидкостью 8 и механически связанной с приводом 9, вращающимся с угловой скоростью ω1, цилиндрический магнитопровод 10, сигнальную обмотку 11 и опорные обмотки 12 и 13, оси которых 14 и 15 расположены взаимно перпендикулярно и перпендикулярны продольной оси снаряда, кольцевой короткозамкнутый виток 16, образованный корпусом сферической камеры 7, выполненной из немагнитного электропроводного материала, блок преобразования сигналов 2 с двумя демодуляторами 17 и 18, газодинамический исполнительный орган 3 с четырьмя соплами 4, причем оси 19 и 20 сопел 4 взаимно перпендикулярны и лежат в плоскости, перпендикулярной продольной оси снаряда.
Снаряд с установленной в нем системой угловой стабилизации вращается вокруг своей продольной оси с угловой скоростью ω.
Система координат OXYZ связана со снарядом, система координат OXпYпZп связана с поплавком 5.
Высота цилиндрического магнитопровода H, высота постоянного кольцевого магнита - h, северный полюс магнита обозначен N, южный полюс - S, магнитный поток постоянного магнита - Ф, магнитный поток короткозамкнутого витка Ф1, вектор измеряемой угловой скорости перемещения продольной оси снаряда -  y, ось вращения сферической камеры 7 совпадает с продольной осью снаряда.
y, ось вращения сферической камеры 7 совпадает с продольной осью снаряда.
Предлагаемое устройство работает следующим образом.
Перед пуском реактивного снаряда привод 9 раскручивает сферическую камеру 7, заполненную жидкостью 8, которая вовлекает во вращение сферический поплавок 5 до угловой скорости ω1. При этом происходит его центрирование в сферической камере 7, а соотношение главных моментов инерции таково, что вектор кинетического момента сферического поплавка 5 совпадает с осью вращения сферической камеры 7.
При угловом перемещении продольной оси снаряда, например, с угловой скоростью  y на поплавок 5 действует гироскопический момент Мг. Поплавок 5 стремится сохранить свое положение в пространстве и между осями вращения камеры 7 OX и поплавка 5 ОХп появляется угол рассогласования α=Т·
y, где Т - постоянная времени датчика угловых отклонений. С появлением угла рассогласования α на поплавок действует момент сил вязкого трения Мвт, который уравновешивает гироскопический момент Mг. При этом вследствие малой вязкости жидкости 8, которой заполнена сферическая камера 7, поплавок 5 от полученного возмущения совершает колебания относительно оси OYп на собственной частоте, а ток в короткозамкнутом витке 16 вследствие наведенной ЭДС при пересечении последнего магнитным потоком Ф постоянного магнита 6 вызывает магнитный поток Ф1, который, взаимодействуя с постоянным магнитом 6, установленным в поплавке 5, обеспечивает демпфирование (быстрое затухание) собственных колебаний поплавка 5.
y на поплавок 5 действует гироскопический момент Мг. Поплавок 5 стремится сохранить свое положение в пространстве и между осями вращения камеры 7 OX и поплавка 5 ОХп появляется угол рассогласования α=Т·
y, где Т - постоянная времени датчика угловых отклонений. С появлением угла рассогласования α на поплавок действует момент сил вязкого трения Мвт, который уравновешивает гироскопический момент Mг. При этом вследствие малой вязкости жидкости 8, которой заполнена сферическая камера 7, поплавок 5 от полученного возмущения совершает колебания относительно оси OYп на собственной частоте, а ток в короткозамкнутом витке 16 вследствие наведенной ЭДС при пересечении последнего магнитным потоком Ф постоянного магнита 6 вызывает магнитный поток Ф1, который, взаимодействуя с постоянным магнитом 6, установленным в поплавке 5, обеспечивает демпфирование (быстрое затухание) собственных колебаний поплавка 5.
При пересечении магнитным потоком Ф витков сигнальной обмотки 11 в ней наводится напряжение, амплитуда которого пропорциональна вектору измеряемого углового отклонения продольной оси снаряда, фаза определяет его направление, а частота равна частоте вращения чувствительного элемента.
Одновременно в опорных обмотках 12 и 13 постоянный кольцевой магнит 6 наводит переменные напряжения постоянной амплитуды, сдвинутые по фазе на 90°.
Напряжение сигнальной обмотки 11 и опорных обмоток 12 и 13 подается на вход блока преобразования сигналов 2, представляющего собой, например, два амплитудно-фазовых демодулятора 18 и 19 с фильтрами НЧ. На выходе последних получается два управляющих сигнала, сдвинутых по фазе на 90° и соответствующих измеряемому значению углового положения снаряда на частоте его вращения ω.
Управляющие сигналы поступают на газодинамический исполнительный орган 3, сопла 4 которого по отношению к опорным обмоткам 12 и 13 установлены под углом φ, учитывающим угловую скорость собственного вращения снаряда ω, запаздывание исполнительного органа τ, перекрестную связь датчика угловых отклонений Кпс, угол сдвига фазы ξ, вносимый короткозамкнутым витком. Разложение управляющих сил исполнительного органа 3 по плоскостям тангажа и рыскания в связанной со снарядом системе координат обеспечивает парирование угловых движений продольной оси снаряда, то есть стабилизацию его углового положения.
Выполнение системы угловой стабилизации вращающегося реактивного снаряда в соответствии с изобретением позволило повысить точность стабилизации снаряда за счет снижения динамических ошибок системы и более эффективного управления, что в целом улучшило точностные характеристики РСЗО в 1,5-2 раза и упростило конструкцию.
Указанный положительный эффект подтвержден стендовыми и летно-конструкторскими испытаниями опытных образцов, выполненных в соответствии с изобретением.
В настоящее время разработана конструкторская документация, намечено серийное производство системы угловой стабилизации вращающегося реактивного снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2010 |
|
RU2435129C1 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ СНАРЯДА | 2013 |
|
RU2525576C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2410645C1 |
| Устройство угловой стабилизации вращающегося реактивного снаряда | 2020 |
|
RU2761912C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2310163C1 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2000 |
|
RU2181875C2 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2001 |
|
RU2205355C2 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2230293C1 |
| ПРЕОБРАЗОВАТЕЛЬ СИГНАЛОВ УСТРОЙСТВА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2005 |
|
RU2382321C2 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2002 |
|
RU2231015C1 |
Изобретение относится к области военной техники, а именно к системам управления вращающимися ракетами. Технический результат - упрощение конструкции устройства и повышение точности работы системы угловой стабилизации. Система угловой стабилизации вращающегося реактивного снаряда содержит датчик угловых отклонений с чувствительным элементом в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенный в сферической камере, заполненной жидкостью и механически связанной с приводом. Система также содержит цилиндрический магнитопровод, сигнальную и две опорные обмотки, блок преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход - с газодинамическим исполнительным органом. Датчик угловых отклонений снабжен кольцевым короткозамкнутым витком, расположенным между сферическим поплавком и цилиндрическим магнитопроводом в плоскости, перпендикулярной оси вращения сферической камеры, высота цилиндрического магнитопровода определяется из соотношения H/h=7,5-9,5, где Н - высота цилиндрического магнитопровода, h - высота постоянного кольцевого магнита, а постоянная времени датчика угловых отклонений выбирается из соотношения 0,4≤Т≤1,7, где Т - постоянная времени [с], а короткозамкнутый виток выполнен в виде корпуса сферической камеры из немагнитного электропроводного материала. 1 з.п. ф-лы, 4 ил.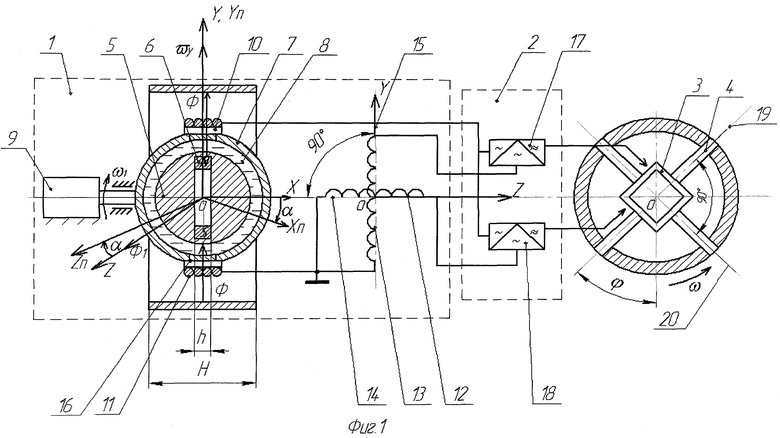
1. Система угловой стабилизации вращающегося реактивного снаряда, содержащая датчик угловых отклонений с чувствительным элементом в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенным в сферической камере, заполненной жидкостью и механически связанной с приводом, цилиндрическим магнитопроводом, сигнальной и двумя опорными обмотками, блок преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход - с газодинамическим исполнительным органом, отличающаяся тем, что датчик угловых отклонений дополнительно снабжен кольцевым короткозамкнутым витком, расположенным между сферическим поплавком и цилиндрическим магнитопроводом в плоскости, перпендикулярной оси вращения сферической камеры, высота цилиндрического магнитопровода определена соотношением H/h=7,5-9,5, где Н - высота цилиндрического магнитопровода, h - высота постоянного кольцевого магнита, а постоянная времени датчика угловых отклонений выбрана из соотношения 0,4≤Т≤1,7, где Т - постоянная времени, с.
2. Система по п.1, отличающаяся тем, что сферическая камера выполнена из немагнитного электропроводного материала, а короткозамкнутый кольцевой виток образован стенками сферической камеры.
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 1998 |
|
RU2126129C1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| Экономайзер | 0 |
|
SU94A1 |
| US 4168813 A, 25.09.1979. | |||

