Настоящее изобретение относится к способу и устройству для поперечного управления летательным аппаратом осуществляющим руление, в частности, в аэропорту.
Настоящее изобретение относится к рулению летательного аппарата, в частности, гражданского или военного, пассажирского или грузового транспортного самолета, или даже беспилотного самолета. Более конкретно, оно относится к формированию момента поворота (по вертикальной оси летательного аппарата), предоставляющего возможность управления летательным аппаратом осуществляющим руление.
В пределах настоящего изобретения руление означает любой возможный тип передвижения для летательного аппарата, такого как передвижение по посадочной полосе во время этапа посадки и взлета, или, в частности, передвижение по полосе движения или на площадях маневрирования.
Сегодня пилот управляет поперечными перемещениями летательного аппарата на земле с использованием органов ручного управления (например, маховика, предоставляющего возможность ориентирования колеса переднего шасси, рычага управления для управления тягой двигателя, тормозных педалей, курсовой крестовины), вдоль траектории на земле. Такие органы управления предоставляют возможность управления исполнительными механизмами летательного аппарата, способными влиять на поперечные перемещения летательного аппарата по существу благодаря ориентации переднего колеса (и, не обязательно, ориентации задних приводов) и руля направления дрейфа, а более редко, посредством асимметричного использования двигателей и тормозов.
В контексте настоящего изобретения переднее колесо означает механический узел, снабженный по меньшей мере одним колесом, располагаемый в передней части летательного аппарата, предпочтительно, являющийся частью переднего шасси летательного аппарата и ориентируемый так, чтобы смещать летательный аппарат в поперечном направлении, когда он осуществляет руление.
В настоящее время, в случае поломки системы ориентации переднего колеса (например, в случае потери из гидравлической системы, питающей исполнительный механизм, ответственный за ориентацию, в случае поломки самого исполнительного механизма, или даже в случае потери передачи данных между вычислителем, управляющим исполнительным механизмом и последним), летательный аппарат больше не мог бы управляться в поперечном направлении через обычные органы управления (маховик, курсовую крестовину), и это, в особенно большей степени, на низкой скорости, когда руль направления больше не оказывает значительного влияния на момент поворота летательного аппарата.
Иногда в полете или после приземления возникают такие типы поломки, которые могли бы сделать этап приземления опасным. В случае потери управления передним колесом, приземление больше не могло бы выполнятся системой автоматического управления, и пилот мог бы использовать только руль курсового направления, а также, при необходимости, тормоза несимметричным образом, благодаря тормозным педалям, маневр, который, однако, не привычен пилоту. Такая ситуация может быть затруднительной, или даже опасной, и приводить к отклонению от взлетно-посадочной полосы на более или менее высокой скорости, если пилот не преуспевает в надлежащем управлении летательным аппаратом (например, вследствие бокового ветра, поломки двигателя,...), которое могло бы привести к людским и/или финансовым потерям или ущербу.
Как только летательный аппарат остановился на торце взлетно-посадочной полосы, им по-прежнему можно управлять в поперечном направлении, используя тормоза и/или двигатели асимметричным образом, и это для того, чтобы быстро очищать взлетно-посадочную полосу и делать ее доступной для летательных аппаратов, которые должны приземляться или взлетать. Однако рабочая инструкция авиалинии обычно заключается в вынуждении пилота, принимая во внимание рискованное и потенциально опасное управление, являющееся следствием асимметричного ручного использования тормозов и/или двигателей, призывать управление наземным движением, с тем чтобы отправить буксировочный тягач для буксировки летательного аппарата с торца взлетно-посадочной полосы в разрешенную диспетчером зону аэропорта (на зависимый путь, к посадочному шлюзу,...). На самом деле ручное поперечное управление летательным аппаратом, пользующееся асимметричным применением тормозов и двигателей, могло бы быть особенно затруднительным для пилота, не являющегося знакомым с таким типом маневрирования, тем более, в то время как управление могло бы быть затруднительным для летательных аппаратов большого размера (например, типа AIRBUS A340-600 или A380), когда переднее колесо действует правильно (необходимо использовать внешнюю камеру при резких поворотах).
В течение времени ожидания буксировочного тягача и времени буксировки летательный аппарат, таким образом, загромождает взлетно-посадочную полосу и, следовательно, мешает движению на земле (летательные аппараты на взлет должны ждать изменения траектории летательных аппаратов на земле, если их движение находится под влиянием буксируемого летательного аппарата), а также воздушному движению (возможное изменение направления в другие аэропорты для летательных аппаратов, которые были на этапе захода на посадку, задержка взлета для летательных аппаратов, ожидающих, чтобы освободилась взлетно-посадочная полоса). Следствием такой ситуации являются потенциально значительные задержки, для вышедшего из строя летательного аппарата, а также для летательных аппаратов, находящихся под влиянием воздушного движения, и движение на земле нарушается. Следствием таких задержек являются высокие затраты для авиакомпаний (в частности, финансовая и материальная компенсация для пассажиров, в особенно большей степени, если летательные аппараты должны подвергаться изменению маршрута).
Более того, летательному аппарату запрещается подниматься в воздух, в то время как устраняется поломка. Такое время запрещения подниматься в воздух могло бы быть особенно длительным, если запасные части не будут иметься в распоряжении в аэропорту, или если ремонт не будет производиться в аэропорту, в частности, если аэропорт изолирован (или если он расположен на удаленной местности). Затраты на запрещение подниматься в воздух, таким образом, особенно высоки, в наибольшей степени, если запасное оборудование должно поставляться из удаленного местоположения, или если дополнительный летательный аппарат должен быть зафрахтован для обеспечения воздушной линии связи и/или для возвращения пассажиров на родину.
Настоящее изобретение относится к способу поперечного управления летательным аппаратом, в частности гражданским или военным транспортным самолетом, передвигающимся по земле, снабженным ориентируемым передним колесом, при этом заявленный способ предусматривает преодоление указанных выше недостатков.
Для этого согласно изобретению способ примечателен тем, что:
a) команды управления принимают относительно управления ориентацией переднего колеса;
b) принимают текущую скорость относительно земли летательного аппарата; и
c) из команд управления и текущей скорости относительно земли автоматически определяют первые команды для по меньшей мере одного из следующих узлов управления летательного аппарата: набор тормозов и набор двигателей, каждый из узлов управления выполнен с возможностью формирования поперечного перемещения летательного аппарата вокруг вертикальной оси посредством асимметричного действия, при этом первые команды определяют для того, чтобы формировать на летательном аппарате, когда они применяются к соответствующему узлу управления, поперечное перемещение, по существу идентичное поперечному перемещению, которое формировало бы применение команд управления к переднему колесу.
Более того, предпочтительно:
команды управления формируются с помощью средства для предпочтительного формирования обычных команд, например, обычных органов управления или обычной системы автопилота;
измеряется текущая скорость относительно земли летательного аппарата; и
на следующем этапе d) первые команды автоматически применяются к узлу(ам) управления.
Таким образом, обладающий признаками изобретения способ предоставляет летательному аппарату возможность управления на земле по поперечной оси, в том числе в случае потери управления передним колесом. В частности, упомянутый способ предназначен для обеспечения минимального курсового управления, позволяющего пилоту по меньшей мере быстро очищать посадочную полосу, когда система ориентации переднего колеса летательного аппарата больше не работает надлежащим образом, и это посредством использования тормозов и/или двигателей асимметричным образом.
Более того, для формирования команд управления используются те же самые органы управления, что и в номинальном случае (случае, где система ориентации переднего колеса работает надлежащим образом), то есть, в настоящее время, маховиков и тяг руля направления. Очевидно, другие органы управления, существующие или нет, могли бы использоваться для ручного управления такой функцией, например, органы, предусмотренные для второго пилота с целью быстроты отклонения от курса. Во всех случаях пилот не пользуется тормозными педалями и/или рычагами управления тягой двигателей для поперечного управления летательным аппаратом согласно вышеупомянутому основному варианту осуществления способа по изобретению.
Более того, с использованием такого способа, поведение летательного аппарата (в показателях динамики и ощущения точки обзора пилота) очень похоже на поведение в номинальном случае. Так как он также использует те же самые органы управления, что и в номинальном случае, использование такой функции, следовательно, почти прозрачно для пилота, который в таком случае может сохранять свои навыки ручного управления для наземных маневров, обычно требующих переднего колеса. Как результат, осуществление настоящего изобретения не требует никакой адаптации от пилота, и он, таким образом, не будет удивлен поведением функции согласно изобретению, которая может автоматически приниматься от обычного поперечного управления летательным аппаратом, в конкретном варианте осуществления, который будет описан ниже, в случае внезапной поломки системы ориентации переднего колеса. Это делает этап ручного приземления гораздо более надежным, так как пилот может точно управлять летательным аппаратом, как он делал бы в номинальном случае, таким образом снижая его рабочую нагрузку и его напряжение во время маневра, требующего много внимания.
Более того, осуществление способа операций согласно этому изобретению может управляться человеком-пилотом вручную (с помощью обычных или будущих органов управления), а также автоматически, обычной системой автопилота. Следовательно, можно сохранять систему автопилота для всех существующих наземных автоматических функций (автоматической или частично автоматической посадки), а также будущих функций (автоматического или частично автоматического взлета, автоматической или частично автоматического руления).
Более того, летательный аппарат больше не является зависимым от помощи извне (такой как буксировочный тягач) для очистки взлетно-посадочной полосы после приземления. Следовательно, окружающее воздушное движение не нарушается.
Аналогичным образом, летательный аппарат больше не является зависимым от помощи извне (буксировочного тягача) для достижения посадочного шлюза. Он мог бы выполнять такой маневр автономно. Следовательно, движение на земле не нарушается, а летательный аппарат больше не ответственен за задержки, обычно вызываемые поломкой системы ориентации переднего колеса, следствием которых являются высокие затраты для авиакомпаний.
Благодаря настоящему изобретению оно также могло бы предполагаться для повторного запуска летательного аппарата (с или без пассажиров и/или груза), даже когда поломка системы ориентации переднего колеса по-прежнему присутствует. В результате летательному аппарату больше не запрещается подниматься в воздух вследствие ремонтного периода или запасных частей или оборудования, которые должны быть доставлены. Следовательно, ремонт мог бы происходить гораздо более гибким образом, так как основные пространственные (летательный аппарат может достигать другого аэропорта для ремонта в нем) и временные (летательный аппарат мог бы ремонтироваться позже) ограничения исчезают.
Предпочтительно, на этапе c):
c1) рассчитывается угол ориентации переднего колеса, представляющий команды управления;
c2) текущая кривая рассчитывается у траектории летательного аппарата, такая как могла бы быть, если бы переднее колесо было ориентировано согласно углу ориентации; и
c3) из по меньшей мере обычной кривой и текущей скорости относительно земли, рассчитываются первые команды.
Более того, в конкретном варианте осуществления, предпочтительно:
команды управления вырабатываются относительно управления ориентацией переднего колеса, причем переднее колесо способно ориентироваться посредством обычной системы ориентации;
система ориентации автоматически контролируется для определения поломки такой системы ориентации; и
до тех пор, пока поломка не была определена, команды управления автоматически применяются к системе ориентации переднего колеса, и указанные выше этапы a)-d) не выполняются; и
как только определена поломка, выполняются этапы a)-d), и команды управления не применяются к системе ориентации переднего колеса.
Реализация такого конкретного варианта осуществления не требует никакого времени адаптации от пилота. Таким образом, пилот не будет удивлен поведением функции, перехватывающей поперечное управление летательным аппаратом, в случае внезапной поломки системы ориентации переднего колеса. Это делает этап ручного приземления гораздо более надежным, так как пилот может точно управлять летательным аппаратом, как он делал бы в номинальном случае, таким образом, снижая его рабочую нагрузку и его напряжение во время маневра, требующего много внимания.
Более того, в конкретном варианте осуществления:
принимается общая команда управления по моменту поворота летательного аппарата, осуществляющего руление;
такая общая команда автоматически раскладывается:
на команды управления, относящиеся к управлению ориентацией переднего колеса; и
на вспомогательные команды;
для команд управления, выполняются этапы a)-d); и
вспомогательные команды автоматически применяются к вспомогательному средству, выполненному с возможностью воздействия на поперечное перемещение летательного аппарата.
В таком конкретном варианте осуществления осуществление [этапов a) - d)] способа согласно настоящему изобретению могло бы рассматриваться в качестве дополнительного операционного средства, предоставляющего возможность для поперечного управления летательным аппаратом. Такой конкретный вариант осуществления может использоваться для распределения механических напряжений, необходимых для создания момента поворота, по разным исполнительным механизмам, таким как система ориентации переднего колеса, курсовой руль направления, асимметричное использование тормозов и асимметричное использование двигателей.
Благодаря настоящему изобретению торможение и/или асимметричная тяга могли бы использоваться для дополнения и/или замещения других исполнительных механизмов, влияющих на поперечные перемещения летательного аппарата, и это даже в отсутствие поломки одного или более таких исполнительных механизмов.
Более того, в конкретном варианте осуществления:
дополнительные вторые команды принимаются для управления узлом управления, в частности набором тормозов, вторые команды вырабатываются обычным образом;
из таких вторых команд и первых команд определяются общие команды; и
на этапе d), общие команды применяются к узлу управления в качестве полученных из первых и вторых команд.
Таким образом, осуществление способа согласно этому изобретению не исключает никакого полезного использования набора двигателей и/или набора тормозов пилотом, который может приводить в действие такие наборы с использованием обычных органов управления, для того чтобы формировать вторые команды, в таком случае, принимаемые во внимание, как указано в предыдущем варианте осуществления. Следовательно, благодаря такому конкретному варианту осуществления пилот более точно сохраняет способность торможения посредством своих тормозных педалей.
Более того, предпочтительно, определяются первые команды, содержащие как команды для набора тормозов, так и команды для набора двигателей, а на этапе d), такие команды соответственно применяются к набору тормозов и к набору двигателей.
Более того, предпочтительно, перед применением первых команд к узлу управления такие первые команды ограничиваются максимальными значениями, если они выше, чем последние.
Настоящее изобретение также относится к устройству для поперечного управления летательным аппаратом, осуществляющим руление, в частности транспортным самолетом, снабженным ориентируемым передним колесом.
Согласно настоящему изобретению, устройство примечательно тем, что оно содержит:
средство приема команд управления, относящихся к управлению ориентацией переднего колеса;
средство приема текущей скорости относительно земли летательного аппарата; и
средство для автоматического определения, из команд управления и текущей скорости относительно земли, первых команд для по меньшей мере одного из следующих узлов управления летательного аппарата: набора тормозов и набора двигателей, каждый из узлов управления выполнен с возможностью формирования поперечного перемещения летательного аппарата вокруг вертикальной оси благодаря асимметричному действию, при этом первые команды определяются для формирования на летательном аппарате, когда они применяются к соответствующему узлу управления поперечного перемещения, по существу идентичного поперечному перемещению, которое формировало бы применение команд управления к переднему колесу.
В предпочтительном варианте осуществления устройство поперечного управления дополнительно содержит:
средство вырабатывания команд управления;
средство измерения текущей скорости относительно земли летательного аппарата; и
средство автоматического применения первых команд к узлу(ам) управления.
Кроме того, настоящее изобретение относится к летательному аппарату, снабженному устройством поперечного управления, как упомянутое выше.
Прилагаемые чертежи ясно поясняют каким образом может быть реализовано настоящее изобретение. На чертежах одинаковые ссылочные позиции относятся к аналогичным элементам.
Фиг.1 - структурная схема устройства согласно этому изобретению в основном варианте осуществления.
Фиг.2 и 3 схематично показывают конкретные варианты осуществления устройства согласно настоящему изобретению.
Фиг.4 схематично иллюстрирует блок расчета устройства согласно этому изобретению.
Фиг.5 - структурная схема предпочтительного варианта осуществления средства расчета из блока расчета, показанного на фиг.4.
Устройство 1, согласно настоящему изобретению и схематично показанное на фиг.1, должно использоваться для поперечного управления летательным аппаратом, осуществляющим руление, не показанным, в частности, в аэропорту. Такой летательный аппарат, в частности, мог бы быть гражданским или военным самолетом, самолетом для транспортировки пассажиров или товаров (грузов), или беспилотным самолетом.
Устройство 1, более точно, относится к формированию момента поворота (по вертикальной оси летательного аппарата), предусматривающего поперечное управление летательным аппаратом, осуществляющим руление. В контексте настоящего изобретения руление означает любой возможный тип передвижения для летательного аппарата, такой как передвижение по посадочной полосе во время этапа посадки и взлета, или, в частности, передвижение по полосам движения или на площадях маневрирования.
Согласно изобретению устройство 1 содержит, как показано на фиг.1:
средство 2, которое будет дополнительно описано ниже, для вырабатывания команд управления, относящихся к управлению ориентацией переднего колеса (не показано) летательного аппарата. В контексте настоящего изобретения переднее колесо является механическим узлом, снабженным по меньшей мере одним колесом, располагаемым в передней части летательного аппарата, предпочтительно, являющимся частью переднего шасси летательного аппарата и ориентируемым так, чтобы смещать летательный аппарат в поперечном направлении, когда он осуществляет руление.
Набор 3 источников информации, более конкретно, содержащий средство измерения, обычным образом, обычной скорости относительно земли летательного аппарата;
блок 4 расчета, присоединенный посредством линий 5 и 6 связи, соответственно, к средству 2 и к набору 3. Такой блок 4 расчета выполнен так, чтобы автоматически определять, из команд управления и текущей скорости относительно земли, первые команды для по меньшей мере одного из следующих узлов управления: набора тормозов E1 летательного аппарата и набора двигателей E2 летательного аппарата. Каждый из узлов управления выполнен с возможностью формирования поперечного перемещения летательного аппарата вокруг вертикальной оси посредством асимметричного действия (по сравнению с продольной плоскостью симметрии летательного аппарата). Первые команды определяются блоком 4 расчета для того, чтобы формировать на летательном аппарате, когда они применяются к соответствующему узлу управления, поперечное перемещение, по существу идентичное поперечному перемещению, которое (обычно) формировало применение к системе ориентации переднего колеса; и
средство 7 автоматического применения первых команд к набору тормозов E1 и/или к набору двигателей E2.
Как дополнительно описано ниже со ссылкой на фиг.4 и 5, блок 4 расчета содержит средства, соответственно, для:
расчета угла ориентации переднего колеса, представляющего команды управления (вырабатываемые средством 2);
расчета текущей кривой у траектории (летательного аппарата), такой как была бы, если бы переднее колесо было ориентировано согласно такому углу ориентации; и
расчета первых команд из по меньшей мере текущей кривой и измеренной текущей скорости относительно земли.
Устройство 1 согласно настоящему изобретению, таким образом, обеспечивает возможность управления летательным аппаратом на земле по поперечной оси, в частности, в случае потери управления передним колесом, как дополнительно описано ниже. Следовательно, указанное устройство предназначено для обеспечения минимального курсового управления, позволяющего пилоту по меньшей мере быстро очищать посадочную полосу, когда система ориентации переднего колеса летательного аппарата больше не работает надлежащим образом, с использованием набора тормозов E1 и/или набора двигателей E2, и это асимметричным образом.
В контексте настоящего изобретения средство 2, предпочтительно, обычное средство для формирования команд управления, относящихся к управлению ориентацией переднего колеса летательного аппарата. Более конкретно, средство 2 могло бы содержать:
органы 9 управления, например, маховик, позволяющий пилоту летательного аппарата вручную вырабатывать команды управления, относящиеся к ориентации переднего колеса летательного аппарата; и/или
систему 10 автопилота, обеспечивающую возможность автоматического вырабатывания, обычным образом, команды управления касательно ориентации переднего колеса.
Следовательно, устройство 1 могло бы использовать те же самые органы управления, что и в номинальном случае (случае, где система ориентации переднего колеса работает надлежащим образом), то есть, маховиков и тяг руля направления. Следует отметить, что другие органы управления, существующие или нет, могли бы использоваться для ручного управления такой функцией, например органы, предусматривающие поперечное управление с целью быстроты отклонения от курса. В любом случае пилот не пользуется тормозными педалями и/или рычагами управления тягой двигателей для поперечного управления летательным аппаратом при реализации выше основного варианта осуществления устройства 1.
Более того, с использованием такого устройства 1 поведение летательного аппарата (в показателях динамики и ощущения точки обзора пилота) очень похоже на поведение в номинальном случае. Так как оно также использует те же самые органы управления, что и в номинальном случае, использование такой функции, следовательно, почти прозрачно для пилота, который, в таком случае, может сохранять свои навыки ручного управления для маневров на земле, обычно требующих переднего колеса. В результате, использование такого устройства 1 не требует никакой адаптации от пилота, и он, таким образом, не был бы удивлен поведением функции, которая может автоматически забираться у обычного поперечного управления летательным аппаратом в случае внезапной поломки системы ориентации переднего колеса.
Более того, устройство 1 могло бы управляться человеком-пилотом вручную (с помощью обычных или будущих органов 9 управления), а также автоматически, обычной системой 10 автопилота. Следовательно, можно сохранять систему 10 автопилота, существующую на летательном аппарате для всех существующих наземных автоматических функций (автоматической или частично автоматической посадки), а также будущих функций (автоматического или частично автоматического взлета, автоматического или частично автоматического передвижения).
Средство 7, предназначенное для применения первых команд управления к набору тормозов E1 и/или к набору двигателей E2, так что они вырабатывают асимметричное воздействие на летательный аппарат, для того чтобы добиваться поперечного перемещения последнего, содержит:
узел E управления, содержащий набор тормозов E1 и/или набор двигателей E2; и
набор B средств B1 и B2 приведения в действие наборов E1 и E2, набор B принимает первые команды из блока 4 расчета через линию 11 связи и применяет их к узлу E, как проиллюстрировано с помощью линии 12 связи в разнородных линиях, показанных на фиг.1.
Для реализации поперечного управления согласно настоящему изобретению, устройство 1, таким образом, может воздействовать:
на один из наборов E1 и E2 управления летательного аппарата, то есть на тормоза или двигатели;
или одновременно на оба набора E1 и E2 управления, то есть как на тормоза, так и на двигатели летательного аппарата.
В конкретном варианте осуществления устройство 1 также могло бы содержать:
обычное средство 14 управления для тормозов из набора E1, присоединенное через линию 15 связи к блоку 4 расчета; и/или
обычное средство 16 управления для набора двигателей E2, например, присоединенное через линию 17 связи к блоку 4 расчета.
В таком случае, в конкретном применении, блок 4 расчета (или набор B) принимает, в дополнение к первым командам, определенным блоком 4 расчета, вторые команды, сформированные средством 14 управления (и/или средством 16 управления), и он определяет, из таких первых и вторых команд, общие команды. В таком случае средство B1 приведения в действие, применяет, при необходимости, обычные команды, относящиеся к тормозам, к набору E1, а средство B2 приведения в действие применяет, при необходимости, общие команды, относящиеся к двигателям, к набору E2.
Следовательно, благодаря средству 14 управления, в частности тормозным педалям, и принимая во внимание (вторые) команды, выработанные таким средством 14 управления, пилот сохраняет способность тормозить. Аналогичным образом, с использованием средства 16 управления, в частности рычагов управления тягой, и принимая во внимание (вторые) команды, выработанные таким средством 16 управления, пилот сохраняет способность увеличивать тягу летательного аппарата и, таким образом, его скорость.
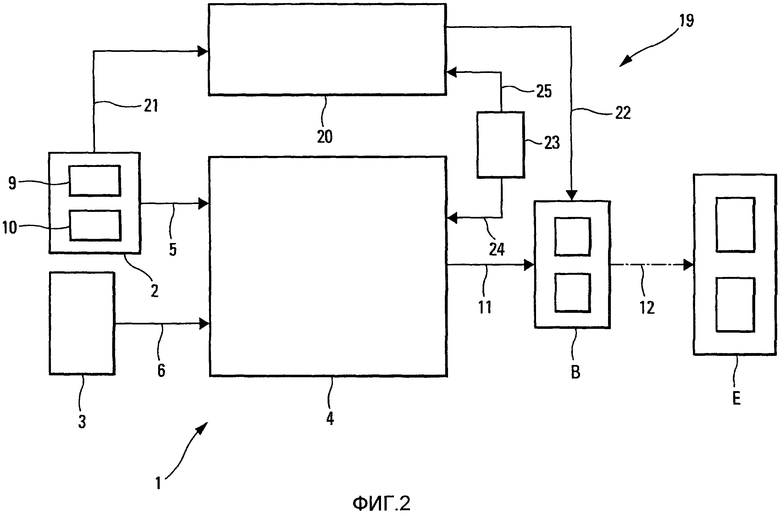
Более того, в конкретном варианте осуществления, как показано на фиг.2, устройство 1 дополнительно содержит обычную систему 19 ориентации, предназначенную для управления ориентацией переднего колеса летательного аппарата. Такая система (19) ориентации содержит:
блок 20 расчета, принимающий команды управления, сформированные средством 2, через линию 21 связи и передает команды приведения в действие, соответствующие набору B, через линию 22 связи; и
систему 23 контроля для автоматического контроля системы 19 ориентации для того, чтобы определять ее поломку.
В этом конкретном варианте осуществления устройство 1 выполнен так, что:
до тех пор, пока поломка не определена системой 23 контроля, устройство 1 автоматически применяло (обычным образом) команды управления, сформированные средством 2, к переднему колесу через систему 19 ориентации, а приведение в исполнение блока 4 расчета (и выше функций согласно этому изобретению) запрещено; и
как только поломка определена системой 23 контроля, например, передающей информацию об этом через линии 24 и 25 связи в блоки 4 и 20 расчета, устройство 1 осуществляло поперечное управление согласно этому изобретению посредством блока 4 расчета, а система 19 ориентации больше не применяла команды управления, сформированные средством 2, к переднему колесу.
Реализация такого конкретного варианта осуществления не требует никакого времени адаптации от пилота. Таким образом, пилот не будет удивлен поведением функции, перехватывающей поперечное управление летательным аппаратом в случае внезапной поломки системы 19 ориентации переднего колеса. Это делает этап ручного приземления гораздо более надежным, так как пилот может точно управлять летательным аппаратом, как он делал бы в номинальном случае, таким образом снижая его рабочую нагрузку и его напряжение во время маневра, требующего много внимания.
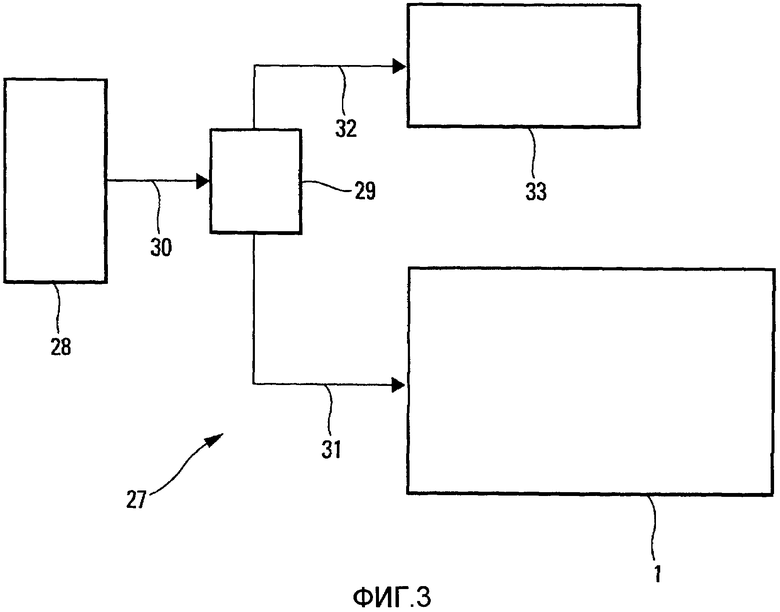
Более того, устройство 1 могло бы быть частью системы, дополнительно содержащей, как показано на фиг.3:
обычное средство 28 для формирования общей команды управления моментом поворота летательного аппарата осуществляющего руление; и
средство 29, присоединенное через линию 30 связи к упомянутому средству 28 и автоматически раскладывающее такую общую команду:
на команды управления, относящиеся к управлению ориентацией переднего колеса, передаваемые через линию 31 связи в устройств (применяющее их, как описано выше); и
на вспомогательные команды, передаваемые через линию 32 связи в по меньшей мере один узел 33, например курсовой руль направления летательного аппарата или систему ориентации переднего колеса.
Такой узел 33 сформирован для применения таких вспомогательных команд к летательному аппарату, для того чтобы воздействовать на поперечные перемещения летательного аппарата.
В таком конкретном варианте осуществления, показанном на фиг.3, устройство 1 могло бы рассматриваться в качестве дополнительного исполнительного механизма, обеспечивающего летательному аппарату возможность управления в поперечном направлении. Задача системы 27, в таком случае, включает использование торможения и/или асимметричной тяги в дополнение (и/или взамен) к другим исполнительным механизмам (узлу 33), влияющим на поперечные перемещения летательного аппарата, и это даже в отсутствие поломки одного или более таких исполнительных механизмов. Такой конкретный вариант осуществления может использоваться для распределения механических напряжений, необходимых для создания момента поворота, по разным исполнительным механизмам, таким как система ориентации переднего колеса, курсовой руль направления, асимметричное использование тормозов и асимметричное использование двигателей.
Как отмечено выше, что касается поперечного управления летательным аппаратом согласно этому изобретению, устройство 1 может реализовывать несимметричное использование тормозов или реализовывать асимметричное использование двигателей. В последующем описании блока 4 расчета будет описано только асимметричное использование тормозов.
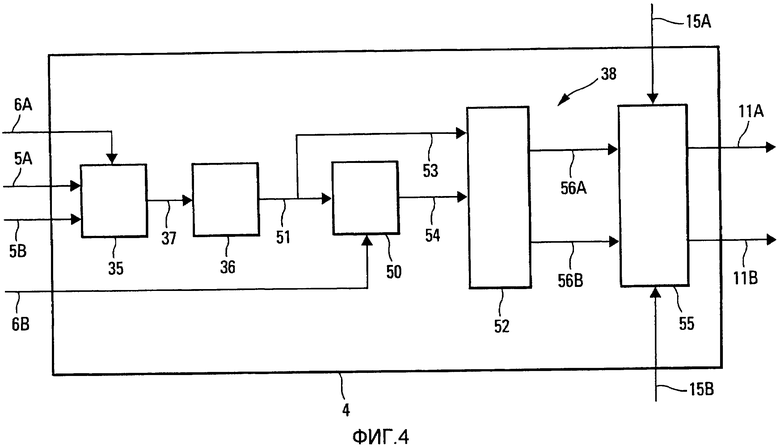
В этом случае, как показано на фиг.4, блок 4 расчета содержит:
средство 35 для расчета, по командам управления, принятым с органов 9 ручного управления через линию 5A связи, и/или командам управления, принятым из системы 10 автопилота через линию 5B связи, а также по измерениям, принятым из узла 3 через линию 6A связи, угла β ориентации переднего колеса, представляющего команды управления;
средство 36, присоединенное через линию 37 связи к средству 35 и сформированное для того, чтобы рассчитывать обычную кривую траектории летательного аппарата, как она была бы, если бы переднее колесо ориентировалось согласно углу β ориентации, принятому из средства 35; и
средство 38 расчета первых команд по обычной кривой, принятой из средства 36, а также по измерениям, которые будут описаны ниже, принятым через линию 6B, связи.
Линии 5A и 5B на фиг.4 являются частью линии 5 связи, показанной на фиг.1, а линии 6A и 6B связи являются частью линии 6 связи.
Средство 35, таким образом, рассчитывает угол β ориентации переднего колеса. Такой угол β ориентации обычно является таким, что обычно отправляется на исполнительный механизм, ориентирующий переднее колесо, когда он работает надлежащим образом.
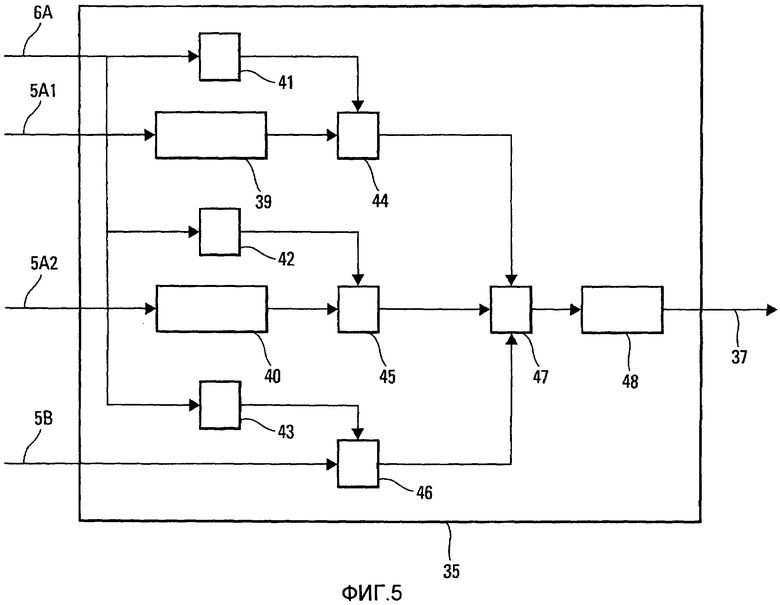
Средство 35 могло бы достигаться согласно двум разным вариантам осуществления. В первом варианте осуществления, показанном на фиг.5, средство 35 содержит:
средство 39, принимающее через линию 5A1 связи команду управления с маховика летательного аппарата, вручную приводимого в действие пилотом, и преобразующее такую команду посредством первой обычной кинематики;
средство 40, принимающее через линию 5A2 связи команду управления, сформированную тягой руля направления летательного аппарата, вручную приводимой в действие пилотом, и преобразующее такую команду управления посредством второй обычной кинематики;
средства 41, 42 и 43, каждое из которых определяет весовой коэффициент, зависящий от скорости относительно земли, принятой через линию 6A связи;
средство 44 взвешивания результатов обработок, реализованных средством 39, весовым коэффициентом из средства 41;
средство 45 взвешивания результатов обработок, реализованных средством 40, весовым коэффициентом из средства 42;
средство 46 взвешивания команды управления, принятой из системы 10 автопилота через линию 5B связи, весовым коэффициентом, сформированным средством 43;
средство 47 суммирования информации из средств 44, 45 и 46, соответственно; и
средство 48 ограничения суммы из средства 47, при этом средство 48 выдает на своем выходе угол β ориентации, передаваемый по линии 37 связи в средство 36.
В этом первом варианте осуществления угол β ориентации переднего колеса рассчитывается по прямому закону, это означает, что угол β является прямой функцией (без обратной связи) команд с органов 9 управления (например, маховика, тяги руля направления, будущих органов) и/или из системы 10 автопилота. С этим первым вариантом осуществления получается команда β, являющаяся функцией, линейной или нет, команд из средства 2.
Более того, во втором варианте осуществления (не показан) угол β получается в результате закона подстройки отклонения от курса, обеспечивающего возможность управления углом β, так что летательный аппарат имеет скорость отклонения от курса, являющуюся функцией команд с органов 9 управления (например, маховика, тяги руля направления, будущих органов) и/или из системы 10 автопилота. Такая подстройка скорости отклонения от курса на земле более точно описана в патенте Франции № 2,854,962.
Кроме того, средство 36 рассчитывает посредством угла β ориентации, принятого из средства 35, эквивалентную кривую c, представляющую кривую траектории летательного аппарата, такой как была бы, если бы система 19 ориентации переднего колеса работала надлежащим образом, и если бы переднее колесо ориентировалось согласно углу β. Средство 36 рассчитывает такую кривую c через следующее выражение:
c=tg β/L,
где L - продольная колесная база летательного аппарата, которая является расстоянием между осью передних колес и точкой медианы основных шасси; и
tg - тангенс.
Кроме того, 38 содержит:
средство 50, присоединенное через линию 51 связи к средству 36 и сформированное для того, чтобы рассчитывать регулируемое давление P;
средство 52, присоединенное через линии 53 и 54 связи, соответственно, к средствам 36 и 50, и сформированное для того, чтобы определять промежуточные команды PsG и PsD давления, которые должны применяться, соответственно, слева (G) или справа (D); и
средство 55, присоединенное через линии 56A и 56B связи к средству 52, а также через линии 15A и 15B, являющиеся частью линии 15 связи, к средству 14 управления, и сформированное для того, чтобы определять команды PcG и PcD давления (левую и правую), которые должны соответственно применяться к тормозам, действующим на левую сторону, и к тормозам, действующим на правую сторону, летательного аппарата.
Средство 50 рассчитывает регулируемое давление P по кривой c, принятой из средства 36 через линию 51 связи, и по измеренным значениям, принятым из узла 3 через линию 6B связи (являющуюся частью линии 6A связи линии 6 связи на фиг.1). Такие измерения, в частности, относятся к скорости Vground относительно земли, состоянию тормозов, Gf, состоянию шин, Gpn и загрязнению взлетно-посадочной полосы, Gpi. Средство 50 рассчитывает, в качестве функции таких параметров, регулируемое давление P (всегда положительное или нулевое), являющееся таким, что, когда летательный аппарат замедляется на одной стороне тормозами, на которой прикладывается такое управляющее давление, траектория летательного аппарата показывает кривую, эквивалентную кривой c.
Для этого, на первом этапе, отыскивается функция f, равная кривой c, являющаяся такой, что:
c=f(P, Vground, Gf, Gpn, Gpi)
Несколько решений могло бы быть рассмотрено для определения такой функции f. Например, они включают в себя:
если модель летательного аппарата и взлетно-посадочной полосы известна с достаточной точностью, можно определить аналитическую зависимость, связывающую кривую c с параметрами P, Vground, Gf, Gpn, Gpi; и
из экспериментов (реальных или имитационно моделируемых) могло бы определяться, для некоторого количества значений каждого одного из параметров, вовлеченных в функцию f, значение кривой c траектории на земле летательного аппарата, например, в форме таблицы с несколькими записями или последовательности таблиц с несколькими записями.
Затем, на втором этапе, такая функция f инвертируется (является ли она аналитической или выражена в виде таблицы), с тем чтобы получать зависимость между регулируемым давлением P и, в частности, Vground, Gf, Gpn, Gpi:
P=f-1(c, Vground, Gf, Gpn, Gpi) и P≥0
Более того, функция средства 52 включает распределение регулируемого давления P, принятого из средства 50, на левое PsG) или правое (PsD), в качестве функции кривой c, поставляемой средством 36. Средство 52 реализует такое распределение на основании следующих соотношений:
- если c>0, PsG=P, и PsD=0;
- если c<0, PsG=0, и PsD=P; и
- если c=0, PsG=PsD=0
Более того, функция средства 55 включает этапы, состоящие из:
ограничения команд давления слева и справа, которые должны передаваться; и
прибавления, при необходимости, команд давления с тормозных педалей 14, так что пилот сохраняет способность тормозить летательный аппарат симметрично и вручную. Для этого средство 55 могло бы принимать, через линию 15A связи, команду PfG давления с левой тормозной педали, а через линию 15B связи, команду PfD давления правой тормозной педали, линии 15A и 15B связи являются частью линии 15 связи на фиг.1.
Команды (PsG, PsD) из средства 52 соответственно суммируются с командами (PfG, PfD) давления с тормозных педалей (обе всегда положительные или нулевые) на основании следующих соотношений:

Команды PiG и PiD из такого суммирования соответственно ограничиваются функциями, значение которых зависит от максимального давления, допустимого тормозами, Pmax, и командами PsG и PsD давления. (Окончательные) команды PcG и PcD (регулируемого) давления, слева и справа (обе всегда положительные или нулевые) (передаваемые, соответственно, по линиям 11A и 11B связи) получаются на основании следующих зависимостей:
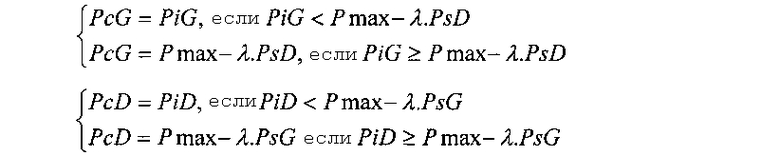 ,
,
где λ - весовой коэффициент, находящийся в диапазоне от 0 до 1. Более конкретно:
для λ, равного 0, продольное управление (уменьшает скорость благодаря максимальному торможению) является предпочтительнее поперечного управления (летательный аппарат больше не функционирует благодаря асимметричному торможению, если тормозные педали полностью нажаты);
для λ, равного 1, поперечное управление (полноправность скорости отклонения от курса) является предпочтительнее продольного управления (пилот больше не может тормозить летательный аппарат, например, поскольку маховик полностью повернут); и
промежуточное значение λ (находящееся в диапазоне от 0 до 1) обеспечивает возможность получения компромисса между насыщением исполнительных механизмов и поперечным управлением.
Изобретение относится к вычислительной технике, а именно к устройствам управления летательным аппаратом осуществляющим руление. Техническим результатом является предоставление летательному аппарату возможности управления на земле по перечной оси в случае потери управления передним колесом. Устройство поперечного управления летательным аппаратом, осуществляющим руление, содержит средство формирования команд управления, относящихся к управлению ориентацией переднего колеса; средство измерения текущей скорости относительно земли летательного аппарата; блок расчета; средство автоматического применения первых команд к узлам управления; систему контроля для автоматического контроля системы ориентации. Способ описывает работу данного устройства. 2 н. и 8 з.п. ф-лы, 5 ил.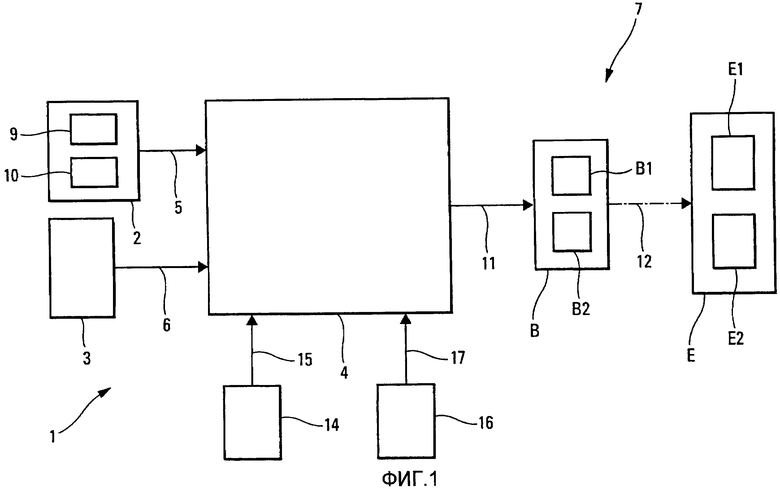
1. Способ поперечного управления летательным аппаратом, осуществляющим руление, снабженным ориентируемым передним колесом, включающий этапы на которых: формируют команды управления, относящиеся к управлению ориентацией переднего колеса средством (2) формирования команд; измеряют текущую скорость относительно земли летательного аппарата; и из команд управления, принятых на этапе а), и измеренной текущей скорости относительно земли, принятой на этапе b), автоматически определяют первые команды на этапе с) для по меньшей мере одного из следующих узлов управления летательного аппарата: набора тормозов (Е1) и набора двигателей (Е2), при этом каждый из узлов (E1, E2) управления выполнен с возможностью формирования поперечного перемещения летательного аппарата вокруг вертикальной оси посредством асимметричного действия, и применяют первые команды автоматически к узлам (E1, E2) управления на последующем этапе d), отличающийся тем, что автоматически контролируют систему (19) ориентации, предназначенную для ориентации переднего колеса, для определения поломки такой системы (19) ориентации; автоматически вырабатывают команды управления посредством средства (2) формирования команд для системы (19) ориентации переднего колеса и не выполняют этапы a)-d) до тех пор, пока поломка не была определена; и автоматически выполняют этапы a)-d) для формирования на летательном аппарате поперечного перемещения, по существу, идентичного поперечному перемещению, которое было бы сформировано применением команд управления к переднему колесу, и не применяют команды управления к системе ориентации (19) переднего колеса, как только определена поломка.
2. Способ по п.1, отличающийся тем, что на этапе с): c1) рассчитывают угол ориентации переднего колеса, представляющий команды управления; с2) рассчитывают текущую кривую траектории летательного аппарата, такую, как она была бы, если бы переднее колесо было ориентировано согласно углу ориентации; и с3) рассчитывают первые команды из, по меньшей мере, текущей кривой и текущей скорости относительно земли.
3. Способ по п.2, отличающийся тем, что на этапе с2) рассчитывают текущую кривую посредством следующего выражения:
c=tgβ/L,
где β - угол ориентации переднего колеса, рассчитанный на этапе c1);
L - продольная колесная база летательного аппарата; и
tg - тангенс.
4. Способ по п.2, отличающийся тем, что на этапе с3):
рассчитывают регулируемое давление из текущей кривой и измеренной текущей скорости относительно земли; определяют промежуточные команды PsG и PsD давления, которые должны применяться соответственно слева и справа из текущей кривой и регулируемого давления; рассчитывают команды PcG и PcD давления, представляющие первые команды для набора тормозов (Е1), и которые должны применяться соответственно к тормозам, действующим по левую сторону, и к тормозам, действующим по правую сторону летательного аппарата, из таких промежуточных команд PsG и PsD давления, причем команды PcG и PcD давления рассчитывают посредством следующих зависимостей:
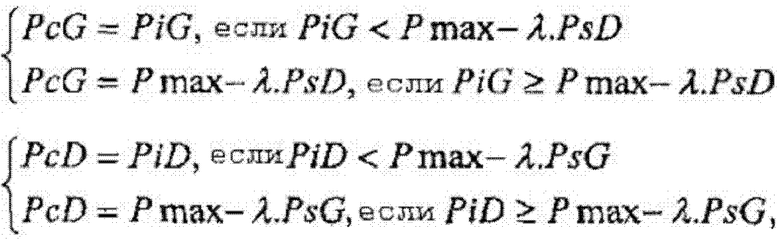
где λ - весовой коэффициент;
Рmах - максимальное давление, допустимое тормозами;
PiG - команда давления, полученная суммированием промежуточной команды PsG давления и команды давления левой тормозной педали; и
PiD - команда давления, полученная суммированием промежуточной команды PsD давления и команды давления правой тормозной педали.
5. Способ по п.1, отличающийся тем, что принимают общую команду управления для управления моментом поворота летательного аппарата, осуществляющего руление; автоматически раскладывают такую общую команду на команды управления, относящиеся к управлению ориентацией переднего колеса, и на вспомогательные команды; выполняют этапы a)-d) для команд управления; и автоматически применяют вспомогательные команды к вспомогательному средству (33), выполненному с возможностью воздействия на поперечное перемещение летательного аппарата.
6. Способ по п.1, отличающийся тем, что дополнительно принимают вторые команды для управления узлом управления; определяют общие команды из таких вторых команд и первых команд; и на этапе d) применяют общие команды, полученные из первых и вторых команд, к узлу управления.
7. Способ по п.1, отличающийся тем, что на этапе d) перед применением первых команд к узлу управления ограничивают такие первые команды максимальными значениями, если они выше, чем последние.
8. Способ по п.1, отличающийся тем, что на этапе с) определяют первые команды, содержащие команды для набора тормозов (Е1) и команды для набора двигателей (Е2), и на этапе d) применяют такие команды соответственно к набору тормозов (Е1) и к набору двигателей (Е2).
9. Устройство поперечного управления летательным аппаратом, осуществляющим руление, снабженным ориентируемым передним колесом, при этом указанное устройство (1) содержит: средство (2) формирования команд управления, относящихся к управлению ориентацией переднего колеса; средство (3) измерения текущей скорости относительно земли летательного аппарата; и блок (4) расчета для автоматического определения, из команд управления и текущей скорости относительно земли, первых команд для по меньшей мере одного из следующих узлов управления: набора тормозов (Е1) летательного аппарата и набора двигателей (Е2) летательного аппарата, причем каждый из узлов (E1, E2) управления выполнен с возможностью формирования поперечного перемещения летательного аппарата вокруг вертикальной оси посредством асимметричного действия; и средство (7) автоматического применения первых команд к узлам (E1, E2) управления, отличающееся тем, что оно дополнительно содержит систему (23) контроля для автоматического контроля системы (19) ориентации, выполненной с возможностью ориентации переднего колеса, для определения поломки такой системы (19) ориентации, при этом указанное устройство (1) выполнено так, что: до тех пор, пока поломка не определена системой (23) контроля, указанное устройство (1) автоматически применяет команды управления, выработанные средством (2) формирования команд, к переднему колесу посредством системы (19) ориентации, а приведение в действие блока (4) расчета запрещается; и как только поломка определена системой (23) контроля, указанное устройство (1) осуществляет поперечное управление посредством блока (4) расчета для формирования на летательном аппарате поперечного перемещения, по существу, идентичного поперечному перемещению, которое было бы сформировано применением команд управления к переднему колесу, а система (19) ориентации больше не применяет команды управления, сформированные указанным средством (2), к переднему колесу.
10. Устройство по п.9, отличающееся тем, что блок (4) расчета содержит: средство (35) для расчета угла ориентации переднего колеса, представляющего команды управления; средство (36) для расчета текущей кривой траектории летательного аппарата, какой она была бы, если бы переднее колесо было ориентировано согласно такому углу ориентации; и средство (38) для расчета первых команд из по меньшей мере текущей кривой и измеренной текущей скорости относительно земли.
| FR 2898334 А1, 14.09.2007 | |||
| Способ изготовления строительных панелей из полимерных композиционных материалов | 1987 |
|
SU1477872A1 |
| US 4482961, 13.11.1984 | |||
| БАЛАНСИРНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1992 |
|
RU2089462C1 |

