Настоящее изобретение относится к электрической системе управления для руля направления летательного аппарата, в частности, транспортного летательного аппарата.
Известно, что для того, чтобы улучшить летные качества (потребление топлива, уровень шума и т.п.) летательного аппарата без снижения транспортируемой нагрузки, производители имеют обыкновение по мере возможности снижать массу летательного аппарата, то есть массу конструкции, элементов, оборудования и т.п. упомянутого летательного аппарата.
Соответственно, может быть полезным уменьшать массу стабилизирующих элементов, таких как киль (то есть, неподвижная плоскость вертикального хвостового оперения летательного аппарата), которые предназначены для обеспечения устойчивости полета на маршруте летательного аппарата и которые содержат руль направления (то есть подвижный закрылок, который установлен на киле и который является легко управляемым с целью изменения направления летательного аппарата). Обычно, руль направления устанавливают с возможностью поворота вокруг оси, с тем, чтобы быть способным принимать любое угловое положение отклонения внутри диапазона перемещения, который ограничен первым и вторым пределами перемещения (или первым и вторым упорами).
Известно, что размеры стабилизирующего элемента летательного аппарата определяются, учитывая максимальные нагрузки, которым он должен подвергаться во время различных режимов полета этого летательного аппарата. Следовательно, для того, чтобы ограничить массу такого стабилизирующего элемента, а отсюда также и массу летательного аппарата, одно из решений состоит в том, чтобы снижать нагрузку, которой этот стабилизирующий элемент должен подвергаться в ходе полета.
Соответственно, документ FR-2809373 от заявителя раскрывает электрическую систему управления для руля направления летательного аппарата, в силу которой можно ограничивать боковые нагрузки, прикладываемые к упомянутому рулю направления во время маневров, и, отсюда, уменьшать задание размеров и массу последнего, однако, не снижая летные качества и безопасность полетов летательного аппарата.
Чтобы делать это, упомянутая система управления содержит:
- ножное управление, приводимое в действие пилотом и связанное с измерительным преобразователем, подающим электрическую команду пилотирования, представляющую воздействие пилота на упомянутое ножное управление;
- исполнительный механизм, принимающий команду управления, полученную из упомянутой команды пилотирования, и перемещающий упомянутый руль направления вокруг ее оси поворота; и
- между упомянутым ножным управлением и упомянутым исполнительным механизмом находится средство фильтрации нижних частот, принимающее упомянутую команду пилотирования из упомянутого измерительного преобразователя и разрабатывающее упомянутую команду управления для упомянутого исполнительного механизма, постоянная времени упомянутого средства фильтрации является предельно большой, в то время как амплитуда упомянутой команды пилотирования соответствует большей доле максимального значения перемещения руля направления.
Таким образом, данная известная нам система управления привносит в команды пилотирования на ножное управление нелинейную фильтрацию, которая зависит от перемещения, имеющегося в распоряжении для руля направления, эта фильтрация является предельно большой, по мере приближения руля направления к упорам, ограничивающим максимальное перемещение, тем самым ограничивая нагрузки, прикладываемые к упомянутому рулю управления, и, отсюда, давая возможность уменьшать задание размеров и массу последнего.
Однако настройка упомянутой фильтрации является идентичной по всей области полетного режима летательного аппарата, упомянутая фильтрация зависит от условий, имеющих отношение к команде отклонения руля, но не зависит от условий полета летательного аппарата.
С другой стороны, документ FR-2844251 от заявителя раскрывает электрическую систему управления для руля, которая дает возможность ограничивать максимальную нагрузку, которой подвергается стабилизирующий элемент (такой как киль) при любых условиях полета и маневрах летательного аппарата.
Однако такая стандартная система управления не дает возможность извлекать пользу из наилучших летных качеств руля направления при всех условиях смещения летательного аппарата и, в частности, при рулении по земле, особенно с сильным боковым ветром, вызывающим значительное боковое скольжение. Более точно, в такой ситуации руль направления должен направлять летательный аппарат не только в соответствии с командой управления, заданной пилотом посредством ножного управления, но также против этого бокового ветра. Отсюда, вследствие пределов перемещения (левого и правого) руля направления, в такой ситуации может оказаться, что руль направления доведен до одного из этих пределов перемещения, но не способен полностью выполнить свои задачи (относительно управления направлением летательного аппарата). Этот предел перемещения из диапазона перемещения достигнутый таким образом, слишком низок, а потому, в этой ситуации, ограничивает управление направлением летательного аппарата, наряду с тем, что другой предел перемещения никогда не достигается.
Следовательно, стандартная система управления, такая как вышеупомянутая, не дает возможность всегда направлять летательный аппарат требуемым образом, при всех условиях смещения, в частности, благодаря сильному боковому ветру у земли.
Настоящее изобретение относится к электрической системе управления для руля направления летательного аппарата, которая дает возможность исправить вышеупомянутые недостатки.
Для этой цели согласно изобретению система упомянутого типа содержит упомянутый руль направления, который установлен с возможностью поворота вокруг оси, с тем, чтобы быть способным принимать любое угловое положение отклонения внутри диапазона перемещения, который ограничен первым и вторым пределами перемещения;
- ножное управление, которое способно приводиться в действие пилотом летательного аппарата и которое связано с измерительным преобразователем, который подает команду пилотирования, представляющую воздействие пилота на упомянутое ножное управление;
- первое средство, которое определяет, на основе упомянутой команды пилотирования, учитывая упомянутые первый и второй пределы перемещения, команду отклонения, дающую возможность приводить упомянутый руль направления в положение, находящееся между упомянутым первым и вторым пределами перемещения и зависящее от упомянутой команды пилотирования; и
- исполнительный механизм, который принимает эту команду отклонения и который смещает упомянутый руль направления вокруг упомянутой оси в зависимости от упомянутой принимаемой команды отклонения, она примечательна тем, что дополнительно содержит:
- набор источников информации, способных генерировать, соответственно, текущие значения параметров полета, имеющие отношение к летательному аппарату; и
- второе средство для изменения упомянутых первого и второго пределов перемещения, делающее это, по меньшей мере частично, несимметричным образом, в зависимости от текущих значений упомянутых параметров полета, перед передачей этих первого и второго пределов перемещения в упомянутое первое средство.
Таким образом, в силу изобретения, упомянутые первый и второй пределы перемещения созданы для изменения, делая это, по меньшей мере частично, несимметричным образом, в зависимости от текущих значений упомянутых параметров полета, которые представляют условия смещения летательного аппарата (как детально изложено ниже). Следовательно, можно адаптировать диапазон перемещения руля направления (и, таким образом, эффективность последнего) к упомянутым реальным условиям смещения.
Хотя это и не исключительно, система управления в соответствии с настоящим изобретением, в частности, имеет преимущество при рулении летательного аппарата по земле и при сильном боковом ветре. В этом случае упомянутая система управления может быть сконструирована таким образом, чтобы больше смещать один из пределов перемещения (а именно тот, который находится на стороне, предоставляющей рулю направления возможность оказывать сопротивление упомянутому боковому ветру) для увеличения диапазона перемещения руля направления в большей степени на стороне этого предела перемещения, по сравнению с другой стороной, тем самым давая возможность повышать эффективность путевого управления летательного аппарата в этой ситуации и ограничивать нагрузки на другую сторону.
В конкретном варианте осуществления упомянутый набор источников информации содержит, по меньшей мере, некоторые из следующих средств:
- средство для определения фазы смещения летательного аппарата;
- средство для определения скорости летательного аппарата;
- средство для определения числа Маха летательного аппарата;
- средство для определения абсолютной высоты полета летательного аппарата;
- средство для определения аэродинамической конфигурации летательного аппарата;
- средство для определения угла бокового скольжения летательного аппарата;
- средство для определения реактивной тяги, создаваемой двигателями летательного аппарата;
- средство для определения взаимодействий между отклонениями различных поверхностей управления летательного аппарата; и
- средство для определения угловой скорости рыскания летательного аппарата.
Более того, преимущественно:
- упомянутое второе средство содержит базу данных, содержащую кривые изменений упомянутых первого и второго пределов перемещения в зависимости от значений упомянутых параметров полета; и/или
- упомянутые первое и второе средства образуют часть вычислительного узла.
Фигуры прилагаемых чертежей будут разъяснять способ, которым может быть выполнено изобретение. На этих фигурах, идентичные ссылки обозначают аналогичные элементы.
Фиг.1 - схематическое представление системы управления в соответствии с изобретением.
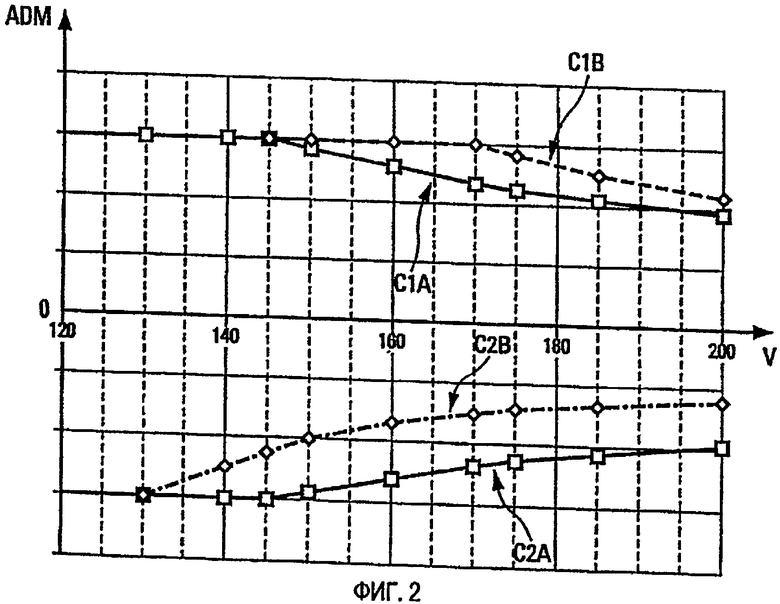
Фиг.2 - график, иллюстрирующий изменения пределов перемещения в диапазоне перемещения руля направления, при конкретных условиях смещения летательного аппарата.
Электрическая система 1 управления, в соответствии с настоящим изобретением, схематически представленная на фиг.1, предназначена для приведения в действие руля 2 направления летательного аппарата, который установлен с возможностью поворота в двух направлениях вокруг вертикальной оси Z-Z таким образом, который символически изображен двойной стрелкой 3. Упомянутый руль, поверхность 2 направления, может принимать любое угловое положение вокруг упомянутой оси Z-Z внутри диапазона перемещения, который тянется по ту или другую сторону аэродинамически нейтрального положения упомянутого руля 2 направления, и который ограничен первым пределом перемещения L1 и вторым пределом перемещения L2.
Упомянутая электрическая система 1 управления летательного аппарата, например транспортного летательного аппарата, принадлежит к упомянутому типу, содержащему:
- ножное управление 5, которое способно приводиться в действие пилотом летательного аппарата и которое связано с измерительным преобразователем 6, подающим электрическую команду управления (относящуюся к отклонению руля 2 направления), представляющую приведение в действие упомянутого ножного управления 5;
- вычислительное средство 7, которое присоединено посредством электрической цепи 8 к упомянутому измерительному преобразователю 6 и которое предназначено для определения на основе упомянутой принятой команды пилотирования, учитывая упомянутые первый и второй пределы перемещения, L1 и L2, команды отклонения, дающей возможность приводить упомянутый руль 2 направления в положение, находящееся между упомянутым первым и вторым пределами перемещения L1 и L2 и зависящее от упомянутой команды пилотирования; и
- стандартный исполнительный механизм 9, который принимает эту команду отклонения посредством электрической цепи 10 и который смещает упомянутый руль 2 направления вокруг упомянутой оси Z-Z в зависимости от упомянутой принимаемой команды отклонения.
Согласно изобретению упомянутая система 1, кроме того, содержит:
- набор 11 нижеперечисленных источников информации, которые способны генерировать, соответственно, текущие значения параметров полета. Эти параметры полета имеют отношение к летательному аппарату и представляют реальные условия смещения упомянутого летательного аппарата; и
- средство 12, которое присоединено посредством цепи 13 к упомянутому набору 11 и которое сформировано таким образом, чтобы:
- изменять упомянутые первый и второй пределы перемещения, L1 и L2, делая это, по меньшей мере частично, несимметричным образом, в зависимости от текущих значений упомянутых параметров полета, принятых из упомянутого набора 11 источников информации; и
- передавать новые значения пределов перемещения, L1 и L2, в упомянутое средство 7 посредством цепи 14, так что последнее использует их для определения команды отклонения, предназначенной для исполнительного механизма 9.
Таким образом, система 1 в соответствии с настоящим изобретением изменяет упомянутые первый и второй пределы перемещения L1 и L2, делая это, по меньшей мере частично, несимметричным образом, в зависимости от текущих значений параметров полета, которые представляют условия смещения летательного аппарата. Следовательно, упомянутая система 1 дает возможность адаптировать диапазон перемещения руля 2 направления (и, таким образом, эффективность последнего) к упомянутым реальным условиям смещения.
Хотя это и не исключительно, система 1 управления, в соответствии с настоящим, в частности, имеет преимущества при рулении летательного аппарата по земле при сильном боковом ветре. В этом случае упомянутая система 1 управления смещает один из пределов перемещения (а именно, тот, который находится на стороне, предоставляющей рулю 2 направления возможность оказывать сопротивление упомянутому боковому ветру) для увеличения диапазона перемещения руля 2 направления в большей степени на стороне этого предела перемещения, по сравнению с другой стороной, тем самым давая возможность повышать эффективность путевого управления летательного аппарата в этой ситуации и ограничивать нагрузки на другую сторону.
В конкретном варианте осуществления упомянутые средства 7 и 12 образуют часть вычислительного блока 15.
Более того, упомянутое средство 12 может содержать базу данных (не изображена), содержащую кривые С1 и С2 изменения упомянутых пределов перемещения, L1 и L2, в зависимости от текущих значений множества параметров полета.
В первом варианте осуществления упомянутые кривые изменения определены эмпирически, наряду с тем, что во втором варианте осуществления, упомянутые кривые изменения определены с помощью математических формул, в которых объединяются упомянутые текущие значения параметров полета.
Для пояснения на фиг.2 изображен угол максимального перемещения ADM (например, выраженный в градусах) относительно нейтрального положения, представляющий упомянутые пределы перемещения, L1 и L2, в зависимости от скорости V (выраженной в узлах, узел приблизительно равен 0,5 м/с) летательного аппарата и его угла β бокового скольжения. Более точно:
- кривые С1А и С2А иллюстрируют, соответственно, изменения упомянутых пределов перемещения, L1 и L2, в зависимости от скорости V, для незначительного угла β бокового скольжения. Эти кривые С1А и С2А изображены сплошными линиями и некоторые из их значений выделены квадратами; а
- кривые С1В и С2В иллюстрируют, соответственно, изменения упомянутых пределов перемещения, L1 и L2, в зависимости от скорости V, для значительно положительного угла β бокового скольжения. Эти кривые С1В и С2В изображены прерывистыми линиями и некоторые из их значений выделены ромбами.
Эта фиг.2 ясно подчеркивает возможности (по меньшей мере частичные) асимметричных изменений упомянутых пределов перемещения, L1 и L2, в зависимости от текущих значений параметров полета, в этом случае, скорости V и угла β бокового скольжения. Таким образом, кривые С1В и С2В изменения являются асимметричными. С другой стороны, кривые С1А и С2А изменения в своей части остаются симметричными.
Дополнительно, в конкретном варианте осуществления, упомянутый набор 11 источников информации содержит, по меньшей мере, некоторые из следующих стандартных средств:
- средство 16А для определения фазы смещения летательного аппарата. Это может быть фаза полета (фаза набора высоты, фаза крейсерского полета и т.п.) или фаза руления по земле, например, с намерением взлета, или после приземления;
- средство 16В для определения скорости летательного аппарата;
- средство 16С для определения числа Маха летательного аппарата;
- средство 16D для определения абсолютной высоты полета летательного аппарата;
- средство 16Е для определения аэродинамической конфигурации летательного аппарата;
- средство 16F для определения угла β бокового скольжения летательного аппарата. Этот угол β бокового скольжения, например, может измеряться на уровне центра тяжести летательного аппарата, на уровне киля или на уровне носовой части летательного аппарата;
- средство 16G для определения реактивной тяги, создаваемой двигателями летательного аппарата;
средство 16Н для определения взаимодействий между отклонениями различных поверхностей управления (хвостового оперения, рулей высоты, интерцепторов) летательного аппарата; и
- средство 16I для определения угловой скорости рыскания летательного аппарата.
В первом варианте, упомянутое средство 12 использует текущие значения некоторых из вышеупомянутых параметров полета (фазы смещения, скорости, числа Маха, абсолютной высоты полета, аэродинамической конфигурации, угла бокового скольжения, реактивной тяги, взаимодействий между отклонениями различных поверхностей управления, угловой скорости рыскания), наряду с тем, что во втором варианте упомянутое средство 12 использует текущие значения одновременно всех этих параметров полета.
Изобретение относится к электрической системе управления для руля направления летательного аппарата. Система содержит руль направления, который установлен с возможностью поворота вокруг оси, чтобы принимать любое угловое положение внутри диапазона, набор источников информации, способных генерировать текущие значения параметров полета, ножное управление, связанное с измерительным преобразователем, первое средство, которое определяет команду отклонения, исполнительный механизм, который принимает команду отклонения и смещает руль вокруг оси в зависимости от команды отклонения, второе средство для изменения первого и второго пределов перемещения в зависимости от текущих значений параметров полета. Система сконструирована таким образом, чтобы смещать один из пределов перемещения для увеличения диапазона перемещения руля направления в большей степени на стороне предела перемещения, тем самым давая возможность повышать эффективность управления летательного аппарата и ограничивать нагрузки на другую сторону. 2 н. и 3 з.п. ф-лы, 2 ил.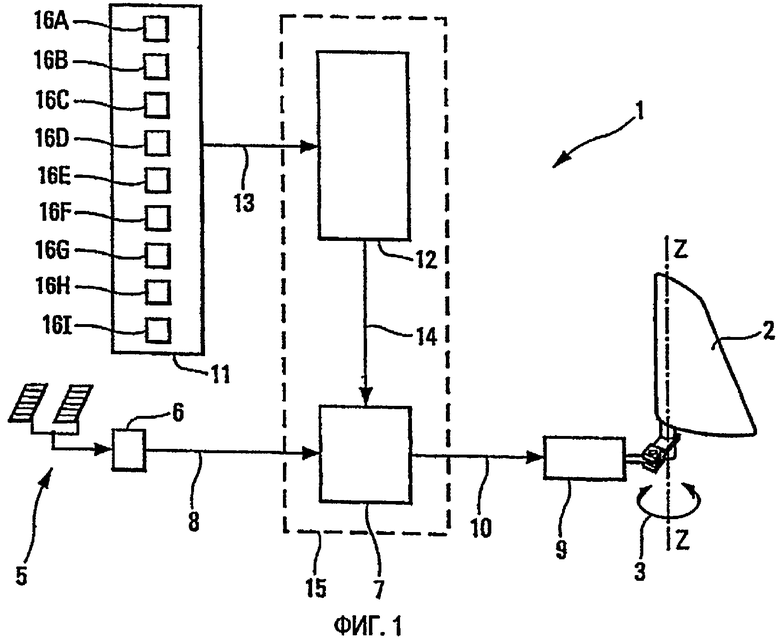
1. Электрическая система управления для руля направления летательного аппарата, упомянутая система (1) содержит руль (2) направления, который установлен с возможностью поворота вокруг оси (Z-Z), с тем, чтобы быть способным принимать любое угловое положение отклонения внутри диапазона перемещения, который ограничен первым и вторым пределами перемещения, набор (11) источников информации, способных генерировать, соответственно, текущие значения параметров полета, имеющие отношение к летательному аппарату, ножное управление (5), которое способно приводиться в действие пилотом летательного аппарата, и которое связано с измерительным преобразователем (6), который подает команду пилотирования, представляющую воздействие пилота на упомянутое ножное управление (5), первое средство (7), которое определяет на основе упомянутой команды пилотирования, учитывая упомянутые первый и второй пределы перемещения, команду отклонения, дающую возможность приводить упомянутый руль (2) направления в положение, находящееся между упомянутым первым и вторым пределами перемещения и зависящее от упомянутой команды пилотирования, и исполнительный механизм (9), который принимает эту команду отклонения, и который смещает упомянутый руль (2) направления вокруг упомянутой оси (Z-Z) в зависимости от упомянутой принимаемой команды отклонения, отличающаяся тем, что она, кроме того, содержит второе средство (12) для изменения в зависимости от текущих значений упомянутых параметров полета, которые представляют реальные условия смещения летательного аппарата, упомянутых первого и второго пределов перемещения, делая это, по меньшей мере частично, несимметричным образом, так, чтобы больше смещать один из этих пределов перемещения, с тем, чтобы увеличить диапазон перемещения руля направления больше на стороне этого предела перемещения, чем на другой стороне.
2. Система по п.1, в которой упомянутый набор (11) источников информации содержит, по меньшей мере, некоторые из следующих средств: средство (16А) для определения фазы смещения летательного аппарата, средство (16В) для определения скорости летательного аппарата, средство (16С) для определения числа Маха летательного аппарата, средство (16D) для определения абсолютной высоты полета летательного аппарата, средство (16Е) для определения аэродинамической конфигурации летательного аппарата, средство (16F) для определения угла бокового скольжения летательного аппарата, средство (16G) для определения реактивной тяги, создаваемой двигателями летательного аппарата, средство (16Н) для определения взаимодействий между отклонениями различных поверхностей управления летательного аппарата и средство (16I) для определения угловой скорости рыскания летательного аппарата.
3. Система по п.1, в которой упомянутое второе средство (12) содержит базу данных, содержащую кривые изменений упомянутых первого и второго пределов перемещения в зависимости от значений упомянутых параметров полета.
4. Система по п.1, в которой упомянутые первое и второе средства (7, 12) образуют часть вычислительного блока (15).
5. Летательный аппарат, при этом он содержит систему (1) управления, такую как по п.1.
| US 5170969 А, 15.12.1992 | |||
| ЕР 1396421 А, 10.03.2004 | |||
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072311C1 |

