Настоящее изобретение касается способа и устройства, позволяющих применять реверсоры тяги летательного аппарата, а также касается летательного аппарата, оборудованного таким устройством.
Известно, что гражданские летательные аппараты, содержащие турбореактивные двигатели, оборудованы реверсорами тяги, позволяющими улучшить торможение, значительно сокращая расстояние движения по земле во время приземления или при прерывании взлета. Реверсоры тяги связаны с двигателями летательных аппаратов и выполнены с возможностью управления для перехода из нерабочего убранного положения в рабочее развернутое положение и, наоборот, из упомянутого рабочего развернутого положения в упомянутое нерабочее убранное положение. После выбора соответствующего режима двигателей пилот может вручную привести в действие развертывание реверсоров тяги, связанных с этими двигателями, при помощи органов управления типа рычага.
Однако реверсоры тяги представляют риск случайного развертывания во время полета, например, после непроизвольного действия пилота на один из органов управления. Кроме того, плохое позиционирование рычага газа одного из двигателей при развернутом положении реверсоров тяги всех двигателей или ошибочный контроль тяги двигателей при неисправности реверсора тяги одного из двигателей может привести к асимметрии общей тяги двигателей и создать трудности в управлении летательным аппаратом на земле. Кроме того, длительный промежуток времени для принятия решения пилотом между касанием колесами летательного аппарата земли и развертыванием реверсоров тяги пилотом снижает вклад реверсоров тяги в торможение летательного аппарата и может привести к сходу с полосы.
Настоящее изобретение призвано устранить эти недостатки.
В этой связи объектом изобретения является способ применения реверсоров тяги во время приземления или взлета летательного аппарата, оборудованного, по меньшей мере, двумя турбинными двигателями с индивидуальным управлением режимами в диапазоне между режимом малого газа и режимом полного газа при помощи рычагов газа, соответственно связанных с упомянутыми двигателями, при этом реверсорами тяги управляют при помощи, по меньшей мере, одного органа управления для перехода из нерабочего убранного положения в рабочее развернутое положение и, наоборот, из рабочего развернутого положения в нерабочее убранное положение, отличающийся тем, что следующие последовательные этапы осуществляются автоматически:
а) развертывание предварительно включенных упомянутых реверсоров тяги, когда:
- режим упомянутых двигателей, самое большее, равен заранее определенному нижнему порогу режима;
- скорость летательного аппарата превышает заранее определенный первый порог скорости; и
- отмечен контакт летательного аппарата с землей;
b) применение для упомянутых двигателей заранее определенного режима, по меньшей мере, равного упомянутому нижнему порогу, пока скорость летательного аппарата превышает упомянутый первый порог скорости;
с) как только скорость упомянутого летательного аппарата, самое большее, равна упомянутому первому порогу скорости, снижение режима упомянутых двигателей таким образом, чтобы они достигли режима двигателя, самое большее, равного упомянутому нижнему порогу режима;
d) затем убирание упомянутых реверсоров тяги.
Таким образом, благодаря изобретению, происходит автоматическое применение реверсоров тяги, что позволяет ограничить и даже исключить вмешательство пилота или пилотов во время применения реверсоров. За счет этого существенно снижается риск человеческих ошибок (несвоевременное развертывание/убирание реверсоров тяги, неправильное регулирование тяги двигателей и т.д.) во время такого применения.
Кроме того, время между касанием колесами земли и развертыванием реверсоров тяги сводится к нулю или почти к нулю, что позволяет существенно сократить расстояние торможения летательного аппарата и, следовательно, уменьшить риск его схода с полосы.
Предпочтительно убирание упомянутых реверсоров тяги происходит, когда скорость упомянутого летательного аппарата, самое большее, равна заранее определенному второму порогу скорости, при этом упомянутый второй порог скорости ниже упомянутого первого порога скорости.
Кроме того, упомянутые реверсоры тяги включаются, если соблюдены следующие условия:
- пилот выбрал реверсивную тягу, соответствующую упомянутому заранее определенному режиму, применяемому для двигателей на этапе b);
- пилот установил орган управления упомянутыми реверсорами тяги в заранее определенное положение, называемое автоматическим положением;
- летательный аппарат находится в одной из двух следующих конфигураций:
• в конфигурации захода на посадку перед приземлением;
• в конфигурации взлета.
Предпочтительно в случае неисправности, по меньшей мере, одного из упомянутых реверсоров тяги для каждого из упомянутых двигателей определяют новый режим для применения на этапе b).
Таким образом, обеспечивают контроль над асимметрией реверсивной тяги, создаваемой неисправным реверсором тяги, и управляемость летательного аппарата улучшается.
В варианте, в случае приземления, реверсоры тяги включаются, если соблюдены следующие условия:
- пилот зарегистрировал параметры приземления;
- пилот установил орган управления упомянутыми реверсорами тяги в заранее определенное положение, называемое автоматическим положением;
- летательный аппарат находится в конфигурации захода на посадку;
и упомянутый режим для применения к двигателям на этапе b) определяют в зависимости от упомянутых зарегистрированных параметров и от реальных условий приземления таким образом, чтобы он был оптимальным.
Таким образом, если пилот запрограммировал требуемую рулежную дорожку выхода с полосы, режим, применяемый для двигателей во время этапа b), определяется автоматически в зависимости от момента касания колесами полосы по отношению к запрограммированной рулежной дорожке выхода таким образом, чтобы скорректировать торможение летательного аппарата.
Предпочтительно перед осуществлением этапа b) происходит автоматическая проверка правильного развертывания упомянутых реверсоров тяги.
Кроме того, при помощи намеренного действия пилота, по меньшей мере, на одно из следующих средств:
- орган управления упомянутыми реверсорами тяги;
- рычаг газа, связанный с одним из упомянутых двигателей;
приостанавливают, по меньшей мере, один из этапов а), b), с).
Таким образом, пилот имеет возможность прекратить автоматическое применение реверсоров тяги и продолжить реверсирование тяги вручную.
Предпочтительно упомянутый заранее определенный нижний порог режима, по меньшей мере, приблизительно равен режиму малого газа.
Для осуществления способа в соответствии с настоящим изобретением предпочтительно предусматривают устройство управления, которое содержит:
- логическое устройство развертывания, позволяющее управлять упомянутым развертыванием реверсоров тяги;
- логические устройства применения режима, каждое из которых позволяет управлять упомянутым применением заранее определенного режима для одного из упомянутых двигателей;
- логические устройства снижения режима, каждое из которых позволяет управлять упомянутым снижением режима одного из упомянутых двигателей; и
- логические устройства убирания, каждое из которых позволяет управлять упомянутым убиранием реверсора тяги одного из упомянутых двигателей.
Кроме того, устройство управления содержит логическое устройство возврата положения, позволяющее производить упомянутую проверку правильного развертывания упомянутых реверсоров тяги.
Кроме того, устройство управления соединено через линию связи, по меньшей мере, с одним из следующих средств упомянутого летательного аппарата:
- с приводами управления самолетом;
- с приводами шасси;
- с приборами полетных данных;
- с устройством управления газом;
- с органом управления упомянутыми реверсорами тяги;
таким образом, чтобы принимать сигналы, представляющие данные, способные быть используемыми упомянутыми логическими устройствами развертывания, применения режима, снижения режима, убирания и возврата положения.
Предпочтительно устройство управления соединено через линию связи с интерфейсом управления, связанным с электронным управлением упомянутыми двигателями и с блоком управления упомянутыми реверсорами тяги, таким образом, чтобы принимать от упомянутого интерфейса управления сигналы данных, способных быть используемыми упомянутыми логическими устройствами применения режима, снижения режима, убирания и возврата положения и передавать ему сигналы управления соответственно от упомянутых двигателей и от упомянутых реверсоров тяги.
Кроме того, объектом настоящего изобретения является летательный аппарат, оборудованный описанным выше устройством управления.
Выполнение изобретения будет более очевидно при рассмотрении фигур прилагаемых чертежей. На этих фигурах эквивалентные элементы обозначены одинаковыми позициями.
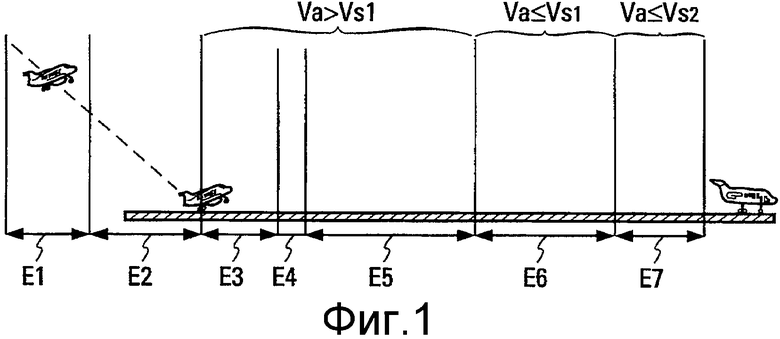
Фиг.1 - основные этапы способа автоматического применения реверсоров тяги в соответствии с настоящим изобретением во время приземления летательного аппарата.
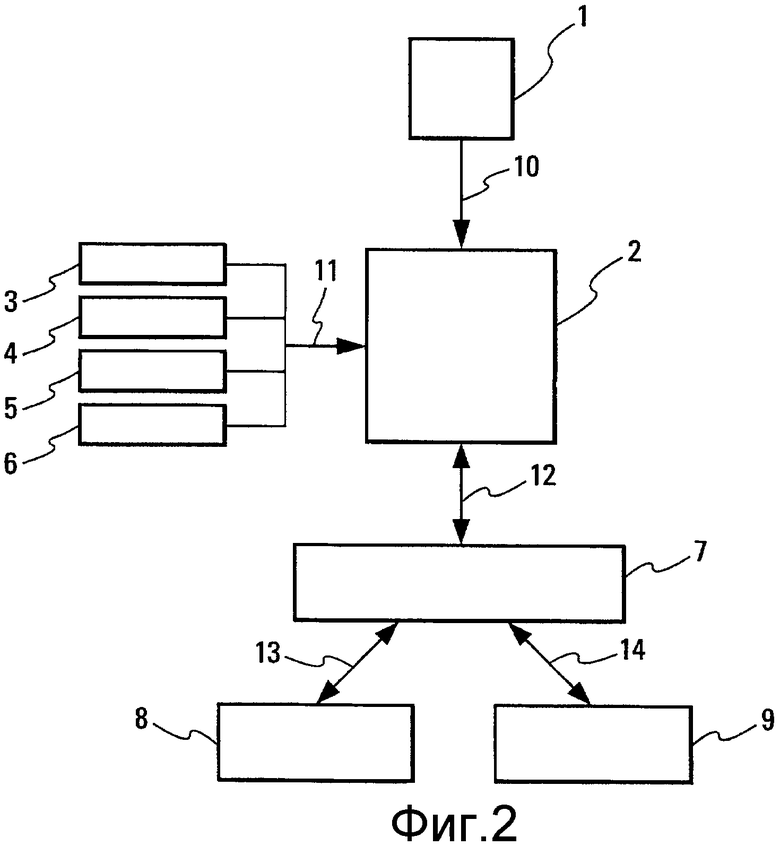
Фиг.2 - схематичный упрощенный вид архитектуры системы, позволяющей автоматически применять реверсоры тяги в соответствии с настоящим изобретением.
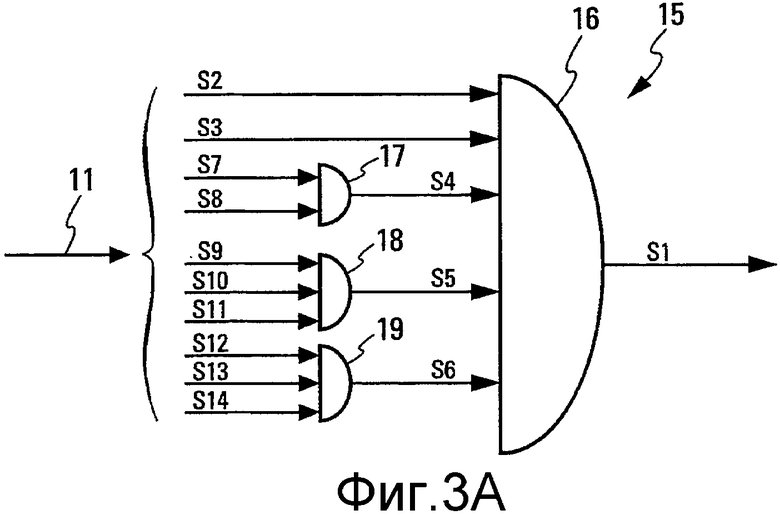
Фиг.3А - структурная схема логического устройства развертывания, интегрированного в устройство управления в соответствии с настоящим изобретением.
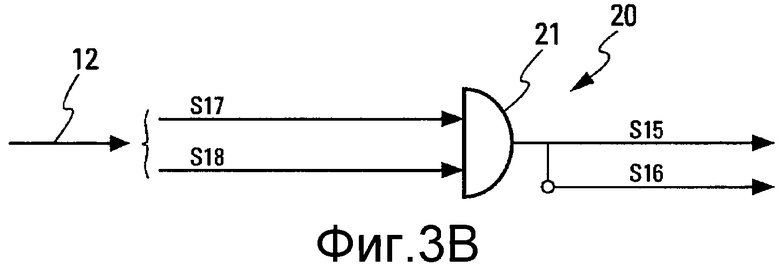
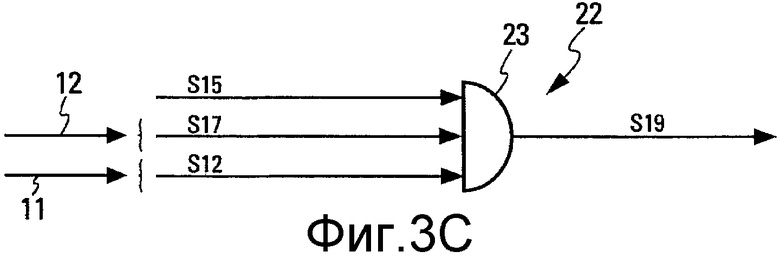
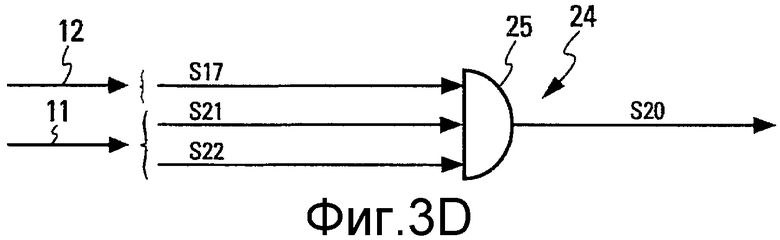
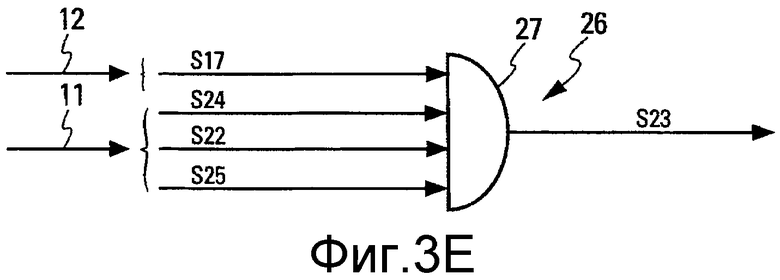
Фиг.3В - 3Е, аналогичные фиг.3А, иллюстрируют соответственно логические устройства возврата положения, применения режима, снижения режима и убирания, входящие в состав устройства управления в соответствии с настоящим изобретением.
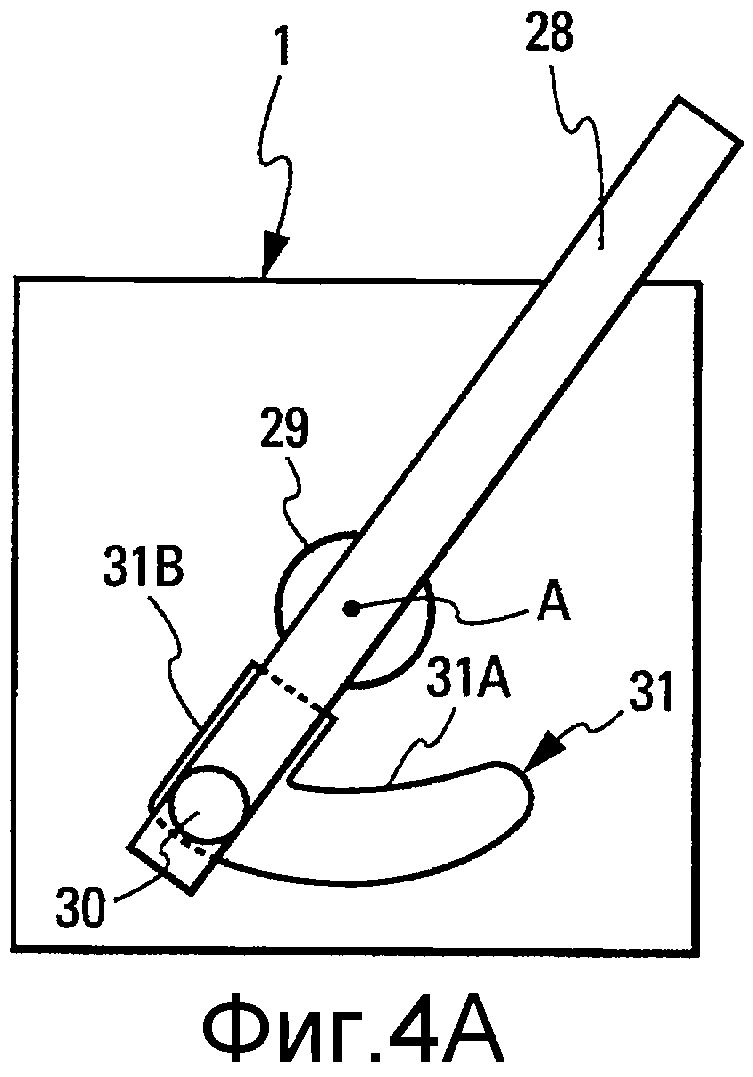
Фиг.4А - схематичный вид в поперечном разрезе органа управления, применяемого в соответствии с настоящим изобретением, когда он занимает убранное положение.
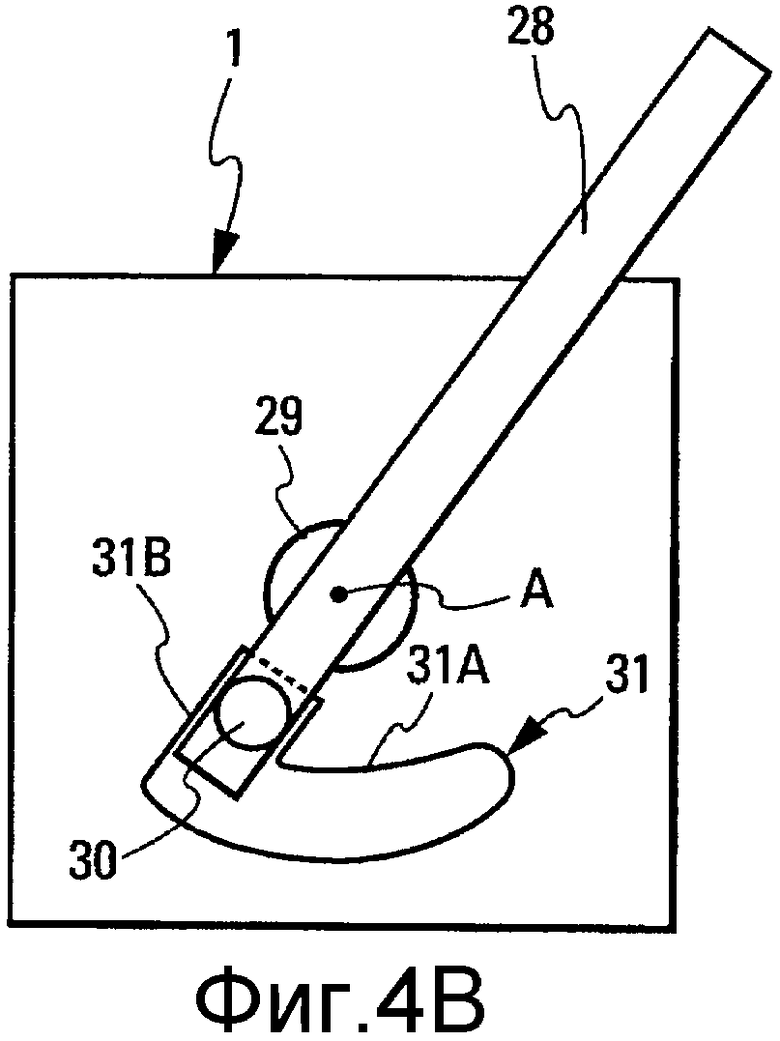
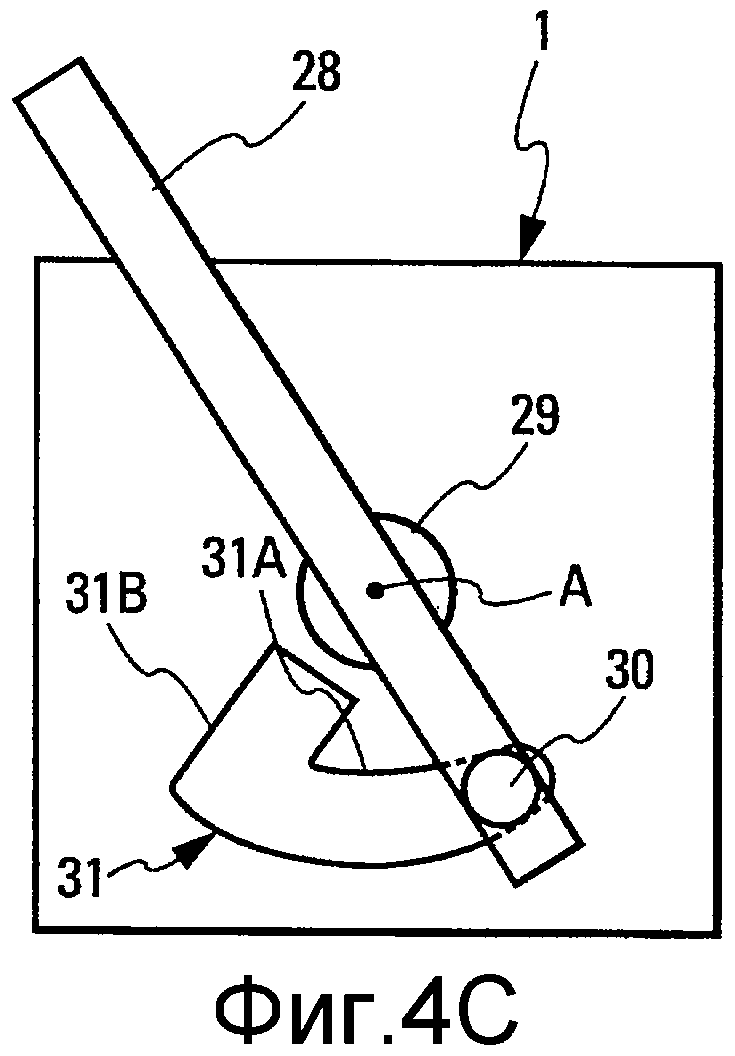
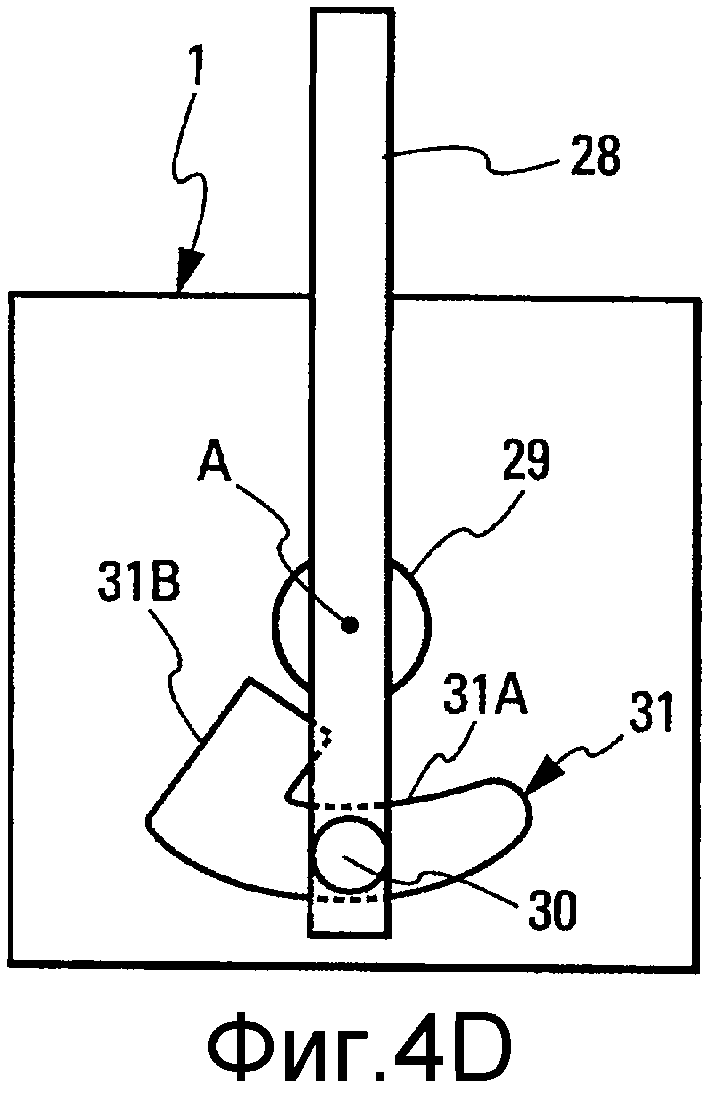
Фиг.4В, 4С и 4D - вид, аналогичный фиг.4А, когда орган управления занимает соответственно автоматическое положение, положение полного хода и положение середины хода.
Хотя в описанном ниже примере выполнения изобретения летательный аппарат является двухмоторным летательным аппаратом, оборудованным реверсорами тяги, понятно, что систему в соответствии с настоящим изобретением можно также установить на реверсоре тяги, оборудованном устройством изменения сечения сопла двигателя.
Режимом каждого из двигателей управляют индивидуально в диапазоне между режимом малого газа и режимом полного газа при помощи рычагов газа, связанных соответственно с упомянутыми двигателями и приводимых в действие пилотом или пилотами.
В предпочтительном варианте выполнения реверсорами тяги управляют при помощи только одного органа 1 управления, пример выполнения которого схематично показан в различных положениях на фиг.4А-4D, которые будут описаны ниже.
Как показано на фиг.1, автоматическое применение реверсоров тяги в соответствии с настоящим изобретением, называемое автоматическим режимом, происходит следующим образом.
Сначала предположим, что летательный аппарат находится в фазе захода на полосу, то есть находится в конфигурации захода на посадку. Его воздушные тормоза и автоматические тормоза включены, и его реверсоры тяги находятся в нерабочем убранном положении. Орган 1 управления занимает заранее определенное положение (фиг.4А), называемое убранным положением. Автоматический режим не включен.
Прежде всего, во время этой фазы захода на посадку, при помощи системы управления полетом, известной в авиационной области под аббревиатурой FMS (от английского Flight Management System), пилот выбирает (этап Е1) тягу, которую ему необходимо получить на выходе реверсоров тяги, когда они будут в рабочем развернутом положении. В примере выполнения пилот может выбрать уровень реверсивной тяги из трех уровней (например, минимального, промежуточного, максимального), каждый из которых соответствует заранее определенному режиму двигателя (например, режиму малого газа, промежуточному режиму, максимально допустимому режиму). Для осуществления выбора реверсивной тяги пилот может, например, принимать в расчет метеорологические условия и характеристики полосы (например, программируемую рулежную дорожку выхода с полосы).
Выбрав реверсивную тягу (этап Е1), пилот активирует автоматический режим (этап Е2), переведя орган 1 управления в автоматическое положение (фиг.4В). При этом подключаются реверсоры тяги. Чтобы деактивировать автоматический режим перед касанием колесами земли, пилот может, например, вернуть орган 1 управления в убранное положение.
При касании колесами земли, когда скорость Va летательного аппарата предпочтительно превышает первый порог заранее определенной скорости Vs1 (например, установленный в значении 70 узлов) и двигатели находятся в режиме малого газа (то есть их режим работы, самое большее, равен заранее определенному нижнему порогу режима), подается команда на развертывание реверсоров тяги (этап Е3).
После этого производят проверку безаварийного развертывания реверсоров тяги (этап Е4). В случае правильного развертывания реверсоров тяги пилот получает сигнал подтверждения развертывания реверсоров тяги, например, в виде визуального и/или звукового сигнала. В случае ненормального развертывания, по меньшей мере, одного из реверсоров тяги летательного аппарата пилот получает сигнал неправильного развертывания.
Если развертывание реверсоров тяги произошло нормально, подается команда на применение заранее определенного режима двигателей (этап Е5), при этом упомянутый заранее определенный режим соответствует уровню реверсивной тяги, выбранной пилотом на этапе Е1. Во время этапа Е5 режим двигателей поддерживается по существу равным заранее определенному режиму двигателя, пока скорость летательного аппарата остается выше, например, первого порога скорости.
Следует отметить, что, если развертывание, по меньшей мере, одного из реверсоров тяги произошло неправильно, на этапе Е5 определяют, например, для каждого двигателя (включая двигатель с неисправным реверсором тяги) новый режим двигателя, чтобы контролировать асимметрию реверсивной тяги, возникшую из-за неисправности реверсора, и улучшить контролируемость летательного аппарата. Новые режимы двигателя, соответствующие каждому из двигателей, можно применить, как и в случае правильного развертывания реверсоров тяги, пока скорость летательного аппарата остается выше первого порога скорости.
Как только скорость летательного аппарата становится, самое большее, равной упомянутому первому порогу скорости, подается команда на перевод двигателей в режим малого газа (этап Е6).
Когда двигатели достигают режима малого газа (в этом случае режим двигателей, самое большее, равен нижнему порогу режима) и скорость летательного аппарата, самое большее, равна заранее определенному второму порогу скорости Vs2 (например, второй порог скорости взят равным 20 узлам), подается команда на убирание реверсоров тяги летательного аппарата (этап Е7).
Автоматическое применение реверсоров тяги в соответствии с настоящим изобретением завершается, когда реверсоры тяги двигателей оказываются в нерабочем убранном положении.
При прерывании взлета, поскольку летательный аппарат первоначально находится в конфигурации взлета, автоматические применение реверсоров тяги содержит, аналогично автоматическому применению во время приземления, вышеупомянутые этапы Е1-Е7. Вместе с тем, следует отметить, что этапы выбора реверсивной тяги Е1 и активации автоматического режима Е2 предпочтительно осуществляют до того, как начинается фаза взлета летательного аппарата, и что этап Е3 развертывания реверсоров тяги может сработать при резком переводе двигателей пилотом в режим малого газа.
Кроме того, во время приземления или прерывания взлета летательного аппарата после намеренного действия пилота на орган 1 управления (например, при переводе органа управления в заранее определенное положение, называемое положением середины хода, которое будет описано ниже со ссылками на фиг.4D) или на рычаги газа, один из этапов Е3-Е7 может быть прерван, чтобы вернуться к ручному применению реверсоров тяги. В этом случае автоматический режим оказывается деактивированным, и пилот может, например, управлять поддержанием реверсивной тяги на выходе реверсоров ниже первого порога скорости.
В варианте примера выполнения в соответствии с настоящим изобретением пилот может запрограммировать на этапе Е1 требуемую рулежную дорожку выхода с полосы таким образом, чтобы выбор оптимального уровня реверсивной тяги происходил автоматически во время этапа Е3 в зависимости от реальных условий приземления (например, от положения касания колесами полосы по отношению к запрограммированной рулежной дорожки выхода, от метеорологических условий и т.д.) и чтобы применять соответствующий режим двигателя, пока скорость летательного аппарата остается, например, выше первого порога скорости.
В предпочтительном варианте выполнения изобретения пилот может также управлять вручную при помощи органа 1 управления развертыванием и убиранием реверсоров тяги, а также режимом двигателей, когда реверсоры тяги находятся в рабочем развернутом положении.
Согласно изобретению, это ручное применение реверсоров тяги, называемое ручным режимом, осуществляют следующим образом.
Предположим сначала, что летательный аппарат находится в фазе захода на полосу и в конфигурации захода на посадку. Его воздушные тормоза и автоматические тормоза включены, и его реверсоры тяги находятся в нерабочем убранном положении (орган 1 управления находится в убранном положении).
При касании колесами земли, поскольку двигатели летательного аппарата предпочтительно находятся в режиме малого газа, пилот может привести в действие развертывание реверсоров тяги путем перевода органа 1 управления в положение середины хода (фиг.4D).
Как только реверсоры тяги оказываются в рабочем развернутом положении, пилот может задать режим двигателей при помощи органа 1 управления в диапазоне между режимом малого газа (орган 1 управления находится в положении середины хода) и максимально допустимым режимом, когда реверсоры тяги находятся в рабочем развернутом положении (орган 1 управления занимает положение полного хода, описанное ниже со ссылками на фиг.4С), чтобы контролировать торможение летательного аппарата.
Когда скорость летательного аппарата, самое большее, равна первому порогу скорости, пилот может произвести убирание реверсоров тяги. Для этого он сначала переводит орган 1 управления в положение середины хода (фиг.4D), чтобы двигатели работали в режиме малого газа. Затем он переводит орган 1 управления в убранное положение (фиг.4А), чтобы реверсоры тяги перешли из рабочего развернутого положения в нерабочее убранное положение.
Следует отметить, что в ручном режиме применение реверсоров тяги во время прерывания взлета аналогично применению, описанному в связи с приземлением.
Как показано на фиг.2, орган 1 управления может выдавать электрические сигналы, которые передаются на устройство 1 управления, осуществляющее способ в соответствии с настоящим изобретением, через линию связи 10. Предпочтительно устройство 2 управления интегрировано в систему управления полетом FMS летательного аппарата.
Устройство 2 управления может также, но не исключительно, принимать электрические сигналы, передаваемые приводами 3 управления летательным аппаратом, приводами шасси 4, приборами 5 полетных данных и устройством 6 управления газом, через линию связи 11, как показано на фиг.2. Кроме того, оно может передавать и принимать электрические сигналы от интерфейса 7 управления через линию связи 12.
Интерфейс 7 управления может передавать и принимать электрические сигналы от электронного управления 8 двигателями через линию связи 13 и от блока 9 управления реверсорами тяги через линию связи 14.
В примере выполнения устройство 2 управления содержит, в частности, следующие логические устройства, показанные на соответствующих фиг.3А-3Е в виде структурных схем:
- логическое устройство 15 развертывания (фиг.3А), позволяющее управлять развертыванием (этап Е3) реверсоров тяги;
- логическое устройство 20 возврата положения (фиг.3В), которое позволяет проверять (этап Е4) развертывание реверсоров тяги;
- логическое устройство 22 применения режима (фиг.3С), связанное с каждым двигателем, которое позволяет управлять режимом (этап Е5) упомянутого двигателя, применяя для него заранее определенный режим, соответствующий реверсивной тяге, выбранной на этапе Е1;
- логическое устройство 24 снижения режима (фиг.3D), связанное с каждым двигателем, которое позволяет управлять переводом в режим малого газа упомянутого двигателя (этап Е6); и
- логическое устройство 26 убирания (фиг.3Е), позволяющее управлять убиранием реверсора тяги упомянутого двигателя (этап Е7).
Как показано на фиг.3А, логическое устройство 15 развертывания содержит первый логический порт И 16, содержащий пять входов и один выход. Логический порт И 16 может выдавать сигнал S1 на своем выходе, когда каждый из его пяти входов принимает сигнал. В этом случае сигнал S1 является сигналом управления развертыванием реверсоров тяги, который передается на интерфейс 7 управления через линию связи 12.
Например, первый логический порт И 16 может принимать:
- первый сигнал S2, представляющий положение малого газа рычагов газа двигателей летательного аппарата, на первом входе. Если, по меньшей мере, один из рычагов газа не занимает положение малого газа, на этот первый вход не поступает никакого сигнала;
- второй сигнал S3, представляющий скорость летательного аппарата, когда она превышает первый порог скорости, на втором входе. На второй вход не поступает никакого сигнала, если скорость, самое большее, равна первому порогу скорости;
- третий сигнал S4, представляющий включенное состояние воздушных тормозов и автоматических тормозов летательного аппарата, на третьем входе, который связан с выходом второго логического порта И 17, содержащего два входа. Сигнал S4 выдается на выходе второго логического порта И 17, когда сигнал S7, представляющий включенное состояние воздушных тормозов, и сигнал S8, представляющий включенное состояние автоматических тормозов, поступают соответственно на первый и второй входы логического порта И 17. При отсутствии, по меньшей мере, одного из сигналов S7 или S8, никакой сигнал не выдается;
- четвертый сигнал S5, представляющий контакт летательного аппарата с землей, на четвертом входе, который связан с выходом третьего логического порта И 18, содержащего три входа. Сигнал S5 выдается на выходе третьего логического порта И 18, когда сигнал S9, представляющий высоту полета летательного аппарата, когда она, самое большее, равна заранее определенному порогу высоты (например, 5 футов), сигнал S10, представляющий скорость колес главного шасси, когда она превышает заранее определенный третий порог скорости (например, 72 узла), и сигнал S11, представляющий состояние обжатия главного шасси, поступают соответственно на его три входа;
- пятый сигнал S6, представляющий включенное состояние реверсоров тяги летательного аппарата, на пятом входе, который связан с четвертым логическом портом И 19, содержащим три входа. Сигнал S6 выдается на выходе четвертого логического порта И 19, когда сигнал S12, представляющий автоматическое положение, занимаемое органом 1 управления, сигнал S13, представляющий конфигурацию захода на посадку летательного аппарата, и сигнал S14, представляющий выбор пилотом уровня реверсивной тяги, поступают соответственно на его три входа.
Как показано на фиг.3В, логическое устройство 20 возврата положения содержит логический порт И 21 с двумя входами, которые выдает на выходе сигнал S15 подтверждения развертывания реверсоров тяги, когда два сигнала S17 и S18, каждый из которых представляет развернутое состояние реверсора тяги двигателя, поступают соответственно на его два входа. Вместе с тем, если, по меньшей мере, один из реверсоров тяги развернут неправильно, на выходе логического порта И 21 передается сигнал S16 ненормального развертывания реверсоров тяги.
Кроме того, как показано на фиг.3С, каждое логическое устройство 22 применения режима содержит логический порт И 23 с тремя входами. Он может выдавать на своем выходе сигнал S19, когда на его три входа поступают сигналы S15, S17 или S18 (в зависимости от двигателя, связанного с логическим устройством 22) и сигнал S12. В этом случае сигнал S19 является сигналом управления режимом двигателя, применяемым к двигателю, связанному с логическим устройством 22, для получения на выходе соответствующего реверсора тяги реверсивной тяги, заранее выбранной (этап Е1) пилотом. Сигнал S19 передается на интерфейс 7 управления через линию связи 12.
Кроме того, как показано на фиг.3D, каждое логическое устройство 24 снижения режима содержит логический порт И 25 с тремя входами. Он может выдавать на выходе сигнал S20, когда сигнал S17 или S18 (в зависимости от двигателя, связанного с логическим устройством 24), сигнал S21, представляющий скорость летательного аппарата, когда она, самое большее, равна первому порогу скорости, и сигнал S22, представляющий скорость летательного аппарата, когда она превышает заранее определенный четвертый порог скорости (например, 3 узла), поступают на его три входа. В этом случае сигнал S20 является сигналом управления для снижения режима двигателя, связанного с логическим устройством 24, до режима малого газа. Сигнал S20 передается на интерфейс 7 управления через линию связи 12.
Кроме того, как показано на фиг.3Е, каждое логическое устройство 26 убирания содержит логический порт И 27 с четырьмя входами. Он может выдавать на выходе сигнал S23, когда:
- сигнал S17 или S18 (в зависимости от двигателя, связанного с логическим устройством 26);
- сигнал S24, представляющий скорость летательного аппарата, когда она, самое большее, равна второму порогу скорости;
- сигнал S22;
- сигнал S25 или S26 (в зависимости от двигателя, связанного с логическим устройством 26), каждый из которых представляет режим двигателя, когда он работает в режиме малого газа;
поступают соответственно на его четыре входа. В этом случае сигнал S23 является сигналом управления убирания реверсора тяги двигателя, связанного с логическим устройством 26. Сигнал S23 передается через линию связи 12 на интерфейс 7 управления, который переправляет затем эту команду на убирание на блок 9 управления реверсорами тяги через линию связи 14.
Как показано на фиг.4А-4D, орган 1 управления предпочтительно содержит рычаг 28, который может перемещаться скольжением в подвижной направляющей 29, выполненной с возможностью поворота вокруг оси, перпендикулярной к плоскости сечения, проходящей через А. На своем нижнем конце рычаг 28 содержит шип 30, который может перемещаться в направляющем пазу 31, выполненном в конструкции органа 1 управления. Направляющий паз 31 содержит окружной участок 31А с центром А и на своем левом конце - радиальный вырез 31В, в который может заходить шип 30. Таким образом, рычаг 28 может перемещаться поворотным движением вокруг центра А, при котором шип 30 перемещается в окружном участке 31А направляющего паза 31, и поступательным движением, при котором шип заходит в радиальный вырез 31В.
В предпочтительном варианте выполнения орган 1 управления может занимать следующие положения:
- убранное положение (фиг.4А), в котором рычаг полностью повернут вправо, при этом шип 30 упирается в левый конец окружного участка 31А направляющего паза 31. В этом убранном положении реверсоры тяги находятся в нерабочем убранном положении;
- автоматическое положение (фиг.4В), в котором рычаг 28 пилот слегка оттягивает вверх рычаг 28 из убранного положения. При этом шип 30 заходит в радиальный вырез 31В. Вышеуказанный автоматический режим активирован;
- положение полного хода (фиг.4С), в котором рычаг 28 полностью повернут влево. При этом шип 30 упирается в правый конец окружного участка 31А направляющего паза 31. В положении полного хода реверсоры тяги находятся в рабочем развернутом положении, и режим двигателей достигает максимально допустимого режима, когда реверсоры развернуты;
- положение середины хода, в котором рычаг 28 занимает промежуточное положение между убранным положением и положением полного хода. При этом шип 30 находится, например, в равноудаленном положении от двух концов окружного участка 31А. В положении середины хода двигатели работают в режиме малого газа, и реверсоры тяги находятся в рабочем развернутом положении.
Способ и устройство для применения реверсоров тяги летательного аппарата. Согласно изобретению автоматически осуществляются следующие последовательные этапы: развертывание (Е3) предварительно включенных реверсоров тяги летательного аппарата; применение (Е5) заранее определенного режима для двигателей; снижение (Е6) режима двигателей; убирание (Е7) реверсоров тяги летательного аппарата. Технический результат изобретения - повышение надежности в управлении летательным аппаратом на земле. 3 н. и 7 з.п. ф-лы, 4 ил.
1. Способ применения реверсоров тяги во время приземления или взлета летательного аппарата, оборудованного, по меньшей мере, двумя турбинными двигателями с индивидуальным управлением режимами в диапазоне между режимом малого газа и режимом полного газа при помощи рычагов газа, соответственно связанных с упомянутыми двигателями, при этом упомянутыми реверсорами тяги управляют при помощи, по меньшей мере, одного органа (1) управления для перехода из нерабочего убранного положения в рабочее развернутое положение и, наоборот, из рабочего развернутого положения в нерабочее убранное положение,
отличающийся тем, что следующие последовательные этапы осуществляют автоматически:
a) развертывание (Е3) предварительно включенных упомянутых реверсоров тяги, когда:
- режим упомянутых двигателей, самое большее, равен заранее определенному нижнему порогу режима;
- скорость летательного аппарата превышает заранее определенный первый порог скорости; и
- отмечен контакт летательного аппарата с землей;
b) применение (Е5) для упомянутых двигателей заранее определенного режима, по меньшей мере, равного упомянутому нижнему порогу, пока скорость летательного аппарата превышает упомянутый первый порог скорости;
c) как только скорость упомянутого летательного аппарата, самое большее, равна упомянутому первому порогу скорости, снижение (Е6) режима упомянутых двигателей таким образом, чтобы они достигли режима двигателя, самое большее, равного упомянутого нижнего порога режима;
d) затем убирание (Е7) упомянутых реверсоров тяги.
2. Способ по п.1, отличающийся тем, что убирание упомянутых реверсоров тяги происходит, когда скорость упомянутого летательного аппарата, самое большее, равна заранее определенному второму порогу скорости, при этом упомянутый второй порог скорости ниже упомянутого первого порога скорости.
3. Способ по п.1, отличающийся тем, что упомянутые реверсоры тяги включаются, если соблюдены следующие условия:
- пилот выбрал (Е1) реверсивную тягу, соответствующую упомянутому заранее определенному режиму, применяемому для двигателей на этапе b);
- пилот установил (Е2) орган (1) управления упомянутыми реверсорами тяги в заранее определенное положение, называемое автоматическим положением;
- летательный аппарат находится в одной из двух следующих конфигураций:
- в конфигурации захода на посадку перед приземлением;
- в конфигурации взлета.
4. Способ по п.1, отличающийся тем, что в случае неисправности, по меньшей мере, одного из упомянутых реверсоров тяги для каждого из упомянутых двигателей определяют новый режим для установки на этапе b).
5. Способ по п.1, отличающийся тем, что во время посадки реверсоры тяги включаются, если соблюдены следующие условия:
- пилот зарегистрировал параметры приземления;
- пилот установил (Е2) орган (1) управления упомянутыми реверсорами тяги в заранее определенное положение, называемое автоматическим положением;
- летательный аппарат находится в конфигурации захода на посадку;
и тем, что упомянутый режим для применения к двигателям на этапе b) определяют в зависимости от упомянутых зарегистрированных параметров и от реальных условий приземления таким образом, чтобы он был оптимальным.
6. Устройство (2) управления для применения способа по п.1, отличающееся тем, что содержит:
- логическое устройство (15) развертывания, позволяющее управлять упомянутым развертыванием (Е1) реверсоров тяги;
- логические устройства (22) применения режима, каждое из которых позволяет управлять упомянутым применением (Е5) заранее определенного режима для одного из упомянутых двигателей;
- логические устройства (24) снижения режима, каждое из которых позволяет управлять упомянутым снижением (Е6) режима одного из упомянутых двигателей; и
- логические устройства (26) убирания, каждое из которых позволяет управлять упомянутым убиранием (Е7) реверсора тяги одного из упомянутых двигателей.
7. Устройство по п.6, отличающееся тем, что дополнительно содержит логическое устройство (20) возврата положения, позволяющее производить упомянутую проверку (Е4) правильного развертывания упомянутых реверсоров тяги.
8. Устройство по п.7, отличающееся тем, что соединено через линию связи (10, 11), по меньшей мере, с одним из следующих средств упомянутого летательного аппарата:
- с приводами (3) управления самолетом;
- с приводами (4) шасси;
- с приборами (6) полетных данных;
- с устройством (6) управления газом;
- с органом (1) управления упомянутыми реверсорами тяги;
таким образом, чтобы принимать сигналы, представляющие данные, способные быть используемыми упомянутыми логическими устройствами развертывания (15), применения режима (22), снижения режима (24), убирания (26) и возврата положения (20).
9. Устройство по п.7, отличающееся тем, что дополнительно соединено через линию связи (12) с интерфейсом (7) управления, связанным с электронным управлением (8) упомянутыми двигателями и с блоком (9) управления упомянутыми реверсорами тяги, таким образом, чтобы принимать от упомянутого интерфейса (7) управления сигналы данных, способные быть используемыми упомянутыми логическими устройствами применения режима (22), снижения режима (24), убирания (26) и возврата положения (20) и передавать ему сигналы управления соответственно от упомянутых двигателей и упомянутых реверсоров тяги.
10. Летательный аппарат, отличающийся тем, что содержит упомянутое устройство (2) управления по п.6.
| FR 2872223 А, 30.12.2005 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ МЯГКОЙ КАРАМЕЛИ | 2003 |
|
RU2250025C2 |
| US 3618880 А, 09.11.1971 | |||
| RU 23113681 А, 27.12.2007 | |||
| RU 2003131383 А, 10.04.2005 | |||
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2142569C1 |

