Область техники
Настоящее изобретение относится к двигателю, содержащему кольцеобразные статоры, расположенные вокруг оси; первый ротор, вращающийся вокруг упомянутой оси; и второй ротор, расположенный между статором и первым ротором и вращающийся вокруг упомянутой оси.
Также настоящее изобретение относится к структуре ротора, содержащей ротор, изготовленный из магнитно-мягкого материала и вращающийся вокруг оси, и множество индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала и поддерживаемых на роторе с определенными интервалами вдоль окружности.
Кроме того, настоящее изобретение относится к магнитной машине, содержащей первый ряд магнитных полюсов, в котором множество магнитных полюсов расположены вдоль окружности, второй ряд магнитных полюсов, в котором множество магнитных полюсов расположены вдоль окружности, и ряд индукционных магнитных полюсов, в котором множество индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала, расположены вдоль окружности, причем ряд индукционных магнитных полюсов расположен между первым рядом магнитных полюсов и вторым рядом магнитных полюсов.
Предшествующий уровень техники
Известен обычный двигатель, раскрытый, например, в нижеупомянутой патентной публикации 1. Этот двигатель имеет внутренний ротор, статор и внешний ротор. Внутренний ротор имеет колоннообразную форму, в которой множество постоянных магнитов, проходящих почти в радиальном направлении, расположены вдоль окружности. Статор имеет цилиндрическую форму, в которой множество якорей расположены вдоль окружности и зафиксированы посредством заливки смолой. Внешний ротор имеет цилиндрическую форму и включает в себя катушку, намотанную на сердечник, образуемый множеством шихтованных колец, причем электрическая мощность не подается на эту катушку. Внутренний ротор, статор и внешний ротор располагаются последовательно с внутренней стороны, так что они могут вращаться относительно друг друга.
В данном двигателе, когда на статор подается энергия, чтобы генерировать вращающееся магнитное поле, магнитный полюс постоянного магнита внутреннего ротора притягивается/отталкивается магнитным полюсом статора, так что внутренний ротор вращается синхронно с вращающимся магнитным полем, а внешний ротор вращается посредством электромагнитной индукции без синхронизации с вращающимся магнитным полем.
Кроме того, в патентной публикации 2 раскрыт двигатель с двухосевым выходом, в котором кольцеобразный статор, имеющий множеством якорей и генерирующий вращающееся магнитное поле, прикреплен к корпусу, первый ротор, поддерживающий множество постоянных магнитов на своей внешней окружности, установлен внутри статора с возможностью вращения, а цилиндрический второй ротор, поддерживающий множество индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала, установлен между статором и первым ротором с возможностью вращения, благодаря чему выходная мощность двигателя может быть по отдельности снята с первого ротора и второго ротора.
Патентная Публикация 1: выложенная японская патентная заявка №11-341757;
Патентная Публикация 2: патент Японии №3427511.
Тем не менее, двигатель, описанный в Патентном Документе 1, имеет недостаток, заключающийся в невозможности достижения высокой эффективности, поскольку внешний ротор вращается посредством электромагнитной индукции, и двигатель функционирует не как синхронная машина, а как асинхронная машина. Кроме того, поскольку внешний ротор вращается посредством электромагнитной индукции, индуцируемый ток, генерируемый в катушке внешнего ротора, и вихревые токи, генерируемые в сердечнике внешнего ротора, вызывают тепловыделение во внешнем роторе, в результате чего возникает необходимость охлаждения внешнего ротора.
Для решения упомянутых проблем заявитель предложил новый двигатель, раскрытый в японской патентной заявке №2006-217141.
Этот двигатель содержит кольцеобразный статор, расположенный вокруг оси, внутренний ротор, вращающийся вокруг оси, и внешний ротор, расположенный между статором и внутренним ротором и вращающийся вокруг оси. Статор содержит первый ряд якорей, включающий в себя множество первых якорей и генерирующий первое вращающееся магнитное поле, которое вращается по окружности, и второй ряд якорей, включающий в себя множество вторых якорей и генерирующий второе вращающееся магнитное поле, которое вращается по окружности, причем первый ряд якорей и второй ряд якорей примыкают друг к другу. Внутренний ротор содержит первый ряд постоянных магнитов, который включает в себя множество первых постоянных магнитов, и второй ряд постоянных магнитов, который включает в себя множество вторых постоянных магнитов, причем первый ряд постоянных магнитов и второй ряд постоянных магнитов примыкают друг к другу. Внешний ротор содержит первый ряд индукционных магнитных полюсов, включающий в себя множество первых индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала, и второй ряд индукционных магнитных полюсов, включающий в себя множество вторых индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала, причем упомянутые индукционные магнитные полюса расположены в осевом направлении, и упомянутый первый ряд индукционных магнитных полюсов и второй ряд индукционных магнитных полюсов примыкают друг к другу. Первый ряд якорей и первый ряд постоянных магнитов являются противоположными на противоположных сторонах в радиальном направлении первого ряда индукционных магнитных полюсов, соответственно, а второй ряд якорей и второй ряд постоянных магнитов являются противоположными на противоположных сторонах в радиальном направлении второго ряда индукционных магнитных полюсов, соответственно.
Тем не менее в двигателе, предложенном в японской патентной заявке №2006-217141, фаза первого индукционного магнитного полюса и фаза второго индукционного магнитного полюса, поддерживаемых внешним ротором, смещены на половину шага (на электрический угол 90°), что усложняет конструкцию для поддержки первых и вторых индукционных магнитных полюсов во внешнем роторе, по причине чего становится сложным обеспечить надежность внешнего ротора.
Кроме того, в двигателе с двухосевым выходом, раскрытом в публикации 2, поскольку для крепления индукционного полюса к ротору используется средство крепления, такое как болт, количество деталей и этапов сборки увеличивается соответствующим образом, что приводит к проблеме увеличения стоимости. В частности, когда индукционный магнитный полюс изготовлен из шихтованных металлических пластин, сложности возникают не только при точной машинной обработке внутренней резьбы, но и при обеспечении достаточного усилия крепления болта.
Кроме того, во вращающемся двигателе, раскрытом в японском патенте №3427511, если магнитные полюса постоянных магнитов внутреннего ротора, индукционные магнитные полюса внешнего ротора и магнитные полюса якорей в статоре располагаются на одной линии в радиальном направлении, то магнитный поток из магнитного полюса внутреннего ротора проходит через индукционный магнитный полюс внешнего ротора, расположенного снаружи в его радиальном направлении, и дальше проходит в магнитный полюс статора, расположенный снаружи в его радиальном направлении. Тем не менее, если индукционный магнитный полюс внешнего ротора смещается вдоль окружности и располагается между двумя магнитными полюсами, примыкающими друг к другу по окружности внутреннего ротора, то магнитный поток из магнитного полюса внутреннего ротора проходит сквозь индукционный магнитный полюс внешнего ротора, расположенного снаружи в его радиальном направлении, и замыкает накоротко магнитный полюс, смежный с магнитным полюсом внутреннего ротора по направлению окружности. Соответственно, магнитная эффективность падает и невозможно обеспечить достаточную производительность вращающегося двигателя.
Краткое изложение существа изобретения
Настоящее изобретение было сделано с учетом вышеупомянутых недостатков. Первым объектом настоящего изобретения является упрощение конструкции ротора, поддерживающего индукционные магнитные полюсы в двигателе, и повышение надежности.
Вторым объектом настоящего изобретения является надежное крепление индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала, к ротору с упрощенной конструкцией.
Третьим объектом настоящего изобретения является повышение производительности путем минимизации короткого замыкания магнитного потока в магнитной машине, в которой ряд индукционных магнитных полюсов расположен между первым и вторым рядами магнитных полюсов.
Для решения первой задачи согласно первому отличительному признаку настоящего изобретения предложен двигатель, содержащий кольцеобразные статоры, расположенные вокруг оси; первый ротор, вращающийся вокруг оси; и второй ротор, расположенный между статором и первым ротором и вращающийся вокруг оси;
причем статоры содержат первый ряд якорей и второй ряд якорей, которые расположены в направлении оси, причем первый ряд якорей включает в себя множество первых якорей, имеющих полярности и расположенных вдоль окружности, и генерирует первое вращающееся магнитное поле, вращающееся по окружности посредством магнитного полюса, генерируемого во множестве первых якорей при подаче электроэнергии, а второй ряд якорей включает в себя множество вторых якорей, которые расположены по окружности и генерирует второе вращающееся магнитное поле, вращающееся по окружности посредством магнитного полюса, генерируемого во множестве вторых якорей при подаче питания;
причем первый ротор содержит первый ряд постоянных магнитов и второй ряд постоянных магнитов, которые расположены в направлении оси, причем первый ряд постоянных магнитов включает в себя множество первых постоянных магнитов, расположенных так, чтобы их магнитные полюса имели поочередно изменяющуюся полярность с заданным шагом вдоль окружности, а второй ряд постоянных магнитов включает в себя множество вторых постоянных магнитов, расположенных так, чтобы их магнитные полюса имели поочередно изменяющуюся полярность с заданным шагом вдоль окружности;
причем второй ротор содержит первый ряд индукционных магнитных полюсов и второй ряд индукционных магнитных полюсов, которые расположены в направлении оси, причем первый ряд индукционных магнитных полюсов включает в себя множество первых индукционных магнитных полюсов, расположенных с заданным шагом вдоль окружности и изготовленных из магнитно-мягкого материала, а второй ряд индукционных магнитных полюсов включает в себя множество вторых индукционных магнитных полюсов, расположенных с заданным шагом вдоль окружности и изготовленных из магнитно-мягкого материала;
причем первый ряд якорей и первый ряд постоянных магнитов являются противоположными на противоположных сторонах в радиальном направлении первого ряда индукционных магнитных полюсов, соответственно, а второй ряд якорей и второй ряд постоянных магнитов являются противоположными на противоположных сторонах в радиальном направлении второго ряда индукционных магнитных полюсов, соответственно; и
при этом фаза магнитного полюса первого ряда постоянных магнитов и фаза магнитного полюса второго ряда постоянных магнитов первого ротора смещены относительно друг друга на половину заданного шага вдоль окружности, фаза полярности первого вращающегося магнитного поля и фаза полярности второго вращающегося магнитного поля статора смещены относительно друг друга на половину заданного шага вдоль окружности, и фаза первого индукционного магнитного полюса и фаза второго индукционного магнитного полюса второго ротора совпадают друг с другом.
Согласно второму отличительному признаку настоящего изобретения дополнительно к первому отличительному признаку в цилиндрическом теле второго ротора сформировано множество щелей, проходящих линейно в направлении оси, и первые и вторые индукционные магнитные полюсы плотно вставлены в эти щели.
Для решения второй задачи согласно третьему отличительному признаку настоящего изобретения предложена конструкция ротора, содержащая ротор, изготовленный из магнитно-мягкого материала и вращающийся вокруг оси, и множество индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала и поддерживаемых на роторе через заданные интервалы вдоль окружности, характеризующаяся тем, что индукционные магнитные полюсы вставлены в ротор.
Согласно четвертому отличительному признаку настоящего изобретения дополнительно к третьему отличительному признаку часть каждого индукционного магнитного полюса открыта на внешней круглой поверхности ротора.
Согласно пятому отличительному признаку настоящего изобретения дополнительно к третьему или четвертому отличительному признаку ротор имеет цилиндрическую форму, и часть каждого индукционного магнитного полюса открыта на внутренней круглой поверхности ротора.
Согласно шестому отличительному признаку настоящего изобретения дополнительно к любому из отличительных признаков с третьего по пятый сторона, по которой ротор входит в контакт с индукционными магнитными полюсами, имеет форму, которая ограничивает движение индукционных магнитных полюсов в радиальном направлении относительно ротора.
Согласно седьмому отличительному признаку настоящего изобретения дополнительно к шестому отличительному признаку движение индукционных магнитных полюсов в радиальном направлении относительно ротора ограничивается посредством сцепления между выступами, предусмотренными на роторе, и углублениями, предусмотренными в каждом индукционном магнитном полюсе.
Согласно восьмому отличительному признаку настоящего изобретения дополнительно к любому из отличительных признаков с третьего по седьмой ротор содержит множество щелей, проходящих в направлении оси; и множество индукционных магнитных полюсов и прокладок, изготовленных из магнитно-мягкого материала и расположенных между магнитными полюсами рядом друг с другом в направлении оси, вставленных в упомянутые щели.
Согласно девятому отличительному признаку настоящего изобретения дополнительно к восьмому отличительному признаку сторона, по которой ротор входит в контакт с прокладкой, имеет форму, которая ограничивает движение прокладки в радиальном направлении относительно ротора.
Согласно десятому отличительному признаку настоящего изобретения дополнительно к восьмому или девятому отличительному признаку внешняя круглая сторона прокладки покрыта кольцом, изготовленным из магнитно-мягкого материала.
Согласно одиннадцатому отличительному признаку настоящего изобретения дополнительно к любому из отличительных признаков с третьего по десятый конструкция ротора дополнительно содержит держатель для ограничения движения индукционных магнитных полюсов в направлении оси относительно ротора.
Согласно двенадцатому отличительному признаку настоящего изобретения дополнительно к любому из отличительных признаков с третьего по одиннадцатый ротор дополнительно содержит корпус ротора приплюснутой цилиндрической формы; крышку ротора, соединенную с корпусом ротора таким образом, чтобы закрывать отверстие корпуса ротора; и вращающиеся валы, предусмотренные в донных частях корпуса ротора и крышки ротора.
Для достижения третьей цели согласно тринадцатому отличительному признаку настоящего изобретения предложена магнитная машина, содержащая первый ряд магнитных полюсов, в котором множество магнитных полюсов расположены вдоль окружности, второй ряд магнитных полюсов, в котором множество магнитных полюсов расположены вдоль окружности, и ряд индукционных магнитных полюсов, в котором множество индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала, расположены вдоль окружности, причем ряд индукционных магнитных полюсов распложен между первым рядом магнитных полюсов и вторым рядом магнитных полюсов, отличающаяся тем, что угол θ2, формируемый противоположными концами вдоль окружности индукционных магнитных полюсов ряда индукционных магнитных полюсов относительно оси, устанавливается меньшим, чем, по меньшей мере, один из угла θ1 машины, соответствующего электрическому углу 180° магнитных полюсов первого ряда магнитных полюсов, и угла θ0 машины, соответствующего электрическому углу 180° магнитных полюсов второго ряда магнитных полюсов.
Согласно четырнадцатому отличительному признаку настоящего изобретения предложена магнитная машина, содержащая первый ряд магнитных полюсов, в котором множество магнитных полюсов расположены в линейном направлении, второй ряд магнитных полюсов, в котором множество магнитных полюсов расположены в линейном направлении, и ряд индукционных магнитных полюсов, в котором множество индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала, расположены в линейном направлении, причем ряд индукционных магнитных полюсов расположен между первым рядом магнитных полюсов и вторым рядом магнитных полюсов, характеризующаяся тем, что расстояние L2 между противоположными в линейном направлении концами индукционных магнитных полюсов ряда индукционных магнитных полюсов устанавливается меньшим, чем, по меньшей мере, расстояние L1, соответствующее электрическому углу 180° магнитных полюсов первого ряда магнитных полюсов, и расстояние L0, соответствующее электрическому углу 180° магнитных полюсов второго ряда магнитных полюсов.
Согласно пятнадцатому отличительному признаку настоящего изобретения в добавление к тринадцатому или четырнадцатому отличительному признаку один из первого ряда магнитных полюсов и второго ряда магнитных полюсов содержит множество якорей, и движущееся магнитное поле генерируется посредством управления электрической энергией для множества якорей, благодаря чему двигается, по меньшей мере, один из первого ряда магнитных полюсов и второго ряда магнитных полюсов и ряда индукционных магнитных полюсов.
Согласно шестнадцатому отличительному признаку настоящего изобретения дополнительно к тринадцатому или четырнадцатому отличительному признаку один из первого ряда магнитных полюсов и второго ряда магнитных полюсов содержит множество якорей, и, по меньшей мере, один из первого ряда магнитных полюсов и второго ряда магнитных полюсов и ряда индукционных магнитных полюсов движется посредством внешней силы, тем самым, генерируя электродвижущую силу на множестве якорей.
Согласно семнадцатому отличительному признаку настоящего изобретения дополнительно к тринадцатому или четырнадцатому отличительному признаку, по меньшей мере, один из первого ряда магнитных полюсов, второго ряда магнитных полюсов и ряда индукционных магнитных полюсов перемещается посредством внешней силы таким образом, чтобы перемещать, по меньшей мере, один из остальных двух рядов.
Внешний ротор 13 описанных вариантов осуществления соответствует ротору или второму ротору настоящего изобретения, внутренний ротор 14 описанных вариантов осуществления соответствует первому ротору настоящего изобретения, первый и второй статоры 12L, 12R описанных вариантов осуществления соответствуют статору настоящего изобретения, первый и второй якоря 21L, 21R описанных вариантов осуществления соответствуют магнитному полюсу первого ряда магнитных полюсов или якорю настоящего изобретения, первый и второй валы 34, 36 внешнего ротора описанных вариантов осуществления соответствуют вращающемуся валу настоящего изобретения, первый и второй индукционные магнитные полюса 38L, 38R описанных вариантов осуществления соответствуют индукционным магнитным полюсам настоящего изобретения, а первый и второй постоянные магниты 52L, 52R описанных вариантов осуществления соответствуют магнитным полюсам второго ряда магнитных полюсов настоящего изобретения.
Полезный эффект изобретения
Согласно первому отличительному признаку настоящего изобретения двигатель содержит кольцеобразный статор, генерирующий первое и второе вращающиеся магнитные поля посредством первых и вторых якорей, расположенных так, чтобы окружать ось; первый ротор, содержащий первый и второй ряды магнитных полюсов, включающие в себя первые и вторые постоянные магниты и вращающиеся вокруг оси; и второй ротор, который расположен между статором и первым ротором и который содержит первый и второй ряды индукционных магнитных полюсов, включающие в себя первые и вторые индукционные магнитные полюса и вращающиеся вокруг упомянутой оси. Первый ряд якорей и первый ряд постоянных магнитов являются противоположными на противоположных сторонах в радиальном направлении первого ряда индукционных магнитных полюсов, соответственно, а второй ряд якорей и второй ряд постоянных магнитов являются противоположными на противоположных сторонах в радиальном направлении второго ряда индукционных магнитных полюсов, соответственно. Соответственно, путем управления электрической мощностью для первого и второго якорей для вращения первого и второго вращающихся магнитных полей линия магнитной индукции формируется таким образом, что она проходит сквозь первые и вторые якоря, первые и вторые постоянные магниты и первые и вторые индукционные магнитные полюсы, так что один или оба из первого ротора и второго ротора может быть приведен во вращение.
В это время фаза магнитного полюса первого ряда постоянных магнитов и фаза магнитного полюса второго ряда постоянных магнитов смещаются относительно друг друга на половину заданного шага вдоль окружности, и фаза полярности первого вращающегося магнитного поля и фаза полярности второго вращающегося магнитного поля статора смещаются относительно друг друга на половину заданного шага вдоль окружности. Следовательно, фаза первого индукционного магнитного полюса и фаза второго индукционного магнитного полюса второго ротора могут совпадать друг с другом. Таким образом, обеспечивается не только упрощение конструкции второго ротора и повышение его надежности, а также облегчается поддержка и сборка первого и второго индукционных магнитных полюсов во втором роторе.
Согласно второму отличительному признаку настоящего изобретения поскольку первые и вторые индукционные магнитные полюса вставляются во множество щелей, предусмотренных в корпусе второго ротора и проходящих в направлении упомянутой оси, при этом сборка первых и вторых магнитных полюсов на корпусе ротора облегчается.
Согласно третьему отличительному признаку индукционные магнитные полюса встраиваются в ротор, чтобы поддерживать множество индукционных магнитных полюсов, изготовленных из магнитно-мягкого материала через заданные интервалы вдоль окружности в роторе, изготовленном из слабомагнитного материала и вращающемся вокруг упомянутой оси. Следовательно, обеспечивается возможность поддержки индукционных магнитных полюсов в роторе без использования выделенного элемента крепления, такого как болт, благодаря чему количество деталей уменьшается согласно количеству элементов крепления.
Согласно четвертому отличительному признаку, поскольку часть индукционного магнитного полюса открыта на внешней круглой поверхности ротора, обеспечивается возможность уменьшения воздушного зазора, образуемого между ротором и магнитным полюсом и расположенного снаружи ротора.
Согласно пятому отличительному признаку, поскольку ротор имеет цилиндрическую форму и часть индукционного магнитного полюса открыта на внутренней круглой поверхности ротора, обеспечивается возможность уменьшения воздушного зазора, образуемого между ротором и магнитным полюсом и расположенного внутри ротора.
Согласно шестому отличительному признаку, поскольку сторона, по которой ротор и индукционный магнитный полюс входят в контакт, имеет форму, которая ограничивает движение индукционного магнитного полюса в радиальном направлении относительно ротора, обеспечивается возможность предотвращения отсоединения индукционного магнитного полюса из-за центробежной силы, возникающей во время вращения ротора.
Согласно седьмому отличительному признаку, поскольку выступы, предусмотренные на роторе, и углубления, предусмотренные в индукционных магнитных полюсах, сцепляются друг с другом, ограничивается движение индукционных магнитных полюсов в радиальном направлении относительно ротора, а также посредством углубления устраняется лишняя часть индукционного магнитного полюса, так что потери на вихревые токи и гистерезис также могут быть уменьшены.
Согласно восьмому отличительному признаку, поскольку во множество щелей, предусмотренных в роторе и направленных параллельно оси, вставляется множество магнитных полюсов и прокладок, изготовленных из слабомагнитного материала и расположенных между соседними в осевом направлении индукционными магнитными полюсами, облегчается сборка индукционных магнитных полюсов и прокладок для ротора, а также за счет прокладок из слабомагнитного материала, расположенных между соседними в осевом направлении индукционными магнитными полюсами, прерывается линия магнитной индукции.
Согласно девятому отличительному признаку, поскольку сторона, по которой ротор и прокладка входят в контакт, имеет форму, которая ограничивает движение прокладки в радиальном направлении относительно ротора, обеспечивается возможность предотвращения отсоединения прокладки из-за центробежной силы, возникающей во время вращения ротора.
Согласно десятому отличительному признаку, поскольку внешняя круглая сторона прокладки покрыта кольцом, изготовленным из слабомагнитного материала, обеспечивается возможность более эффективно предотвращать отсоединение прокладки из-за центробежной силы, возникающей при вращении ротора, а также обеспечивается возможность предотвращать выгибание центральной части ротора в осевом направлении из-за центробежной силы. Если предположить, что кольцо намотано на магнитно-мягкий материал, то на внешней круглой стороне магнитно-мягкого материала образуется ненужный зазор, однако образование этого зазора может быть предотвращено путем намотки кольца на внешней круглой стороне прокладки.
Согласно одиннадцатому отличительному признаку, поскольку предусмотрен держатель для ограничения движения индукционного магнитного полюса в осевом направлении относительно ротора, обеспечивается возможность предотвращения отсоединения индукционного магнитного полюса от ротора в осевом направлении.
Согласно двенадцатому отличительному признаку, поскольку ротор содержит корпус ротора приплюснутой цилиндрической формы и крышку, соединенную с корпусом ротора таким образом, чтобы закрывать отверстие корпуса ротора, и вращающиеся валы предусмотрены в донных частях корпуса ротора и крышки ротора, ротор поддерживается за свои противоположные концы, чтобы стабилизировать вращение.
Согласно тринадцатому отличительному признаку в магнитной машине, в которой ряд индукционных магнитных полюсов расположен между первым рядом магнитных полюсов и вторым рядом магнитных полюсов, угол между противоположными вдоль окружности концами индукционных магнитных полюсов ряда индукционных магнитных полюсов относительно оси устанавливается меньшим, чем, по меньшей мере, угол машины, соответствующий электрическому углу 180° магнитного полюса первого ряда магнитных полюсов, и угол машины, соответствующий электрическому углу 180° магнитного полюса второго ряда магнитных полюсов. Следовательно, предоставляется возможность подавления возникновения короткозамкнутого магнитного контура между магнитными полюсами, находящимися рядом друг с другом вдоль окружности, первого ряда магнитных полюсов или второго ряда магнитных полюсов через индукционный магнитный полюс ряда индукционных магнитных полюсов, благодаря чему повышается магнитная эффективность.
Согласно четырнадцатому отличительному признаку в магнитной машине, в которой ряд индукционных магнитных полюсов расположен между первым рядом магнитных полюсов и вторым рядом магнитных полюсов, расстояние между противоположными вдоль линии концами индукционных магнитных полюсов ряда индукционных магнитных полюсов устанавливается меньшим, чем, по меньшей мере, расстояние, соответствующее электрическому углу 180° первого ряда магнитных полюсов, и расстояние, соответствующее электрическому углу 180° второго ряда магнитных полюсов. Следовательно, предоставляется возможность подавления возникновения магнитного короткозамкнутого контура между магнитными полюсами, находящимися рядом друг с другом вдоль линии, первого ряда магнитных полюсов или второго ряда магнитных полюсов через индукционный магнитный полюс ряда индукционных магнитных полюсов, благодаря чему повышается магнитная эффективность.
Согласно пятнадцатому отличительному признаку, поскольку один из первого ряда магнитных полюсов и второго ряда магнитных полюсов содержит множество якорей, и движущееся магнитное поле генерируется путем управления электрической мощностью для множества якорей, другой из первого ряда магнитных полюсов и второго ряда магнитных полюсов или ряда индукционных магнитных полюсов движется, функционируя как двигатель.
Согласно шестнадцатому отличительному признаку, один из первого ряда магнитных полюсов и второго ряда магнитных полюсов содержит множество якорей, а другой из первого ряда магнитных полюсов и второго ряда магнитных полюсов или ряда индукционных магнитных полюсов движется благодаря внешней силе. Следовательно, предоставляется возможность генерации электродвижущей силы на множестве якорей, так что они функционируют как двигатель.
Согласно семнадцатому отличительному признаку, по меньшей мере, один из первого ряда магнитных полюсов, второго ряда магнитных полюсов и ряда индукционных магнитных полюсов движется благодаря внешней силе, чтобы двигать, по меньшей мере, один из двух других рядов, и, таким образом, ряды действуют как средство передачи движущей силы.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительного варианта воплощения со ссылками на сопровождающие чертежи, на которых:
Фиг.1 показывает вид спереди двигателя в направлении оси согласно первому варианту осуществления (вид по линии 1-1 с Фиг.2);
Фиг.2 - вид в разрезе по линии 2-2 на Фиг.1 (первый вариант осуществления);
Фиг.3 - вид в разрезе по линии 3-3 на Фиг.1 (первый вариант осуществления);
Фиг.4 - вид в разрезе по линии 4-4 на Фиг.2 (первый вариант осуществления);
Фиг.5 - вид в разрезе по линии 5-5 на Фиг.2 (первый вариант осуществления);
Фиг.6 - вид в разрезе по линии 6-6 на Фиг.3 (первый вариант осуществления);
Фиг.7 - общий вид с пространственным разнесением деталей двигателя (первый вариант осуществления);
Фиг.8 - общий вид с пространственным разнесением деталей внешнего ротора (первый вариант осуществления);
Фиг.9 - общий вид с пространственным разнесением деталей внутреннего ротора (первый вариант осуществления);
Фиг.10 - увеличенный вид детали 10 с Фиг.3 (первый вариант осуществления);
Фиг.11 - вид для разъяснения магнитного короткозамкнутого контура постоянного магнита внутреннего ротора (первый вариант осуществления);
Фиг.12 - диаграмму, где двигатель разложен вдоль окружности (первый вариант осуществления);
Фиг.13 - схемы для разъяснения первого режима работы, когда внутренний ротор зафиксирован (первый вариант осуществления);
Фиг.14 - схемы для разъяснения второго режима работы, когда внутренний ротор зафиксирован (первый вариант осуществления);
Фиг.15 - схемы для разъяснения третьего режима работы, когда внутренний ротор зафиксирован (первый вариант осуществления);
Фиг.16 - схемы для разъяснения первого режима работы, когда внешний ротор зафиксирован (первый вариант осуществления);
Фиг.17 - схемы для разъяснения второго режима работы, когда внешний ротор зафиксирован (первый вариант осуществления);
Фиг.18 (A, B) - формы выступа прокладки согласно второму варианту осуществления;
Фиг.19 - вид, соответствующий Фиг.6, согласно третьему варианту осуществления;
Фиг.20 - вид в разрезе по линии 20-20 на Фиг.19 (третий вариант осуществления);
Фиг.21 - вид в разрезе по линии 21-21 на Фиг.19 (третий вариант осуществления);
Фиг.22 - виды, соответствующие Фиг.10, согласно четвертому варианту осуществления;
Фиг.23 - вид, соответствующий Фиг.10, согласно пятому варианту осуществления;
Фиг.24 - вид, соответствующий Фиг.3, согласно шестому варианту осуществления;
Фиг.25 - увеличенные виды основных деталей на Фиг.24 (шестой вариант осуществления).
Описание предпочтительных вариантов осуществления
Далее следует описание настоящего изобретения со ссылкой на прилагаемые чертежи.
Первый вариант осуществления
Первый вариант осуществления настоящего изобретения описан со ссылкой на Фиг.1-17.
Как показано на Фиг.7, двигатель M этого варианта осуществления содержит корпус 11, формирующий восьмиугольную цилиндрическую форму, имеющую небольшую длину в направлении оси L, кольцеобразные первый и второй статоры 12L, 12R, прикрепленные к внутренней круглой поверхности корпуса 11, цилиндрический внешний ротор 13, расположенный внутри первого и второго статоров 12L, 12R и вращающийся вокруг оси L, и цилиндрический внутренний ротор 14, расположенный внутри внешнего ротора 13 и вращающийся вокруг оси L. Внешний ротор 13 и внутренний ротор 14 могут вращаться относительно друг друга и относительно неподвижных первого и второго статоров 12L, 12R.
Как показано на Фиг.1 и 2, корпус 11 имеет восьмиугольную полую цилиндрическую часть 15 корпуса и часть 15 крышки в форме восьмиугольной пластины, которая прикрепляется к отверстию части 15 корпуса посредством множества болтов 16. В части 15 корпуса и части 17 крышки для вентиляции сформировано множество отверстий 15a, 17a.
Как показано на Фиг.1-4 и 7, первый и второй статоры 12L, 12R имеют одинаковую конструкцию и они наложены друг на друга с некоторым смещением относительно друг друга вдоль окружности. Конструкция согласно настоящему изобретению описана только для одного из этих статоров, то есть для первого статора 12L. Первый статор 12L содержит множество (в данном варианте осуществления - 24) первых якорей 21L, каждый из которых включает в себя катушку 20, намотанную на внешнюю окружность сердечника 18, изготовленного из шихтованных стальных пластин с вставленными между ними изоляторами 19. Упомянутые первые якоря 21L объединены друг с другом посредством кольцеобразного держателя 22, причем они соединены вдоль окружности, формируя в целом кольцеобразную форму. Фланец 22a, выступающий в радиальном направлении с одного конца в направлении оси L держателя 22, прикреплен к ступенчатой части 15b (см. Фиг.2) на внутренней стороне части 15 корпуса посредством множества болтов 23.
Второй статор 12R снабжен 24 деталями вторых якорей 21R аналогично первому статору 12L. Фланец 22a держателя 22 прикреплен к ступенчатой части 15c (см. Фиг.2) на внутренней поверхности части 15 корпуса в корпусе 11 посредством множества болтов 24. В это время фазы вдоль окружности первого статора 12L и второго статора 12R смещены относительно друг друга на половину шага первого и второго постоянных магнитов 52L, 52R внутреннего ротора 14 (см. Фиг.3 и 4). Трехфазный переменный ток подается с контактов 25, 26, 27 (см. Фиг.1), предусмотренных на части 15 корпуса 11, на первые и вторые якоря 12L, 12R, тем самым, генерируя вращающееся магнитное поле на первом и втором статорах 12L, 12R.
Как показано на Фиг.2, 7 и 8, внешний ротор 13 представляет собой полый элемент, включающий в себя корпус 31 ротора, сформированную из слабомагнитного материала приплюснутой цилиндрической формы, и крышку 33 ротора, сформированную из слабомагнитного материала в форме диска и прикрепленную болтами 32 таким образом, чтобы закрывать отверстие корпуса 31 ротора. Первый вал 34 внешнего ротора, выступающий из центра донной части корпуса 31 ротора по оси L, поддерживается с возможностью вращения частью 15 корпуса 11 посредством подшипника 35. Второй вал 36 внешнего ротора, выступающий из центра крышки 33 ротора по оси L, поддерживается с возможностью вращения частью 17 крышки корпуса 11 посредством подшипника 37. Первый вал 34 внешнего ротора, служащий в качестве выходного вала внешнего ротора 13, проходит сквозь часть 15 корпуса 11 и выходит наружу.
Слабомагнитный материал представляет собой материал, который не притягивается магнитами, и он включает в себя смолу, дерево и т.п., дополнительно к алюминию и т.п., и в некоторых случаях его также называют немагнитным материалом.
Как показано на Фиг.2, 6, 8 и 10, множество (в настоящем варианте осуществления - 20) щелей 31a, проходящих параллельно оси L, сформированы на внешней круглой стороне корпуса 31 ротора, чтобы обеспечивать связь между внутренней частью и наружной частью в радиальном направлении. Каждая щель 31a открыта со стороны донной части корпуса 31 ротора и закрыта со стороны отверстия корпуса 31 ротора. Первые индукционные магнитные полюсы 38L, изготовленные из магнитно-мягкого материала, прокладки 39 и вторые индукционные полюсы 38R, изготовленные из магнитно-мягкого материала, вставлены в щели 31a в направлении оси L со стороны донной части корпуса 31 ротора и вставлены в них. Первые и вторые индукционные магнитные полюсы 38L, 38R сформированы из стальных пластин, шихтованных в направлении оси L.
Пара выступов 31b, 31b, выступающих навстречу друг другу, сформированы на противоположных внутренних сторонах каждой щели 31a в корпусе 31 ротора. Пара углублений 38a, 38a, 39a, 39a, которые входят в зацепление с парой выступов 31b, 31b, сформирована на внешних сторонах первых и вторых индукционных магнитных полюсов 38L, 38R и прокладок 39, которые входят в контакт со щелями 31a.
Когда первые и вторые индукционные магнитные полюсы 38L, 38R и прокладка 39 вставляются в щель 31a, как описано выше, передний конец первого индукционного магнитного полюса 38L входит в контакт с ограничителем 31c (см. Фиг.6) на переднем конце щели 31a, чтобы ограничить их движение. В этом состоянии один из множества упругих зубцов 41a, выступающих в направлении оси L из кольцеобразного держателя 41, зафиксированного на донной части корпуса 31 ротора посредством болтов 40, приводится в упругий контакт с задним концом второго индукционного магнитного полюса 38R. В результате первый и второй индукционные магнитные полюсы 38L, 38R и прокладка 39, вставленные в щель 31a, удерживаются ограничителем 31c и упругим зубцом 41a держателя 41, благодаря чему предотвращается их выход в направлении оси L и, соответственно, предотвращается шум.
Как показано на Фиг.2, первый датчик 42 положения, предназначенный для детектирования положения вращения внешнего ротора 13, размещен таким образом, чтобы окружать второй вал 36 внешнего ротора 13. Первый датчик 42 положения содержит ротор 43 датчика положения, прикрепленный к внешней круглой поверхности второго вала 36 внешнего ротора, и статор 44 датчика положения, прикрепленный к части 17 крышки корпуса 11 таким образом, чтобы окружать периферию ротора 43 датчика положения.
Как показано на Фиг.2-5 и 9, внутренний ротор 14 содержит корпус 45 ротора, сформированный в форме цилиндра, вал 47 внутреннего ротора, проходящий сквозь втулку 45a корпуса 45 ротора и зафиксированный посредством болта 46, кольцеобразные первый и второй сердечники 48L, 48R ротора, включающие в себя шихтованные стальные пластины и прикрепленные к внешней круглой поверхности корпуса 45 ротора, и кольцеобразную прокладку 49, установленную на внешней круглой поверхности корпуса 45 ротора 14. Один конец вала 47 внутреннего ротора поддерживается с возможностью вращения на оси L посредством шарикоподшипника 50 внутри первого вала 34 внешнего ротора. Другой конец вала 47 внутреннего ротора поддерживается с возможностью вращения посредством шарикоподшипника 51 внутри второго вала 36 внешнего ротора и проходит сквозь второй вал 36 внешнего ротора и часть 16 крышки корпуса 11, и выходит наружу из корпуса 11 таким образом, чтобы выполнять функцию выходного вала внутреннего ротора 14.
Первый и второй сердечники 48L, 48R ротора, прикрепленные на внешней круглой поверхности корпуса 45 ротора, имеют такую же конструкцию, и они снабжены множеством (в настоящем варианте осуществления - 20) отверстий 48a для поддержки постоянных магнитов вдоль внешней круглой поверхности (см. Фиг.3 и 4), в которые в направлении оси L впрессованы первые и вторые постоянные магниты 52L, 52R. Полярность смежных первых постоянных магнитов 52L первого сердечника 48L ротора поочередно меняется, полярность смежных вторых постоянных магнитов 52R второго сердечника 48R ротора поочередно меняется, и фаза вдоль окружности первых постоянных магнитов 52L в первом сердечнике 48L ротора и фаза вдоль окружности вторых постоянных магнитов 52R во втором сердечнике 48R ротора смещены относительно друг друга на половину шага (см. Фиг.3 и 4).
Прокладка 49, изготовленная из слабомагнитного материала, вставлена в центральную часть в направлении оси L во внешней круглой части корпуса 45 ротора; пара пластин 53, 53 для удержания первого и второго постоянных магнитов 52L, 52R вставлена с внешней стороны, соответственно; первый и второй сердечники 48L, 48R ротора вставлены с внешней стороны, соответственно; пара пластин 54, 54, удерживающих первые и вторые постоянные магниты 52L, 52R, вставлена с внешней стороны, соответственно; и пара стопорных колец 55, 55 впрессована с внешней стороны, соответственно.
Как показано на Фиг.2, второй датчик 56 положения, предназначенный для детектирования положения вращения внутреннего ротора 14, размещен таким образом, чтобы окружать вал 47 внутреннего ротора. Второй датчик 56 положения содержит ротор 57 датчика, прикрепленный к внешней круглой поверхности вала 47 внутреннего ротора, и статор 58 датчика, прикрепленный к части 17 крышки корпуса 11 таким образом, чтобы окружать периферию ротора 57 датчика положения.
Следовательно, как показано на Фиг.10 в увеличенном масштабе, внутренняя круглая поверхность первого якоря 21L первого статора 12L располагается напротив внешней круглой поверхности первого индукционного магнитного полюса 38L, открытого со стороны внешней круглой поверхности внешнего ротора 13, и между ними образуется небольшой воздушный зазор α, а внешняя круглая поверхность сердечника 48L внутреннего ротора 14 располагается напротив внутренней круглой поверхности первого индукционного полюса 38L, открытого с внутренней круглой поверхности внешнего ротора 13, и между ними образуется небольшой воздушный зазор β. Аналогично внутренняя круглая поверхность второго якоря 21R второго статора 12R располагается напротив внешней круглой поверхности второго индукционного магнитного полюса 38R, открытого со стороны внешней круглой поверхности внешнего ротора 13, и между ними образуется небольшой воздушный зазор α, а внешняя круглая поверхность сердечника 48R внутреннего ротора 14 располагается напротив внутренней круглой поверхности второго индукционного полюса 38R, открытого с внутренней круглой поверхности внешнего ротора 13, и между ними образуется небольшой воздушный зазор β.
Далее следует описание принципа работы двигателя M первого варианта осуществления, имеющего вышеописанную конструкцию.
Фиг.12 представляет собой схематические виды состояния, где двигатель разложен вдоль окружности. На правой и левой сторонах Фиг.12 показаны первый и второй постоянные магниты 52L, 52R внутреннего ротора 14, соответственно. Первый и второй постоянные магниты 52L, 52R расположены вдоль окружности (вертикальное направление на Фиг.12), причем полюсы N и S предусмотрены поочередно через заданный шаг P. Первые постоянные магниты 52L и вторые постоянные магниты 52R расположены с определенным смещением относительно друг друга, причем это смещение составляет половину заданного шага P, то есть P/2.
В центральной части Фиг.12 показаны виртуальные постоянные магниты 21, соответствующие первым и вторым якорям 21L, 21R первого и второго статоров 12L, 12R, причем эти виртуальные постоянные магниты 21 расположены вдоль окружности с заданным шагом P. В действительности количество первых и вторых якорей 21L, 21R первого и второго статоров 12L, 12R составляет 24, соответственно, а количество первых и вторых постоянных магнитов 52L, 52R внутреннего ротора 14 составляет 20, соответственно. Таким образом, шаг первых и вторых якорей 21L, 21R не совпадает с шагом P первых и вторых постоянных магнитов 52L, 52R внутреннего ротора 14.
Тем не менее, поскольку первые и вторые якоря 21L, 21R формируют вращающиеся магнитные поля, соответственно, первые и вторые якоря 21L, 21R могут быть заменены 20 единицами виртуальных постоянных магнитов 21, расположенных через шаг P и вращающихся по окружности. Первые и вторые якоря 21L, 21R далее обозначаются термином первые и вторые виртуальные магнитные полюса 21L, 21R виртуальных постоянных магнитов 21. Полярность первых и вторых виртуальных магнитных полюсов 21L, 21R виртуальных постоянных магнитов 21, примыкающих друг к другу вдоль окружности, поочередно меняются, и первые виртуальные магнитные полюса 21L, и вторые виртуальные магнитные полюса 21R виртуальных постоянных магнитов 21 смещены относительно друг друга вдоль окружности на половину шага, то есть на P/2.
Первые и вторые индукционные магнитные полюса 38L, 38R внешнего ротора 13 расположены между первыми и вторыми постоянными магнитами 52L, 52R и виртуальными постоянными магнитами 21. Первые и вторые индукционные магнитные полюса 38L, 38R расположены с шагом P вдоль окружности и расположены на одной линии с первыми индукционными магнитными полюсами 38L и вторыми индукционными магнитными полюсами 38R в направлении оси L.
Как показано на Фиг.12, когда полярность первого виртуального магнитного полюса 21L виртуального постоянного магнита 21 отличается от полярности противоположного (ближайшего) первого постоянного магнита 52L, полярность второго виртуального магнитного полюса 21R виртуального постоянного магнита 21 совпадает с полярностью противоположного (ближайшего) второго постоянного магнита 52R. Кроме того, когда полярность второго виртуального магнитного полюса 21R виртуального постоянного магнита 21 отличается от полярности противоположного (ближайшего) второго постоянного магнита 52R, полярность первого виртуального магнитного полюса 21L виртуального постоянного магнита 21 совпадает с полярностью противоположного (ближайшего) первого постоянного магнита 52L (см. Фиг.14(G)).
Сначала работа двигателя будет описана для случая, когда вращающееся магнитное поле генерируется на первом и втором статорах 12L, 12R (первых и вторых виртуальных магнитных полюсах 21L, 21R), чтобы приводить во вращение внешний ротор 13 (первые и вторые индукционные магнитные полюса 38L, 38R) в состоянии, когда внутренний ротор 14 (первые и вторые постоянные магниты 52L, 52R) неподвижен и не вращается. В этом случае виртуальные постоянные магниты 21 приводятся во вращение вниз по фигурам относительно неподвижных первых и вторых постоянных магнитов 52L, 52R в порядке Фиг.13(A), 13(B), 13(C), 13(D), 14(E), 14(F) и 14(G), посредством чего первые и вторые индукционные магнитные полюса 38L, 38R вращаются вниз по фигурам.
На Фиг.13(A) первые индукционные магнитные полюса 38L располагаются на одной линии относительно противоположных первых постоянных магнитов 52L и первых виртуальных магнитных полюсов 21L виртуальных постоянных магнитов 21, а вторые индукционные магнитные полюса 38R смещаются на половину шага P/2 относительно противоположных вторых виртуальных магнитных полюсов 21R и вторых постоянных магнитов 52R. В этом состоянии виртуальные постоянные магниты 21 вращаются вниз на Фиг.13(A). В начале вращения полярность первых виртуальных магнитных полюсов 21L виртуального постоянного магнита 21 отличается от полярности противоположных (ближайших) первых постоянных магнитов 52L, а полярность вторых виртуальных магнитных полюсов 21R виртуального постоянного магнита 21 совпадает с полярностью противоположных (ближайших) вторых постоянных магнитов 52R.
Поскольку первые индукционные магнитные полюса 38L расположены между первыми постоянными магнитами 52L и первыми виртуальными магнитными полюсами 21L виртуальных постоянных магнитов 21, первые индукционные магнитные полюса 38L намагничиваются первыми постоянными магнитами 52L и первыми виртуальными магнитными полюсами 21L, в результате чего между первыми постоянными магнитами 52L, первыми индукционными магнитными полюсами 38L и первыми виртуальными магнитными полюсами 21L генерируется первая магнитная линия G1. Аналогично, поскольку вторые индукционные магнитные полюса 38R расположены между вторыми виртуальными магнитными полюсами 21R и вторыми постоянными магнитами 52R, вторые индукционные магнитные полюса 38R намагничиваются посредством вторых виртуальных магнитных полюсов 21R и вторых постоянных магнитов 52R, благодаря чему между вторыми виртуальными магнитными полюсами 21R, вторыми индукционными магнитными полюсами 38R и вторыми постоянными магнитами 52R генерируется вторая магнитная линия G2.
В состоянии, показанном на Фиг.13(A), первая магнитная линия G1 генерируется таким образом, что она соединяет вместе первые постоянные магниты 52L, первые индукционные магнитные полюса 38L и первые виртуальные магнитные полюса 21L, тогда как вторая магнитная линия G2 генерируется таким образом, что она соединяет вместе каждые два вторых виртуальных магнитных полюса 21R, расположенных рядом друг с другом вдоль окружности, и вторые индукционные магнитные полюса 38R, расположенные между ними, а также она соединяет каждые два вторых постоянных магнита 52R, расположенных рядом друг с другом вдоль окружности, и вторые индукционные магнитные полюса 38R, расположенные между ними. В результате в этом состоянии устанавливается магнитный контур, как показано на Фиг.15(A). В этом состоянии магнитная сила для вращения по окружности не действует на первые индукционные магнитные полюса 38L, поскольку первая магнитная линия G1 имеет форму прямой линии. Кроме того, степень изгиба и общий магнитный поток двух вторых магнитных линий G2 равны друг другу во всех случаях, кроме магнитных линий G2 между каждыми двумя вторыми виртуальными магнитными полюсами 21R, расположенными рядом друг с другом вдоль окружности, и вторыми индукционными магнитными полюсами 38R, и степень изгиба и общий магнитный поток двух вторых магнитный линий G2 также равны друг другу во всех случаях, кроме магнитных линий между каждыми двумя вторыми постоянными магнитами 52R, расположенными рядом друг с другом вдоль окружности, и вторыми индукционными магнитными полюсами 38R, в результате чего устанавливается баланс. Соответственно, магнитная сила для вращения по окружности также не действует на вторые индукционные магнитные полюса 38R.
Когда виртуальные постоянные магниты 21 вращаются и переходят из положений, показанных на Фиг.13(A), в положения, показанные на Фиг.13(B), генерируется вторая магнитная линия G2, соединяющая вторые виртуальные магнитные полюса 21R, вторые индукционные магнитные полюса 38R и вторые постоянные магниты 52R, и первая магнитная линия G1 между первыми индукционными магнитными полюсами 38L и первыми виртуальными магнитными полюсами 21L изгибается. В результате данной операции первая и вторая магнитные линии G1 и G2 устанавливают магнитный контур, как показано на Фиг.15(B).
В этом состоянии, хотя первая магнитная линия G1 изогнута в небольшой степени, величина общего магнитного потока имеет большое значение, и, соответственно, относительно большая магнитная сила действует на первые индукционные магнитные полюса 38L. Таким образом, первые индукционные магнитные полюса 38L приводятся в движение посредством относительно большой движущей силы в направлении вращения виртуальных постоянных магнитов 21, то есть в направлении вращения магнитного поля. В результате внешний ротор 13 приводится во вращение в направлении вращения магнитного поля. Кроме того, хотя вторая магнитная линия G2 изогнута в большой степени, величина общего магнитного потока имеет небольшое значение, и, таким образом, относительно небольшая магнитная сила действует на вторые индукционные магнитные полюса 38R, в результате чего вторые индукционные магнитные полюса 38R приводятся во вращение посредством относительно небольшой движущей силы в направлении вращения магнитного поля. В результате внешний ротор 13 приводится во вращение в направлении вращения магнитного поля.
Далее, когда виртуальные постоянные магниты 21 вращаются и последовательно переходят из положений, показанных на Фиг.13(B), в положения, показанные на Фиг.13(C), 13(D), 14(E) и 14(F), первые индукционные магнитные полюса 38L и вторые индукционные магнитные полюса 38R приводятся в движение в направлении вращения магнитного поля посредством магнитной силы, вызываемой первой и второй магнитными линиями G1, G2, соответственно. В результате внешний ротор 13 приводится во вращение в направлении вращения магнитного поля. В течение этого процесса, хотя степень изгиба первой магнитной линии G1 становится все больше, общий магнитный поток становится все меньше, и, соответственно, магнитная сила, действующая на первые индукционные магнитные полюса 38L постепенно ослабевает, в результате чего движущая сила, приводящая в движение первые индукционные магнитные полюса 38L в направлении вращения магнитного поля, постепенно уменьшается. Кроме того, хотя степень изгиба второй магнитной линии G2 становится все меньше, общий магнитный поток становится все больше, и, соответственно, магнитная сила, действующая на вторые индукционные магнитные полюса 38R, постепенно усиливается, в результате чего движущая сила, приводящая в движение вторые индукционные магнитные полюса 38R в направлении вращения магнитного поля, постепенно увеличивается.
По мере вращения виртуальных постоянных магнитов 21 из положений, показанных на Фиг.14(E), в положения, показанные на Фиг.14(F), вторая магнитная линия G2 изгибается и общий магнитный поток достигает значения, близкого к наибольшему. В результате наибольшая магнитная сила действует на вторые индукционные магнитные полюса 38R, и движущая сила, действующая на вторые индукционные магнитные полюса 38R, принимает наибольшее значение. Далее, как показано на Фиг.14(G), виртуальный постоянный магнит 21 вращается с шагом P от исходного положения, показанного на Фиг.13(A), и первые и вторые виртуальные магнитные полюса 21L, 21R виртуального постоянного магнита 21 вращаются и переходят в положение, противоположное первым и вторым постоянным магнитам 52L, 52R, соответственно, в результате чего устанавливается состояние, где правая сторона и левая сторона на Фиг.13(A) меняются местами. Только в этот момент магнитная сила не действует для вращения внешнего ротора 13 по окружности.
В этом состоянии, когда виртуальный постоянный магнит 21 вращается дальше, первые и вторые индукционные магнитные полюса 38L, 38R приводятся в движение в направлении вращения магнитного поля посредством магнитной силы, вызываемой первой и второй магнитными линиями G1, G2, в результате чего внешний ротор 13 приводится во вращение в направлении вращения магнитного поля. В это время, когда виртуальный постоянный магнит 21 вращается дальше и снова возвращается в положение, показанное на Фиг.13(A), магнитная сила, действующая на первые индукционные магнитные полюса 38L, становится больше, в противоположность вышеописанному случаю, поскольку величина общего магнитного потока увеличивается, хотя степень изгиба первой магнитной линии G1 уменьшается, так что движущая сила, действующая на первые индукционные магнитные полюса 38L, становится больше. С другой стороны, магнитная сила, действующая на вторые индукционные магнитные полюса 38R, уменьшается, поскольку величина общего магнитного потока уменьшается, хотя степень изгиба второй магнитной линии G2 увеличивается, так что движущая сила, действующая на вторые индукционные магнитные полюса 38R, становится меньше.
Сравнивая Фиг.13(A) и Фиг.14(G), можно заметить, что вместе с вращением виртуального постоянного магнита 21 с шагом P, первые и вторые индукционные магнитные полюсы 38L, 38R вращаются только с половиной шага, то есть P/2. Следовательно, внешний ротор 13 вращается со скоростью, равной 1/2 скорости вращения вращающегося магнитного поля первого и второго статоров 12L, 12R. Это обусловлено тем, что первые и вторые индукционные магнитные полюса 38L, 38R приводятся во вращение под действием магнитной силы, вызываемой первой и второй магнитными линиями G1, G2, и между тем они остаются между первыми постоянными магнитами 52L и первыми виртуальными магнитными полюсами 21L, соединенными первой магнитной линией G1, и между вторыми постоянными магнитами 52R и вторыми виртуальными магнитными полюсами 21R, соединенными второй магнитной линией G2.
Ниже со ссылкой на Фиг.15 и 16 описана работа двигателя M, когда внутренний ротор 14 вращается, а внешний ротор 13 остается неподвижным.
Во-первых, как показано на Фиг.16(A), в состоянии, где каждый из первых индукционных магнитных полюсов 38L располагается напротив каждого из первых постоянных магнитов 52L и каждый из вторых индукционных магнитных полюсов 38R располагается между каждым из двух соседних вторых постоянных магнитов 52R, первое и второе вращающиеся магнитные поля вращаются вниз по Фиг.16(A). В начале вращения полярность каждого из первых виртуальных магнитных полюсов 21L устанавливается отличной от полярности каждого из противоположных первых постоянных магнитов 52L, и полярность каждого из вторых виртуальных магнитных полюсов 21R устанавливается такой же, как полярность каждого из противоположных вторых постоянных магнитов 52R.
В этом состоянии, когда виртуальные постоянные магниты 21 вращаются и переходят в положения, показанные на Фиг.16(B), первая магнитная линия G1 между первыми индукционными магнитными полюсами 38L и первыми виртуальными магнитными полюсами 21L изгибается, и вторые виртуальные магнитные полюса 21R приближаются ко вторым индукционным магнитным полюсам 38R. Следовательно, генерируется вторая магнитная линия G2, соединяющая вместе вторые виртуальные магнитные полюса 21R, вторые индукционные магнитные полюса 38R и вторые постоянные магниты 52R. В результате магнитный контур, показанный на Фиг.15(B), устанавливается из первых и вторых постоянных магнитов 52L, 52R, виртуальных постоянных магнитов 21 и первых и вторых индукционных магнитных полюсов 38L, 38R.
В этом состоянии, хотя величина общего магнитного потока первой магнитной линии G1 между первыми постоянными магнитами 52L и первыми индукционными магнитными полюсами 38L имеет большое значение, первая магнитная линия G1 имеет форму прямой, и, соответственно, магнитная сила для вращения первых постоянных магнитов 52L относительно первых индукционных магнитных полюсов 38L не генерируется. Кроме того, поскольку расстояние между вторыми постоянными магнитами 52R и вторыми виртуальными магнитными полюсами 21R, имеющими другую полярность, относительно большое, хотя величина общего магнитного потока второй магнитной линии G2 между вторыми индукционными магнитными полюсами 38R и вторыми постоянными магнитами 52R имеет относительно небольшое значение, степень изгиба имеет большое значение, и, соответственно, магнитная сила, приближающая вторые постоянные магниты 52R ко вторым индукционным магнитным полюсам 38R, действует на вторые постоянные магниты 52R. Следовательно, вторые постоянные магниты 52R приводятся в движение вместе с первыми постоянными магнитами 52L в направлении вращения виртуальных постоянных магнитов 21, то есть в направлении (верхняя сторона на Фиг.16(A)-16(D)), противоположном направлению вращения магнитного поля, и вращаются в направлении положений, показанных на Фиг.16(C). Вместе с этим вращением внутренний ротор 14 вращается в направлении, противоположном направлению вращения магнитного поля.
Несмотря на то что первые и вторые постоянные магниты 52L, 52R вращаются из положения, показанного на Фиг.16(B), в направлении положений, показанных на Фиг.16(C), виртуальные постоянные магниты 21 вращаются в направлении положения, показанного на Фиг.16(D). Как описано выше, когда вторые постоянные магниты 52R приближаются ко вторым индукционным магнитным полюсам 38R, степень изгиба второй магнитной линии G2 между вторыми индукционными магнитными полями 38R и вторыми постоянными магнитами 52R становится меньше, но величина общего магнитного потока второй магнитной линии G2 становится больше, когда виртуальные постоянные магниты 21 еще больше приближаются ко вторым индукционными магнитным полюсам 38R. В результате, как и в вышеописанном случае, магнитная сила, приближающая вторые постоянные магниты 52R ко вторым индукционным магнитным полюсам 38R, действует на вторые постоянные магниты 52R, в результате чего вторые постоянные магниты 52R приводятся в движение вместе с первыми постоянными магнитами 52L в направлении, противоположном направлению вращения магнитного поля.
Кроме того, когда первые постоянные магниты 52L вращаются в направлении, противоположном направлению вращения магнитного поля, первая магнитная линия G1 между первыми постоянными магнитами 52L и первыми индукционными магнитными полюсами 38L изгибается, и, следовательно, магнитная сила, приближающая первые постоянные магниты 52L к первым индукционным магнитным полюсам 38L, действует на первые постоянные магниты 52L. Тем не менее, в этом состоянии магнитная сила, вызываемая первой магнитной линией G1, слабее, чем магнитная сила, вызываемая второй магнитной линией G2, поскольку степень изгиба первой магнитной линии G1 меньше, чем степень изгиба второй магнитной линии G2. В результате вторые постоянные магниты 52R приводятся в движение вместе с первыми постоянными магнитами 52L в направлении, противоположном направлению вращения магнитного поля, посредством магнитной силы, соответствующей разности между упомянутыми двумя магнитными силами.
Как показано на Фиг.16(D), когда расстояние между первыми постоянными магнитами 52L и первыми индукционными магнитными полюсами 38L становится, по существу, равным расстоянию между вторыми индукционными магнитными полюсами 38R и вторыми постоянными магнитами 52R, величина общего магнитного потока и степень изгиба первой магнитной линии G1 между первыми постоянными магнитами 52L и первыми индукционными магнитными полюсами 38L становятся, по существу, равными величине общего магнитного потока и величине изгиба второй магнитной линии G2 между вторыми индукционными магнитными полюсами 38R и вторыми постоянными магнитами 52R, соответственно.
В результате магнитные силы, вызываемые первой и второй магнитными линиями G1, G2, по существу, становятся равными друг другу, и, соответственно, первые и вторые постоянные магниты 52L, 52R временно не приводятся в движение.
В этом состоянии, когда виртуальные постоянные магниты 21 вращаются и переходят в положения, показанные на Фиг.17(E), состояние генерации первой магнитной линии G1 меняется и устанавливается магнитный контур, показанный на Фиг.17(F). Следовательно, магнитная сила, вызываемая первой магнитной линией G1, практические не действует, чтобы приблизить первые постоянные магниты 52L к первым индукционным магнитным полюсам 38L, и, следовательно, посредством магнитной силы, вызываемой второй магнитной линией G2, вторые постоянные магниты 52R приводятся в движение вместе с первыми постоянными магнитами 52L в положение, показанное на Фиг.17(G), в направлении, противоположном направлению вращения магнитного поля.
Когда виртуальные постоянные магниты 21 немного поворачиваются из положения, показанного на Фиг.17(G), магнитная сила, вызываемая первой магнитной линией G1 между первыми постоянными магнитами 52L и первыми индукционными магнитными полюсами 38L, действует на первые постоянные магниты 52L, чтобы приблизить их к первым индукционным магнитным полюсам 38L, посредством чего первые постоянные магниты 52L приводятся в движение вместе со вторыми постоянными магнитами 52R в направлении, противоположном направлению вращения магнитного поля, и, следовательно, внутренний ротор 14 вращается в направлении, противоположном направлению вращения магнитного поля. Когда виртуальные постоянные магниты 21 поворачиваются дальше, первые постоянные магниты 52L приводятся в движение вместе со вторыми постоянными магнитами 52R в направлении, противоположном направлению вращения магнитного поля, посредством магнитной силы, соответствующей разности между магнитной силой, вызываемой первой магнитной линией G1 между первыми постоянными магнитами 52L и первыми индукционными магнитными полюсами 38L, и магнитной силой, вызываемой второй магнитной линией G2 между вторыми постоянными магнитами 52R и вторыми индукционными магнитными полюсами 38R. Далее, когда магнитная сила, вызываемая второй магнитной линией G2, практические не действует, чтобы приблизить вторые постоянные магниты 52R ко вторым индукционным магнитным полюсам 38R, первые постоянные магниты 52L приводятся в движение вместе со вторыми постоянными магнитами 52R посредством магнитной силы, вызываемой первой магнитной линией G1.
Как описано выше, вместе с вращением первого и второго магнитных полей, магнитная сила, вызываемая первой магнитной линией G1 между первыми постоянными магнитами 52L и первыми индукционными магнитными полюсами 38L, магнитная сила, вызываемая магнитной линией G2 между вторыми постоянными магнитами 52R и вторыми индукционными магнитными полюсами 38R, и магнитная сила, соответствующая разности между вышеупомянутыми магнитными силами, поочередно действуют на первые и вторые постоянные магниты 52L, 52R, то есть на внутренний ротор 14, в результате чего внутренний ротор 14 приводится во вращение в направлении, противоположном направлению вращения магнитного поля. Кроме того, магнитные силы, то есть движущие силы, действуют на внутренний ротор 14, тем самым обеспечивая постоянное значение крутящего момента внутреннего ротора.
В этом случае внутренний ротор 14 вращается на скорости, равной скоростям первого и второго вращающихся магнитных полей. Это обусловлено тем, что первые и вторые постоянные магниты 52L, 52R вращаются, тогда как первые и вторые индукционные магнитные полюса 38L, 38R остаются между первыми постоянными магнитами 52L и первыми виртуальными магнитными полюсами 21L и между вторыми постоянными магнитами 52R и вторыми виртуальными магнитными полюсами 21R, соответственно, благодаря действию магнитных сил, вызываемых первыми и вторыми магнитными линиями G1, G2.
Выше были по отдельности описаны случаи, когда внутренний ротор 14 неподвижен и внешний ротор 13 вращается в направлении вращения магнитного поля, и когда внешний ротор 13 неподвижен и внутренний ротор 14 вращается в направлении, противоположном направлению вращения магнитного поля, однако очевидно, что внутренний ротор 14 и внешний ротор 13 могут вращаться во взаимно противоположных направлениях.
Как описано выше, когда один из внутреннего ротора 14 и внешнего ротора 13 или оба этих ротора вращаются, они могут вращаться без скольжения, чтобы повысить эффективность, между тем функционируя как синхронные машины, поскольку состояния намагничивания первых и вторых индукционных магнитных полюсов 38L, 38R меняются согласно относительным положениям вращения внутреннего ротора 14 и внешнего ротора 13. Кроме того, поскольку количества первых виртуальных магнитных полюсов 21L, первых постоянных магнитов 52L и первых индукционных магнитных полюсов 38L устанавливаются равными друг другу, и количества вторых виртуальных магнитных полюсов 21R, вторых постоянных магнитов 52R и вторых индукционных полюсов 38R устанавливаются равными друг другу, обеспечивается возможность получить достаточный крутящий момент двигателя M, независимо от того, вращается ли внутренний ротор 14 или внешний ротор 13.
Так согласно двигателю M настоящего варианта осуществления, поскольку внешний ротор 13 поддерживает за свои противоположные концы корпусом 11 через первый вал 34 внешнего ротора, предусмотренный в корпусе 31 ротора, и второй вал 36 внешнего ротора, предусмотренный в крышке 33 ротора, обеспечивается возможность стабильного вращения внешнего ротора 13.
Кроме того, поскольку внешний ротор 13 поддерживается с возможностью вращения корпусом 11 через пару шарикоподшипников 35, 37, а внутренний ротор 13 поддерживается с возможностью вращения внешним ротором 14 через пару шарикоподшипников 50, 51, расположенных между вышеупомянутой парой шарикоподшипников 35, 37, размер двигателя M в направлении оси L может быть сокращен по сравнению со случаем, когда внешний ротор 13 и внутренний ротор 11 поддерживаются с возможностью вращения непосредственно корпусом 11, соответственно.
Это обусловлено тем, что шарикоподшипники 50, 51 не могут быть размещены между парой шарикоподшипников 35, 37 внешнего ротора 13, когда внутренний ротор 14 непосредственно поддерживается корпусом 11 через пару шарикоподшипников 50, 51, и они должны быть размещены в некотором положении снаружи относительно пары шарикоподшипников 35, 37 внешнего ротора 13 в направлении оси L.
Кроме того, поскольку первый датчик 42 положения, для детектирования положения вращения внешнего ротора 13, и второй датчик 56 положения, для детектирования положения вращения внутреннего ротора 14, компактно расположены вместе на одном конце в направлении оси L, то есть на части 17 крышки корпуса 11, обеспечивается возможность одновременного выполнения таких операций, как осмотр, ремонт, сборка и замена первого и второго датчиков 42, 56 положения только путем снятия части 17 крышки, что существенно повышает удобство. Более того, облегчается обслуживание электропроводки первого и второго датчиков 42, 56 положения.
Во внешнем роторе 13, поскольку внешняя круглая и внутренняя круглая поверхности первого и второго индукционных магнитных полюсов 38L, 38R открыты на внешней круглой поверхности и внутренней круглой поверхности корпуса 31 ротора, соответственно, воздушный зазор α внутреннего ротора 13 относительно первого и второго статоров 12L, 12R и воздушный зазор β внутреннего ротора 14 относительно первого и второго сердечников 48L, 48R могут быть минимизированы, что повышает магнитную эффективность.
Более того, поскольку первые индукционные магнитные полюса 38L и вторые индукционные магнитные полюса 38R расположены с одинаковой фазой вдоль окружности, структура корпуса 31 ротора внешнего ротора, поддерживающего первые и вторые индукционные магнитные полюса 38L, 38R, упрощается по сравнению с компоновкой первых и вторых индукционных магнитных полюсов 38L, 38R с разными фазами вдоль окружности, а также повышается надежность корпуса 31 ротора.
В частности, поскольку поддержка первых и вторых индукционных магнитных полюсов 38L, 38R и прокладок 39 относительно корпуса 31 ротора обеспечивается путем сцепления углублений первых и вторых индукционных магнитных полюсов 38L, 38R и углублений 38a, 38a, 39a, 39b прокладки 39 при их вставке в направлении оси L относительно выступов 31b, 31b щели 31a корпуса 31 ротора, процесс сборки упрощается, а также устраняется необходимость в выделенных средствах крепления, таких как болты, что способствует уменьшению количества деталей и упрощению конструкции. Более того, обеспечивается возможность эффективного предотвращения отсоединения первых и вторых индукционных магнитных полюсов 38L, 38R и прокладки 39 в радиальном направлении из-за центробежной силы, генерируемой при вращении внешнего ротора 13.
Боле того, углубления 38a сформированы в первых и вторых индукционных магнитных полюсах 38L, 38R, и ненужные части первых и вторых индукционных магнитных полюсов 38L, 38R удаляются, что уменьшает потери на вихревые токи и гистерезис.
Как показано на Фиг.11, в случае, когда магнитный поток проходит от первого якоря 21L первого статора 12L к постоянному магниту 52L внутреннего ротора 14 через первый индукционный магнитный полюс 38L внешнего ротора 13, если первый индукционный магнитный полюс 38L находится в позиции, обозначенной пунктирной линией, то магнитный поток замыкается накоротко от первого постоянного магнита 52L через первый индукционный магнитный полюс 38L к соседнему первому постоянному магниту 52L, что снижает магнитную эффективность. Эта проблема также возникает на вторых якорях 21R, вторых постоянных магнитах 52R и вторых индукционных магнитных полюсах 38R.
Для решения этой проблемы в настоящем варианте осуществления, как показано на Фиг.10, угол θ2, формируемый двумя прямыми линиями, проходящими от оси L к противоположным концам вдоль окружности первых и вторых индукционных магнитных полюсов 38L, 38R, устанавливается меньшим, чем механический угол θ0, соответствующий электрическому углу 180° первого и второго постоянных магнитов 52L, 52R. θ1 представляет собой угол, формируемый двумя прямыми линиями, проходящими от оси L к противоположным, вдоль окружности, концам первых и вторых постоянных магнитов 52L, 52R, и между упомянутыми тремя углами действует следующая связь θ0>θ1≥θ2. Таким образом, предоставляется возможность минимизировать магнитное короткое замыкание между двумя первыми постоянными магнитами 52L, 52L, расположенными рядом друг с другом вдоль окружности, или магнитное короткое замыкание между двумя вторыми постоянными магнитами 52R, 52R, расположенными рядом друг с другом вдоль окружности.
Второй вариант осуществления
Ниже со ссылкой на Фиг.18 описан второй вариант осуществления настоящего изобретения.
В первом варианте осуществления форма углублений 38a, 39a первых и вторых индукционных магнитных полюсов 38L, 38R и прокладки 39, а также форма выступов 31b щелей 31a в корпусе ротора являются квадратными, но такой же эффект может быть достигнут посредством треугольной формы, как показано на Фиг.18(A), или U-образной формы, как показано на Фиг.18(B).
Дополнительно первые и вторые индукционные магнитные полюсы 38L, 38R могут надежно поддерживаться путем реверсирования позиционного соотношения углублений 38a, 39a и выступов 31b, формируя выступы на стороне первых и вторых индукционных магнитных полюсов 38L, 38R и прокладке 39, и формируя углубления на стороне щелей 31a. Тем не менее, если углубления 38a сформированы на стороне первых и вторых индукционных магнитных полюсов 38L, 38R, как в описанных вариантах осуществления, потери на вихревые токи и гистерезис могут быть снижены, по сравнению со случаем, когда углубления сформированы на стороне щелей 31a.
Третий вариант осуществления
Ниже со ссылкой на Фиг.19-21 описан третий вариант осуществления настоящего изобретения.
В третьем варианте осуществления на поверхности прокладок 39 внешнего ротора 13 сформированы пазы 39b, проходящие вдоль окружности, во внешней круглой поверхности корпуса 31 ротора внешнего ротора 13 сформированы пазы 31d, ведущие к пазам 39b прокладок 39, и в пазы 39b, 31d вставлено кольцо 59, изготовленное из слабомагнитного материала.
Когда внешний ротор 13 вращается, центробежная сила действует на первые и вторые индукционные магнитные полюсы 38L, 38R и прокладку 39, и средняя часть корпуса 31 ротора в направлении оси L выпукло деформируется. Тем не менее, средняя часть корпуса 31 ротора в направлении оси L прижимается кольцом 59, в результате чего деформация предотвращается.
Четвертый вариант осуществления
Ниже со ссылкой на Фиг.22 описан четвертый вариант осуществления настоящего изобретения.
В четвертом варианте осуществления первый постоянный магнит 52L или второй постоянный магнит 52R, образующий один магнитный полюс внутреннего ротора 14, разделяется на две части. В этом случае для того, чтобы два постоянных магнита образовали один магнитный полюс, необходимо чтобы полярности этих двух постоянных магнитов совпадали.
В этом случае угол θ0, соответствующий электрическому углу 180° магнитного полюса во внутреннем роторе 14, определяется как угол, формируемый двумя радиальными линиями, проходящими между соседними парами, когда два постоянных магнитов 52L, 52L (или 52R, 52R), образующих один магнитный полюс, формирует пару.
Пятый вариант осуществления
Ниже со ссылкой на Фиг.23 описан пятый вариант осуществления настоящего изобретения.
В вышеописанных вариантах осуществления с первого по четвертый настоящее изобретение применяется к двигателю M вращающегося типа, но в пятом варианте осуществления настоящее изобретение применяется двигателю M линейного движения (линейному двигателю).
В этом случае, как показано на Фиг.12, линейный ряд индукционных магнитных полюсов, формируемый первыми и вторыми индукционными магнитными полюсами 38L, 38R, располагается между линейным первым рядом магнитных полюсов, содержащим первые и вторые якоря 21L, 21R, и линейным вторым рядом магнитных полюсов, содержащим первые и вторые постоянные магниты 52L, 52R. Таким образом, если электрическая энергия прикладывается к первым и вторым якорям 21L, 21R, чтобы генерировать движущееся магнитное поле в первом ряде магнитных полюсов, то один или оба из второго ряда магнитных полюсов и ряда индукционных магнитных полюсов может двигаться в линейном направлении.
Далее, как показано на Фиг.23, расстояние L2 между противоположными концами в линейном направлении между первыми и вторыми индукционными магнитными полюсами 38L, 38R ряда индукционных магнитных полюсов устанавливается равным величине, которая меньше, чем расстояние L0, соответствующее электрическому углу 180° первых и вторых постоянных магнитов 52L, 52R второго ряда магнитных полюсов, посредством чего предоставляется возможность подавлять магнитное короткое замыкание между первыми постоянными магнитами 52L (или вторыми постоянными магнитами 52R), расположенными рядом друг с другом в линейном направлении, через первые индукционные магнитные полюса 38L (или вторые индукционные магнитные полюса 38R) ряда индукционных магнитных полюсов, в результате чего повышается магнитная эффективность.
Шестой вариант осуществления
Ниже со ссылкой на Фиг.24 и 25 описан шестой вариант осуществления настоящего изобретения.
В шестом варианте осуществления настоящее изобретение применяется к электромагнитной муфте, в которой первые и вторые статоры 12L, 12R снабжены первыми и вторыми постоянными магнитами 60L, 60R вместо первых и вторых якорей 21L, 21R. Когда один из внутреннего ротора 14 и внешнего ротора 13 приводится в движение, если первый и второй статоры 12L, 12R неподвижны, то другой ротор вращается соответствующим образом, тем самым, формируя механизм передачи мощности. Если внутренний ротор 14 неподвижен, то движущая сила может передаваться между первыми и вторыми статорами 12L, 12R и внешним ротором 13; если неподвижен внешний ротор 13, то движущая сила может передаваться между первым и вторым статорами 12L, 12R и внутренним ротором; а если все три компонента вращаются, то они могут функционировать как дифференциальное устройство.
Кроме того, в настоящем варианте осуществления, как показано на Фиг.25(A), угол θ0, соответствующий электрическому углу 180° первых и вторых постоянных магнитов 52L, 52R внутреннего ротора 14, устанавливается таким образом, что относительно угла θ2, формируемого двумя прямыми линиями, проходящими от оси L к противоположным концам первых и вторых индукционных магнитных полюсов 38L, 38R вдоль окружности, и угла θ1, формируемого двумя прямыми линиями, проходящими от оси L к противоположным концам первых и вторых постоянных магнитов 52L, 52R вдоль окружности, устанавливается отношение θ0<θ1≤θ2.
Аналогично, как показано на Фиг.25(B), угол θ0, соответствующий электрическому углу 180° первых и вторых постоянных магнитов 60L, 60R первого и второго статоров 12L, 12R, устанавливается таким образом, что относительно угла θ2, формируемого двумя прямыми линиями, проходящими от оси L к противоположным концам первых и вторых индукционных магнитных полюсов 38L, 38R вдоль окружности, и угла θ1, формируемого двумя прямыми линиями, проходящими от оси L к противоположным концам первых и вторых постоянных магнитов 60L, 60R вдоль окружности, устанавливается отношение θ0<θ1≤θ2.
Выше были описаны примеры осуществления настоящего изобретения, однако в рамках сущности настоящего изобретения могут быть выполнены различные изменения.
Например, в вышеописанных вариантах осуществления проиллюстрированы двигатель M и электромагнитная муфта, однако настоящее изобретение применимо к двигателю, который генерирует электродвижущую силу на статоре путем фиксирования одного из внутреннего ротора и внешнего ротора, и вращения другого.
Кроме того, в описанных вариантах осуществления якоря 21L, 21R предусмотрены в статорах 12L, 12R, расположенных снаружи в радиальном направлении, а постоянные магниты 52L, 52R предусмотрены во внутреннем роторе 14, расположенном внутри в радиальном направлении, однако их взаимное расположение может быть обратным, так что статор с якорями 21L, 21R может быть расположен внутри в радиальном направлении, а внешний ротор с постоянными магнитами 52L, 52R может быть расположен снаружи в радиальном направлении.
В описанных вариантах осуществления статоры 12L, 12R, внешний ротор 13 и внутренний ротор 14 расположены в радиальном направлении (радиальной компоновке), однако они могут быть расположены в направлении оси L. То есть статоры с якорями и роторы с постоянными магнитами могут быть расположены на противоположных сторонах в направлении оси L ротора с индукционными магнитными полюсами (осевая компоновка).
Дополнительно в описанных вариантах осуществления статоры 12L, 12R намотаны сосредоточенным образом, однако обмотки также могут быть распределенного типа.
Дополнительно полярные логарифмы первого и второго статоров 12L, 12R, внешнего ротора 13 и внутреннего ротора 14 не ограничиваются описанными вариантами осуществления, и они могут быть соответствующим образом изменены.
Пояснение ссылочных обозначений и символов
12L первый статор (статор)
12R второй статор (статор)
13 внешний ротор (ротор, второй ротор)
14 внутренний ротор (первый ротор)
21L первый якорь (магнитный полюс первого ряда магнитных полюсов, якорь)
21R второй якорь (магнитный полюс второго ряда магнитных полюсов, якорь)
31 корпус ротора
31a щель
31b выступ
33 крышка ротора
34 первый вал внешнего ротора (вращающийся вал)
36 второй вал внешнего ротора (вращающийся вал)
38L первый индукционный магнитный полюс (индукционный магнитный полюс)
38R второй индукционный магнитный полюс (индукционный магнитный полюс)
38a углубление
39 прокладка
41 держатель
52L первый постоянный магнит (магнитный полюс второго ряда магнитных полюсов)
52R второй постоянный магнит (магнитный полюс второго ряда магнитных полюсов)
59 кольцо
L ось
L0 расстояние
L2 расстояние
θ0 угол машины
θ2 угол
P заданный шаг
| название | год | авторы | номер документа |
|---|---|---|---|
| СРЕДСТВО СТЕРЕОПРОСМОТРА | 2015 |
|
RU2677932C1 |
| ИНДУКТОРНОЕ СИНХРОННОЕ УСТРОЙСТВО | 2005 |
|
RU2361350C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2009 |
|
RU2454774C9 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2354030C2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2008 |
|
RU2375807C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД, СОДЕРЖАЩИЙ БОЛЕЕ ОДНОГО ВОЗБУЖДАЕМОГО ПОСТОЯННЫМ МАГНИТОМ РОТОРА (ВАРИАНТЫ), И БРИТВА | 1996 |
|
RU2154885C2 |
| МНОГОФАЗНОЕ СТАТОРНОЕ УСТРОЙСТВО | 2010 |
|
RU2557562C2 |
| МАШИНА С ОСЕВЫМ МАГНИТНЫМ ПОТОКОМ | 2016 |
|
RU2689983C2 |
| Бесщеточная электрическая машина постоянного тока дискового типа | 1982 |
|
SU1494877A3 |
| ТЯГОВЫЙ ПРИВОД ДЛЯ ЛИФТА | 2007 |
|
RU2425791C2 |
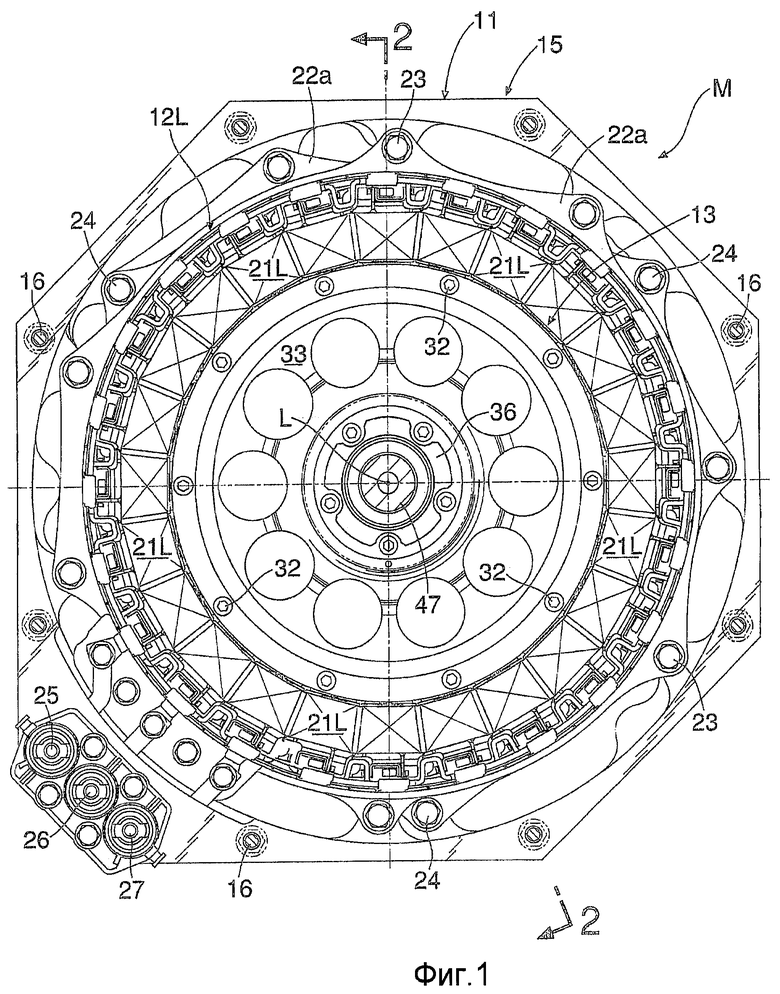
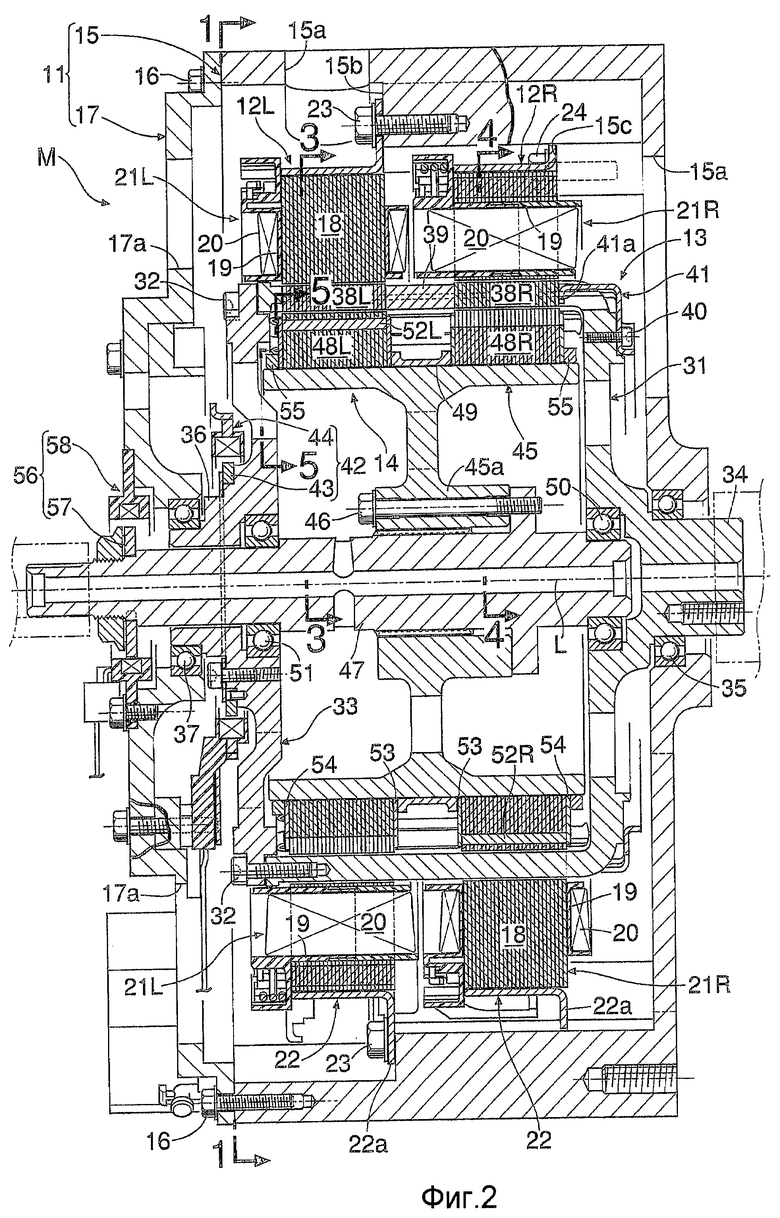
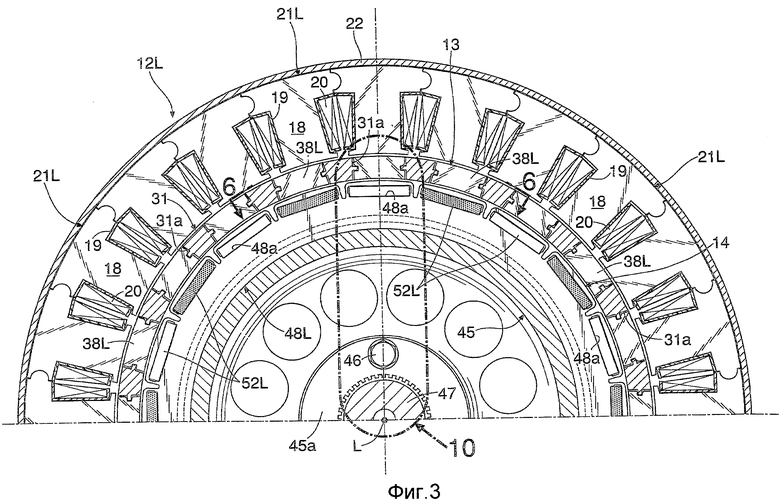
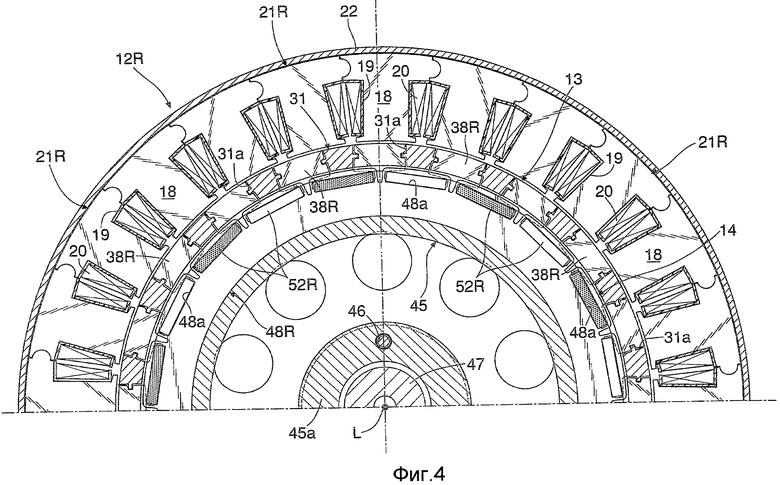
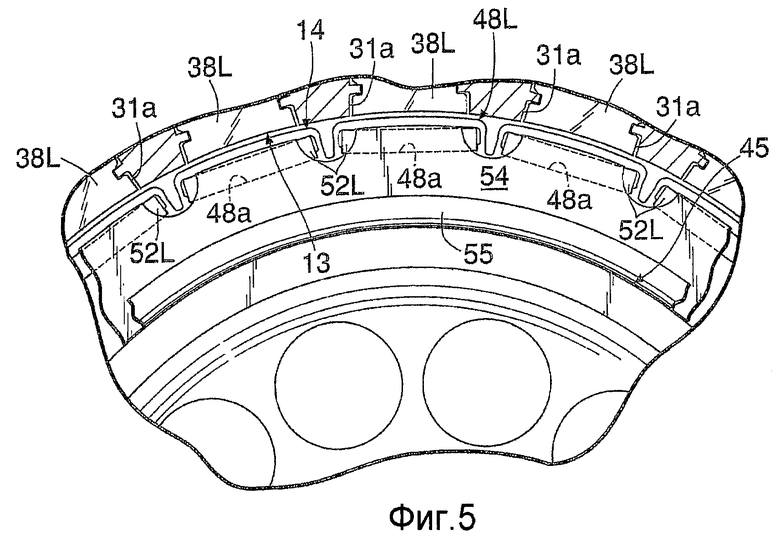
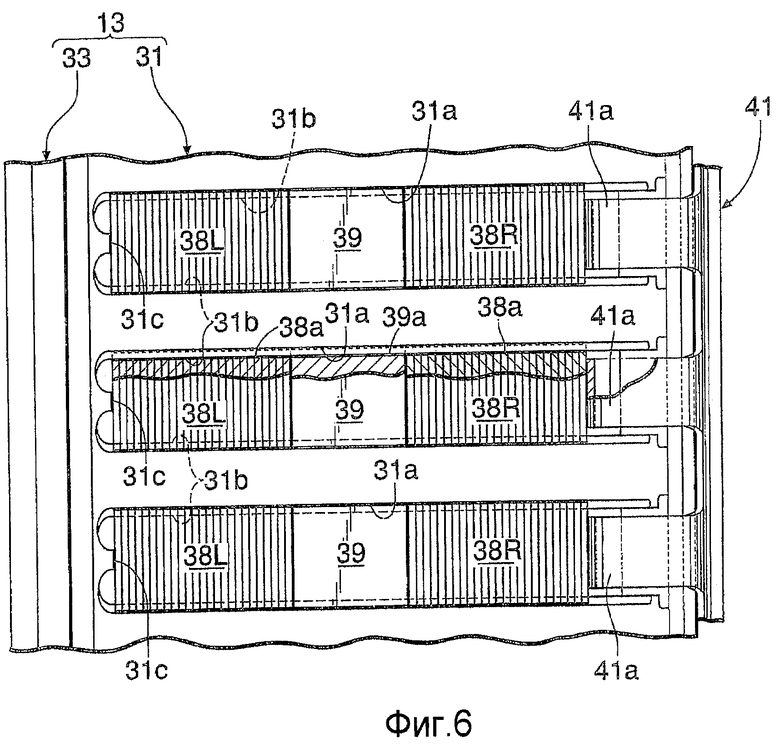
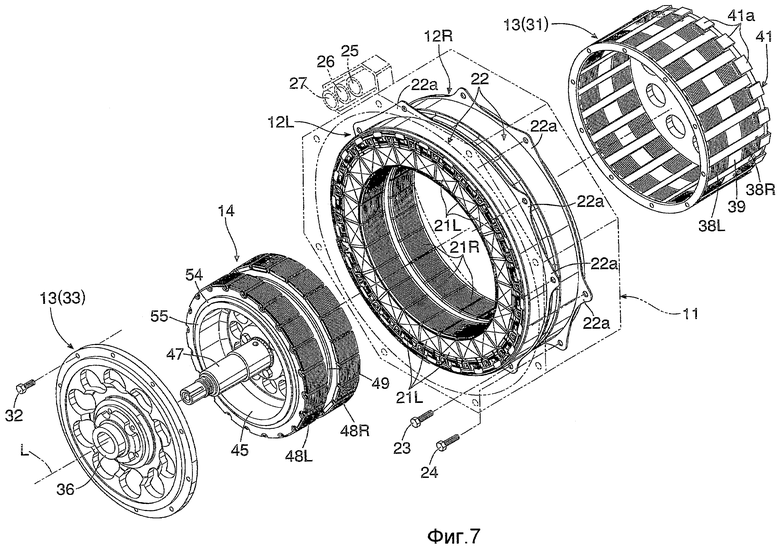
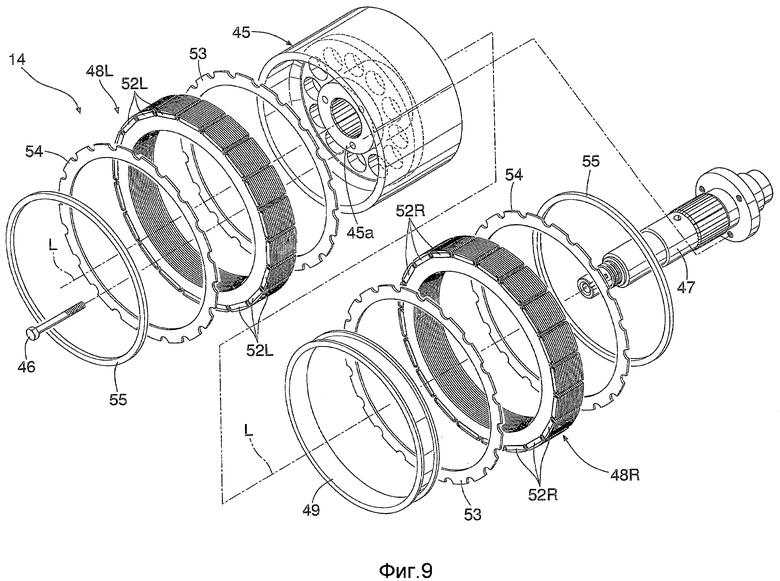
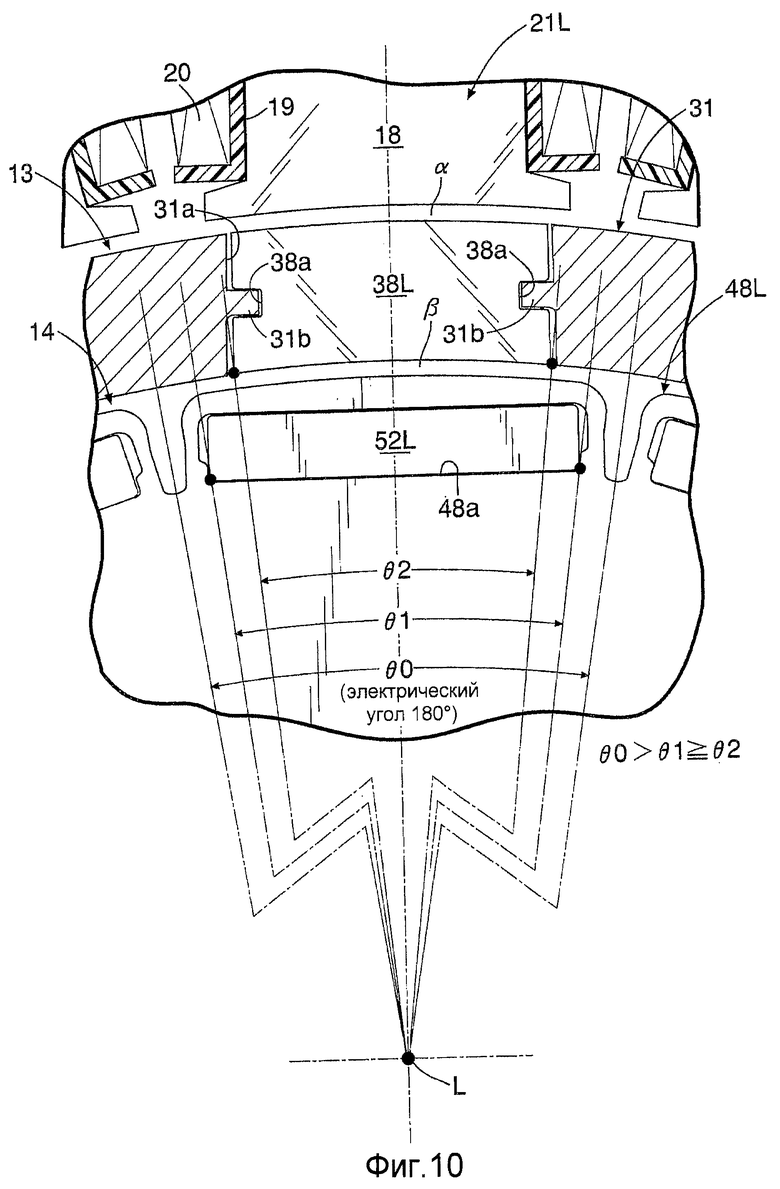
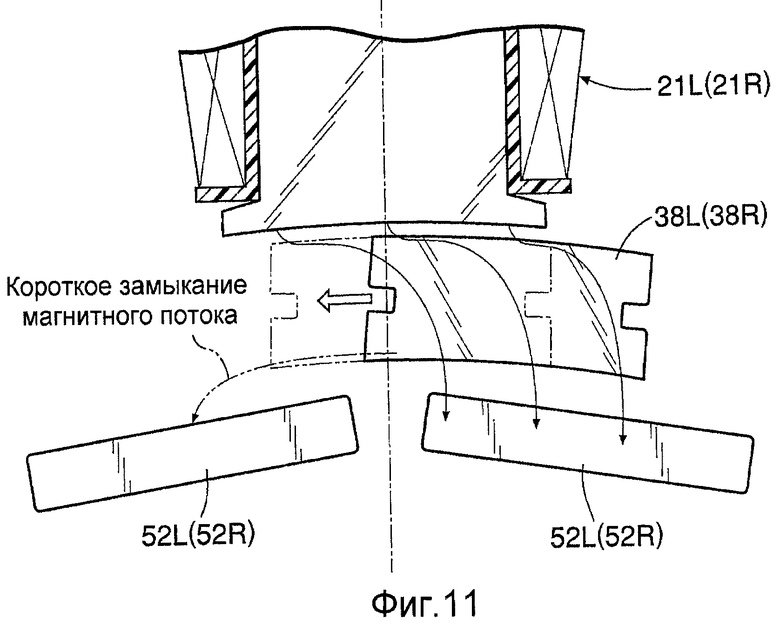
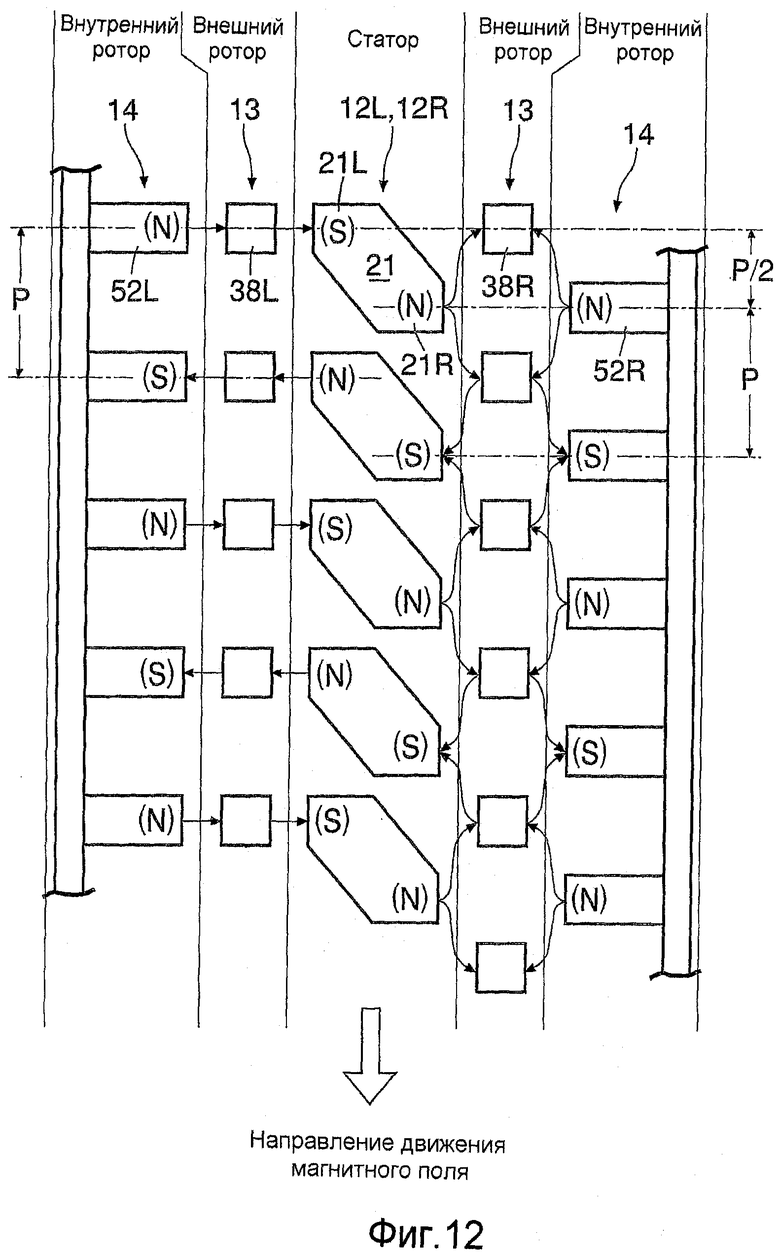
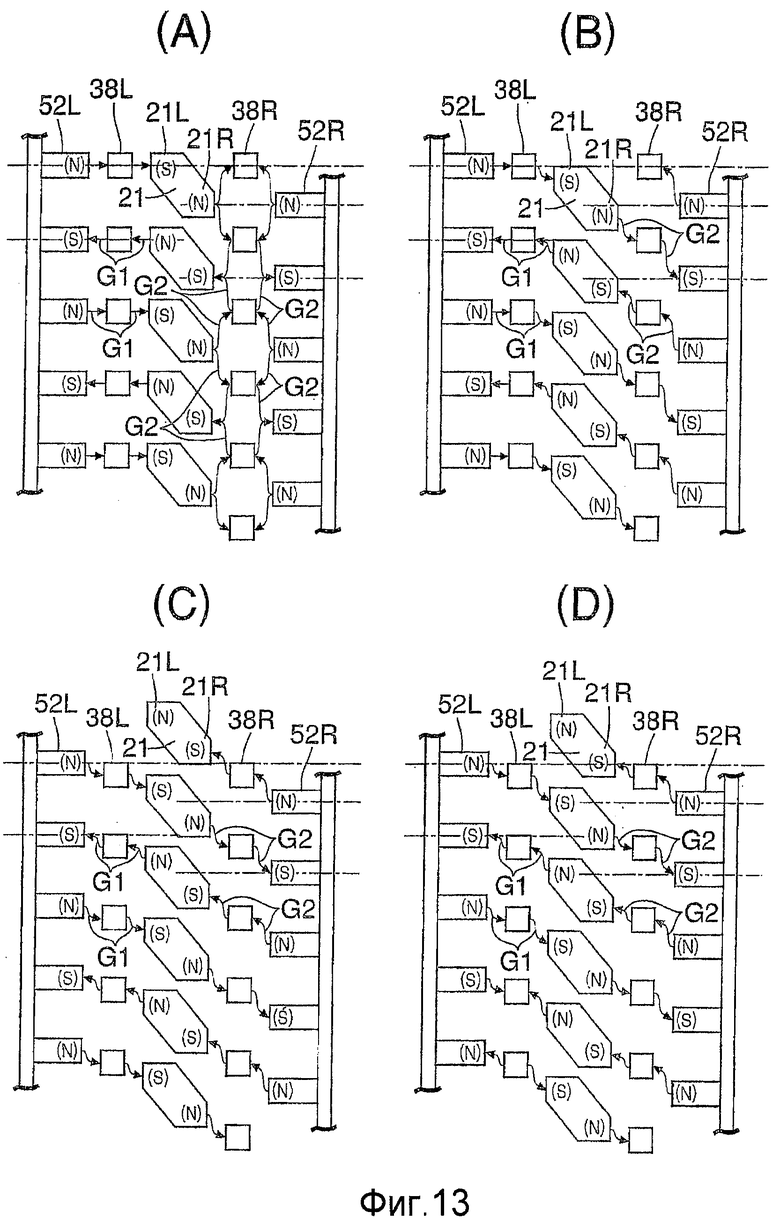
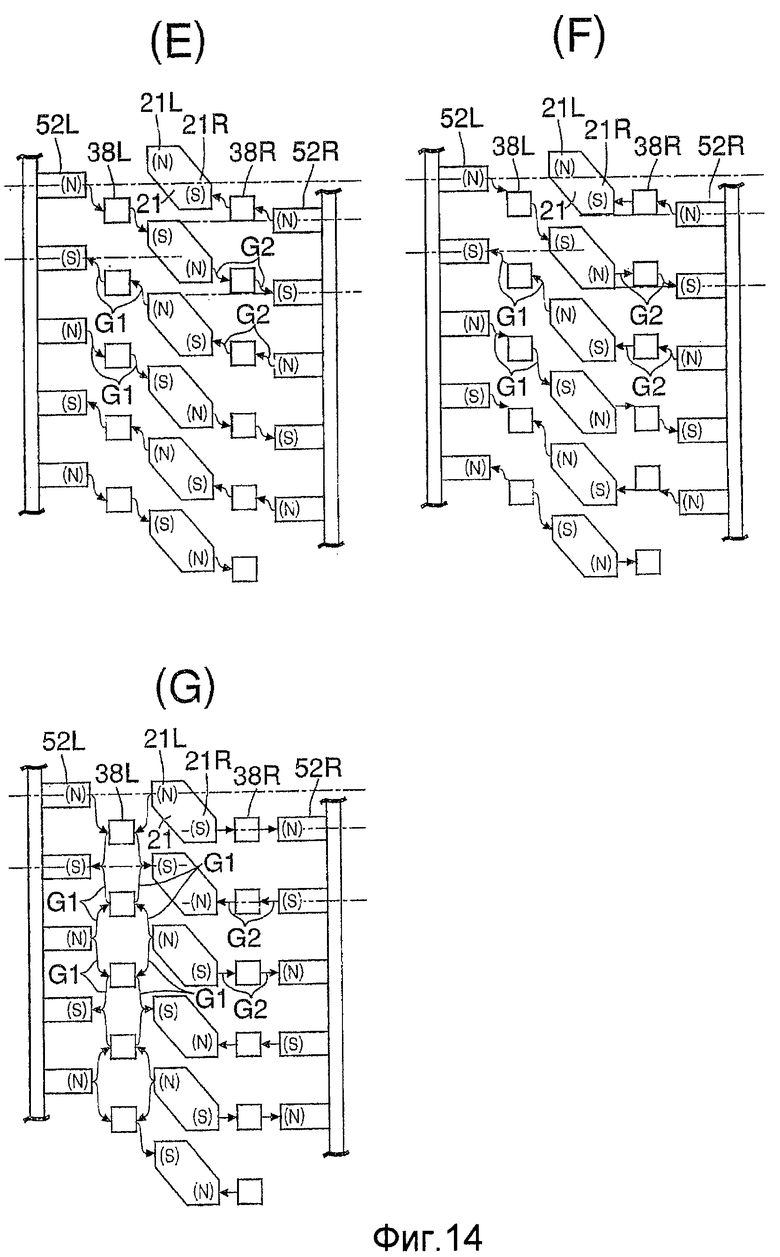
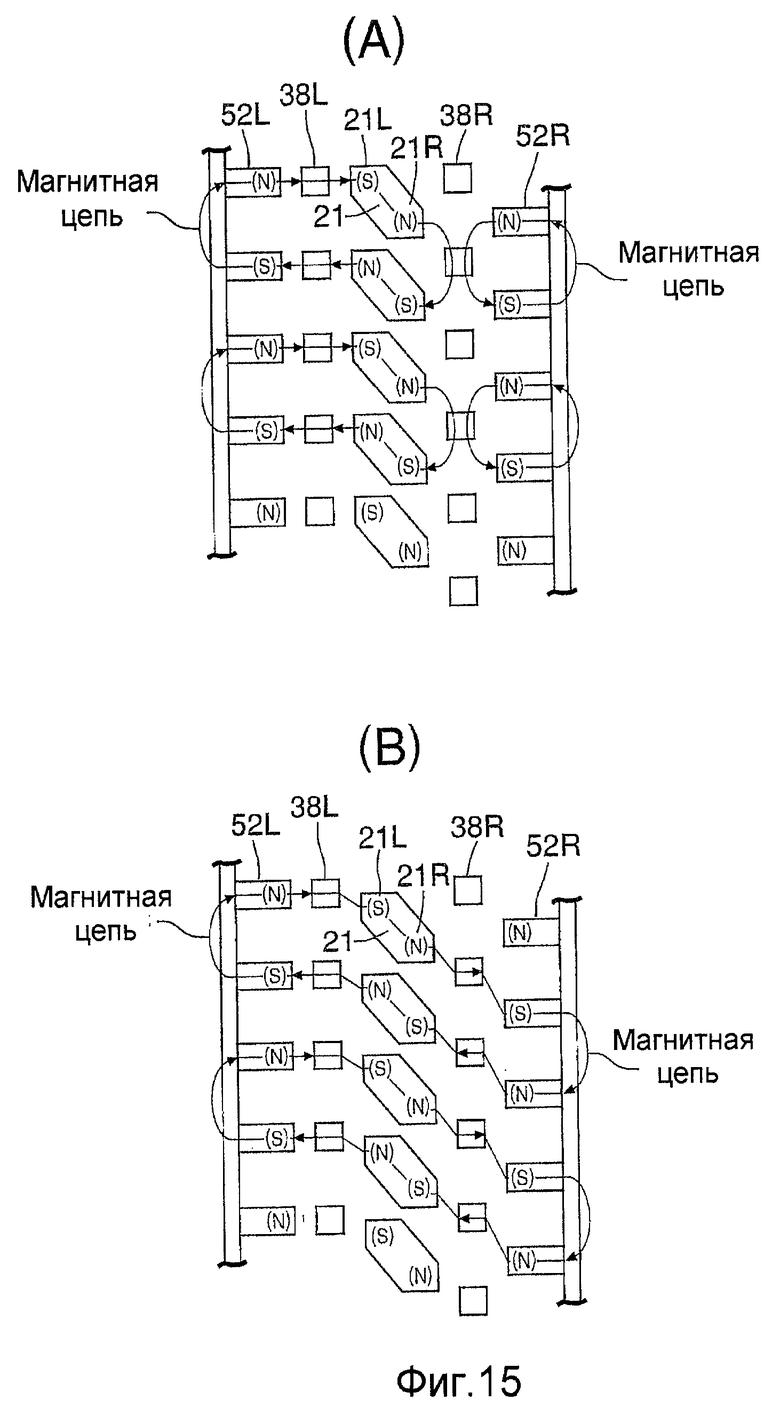
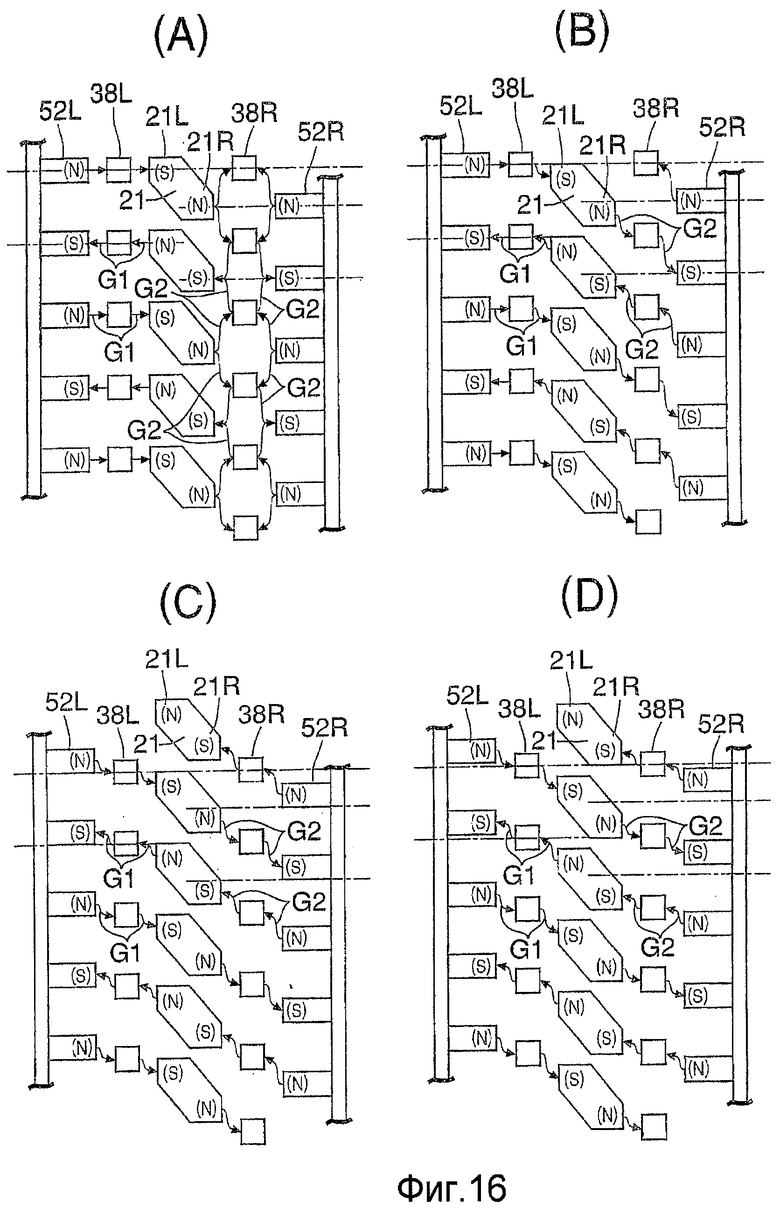
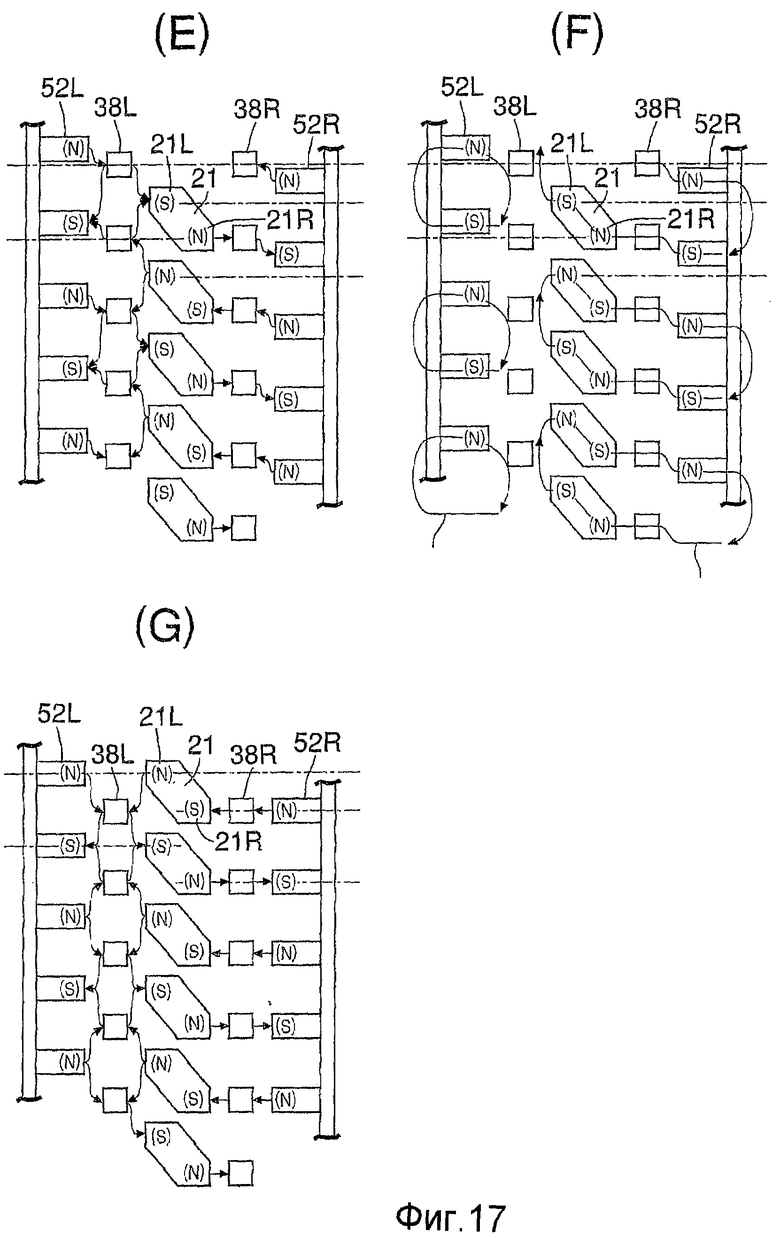
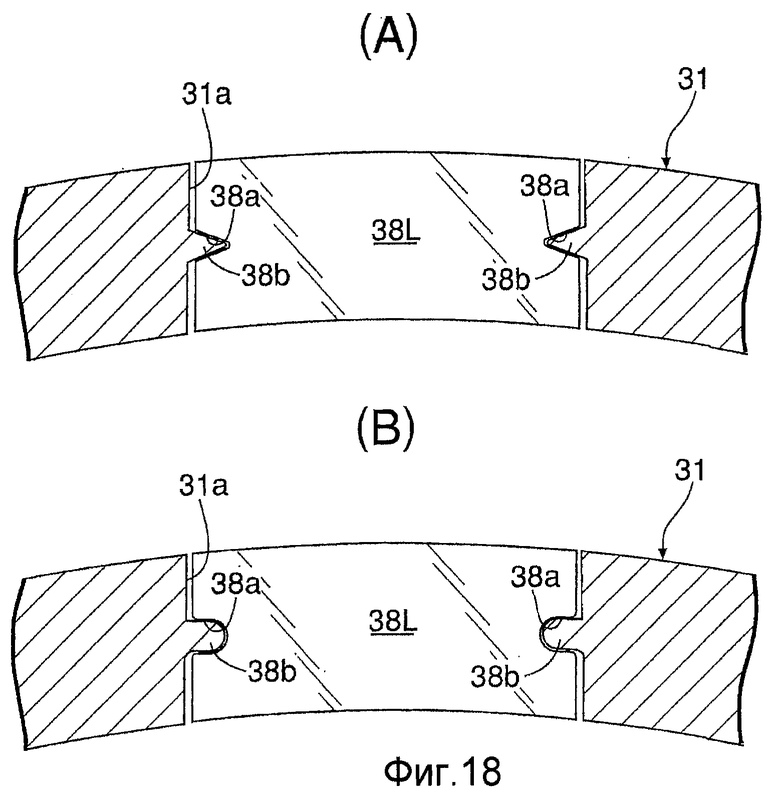
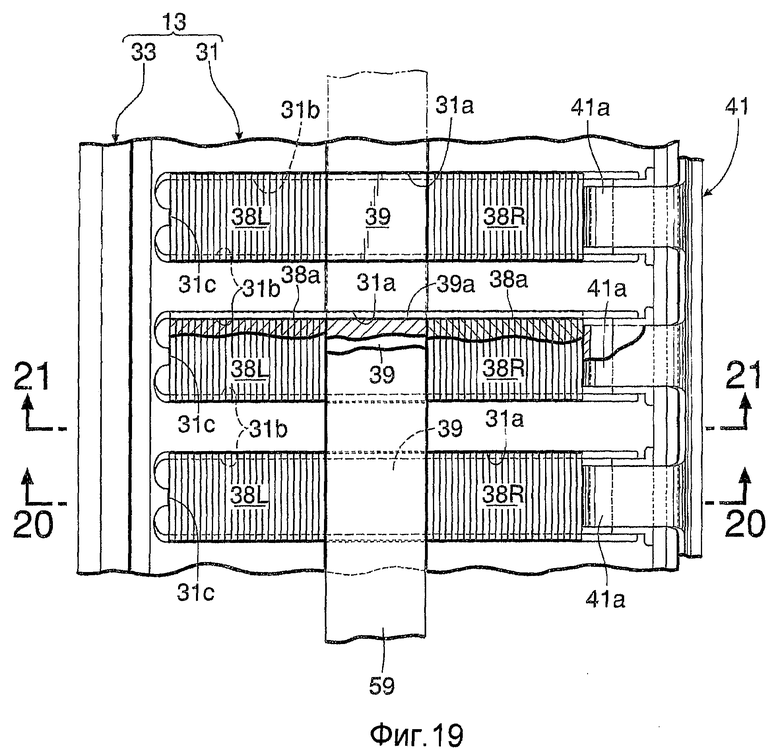
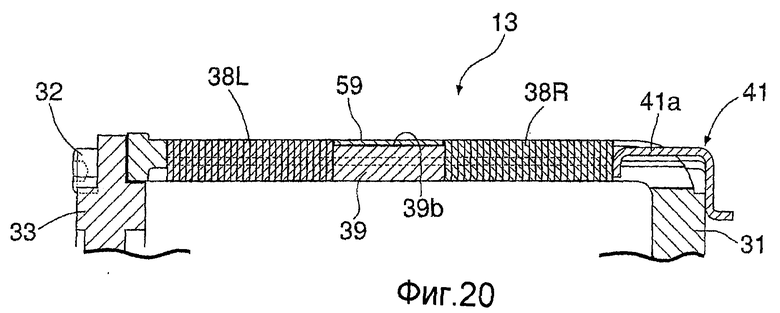
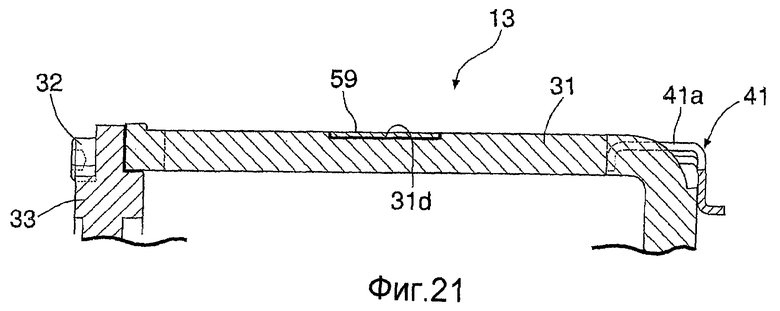
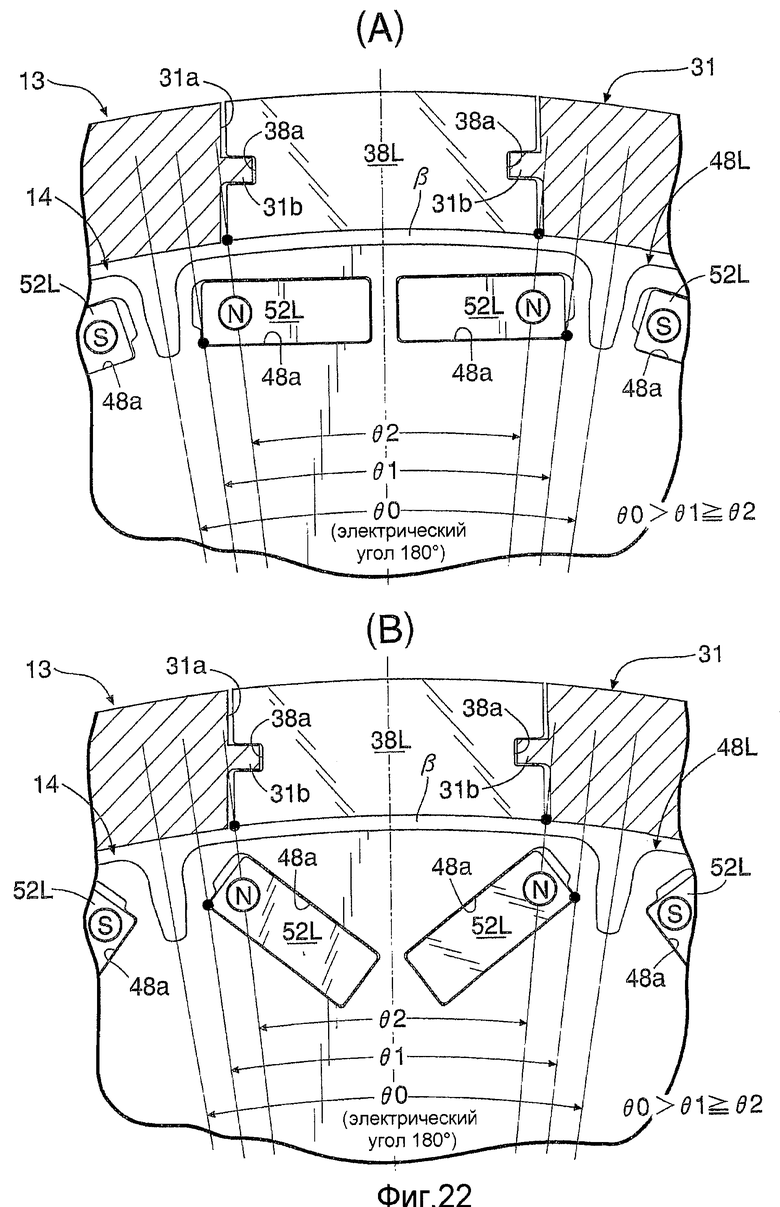
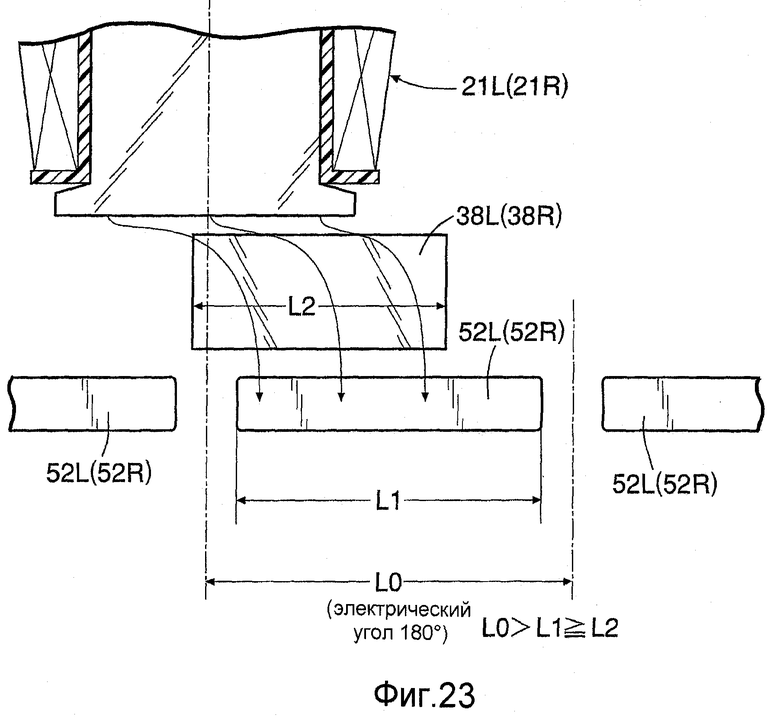
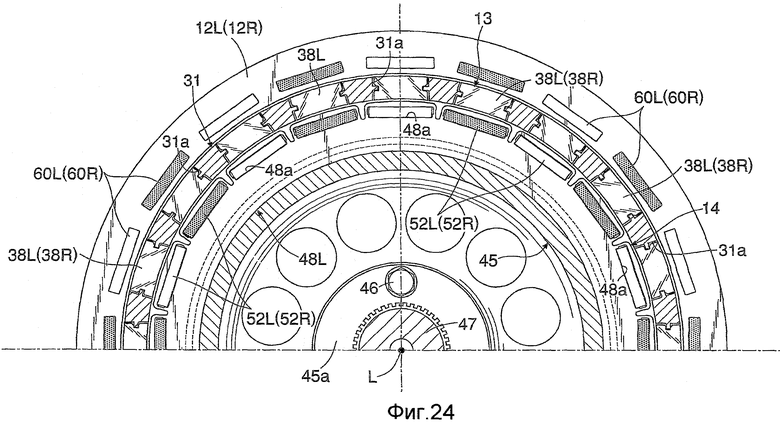
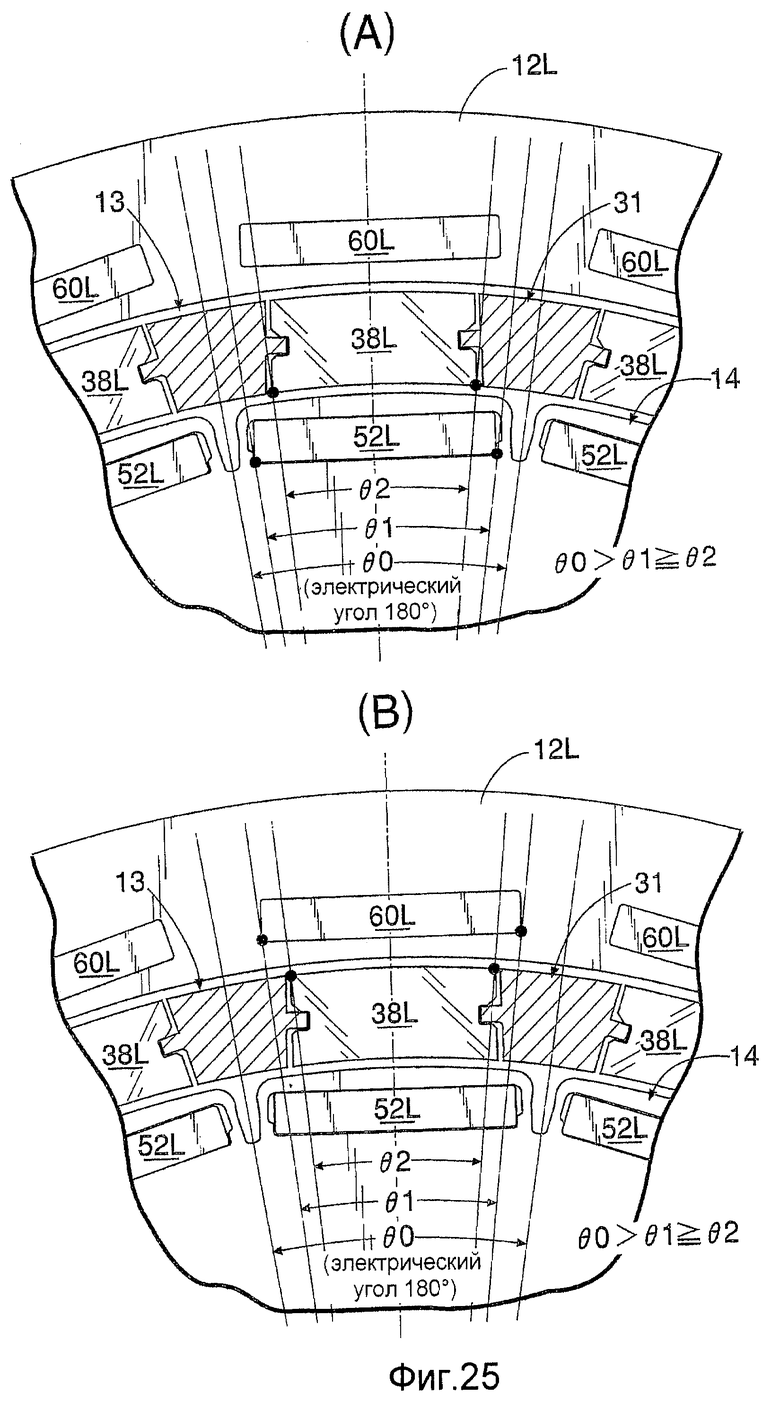
Изобретение относится к области электротехники и касается особенностей конструктивного выполнения вращающихся электрических машин, в частности двигателей, содержащих кольцеобразные статоры, расположенные вокруг оси, и два ротора, вращающиеся вокруг указанной оси. Технический результат, достигаемый при использовании предлагаемых изобретений группы, состоит в упрощении структуры ротора, поддерживающего индукционные магнитные полюсы, а также в повышении надежности вращающейся электрической машины, в частности двигателя. Предлагаемый двигатель включает статор с первыми и вторыми якорями, которые формируют вращающееся магнитное поле, внутренний ротор с первыми и вторыми постоянными магнитами, и внешний ротор (13), расположенный между статором и внутренним ротором. Внешний ротор (13) содержит корпус (31) ротора, который поддерживает первые и вторые индукционные магнитные полюсы (38L, 38R), изготовленные из слабомагнитного материала таким образом, что они вставляются в корпус ротора. Фаза первого индукционного магнитного полюса (38L) совпадает с фазой второго индукционного магнитного полюса (38R). Первые и вторые индукционные магнитные полюсы собираются в корпус (31) ротора таким образом, что они вставляются в линейные щели (31а), сформированные в корпусе ротора в направлении оси (L). Поскольку первые и вторые индукционные магнитные полюсы (38L, 38R) выровнены в направлении оси (L), внешний ротор (13) имеет простую конструкцию и повышенную надежность. Кроме того, облегчается поддержка и сборка первых и вторых индукционных магнитных полюсов (38L, 38R) во внешнем роторе (13). 4 н. и 12 з.п. ф-лы, 39 ил.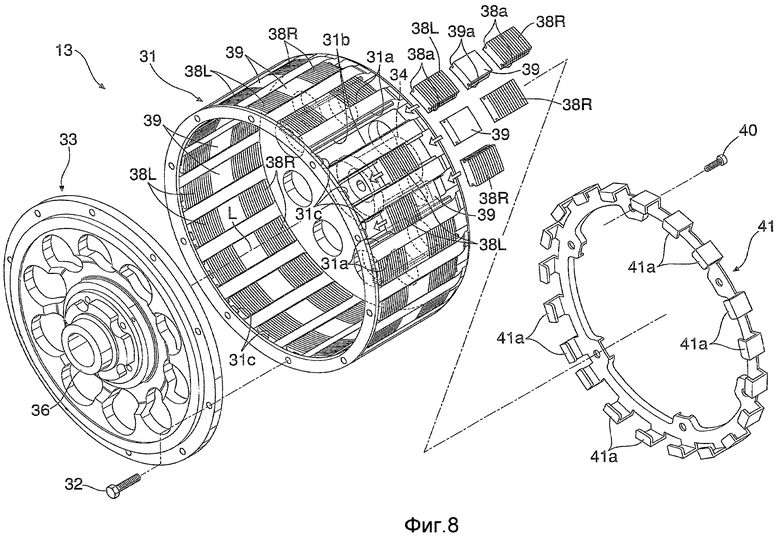
1. Двигатель, содержащий:
кольцеобразные статоры (12L, 12R), расположенные так, чтобы окружать ось (L); первый ротор (14), вращающийся вокруг оси (L); и второй ротор (13), расположенный между статором (12) и первым ротором (14) и вращающийся вокруг оси (L),
при этом статоры (12L, 12R) содержат первый ряд якорей и второй ряд якорей, которые расположены в направлении оси (L), причем первый ряд якорей включает в себя множество первых якорей (21L), которые расположены вдоль окружности и которые генерируют первое вращающееся магнитное поле, вращающееся в окружном направлении посредством магнитного полюса, генерируемого на множестве первых якорей при подаче электроэнергии, а второй ряд якорей включает в себя множество вторых якорей (21R), которые расположены вдоль окружности и которые генерируют второе вращающееся магнитное поле, вращающееся в окружном направлении посредством магнитного полюса, генерируемого на множестве вторых якорей (21R) при подаче электроэнергии;
при этом первый ротор (14) содержит первый ряд постоянных магнитов и второй ряд постоянных магнитов, которые расположены в направлении оси (L), причем первый ряд постоянных магнитов включает в себя множество первых постоянных магнитов (52L), расположенных так, чтобы их магнитные полюса имели поочередно изменяющуюся полярность с заданным шагом (Р) вдоль окружности, а второй ряд постоянных магнитов включает в себя множество вторых постоянных магнитов (52R), расположенных так, чтобы их магнитные полюса имели поочередно изменяющуюся полярность с заданным шагом (Р) вдоль окружности;
при этом второй ротор (13) содержит первый ряд индукционных магнитных полюсов и второй ряд индукционных магнитных полюсов, которые расположены в направлении оси (L), причем первый ряд индукционных магнитных полюсов включает в себя множество первых индукционных магнитных полюсов (38L), расположенных с заданным шагом (Р) вдоль окружности и изготовленных из магнитно-мягкого материала, а второй ряд индукционных магнитных полюсов включает в себя множество вторых индукционных магнитных полюсов (38R), расположенных с заданным шагом (Р) вдоль окружности и изготовленных из магнитно-мягкого материала;
при этом первый ряд якорей и первый ряд постоянных магнитов являются противоположными друг другу на противоположных сторонах в радиальном направлении первого ряда индукционных магнитных полюсов, соответственно, а второй ряд якорей и второй ряд постоянных магнитов являются противоположными друг другу на противоположных сторонах в радиальном направлении второго ряда индукционных магнитных полюсов, соответственно; и
при этом фаза магнитного полюса первого ряда постоянных магнитов и фаза магнитного полюса второго ряда постоянных магнитов первого ротора (14) смещены относительно друг друга на половину заданного шага (Р) вдоль окружности, фаза полярности первого вращающегося магнитного поля и фаза полярности второго вращающегося магнитного поля статора (12) смещены относительно друг друга на половину заданного шага (Р) вдоль окружности, а фаза первого индукционного магнитного полюса (38L) и фаза второго индукционного магнитного полюса (38R) второго ротора (13) совпадают друг с другом.
2. Двигатель по п.1, в котором в цилиндрическом роторном корпусе (31) второго ротора (13) сформировано множество щелей (31а), проходящих линейно в направлении оси (L), и первые и вторые индукционные магнитные полюсы (38L, 38R) вставлены (плотно) в эти щели (31а).
3. Вращающаяся электрическая машина, содержащая внешний ротор (13), изготовленный из магнитно-мягкого материала и вращающийся вокруг оси (L), причем внешний ротор (13) расположен между статором (12L, 12R), расположенным снаружи в его радиальном направлении, и внутренним ротором (14), расположенным внутри в его радиальном направлении, и
множество индукционных магнитных полюсов (38L, 38R), изготовленных из слабомагнитного материала и размещенных на внешнем роторе (13) с заданными интервалами вдоль окружности,
отличающаяся тем, что индукционные магнитные полюсы (38L, 38R) встроены во внешний ротор (13) и
ограничивающая структура, которая ограничивает движение индукционных магнитных полюсов (38L, 38R) в радиальном направлении относительно ротора (13), предусмотрена между внешним ротором (13) и индукционными магнитными полюсами (38L, 38R).
4. Вращающаяся электрическая машина по п.3, в которой часть каждого индукционного магнитного полюса (38L, 38R) открыта на внешней круглой поверхности внешнего ротора (13).
5. Вращающаяся электрическая машина по п.3, в которой внешний ротор (13) имеет цилиндрическую форму и часть каждого индукционного магнитного полюса (38L, 38R) открыта на внутренней круглой поверхности внешнего ротора (13).
6. Вращающаяся электрическая машина по п.5, в которой ограничивающая структура ограничивает движение индукционных магнитных полюсов (38L, 38R) в радиальном направлении относительно внешнего ротора (13) посредством сцепления между выступами, предусмотренными на роторе (13), и углублениями (38а), предусмотренными на каждом индукционном магнитном полюсе (38L, 38R).
7. Вращающаяся электрическая машина по любому из пп.3, 4, 6, в которой ротор (13) содержит множество щелей (31а), проходящих в направлении оси (L), при этом множество индукционных магнитных полюсов (38L, 38R) и прокладок (39), изготовленных из слабомагнитного материала, расположенных между индукционными магнитными полюсами (38L, 38R), расположенными рядом друг с другом в направлении оси (L), вставлены в упомянутые щели (31а).
8. Вращающаяся электрическая машина по п.7, в которой ротор (13) входит в контакт с прокладкой (39), имеет форму, которая ограничивает движение прокладки (39) в радиальном направлении относительно ротора (13).
9. Вращающаяся электрическая машина по п.7, в которой внешняя круглая поверхность прокладки (39) покрыта кольцом (59), изготовленным из слабомагнитного материала.
10. Вращающаяся электрическая машина по любому из пп.3, 4, 6, 8, 9, которая дополнительно содержит держатель (41) для ограничения движения индукционных магнитных полюсов (38L, 38R) в направлении оси (L) относительно внешнего ротора (13).
11. Вращающаяся электрическая машина по любому из пп.3, 4, 6, 8, 9, в которой внешний ротор (13) дополнительно содержит корпус (31) ротора приплюснутой цилиндрической формы; крышку (33) ротора, соединенную с корпусом (31) ротора таким образом, чтобы покрывать отверстие корпуса ротора; вращающиеся валы (34, 36), предусмотренные в донных частях корпуса (31) ротора и крышки (33) ротора.
12. Магнитная машина, содержащая первый ряд магнитных полюсов, в котором множество магнитных полюсов (21L, 21R) расположено вдоль окружности, второй ряд магнитных полюсов, в котором множество магнитных полюсов (52L, 52R) расположено вдоль окружности, и ряд индукционных магнитных полюсов, в котором множество индукционных магнитных полюсов (38L, 38R), изготовленных из магнитно-мягкого материала, расположено вдоль окружности, причем ряд индукционных магнитных полюсов размещен между первым рядом магнитных полюсов и вторым рядом магнитных полюсов,
отличающаяся тем, что угол (θ2), формируемый противоположными концами вдоль окружности индукционных магнитных полюсов (38L, 38R) ряда индукционных магнитных полюсов относительно оси (L), устанавливается меньшим, чем, по меньшей мере, один из угла (θ1) машины, соответствующего электрическому углу 180° магнитных полюсов (21L, 21R) первого ряда магнитных полюсов, и угла (θ0) машины, соответствующего электрическому углу 180° магнитных полюсов (52L, 52R) второго ряда магнитных полюсов.
13. Магнитная машина, содержащая первый ряд магнитных полюсов, в котором множество магнитных полюсов (21L, 21R) расположено в линейном направлении, второй ряд магнитных полюсов, в котором множество магнитных полюсов (52L, 52R) расположено в линейном направлении, и ряд индукционных магнитных полюсов, в котором множество индукционных магнитных полюсов (38L, 38R), изготовленных из магнитно-мягкого материала, расположено в линейном направлении, причем ряд индукционных магнитных полюсов размещен между первым рядом магнитных полюсов и вторым рядом магнитных полюсов,
отличающаяся тем, что расстояние (L2) между противоположными концами в линейном направлении индукционных магнитных полюсов (38L, 38R) ряда индукционных магнитных полюсов меньше, чем, по меньшей мере, одно из расстояния (L1), соответствующего электрическому углу 180° магнитных полюсов (21L, 21R) первого ряда магнитных полюсов, и расстояния (L0), соответствующего электрическому углу 180° магнитных полюсов (52L, 52R) второго ряда магнитных полюсов.
14. Магнитная машина по любому из пп.12 или 13, в которой один из первого ряда магнитных полюсов и второго ряда магнитных полюсов содержит множество якорей (21L, 21R), при этом движущееся магнитное поле генерируется посредством управления электрической энергией для множества якорей (21L, 21R), благодаря чему перемещается, по меньшей мере, один из первого ряда магнитных полюсов и второго ряда магнитных полюсов и ряда индукционных магнитных полюсов.
15. Магнитная машина по любому из пп.12 или 13, в которой один из первого ряда магнитных полюсов и второго ряда магнитных полюсов содержит множество якорей (21L, 21R), и, по меньшей мере, один из первого ряда магнитных полюсов и второго ряда магнитных полюсов и ряда индукционных магнитных полюсов перемещается посредством внешней силы, благодаря чему генерируется электродвижущая сила во множестве якорей (21L, 21R).
16. Магнитная машина по любому из пп.12 или 13, в которой, по меньшей мере, один из первого ряда магнитных полюсов, второго ряда магнитных полюсов и ряда индукционных магнитных полюсов перемещается под действием внешней силы таким образом, чтобы перемещать, по меньшей мере, один из остальных двух рядов.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2248657C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1998 |
|
RU2131637C1 |
| ПРИВОДНОЕ УСТРОЙСТВО | 1998 |
|
RU2129965C1 |
| Моментный двигатель с постоянными магнитами | 1984 |
|
SU1220065A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

