Изобретение относится к автоматике, в частности к устройствам для определения параметров положения объектов, и .может быть использовано при построении системы технического зрения промышленных роботов.
Цель изобретения - повышение точности устройства.
На чертеже представлена структурная схема устройства.
Устройство содержит генератор 1 импульсов, первый 2 элемент задержки, источник 3 напряжения, первый триггер 4, элемент И 5, регистр 6 сдвига, первый счетчик 7, второй счетчик 8, второй триггер 9, ждущий мультивибратор 10, третий счетчик 11 первую группу 12,13 регистров, преобразователь 14 кодов, выполненный, например, в виде постоянного ЗУ, первый блок памяти 15, выполняющий функции функционального преобразователя, выходной регистр 16, телевизионный датчик 17, инвертор 18, вторую группу 19,20 регистров, первую группу 21 инверторов, первый сумматор 22 третий триггер 23, второй элемент задержки 24, вторую группу инверторов 25, второй сумматор 26, первую группу 27,28 сумматоров, депшфраторы 29, 30, коммутаторы 31,32, выполненные в виде мультиплексоров, второй блок 33 памяти и третий блок 34 памяти, выполняюпще функции функциональных преобразователей, и вторую группу 35,36 сумматоров.
Устройство работает следующим образом.
На этапе обучения производится анализ изображения. Для этого вводится понятие годографа изображения. Под годографом изображения принимают отрезок прямой, ограниченный крайними нижней и верхней точками изображения.
На этапе обучения оператором определяются все положения детали, где годограф образован различными вершинами. Затем производится наложение всех изображений друг на друга, при этом совмещаются крайние нижние точки. Нумеруются получившиеся зоны и производится определение минимального числа датчиков, при считывании информации с которых можно различить все возможные положения.
Рассмотрение рабочего режима начинают с момента, когда триггер 4
сброшен, при этом элемент И 5 открыт, а также разрешен счет в счетчиках 8, II и запрещен в счетчике 7, регистр 6 установлен в нулевом состоянии.
Импульсы с генератора 1 поступают на счетчик 8, к старшему разряду которого подключен счетчик 1I, коды с которых через мультиплексоры 31,32 поступают на дешифраторы 29,30 горизонтальной и вертикальной развертки, в результате чего производится после- дователы 3э1й опрос мишени датчика 17 {развертка идет по строкам снизу вверх) .
Как только текущий элемент изображения будет перекрыт деталью, положительный переход с выхода датчика 17 установит второй триггер 9 в единичное состояние, при этом отрицательный перепад с инвертирующего выхода этого триггера вызов ет запись в регистрах 12-и 19 значений координат крайней нижней точки. По мере дальнейшего сканирования изображения
триггер 23 будет устанавливаться в единичное состояние всякий раз, когда элемент изображения будет перекрыт деталью; последний раз установится в единичное состояние, когда
будет пройден самьй верхний элемент изображения детали.
Совместно с каждой установкой триггера 23 в единичное состояние производится запись в регистры 13,
20 текущих координат. Текущее значение координат на регистры 12,13, 19,2-0 поступает со счетчиков 8,11. Когда будет произведено все сканирование изображения, в регистрах 13,
20 останутся координаты крайней верхней точки изображения детали.
Отрицательный перепад на выходе старшего разряда счетчика I1, говорящий о конце сканирования, инвертируясь, вызывает установку триггера 4 в единичное состояние. Второй элемент задержки 24 необходим для надежного срабатывания триггера. Это вызывает прекращение счета в счетчикак 8,11 закрывается элемент И 5, разрешается работа счетчика 7, переключаются мультиплексоры 31,32, разрешается работа регистра 6. Информация из регистров 19,20 поступает на
сумматор 22. Инвертирование значения входной величины в инверторах 2I и наличие единицы на входе начального переноса сумматора 22 необходимо для образования дополнительного кода для проведения операции вычитания. Аналогично происходит вычисление результата во втором сумматоре 26. Полученные значения поступают в блок 34 памяти, где вычисляются значения тригонометрических функций, которые поступают в блок памяти 15. Коды опрашиваемых точек поступают на другой вход блока с выхода счетчика 7, С выхода блока 15 полученные значения поступают на сумматоры 27,28, где происходит их суммирование с кодами регистров 12 и 19 соответственно. Значения полученных координат с выходов сумматоров 27,28 поступают через мультиплексоры 31,32 на дешифраторы 29,30.
Сигнал с выхода датчика 17 поступает на информационный вход регистра 6. По сигналам с генератора 1 производится последовательньй опрос всех точек. В результате опроса информация о точках будет записана в регистре 6, с которого информация поступает на преобразователь 14 кодов. Последний преобразует код с регистра 6 в код номера положения, который поступает в блок 33, на другие входы которого поступают значения тригонометрических функций. С выхода блока 33 полученные значения поступают в выходной регистр 16, а также на сумматоры 35,36, где суммируются со значениями кодов с регистров 12 и 19 соответственно. Значения координат центра захвата поступают в регистр 16.
Как только будет произведен опрос всех точек ( коэффициент пересчета счетчика 7 равен числу опрашиваемых точек), по отрицательному перепаду с выхода старшего разряда этого счетчика произойдет запись выходных значений в регистр 16, а также опрокидывание ждущего мультивибратора 10, импульс с выхода которого опрокинет триггер 4, и процесс повторится заново.
Формула изобретения
Устройство для определения параметров положения объектов, содержащее первый счетчик, входы которого со- 5 единены с генератором импульсов и с одним выходом первого триггера, а выход подключен к одному входу перво
(О
t5
20
25
е 5 2I84064
го блока памяти, первый элемент задержки, соединенный с генератором импульсов, с одним входом элемента И и с одним входом регистра сдвига, другой вход которого подключен к соответствующему выходу первого триггера, второй счетчик, входы которого соединены с генератором импульсов и с другим выходом первого триггера, а выход подключен к одним входам регистров первой группы и к одному входу одного коммутатора и третьего счетчика, другой вход которого соединен с соответствующим выходом первого триггера, телевизионный датчик, входы которого подключены к дешифраторам, соединенным с выходами соответствующих коммутаторов, а выход телевизионного датчика подключен к третьему входу регистра сдвига и к одному входу второго триггера, другой вход которого соединен с источником напряжения, а выход подключен к другому входу одного регистра первой группы, преобразователь кода, вход которого соединен с выходом регистра сдвига, а выход подключен к одному входу второго блока памяти, выход которого соединен с одним входом выходного регистра, другой вход которого подключен к соответствующему выходу первого триггера, и второй элемент задержки, отличающееся тем, что, с целью повышения точности устройства, оно содержит инвертор, вход которого соединен с выходом третьего счетчика, а выход подключен к входу второго элемента задержки и к одному входу первого триггера, другой вход которого соединен с выходом второго элемента задержки, вторую группу регистров, одни входы которых подключены к выходам второго триггера и третьего счетчика, первую группу инверторов, входы которых соединены с выходами первого регистра второй группы, первый сумматор, входы которого подключены к выходам источника напряжения, инверторов первой группы и соответствующего регистра второй группы, вторую группу инверторов, входы которых соединены с выходами одного регистра первой группы, второй сумматор, входы которого подключены к источнику напряжения, выходам инверторов второй группы и второго регистра первой группы, третий блок памяти.
30
35
40
45
50
входы которого соединены с входами первого и второго сумматоров, а выход подключен к другим входам первого и второго блоков памяти, первую группу сумматоров, одни входы которых соединены с выходами первого блока памяти, а выходы подключены к другим входам соответствующих коммутаторов, третий триггер, входы которого соединены с выходами телевизионного датчика и элемента И, а выход подключен к другим входам соответствующих регистров первой и второй гоупп, ждущий мультивибратор, вход
которого соединен с выходом первого счетчика, а выход подключен к другому входу первого триггера, и вторую
группу сумматоров, одни входы кото- рьк соединены с выходами второго блока памяти, а выходы подключены к другим входам выходного регистра, при этом выход первого регистра первой группы соединен с другими входами одних сумматоров первой и второй групп, а выход первого регистра второй группы подключен к другим вхоам других сумматоров первой и второй групп.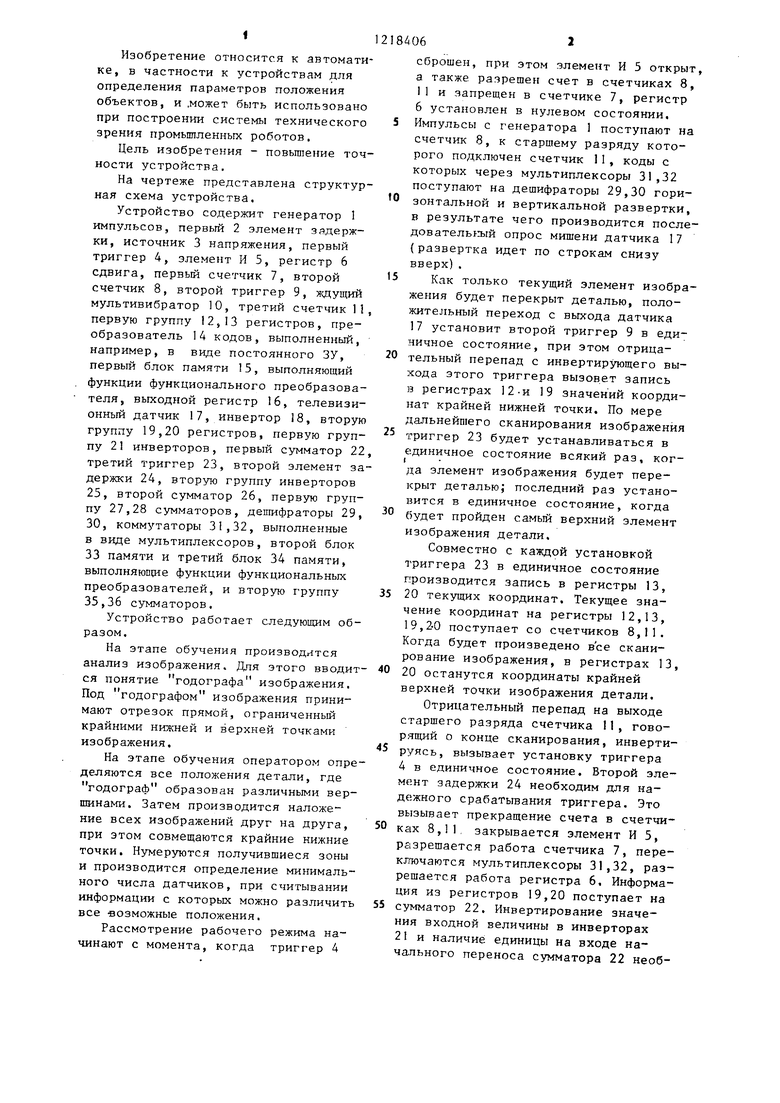

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВЫЧИСЛЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УНРАВЛЕНИЯ1Изобретение относится к автоматике и телемеханике и предназначено для исследования динамических свойств систем автоматического управления.Известны устройства для построения корневых годографов систем автоматического управления, содержащие вентили, группы вентилей, блоки памяти, схемы ИЛИ, схемы задержки, схему сравнения, сумматор, выходы которого соединены с первыми входами одноименных вентилей первой и второй групп, первый регистр, выходы которого соединены с первыми входами соответствующих вентилей третьей группы, второй регистр, выходы которого соединены с первыми входами одноименных вентилей четвертой и пятой групп, первый счетчик, выходы которого соединены с первыми входами одноименных вентилей ще- стой и седьмой групп, второй счетчик, выходы которого соединены с первыми входами одноименных вентилей восьмой и девятой групп, триггеры и генератор импульсов.Однако известные устройства имеют недостаточное быстродействие, невысокую точность работы и ограниченные функциональные возможности. | 1973 |
|
SU408313A1 |
| Устройство для подсчета молоди рыб в потоке воды | 1983 |
|
SU1125639A1 |
| Устройство для выделения признаков изображений | 1988 |
|
SU1553997A1 |
| Устройство для считывания координат точек объектов | 1989 |
|
SU1693618A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для считывания информации с интерференционных картин | 1980 |
|
SU883936A1 |
| Устройство для ввода графической информации | 1987 |
|
SU1509960A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |

Изобретение относится к области технической кибернетики, в частности оно может быть использовано при построении систем технического зрения промышленных роботов. Изобретение позволяет повысить точность определения пар -метров положения объектов путем введения описания всех положений изображения объектов с помощью так назьгоаемого годографа изображения, формирования дискретного числа зон, в которых совмещаются крайние нижние точки объек- :: тов, и вьщеления необходимого числа датчиков, при считьшаини информации с которых можно различить все возможные положения. Для этого в предложенном техническом решении с помощью функциональных преобразователей и групп сумматоров осуществляется определение координат центра и угла поворота захвата соответствующих дателей, которые через выходной регистр выдаются в систему управления роботом. 1 ил. (О ся Ю 00 йь
| Устройство для распознавания образов | 1978 |
|
SU702391A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Патент США № 3707598, кл | |||
| Способ получения кодеина | 1922 |
|
SU178A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
