Настоящее изобретение относится к системам управления транспортным средством, которые увеличивают стабильность транспортного средства.
Системы контроля стабильности транспортного средства все чаще используются в автомобильной промышленности и становятся стандартным оборудованием во многих автомобилях. Большинство систем контроля стабильности автомобиля на рынке базируются на работе с тормозом. Системы контроля стабильности, работающие с тормозом, используют аппаратную часть системы антиблокировки тормоза (ABS), чтобы применить силы торможения отдельного колеса для корректировки динамики отклонения автомобиля от направления движения. В то время как системы контроля стабильности применимы во многих ситуациях, они имеют тенденцию ухудшать эксплуатационные качества автомобиля при продольном движении, особенно при ускорении автомобиля.
Система контроля для автомобиля, имеющего первую и вторую оси, содержит устройство сцепления, предназначенное для распределения крутящего момента между первой и второй осями, и контроллер сцепления для операций управления устройством сцепления, начиная от запуска автомобиля до достижения заданной скорости. Контроллер сцепления выполнен таким образом, чтобы переводить устройство сцепления в первое рабочее состояние автомобиля согласно, по меньшей мере, одному рабочему параметру автомобиля, который отображает состояние плохого сцепления с дорогой, и дальнейшее включение устройства сцепления во втором рабочем состоянии автомобиля во время состояния плохого сцепления с дорогой, согласно разнице между действительной степенью отклонения от направления движения и заданной степенью отклонения автомобиля.
В настоящем изобретении применяется способ активного управления стабильностью, использующий устройство сцепления, чтобы увеличить боковую динамику автомобиля при сохранении продольного движения. В другом варианте выполнения настоящего изобретения применяется система управления, которая обеспечивает увеличение стабильности управления сцеплением с дорогой. Управление сцеплением, позволяющее увеличить стабильность, оценивалось в условиях запуска автомобиля с нажатой педалью газа на Т-образном дорожном пересечении.
Экспериментальные данные показывают значительное увеличение стабильности в операционном режиме управления сцеплением.
Изобретение поясняется чертежами, на которых представлено следующее:
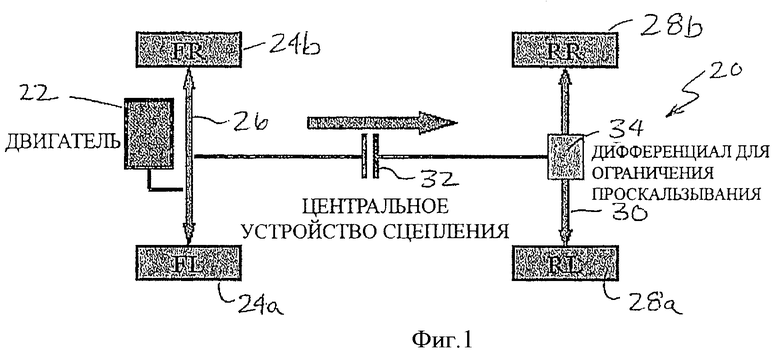
фиг.1 - типичный полноприводный автомобиль с конструкцией трансмиссии, схематично;
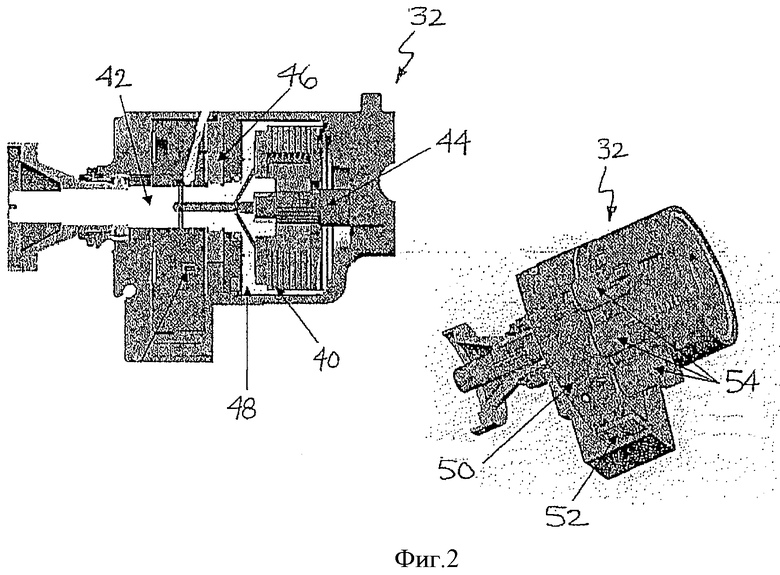
фиг.2 - типичное устройство сцепления с электронной системой управления для использования в системе управления, согласно настоящему изобретению;
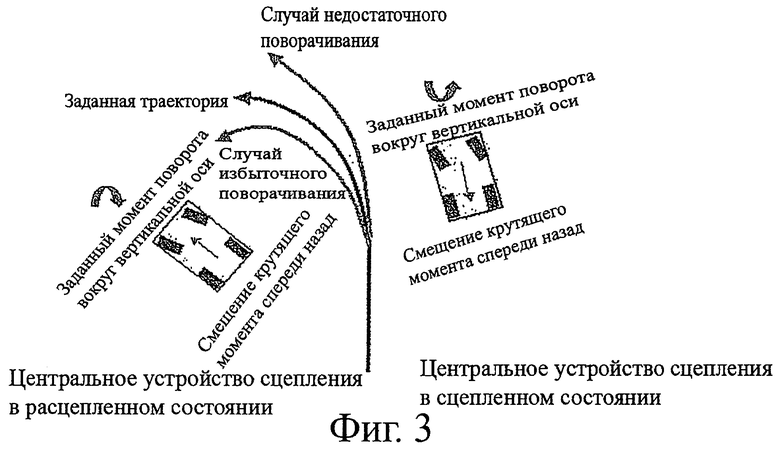
фиг.3 - динамика типичного автомобиля, использующего центральное устройство сцепления с электронной системой управления, и эффект воздействия на управление степенью отклонения от направления движения, когда производится разъединение и включение сцепления с помощью центрального устройства сцепления с электронной системой управления;
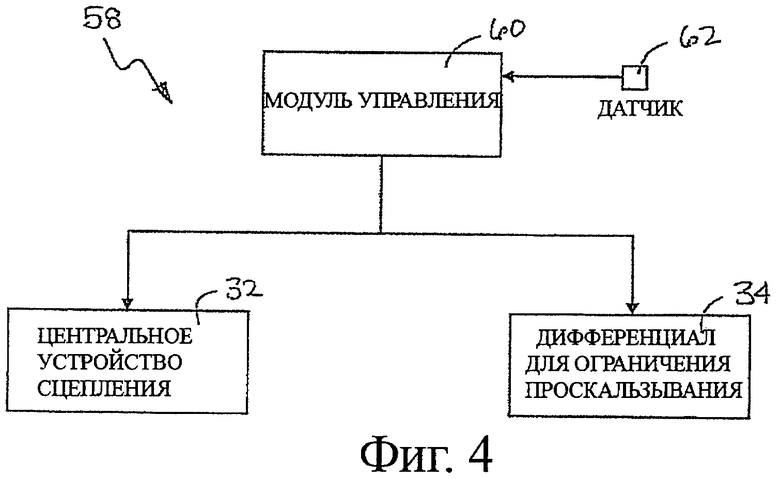
фиг.4 - система управления, согласно варианту выполнения настоящего изобретения, схематично;
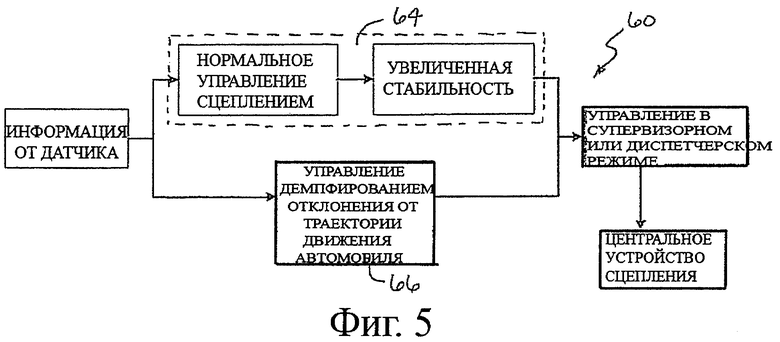
фиг.5 - модуль электронного управления, согласно варианту выполнения настоящего изобретения, для использования в системе управления, показанной на фиг.4;
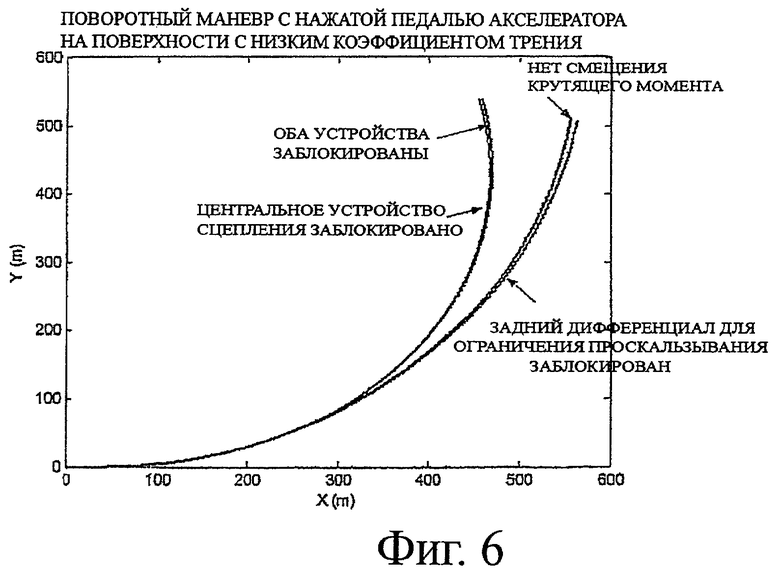
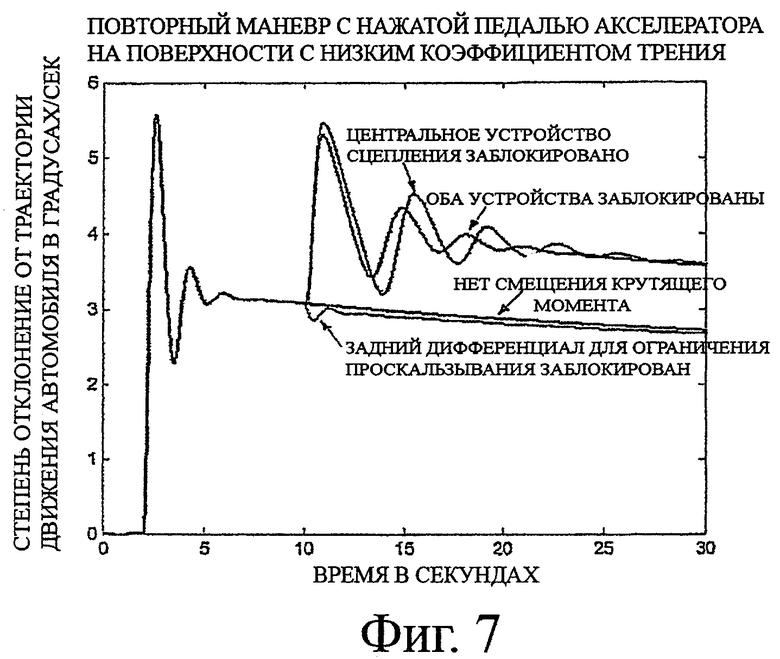
фиг.6, 7 - сравнительные характеристики для автомобиля с полностью нажатой педалью акселератора, совершающего поворот на поверхности с низким коэффициентом трения, для автомобиля, использующего центральное сцепление;
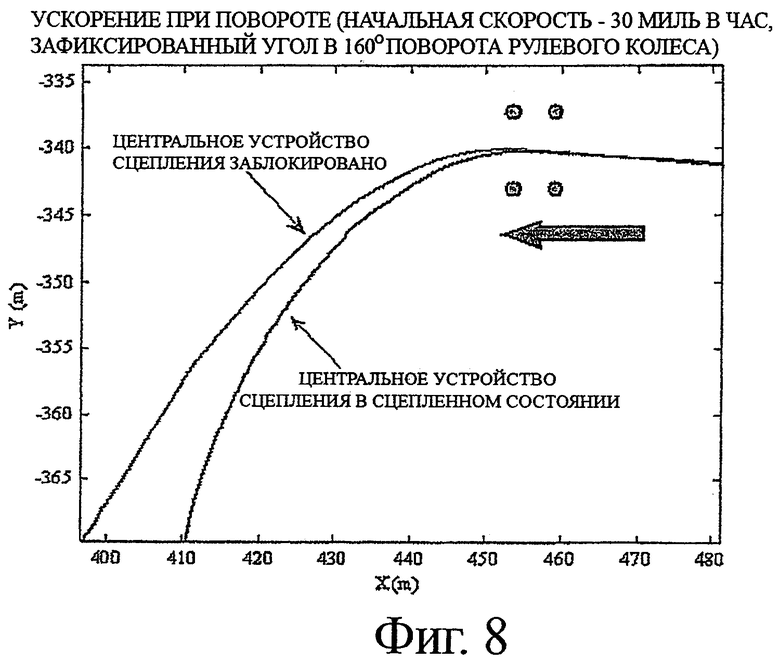
фиг.8, 9 - сравнительные характеристики для автомобиля с полностью нажатой педалью газа, совершающего поворот на поверхности с низким коэффициентом трения, для автомобиля с центральным сцеплением:
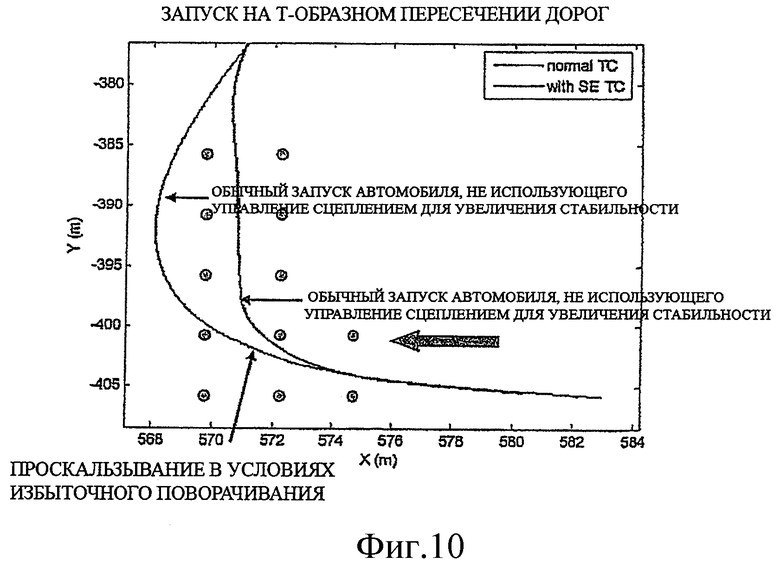
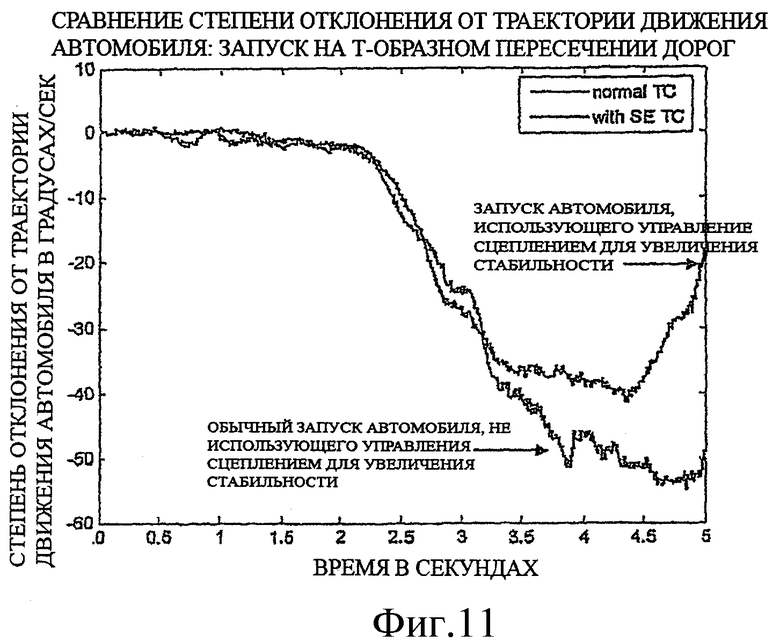
фиг.10, 11 - сравнительные характеристики для резкого старта автомобиля с полностью нажатой педалью газа на Т-образном дорожном пересечении, при этом в автомобиле используется система управления, согласно варианту выполнения настоящего изобретения.
Следует учесть, что чертежи не ограничивают объем правовой охраны настоящего изобретения. Фиг.1 схематично иллюстрирует типичный полноприводный автомобиль с конструкцией 20 трансмиссии, включающей расположенный в боковом направлении двигатель 22. Двигатель 22 соединен с парой передних колес 24а, 24b через переднюю ось или ведущий мост 26 и парой задних колес 28а, 28b через заднюю ось 30. Передняя ось 26 первично и непосредственно приводится от двигателя 22. Задняя ось 30 имеет непрямой привод через передаточное устройство и центральное устройство сцепления или сцепляющую муфту 32. Задняя ось 30 механически соединена с передним ведущим мостом 26 через один или более карданный вал или вал трансмиссии. Дополнительный дифференциал 34 для ограничения проскальзывания с электронным управлением используется для смещения крутящего момента трансмиссии на задних колесах 28а, 28b. В то время как конструкция трансмиссии, изображенная на фиг.1, является обычной конструкцией переднего привода, в которой крутящий момент передается на заднюю ось 30 по запросу, изобретение не предназначено для того, чтобы иметь такие ограничения и может включать обычную конструкцию с задним приводом.
Центральное устройство 32 сцепления, такое как электронное центральное сцепление, производимое фирмой Eaton Corporation под названием HTC-I™ и изображенное на фиг.2, подсоединяется к трансмиссии и адаптируется для передачи крутящего момента от переднего ведущего моста 26 на заднюю ось 30. Типичное блокирующее центральное устройство 32 сцепления, показанное на фиг.2, является электронным устройством, управляющим всеми колесами, спроектированным как интегрированный компонент модуля привода задней оси автомобиля. Центральное устройство 32 передает мощность мягко и быстро от трансмиссии автомобиля к гипоидной зубчатой передаче модуля привода задней оси в ответ на входные сигналы от электронного модуля управления.
Как показано на фиг.2, передача энергии обеспечивается с помощью многопластинчатой муфты 40 сцепления с активным управлением, работающей в масляной ванне и расположенной между промежуточным карданным валом 42, к которому присоединен вал трансмиссии автомобиля, и гипоидной зубчатой передачей 44. Включение муфты сцепления ограничивает проскальзывание между валом трансмиссии и гипоидной зубчатой передачей 44, и, таким образом, крутящий момент передается от вала трансмиссии к гипоидной зубчатой передаче 44, причем значение передаваемого крутящего момента будет меньше или равно крутящему моменту муфты. Встроенный гидравлический насос 46 героторного типа обеспечивает гидравлическое давление, приводящее в действие поршень 48 муфты при вращении промежуточного вала 42. Стационарный гидравлический трубопровод 50 имеет впускное отверстие 52 для масла, через которое насос 46 всасывает масло из маслосборника для его нагнетания в канал, имеющий прямое сообщение и с поршнем 48 и, по меньшей мере, с одним соленоидом, работающим с клапаном 54 регулировки давления. Когда клапан 54 отключен, масло свободно протекает через клапан и стекает назад в маслосборник, оказывая незначительное влияние или не воздействуя гидравлическим давлением на поршень 48 активизации муфты. Когда клапан 54 включается, поток масла ограничивается клапаном, создающим гидравлическое давление на поршень 48, и вводя в зацепление муфту 40, в соответствии с уровнем, пропорциональным гидравлическому давлению. Другие детали, относящиеся к конструкции и функционированию центрального устройства 32 сцепления, описаны в находящейся на рассмотрении заявке на US 11/167,474, которая принадлежит правопреемнику настоящего изобретения и включена в настоящее описание в качестве ссылки.
Центральное блокирующее устройство 32 сцепления обеспечивает быстрое сцепление и передачу приложенного крутящего момента и его удаление, по желанию, для обеих карданных передач при выполнении автомобилем контролируемых динамических операций (как, например, тех, которые находятся в фокусе настоящего изобретения), а также для совместимости со многими распространенными системами динамической корректировки, основанными на работе с тормозом. Для поддержки этой операции центральное блокирующее устройство 32 сцепления показывает время сцепления и расцепления меньше чем приблизительно 50 миллисекунд. В рабочем режиме крутящий момент передается от переднего ведущего моста 26 на заднюю ось 30, если скорость колеса передней оси больше, чем скорость колеса задней оси, и положительный крутящий момент двигателя подается на карданный вал (например, при нажатой педали акселератора).
При работе автомобиля центральное блокирующее устройство 32 сцепления периодически входит в зацепление или блокируется для передачи крутящего момента от переднего ведущего моста 26 на заднюю ось 30. Эта операция выполняется для поддержания сцепления автомобиля с дорогой. Для управления сцеплением автомобиля с дорогой, в зависимость от которой может быть поставлена степень зацепления центрального устройства 32, без ограничений, которая также зависит от положения педали газа автомобиля и степени проскальзывания переднего колеса (например, чем больше проскальзывание, тем больше зацепление центрального устройства). Однако функционирование центрального устройства 32 сцепления во время резкого старта автомобиля при Т-образном дорожном пересечении (пересечение между двумя дорожными поверхностями, которые пересекаются под прямым углом) или во время резкого поворота, когда двигатель работает с нажатой педалью акселератора, провоцирует эффект избыточной поворачиваемости автомобиля или приводит к большим углам скольжения на задних колесах автомобиля. Фиг.3 иллюстрирует динамику типичного автомобиля, использующего центральное устройство, и эффект управления отклонением от траектории движения автомобиля при расцеплении и сцеплении центрального устройства сцепления.
В соответствии с настоящим изобретением, система управления 58 и способ управления зацеплением центрального устройства сцепления поддерживают стабильность автомобиля, пока сохраняется сцепление колес с дорогой. Система управления 58 и метод управления в соответствии с настоящим изобретением регулируют сцепление центрального устройства, основываясь на разнице между заданной степенью отклонения от траектории движения автомобиля и действительным его значением. Активное управление сцеплением центрального устройства и, соответственно, величина передаваемого центральным устройством крутящего момента уменьшают избыточную поворачиваемость автомобиля, которая вызывает нежелательное отклонение от траектории движения автомобиля. Настоящее изобретение управляет центральным устройством сцепления во время запуска и ускорения, чтобы сохранить мощность карданной передачи и стабильность при отклонении от траектории движения автомобиля.
Как показано на фиг.4, система управления содержит модуль 60 управления, например, такой как микропроцессорный электронный модуль управления, содержащий устройство памяти, которое может хранить, например, одну или более карт, содержащих информацию по рабочим параметрам автомобиля, и, по меньшей мере, один автомобильный датчик 62, например, такой как, без ограничения, датчик отклонения от траектории движения автомобиля, датчик скорости колеса, датчик бокового ускорения и/или датчик угла рулевого управления. Модуль управления вырабатывает входной сигнал центральному устройству 32 и дифференциалу 34 для ограничения проскальзывания для управления сцеплением и расцеплением устройств. Метод управления дифференциалом 34 раскрывается в также находящейся на рассмотрении заявке на патент США, имеющей название «Увеличивающее стабильность сцепление и управление отклонением от траектории движения автомобиля с помощью электронного дифференциала, ограничивающего скольжение», которая принадлежит правопреемнику настоящего изобретения и включена в настоящее описание в качестве ссылки.
В варианте выполнения настоящего изобретения, показанного на фиг.5, модуль 60 управления содержит контроллер 64, предназначенный для управления работой центрального устройства сцепления, начиная от запуска автомобиля до достижения заданной скорости. Контроллер 64 сцепления вводит в зацепление центральное устройство сцепления в первом операционном режиме автомобиля, согласно, по меньшей мере, одному рабочему параметру автомобиля, такому как скорость колеса, показывающему операционное состояние низкого сцепления с дорогой; управляет устройством сцепления во втором операционном режиме автомобиля, во время рабочего состояния низкого сцепления с дорогой, определяемого согласно разнице между степенью действительного отклонения от траектории движения автомобиля и заданной целью или желаемым его значением. Электронный модуль 60 управления может также содержать контроллер 66 стабильности для управления зацеплением центрального устройства сцепления при заданной скорости автомобиля или выше ее. Контроллер 64 сцепления и контроллер 66 стабильности могут быть аппаратно обеспечены связью с модулем 60 управления, могут быть встроены внутрь модуля 60 управления или формировать неаппаратный компонент (например, программный) модуля 60 управления или другого контроллера автомобиля.
При эксплуатации автомобиля действительное отклонение от траектории движения периодически или постоянно сравнивается с желаемым его значением. Действительное отклонение от траектории движения может быть измерено с помощью датчика отклонения от траектории движения или может быть рассчитано на основе информации о рабочих параметрах автомобиля, получаемой от различных датчиков, которые известны в данной области техники. Желаемое отклонение от траектории движения может храниться в карте, в памяти системы управления или может быть также рассчитано на основе информации о рабочих параметрах автомобиля, получаемой от различных датчиков.
Блокирующий крутящий момент центрального устройства сцепления, необходимый для поддержания стабильности автомобиля и сцепления с дорогой, может быть определен согласно следующему уравнению:

где Threshold - пороговая величина,
τdes - заданный блокирующий крутящий момент центрального устройства сцепления,
τnom - нормальный блокирующий крутящий момент центрального устройства сцепления,
Δrmax - заданная максимальная разница степени отклонения от траектории движения автомобиля,
r - действительная степень отклонения от траектории движения автомобиля,
rdes - заданная цель или заданная степень отклонения от траектории движения автомобиля,
deadband - функция пороговой величины для степени отклонения от траектории движения автомобиля, где Δrthreshold - разрешенная разница.
Модуль 60 управления затем преобразует значение заданного блокирующего крутящего момента во входной сигнал, который передается на центральное устройство 32 сцепления для управления им. Во время работы автомобиля, если автомобиль испытывает эффект избыточного поворачивания (см., например, фиг.3), то блокирующий крутящий момент центрального устройства сцепления уменьшается в пропорции к степени избыточности поворачивания автомобиля.
Чтобы моделировать эксплуатационные характеристики предложенной системы управления с типичной конструкцией трансмиссии, показанной на фиг.1, полная модель автомобиля, использующая центральное устройство сцепления, и дифференциал для ограничения проскальзывания были разработаны с помощью программного обеспечения CarSim. Смоделированный поворотный маневр был первой выполненной операцией, чтобы подтвердить положительный эффект воздействия центрального устройства 32 сцепления и дифференциала 34 для ограничения проскальзывания на динамику отклонения от траектории движения автомобиля. Фиг.6 и 7 графически иллюстрируют сравнительные характеристики для поворотного маневра с открытой дроссельной заслонкой или нажатой педалью газа на поверхности с низким коэффициентом трения (например, µ=0,2). Как показано на фиг.6, блокирование центрального устройства 32 сцепления во время выполнения поворотного маневра с открытой дроссельной заслонкой вызывает меньшую реакцию недостаточной поворачиваемости. В отличие от этого, блокирование задней оси с помощью дифференциала для ограничения проскальзывания имеет меньший эффект или вообще не имеет эффекта на динамику автомобиля на поверхности с низким коэффициентом трения.
Фиг.8 и 9 графически иллюстрируют сравнительные характеристики для поворотного маневра с открытой дроссельной заслонкой на поверхности с низким коэффициентом трения (например, µ=0,2), используя тестовый автомобиль, имеющий центральное устройство сцепления, согласно настоящему изобретению. Как показано на фиг.8, включение центрального устройства 32 сцепления во время выполнения поворотного маневра с открытой дроссельной заслонкой снова вызывает меньшую реакцию недостаточной поворачиваемости по сравнению с подобным маневром с выключенным центральным устройством сцепления.
Фиг.10 и 11 графически иллюстрируют сравнительные характеристики для резкого старта автомобиля с открытой дроссельной заслонкой на Т-образном пересечении дорог, используя тестовый автомобиль, имеющий центральное устройство сцепления, согласно настоящему изобретению, и тестовый автомобиль без системы управления сцеплением, увеличивающей стабильность. Как показано на фиг.10, активно контролируемое включение центрального устройства сцепления во время выполнения резкого старта автомобиля, использующего управление сцеплением для увеличения стабильности, согласно варианту выполнения изобретения, показывает значительно меньшую реакцию недостаточной поворачиваемости, по сравнению с подобным маневром, в котором нет активного контроля центрального устройства сцепления. С помощью фиг.10 и 11 также можно оценить, что автомобиль без управления сцеплением для увеличения стабильности может показывать слишком большое уменьшение эффекта недостаточной поворачиваемости. В обоих режимах работы, с управлением стабильностью и без него, некоторая степень крутящего момента передается от передней оси 26 на заднюю ось 30 центральным устройством 32 сцепления. В отличие от систем управления для увеличения стабильности, базирующихся на ABS, которые рассеивают энергию автомобиля, таким образом ухудшая характеристики автомобиля и его эффективность, система управления и метод, согласно настоящему изобретению, поддерживает стабильность автомобиля при сохранении его сцепления с дорогой.
Изобретение было очень детально описано в вышеупомянутой спецификации, поэтому различные изменения и модификации изобретения станут очевидными специалистам в данной области техники в результате прочтения и понимания спецификации. Подразумевается, что все такие изменения и модификации включены в изобретение в такой степени, как они представлены в обзоре прилагаемой формулы изобретения.

Изобретение относится к системе управления транспортным средством, которая увеличивает стабильность транспортного средства. Система содержит устройство сцепления, контроллер сцепления. Контроллер сцепления выполнен с возможностью введения в зацепление центрального устройства сцепления в операционных режимах автомобиля и последующего управления устройством сцепления, согласно рабочему параметру автомобиля. Рабочий параметр автомобиля показывает операционное состояние низкого сцепления с дорогой. Контроллер сцепления обеспечивает введение в зацепление устройства сцепления, согласно сигналу заданного прикладываемого крутящего момента сцепления. Сигнал заданного прикладываемого крутящего момента сцепления базируется на измененном нормальном сигнале прикладываемого крутящего момента сцепления. Сигнал заданного прикладываемого крутящего момента сцепления равен нормальному сигналу прикладываемого крутящего момента сцепления, умноженному на модификатор. Технический результат заключается в повышении стабильности транспортного средства. 3 з.п. ф-лы, 11 ил.
1. Система управления для автомобиля, имеющего первую и вторую оси, содержащая устройство сцепления, предназначенное для распределения крутящего момента между первой и второй осями, контроллер сцепления для управления работой устройства сцепления, начиная от запуска автомобиля до достижения заданной скорости, при этом контроллер сцепления выполнен с возможностью введения в зацепление центрального устройства сцепления в первом операционном режиме автомобиля, согласно, по меньшей мере, одному рабочему параметру автомобиля, показывающему операционное состояние низкого сцепления с дорогой, и с возможностью последующего управления устройством сцепления во втором операционном режиме автомобиля, во время рабочего состояния низкого сцепления с дорогой, определяемого согласно разнице между степенью действительного отклонения от траектории движения автомобиля и заданной целевой степенью отклонения от траектории движения автомобиля, причем контроллер сцепления выполнен с возможностью введения в зацепление устройства сцепления согласно сигналу заданного прикладываемого крутящего момента сцепления, который базируется на измененном нормальном сигнале прикладываемого крутящего момента сцепления, причем сигнал заданного прикладываемого крутящего момента сцепления равен нормальному сигналу прикладываемого крутящего момента сцепления, умноженному на модификатор, при этом модификатор включает числитель, в котором разница между заданной максимальной разницей степени отклонения от траектории движения автомобиля и произведением функции пороговой величины для степени отклонения от траектории движения автомобиля и разницей между действительной степенью отклонения от траектории движения автомобиля и заданной целевой степенью отклонения от траектории движения автомобиля, и знаменатель, который является заданной максимальной разницей степени отклонения от траектории движения автомобиля.
2. Система управления по п.1, в которой контроллер сцепления выполнен с возможностью регулирования зацепление устройства сцепления во время операционного состояния низкого сцепления с дорогой, согласно разнице между степенью действительного отклонения от траектории движения автомобиля и заданной целевой степенью отклонения от траектории движения автомобиля.
3. Система управления по п.1, в которой в первом операционном режиме автомобиля действительная степень отклонения от траектории движения автомобиля меньше, чем заданная целевая степень отклонения от траектории движения автомобиля, или, в основном, равна ей, а во втором операционном режиме автомобиля действительная степень отклонения от траектории движения автомобиля больше, чем заданная целевая степень отклонения от траектории движения автомобиля.
4. Система управления по п.1, которая содержит контроллер стабильности, предназначенный для управления зацеплением устройства сцепления при заданной скорости автомобиля или выше ее.
| US 2004035622 A1, 26.02.2004 | |||
| Управляемый аттенюатор | 1984 |
|
SU1203687A1 |
| Зажим для проводников | 1986 |
|
SU1403157A1 |
| DE 10333654 A1, 24.02.2005 | |||
| RU 97107345 A, 27.04.1999. | |||

