Область техники, к которой относится изобретение
Настоящее изобретение относится к активной системе управления устойчивостью транспортного средства и к способу улучшения боковой динамики транспортного средства во время продольного движения с помощью электронно-управляемых дифференциалов повышенного трения.
Антиблокировочные тормозные системы (АБС) стали неотъемлемой частью современных пассажирских транспортных средств и могут быть использованы для улучшения сцепления и устойчивости транспортного средства. Типовые системы контроля пробуксовки, основанные на тормозном воздействии, имеют недостаток, заключающийся в потере количества энергии, примерно равного тому, которое передается колесу, имеющему хорошее сцепление. Например, при ускорении или подъеме автомобиля по поверхности с различным коэффициентом сцепления для левой и правой сторон (µ-фактором) он часто теряет энергию в тормозной системе в том объеме, который передается колесу, имеющему хорошее сцепление. Следовательно, тормозной момент ограничивает крутящий момент на колесе, имеющем хорошее сцепление, что часто является недостаточным для перемещения автомобиля, например, при подъеме в гору.
Чтобы преодолеть это ограничение, для привода ведущих колес можно использовать систему контроля пробуксовки, использующую электронно-управляемый дифференциал повышенного трения (ЕУДП) так, чтобы транспортное средство могло сохранять продольное движение, передавая больший крутящий момент колесу, имеющему хорошее сцепление. Полностью блокированные дифференциалы обеспечивают наилучшую возможную продольную тягу, но на скользких поверхностях или поверхностях, характеризующихся µ-фактором, боковая динамика транспортного средства может ухудшаться и автомобиль может отклоняться от направления, заданного водителем. Действительно перераспределение крутящего момента должно осуществляться соответствующим образом, чтобы предотвратить нежелательное отклонение направления движения и возможное ухудшение боковой динамики транспортного средства.
При относительно высоких скоростях могут применяться системы стабилизации курсовой устойчивости для предотвращения потери управляемости транспортным средством. Большинство систем стабилизации устойчивости транспортных средств основаны на торможении. Системы стабилизации устойчивости на базе торможения используют АБС для приложения тормозных сил к отдельному колесу с целью корректировки динамики рыскания. Однако системы на базе торможения обладают тем недостатком, что скоростные характеристики транспортного средства ухудшаются и не согласуются с действиями водителя. Для преодоления этого недостатка применение стабилизации устойчивости за счет перераспределении активного момента более выгодно при ускорении, близком к пределу устойчивости транспортного средства.
Последние два десятилетия свидетельствуют о значительном росте применения систем с четырьмя ведущими колесами (4WD) для пассажирских транспортных средств. Технология повышенного внутреннего трения в дифференциалах (ДП) уже используется во многих выпускаемых моделях. ЕУДП широко используются и доступны на автомобильном рынке и, как известно, обеспечивают транспортному средству добавочное демпфирование рыскания в дополнение к их превосходным тяговым рабочим характеристикам.
Сущность изобретения
Предлагается система управления автомобилем, имеющим первые и вторые колеса, которая содержит дифференциал, предназначенный для распределения крутящего момента между первыми и вторыми колесами, блок управления дифференциалом с момента старта автомобиля до достижения заданной скорости. Блок управления выполнен с возможностью включать дифференциал в первое рабочее состояние в соответствии с по меньшей мере одним рабочим параметром, указывающим на низкий тяговый режим, и далее для управляемого включения дифференциала во втором рабочем состоянии транспортного средства при низком тяговом режиме в соответствии с разностью между фактической скоростью рыскания транспортного средства и заданной скоростью рыскания. Система управления содержит также блок устойчивости для включения дифференциала при заданной или превосходящей ее скорости транспортного средства.
Вариант осуществления настоящего изобретения включает в себя способ активного управления устойчивостью с помощью ЕУДП для улучшения боковой динамики при продольном движении. Другой вариант осуществления настоящего изобретения включает в себя систему управления, которая обеспечивает повышение курсовой устойчивости. Повышенная курсовая устойчивость оценивалась в состоянии прямолинейного разгона при полностью открытой дроссельной заслонке на поверхности лед/асфальт, характеризующейся µ-фактором. Экспериментальные данные показывают значительное улучшение устойчивости при работе системы повышения курсовой устойчивостью.
Краткое описание чертежей
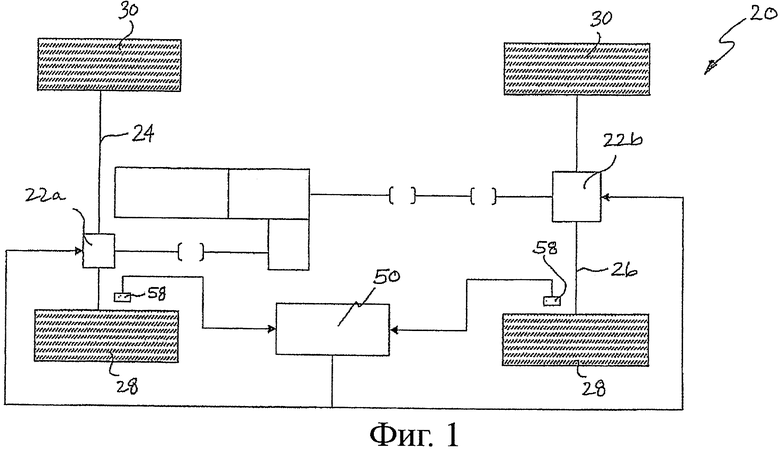
Фиг.1 - пример типичной трансмиссии транспортного средства с электронно-управляемыми дифференциалами повышенного трения;
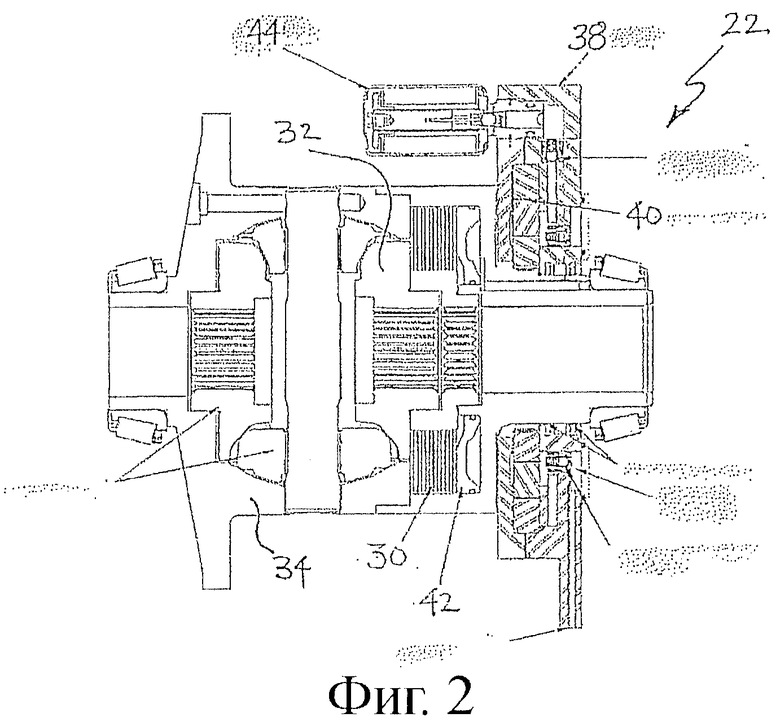
фиг.2 - типичный электронно-управляемый дифференциал с повышенным трением в сечении;
фиг.3 - график срабатывания сцепления для типового электронно-управляемого дифференциала повышенного трения, изображенного на фиг.2;
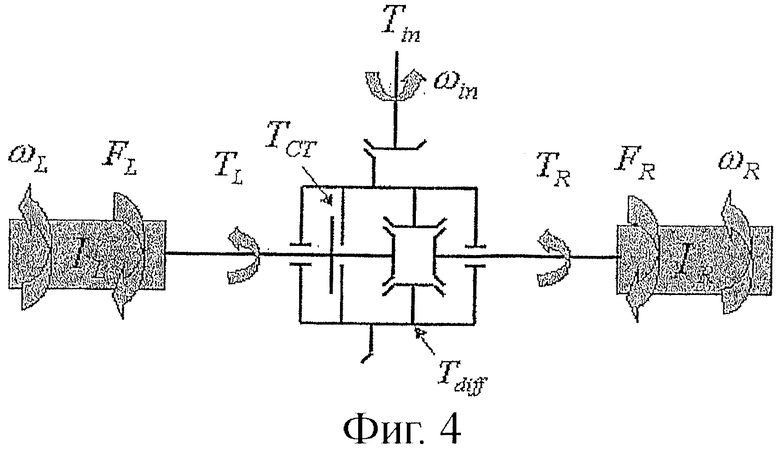
фиг.4 - динамическая модель моста транспортного средства с электронно-управляемым дифференциалом повышенного трения;
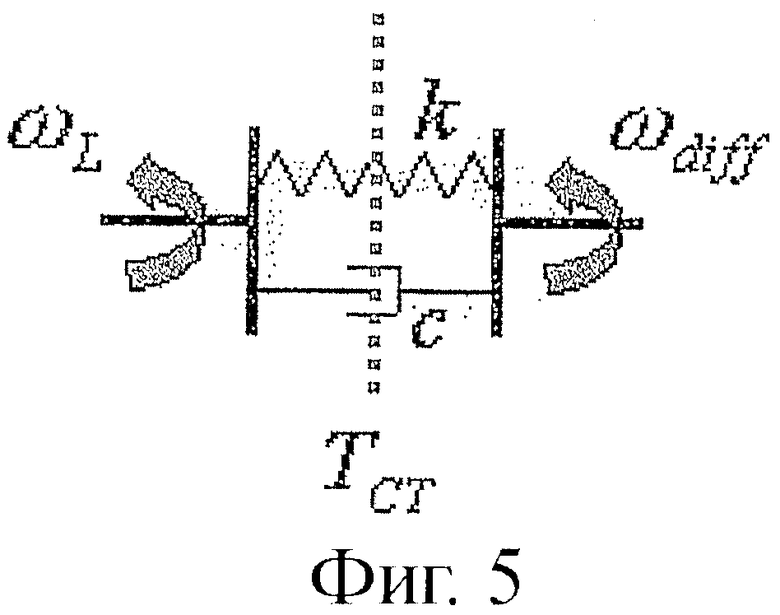
фиг.5 - динамическая модель муфты электронно-управляемого дифференциала повышенного трения;
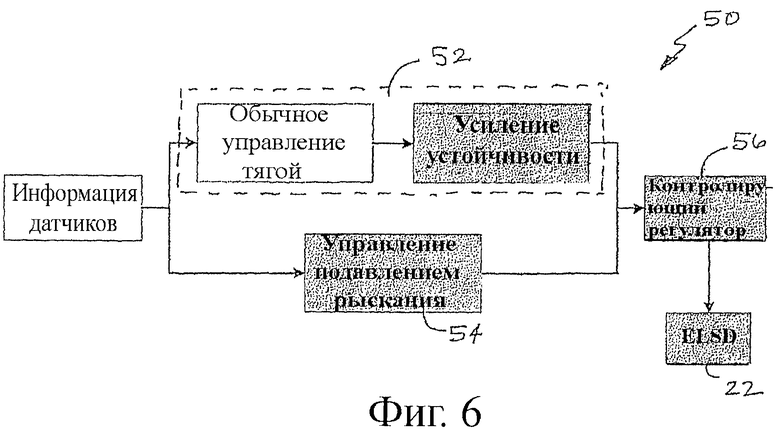
фиг.6 - условная схема системы управления согласно варианту осуществления настоящего изобретения;
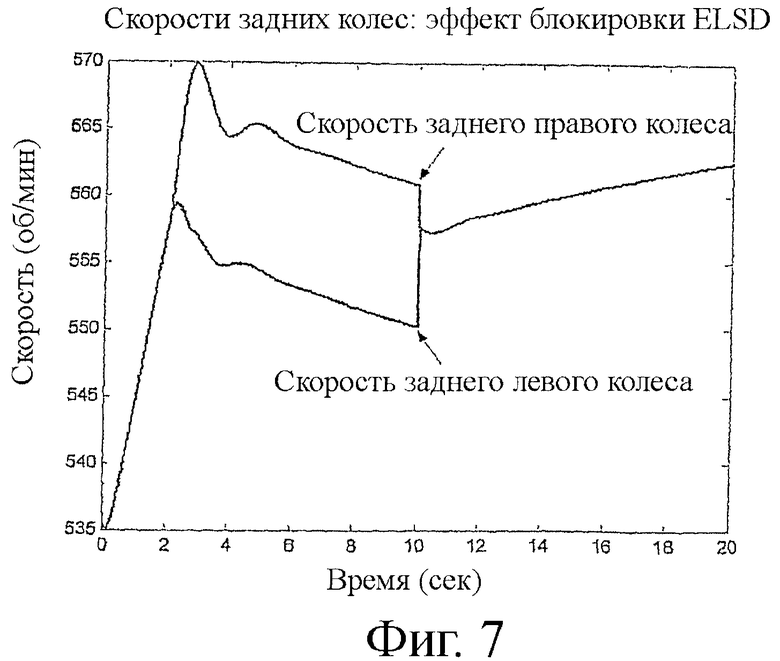
фиг.7 - график, показывающий влияние блокировки электронно-управляемого дифференциала повышенного трения на задний мост транспортного средства;
фиг.8 - график скорости рыскания транспортного средства, имеющего систему управления, соответствующую варианту осуществления настоящего изобретения, при двойной смене полосы движения;
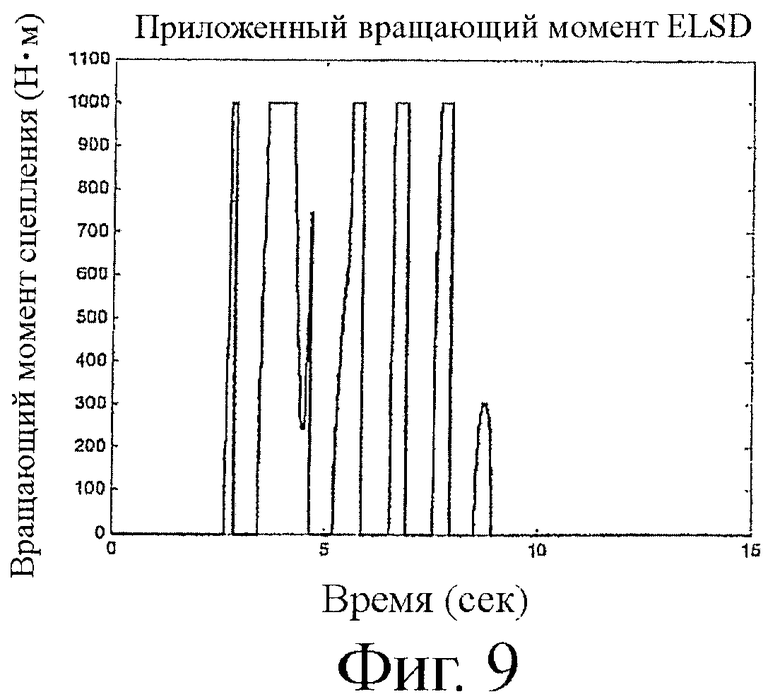
фиг.9 - график момента в муфте электронно-управляемого дифференциала повышенного трения, соответствующий графику на фиг.8;
фиг.10 - комбинированный моментальный снимок транспортного средства в динамике в соответствии с графиком фиг.8;
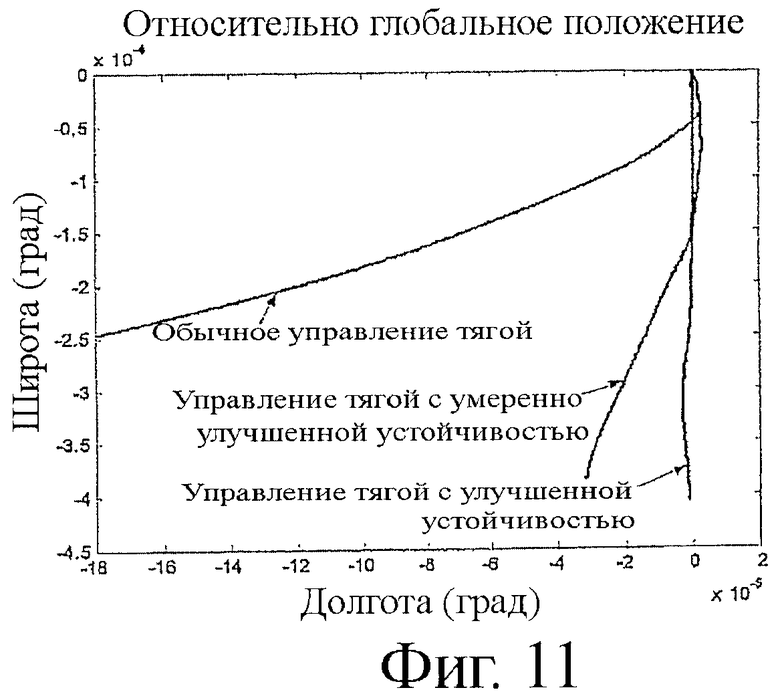
фиг.11 - 13 - график рабочих характеристик в результате испытаний транспортного средства при использовании системы управления в соответствии с вариантом осуществления настоящего изобретения;
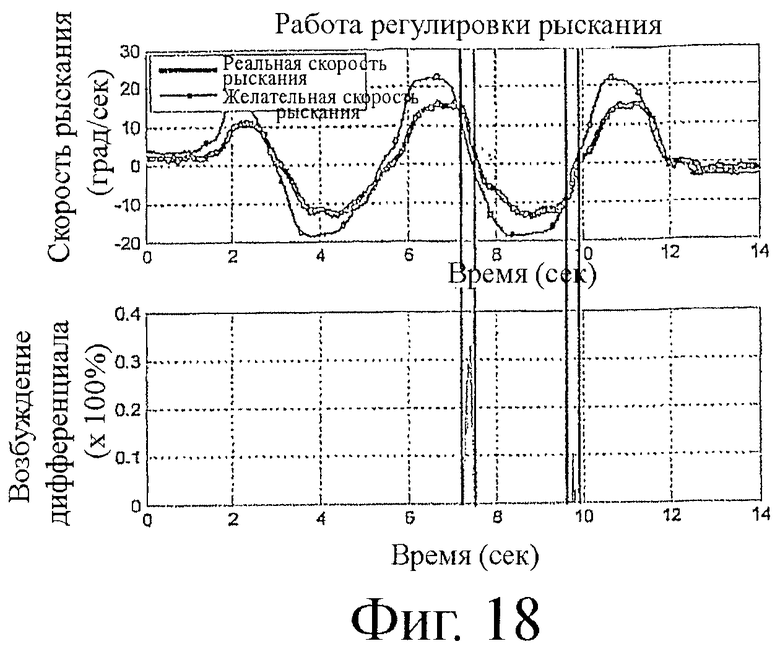
фиг.14 - 22 - график рабочих характеристик в результате испытаний транспортного средства при слаломе на относительно высокой скорости при использовании системы управления в соответствии с вариантом осуществления настоящего изобретения; и
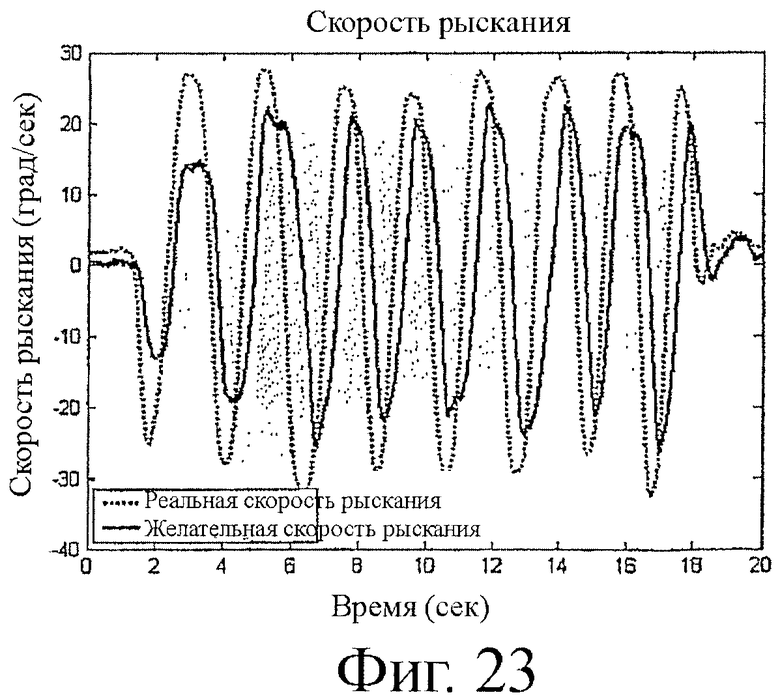
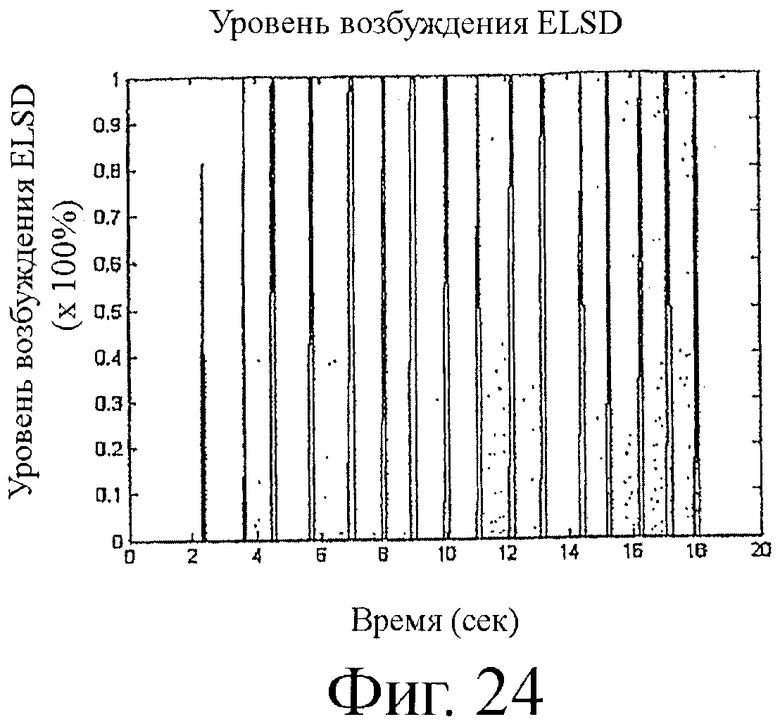
фиг.23 и 24 - график рабочих характеристик в результате испытаний транспортного средства при движении по незамкнутой траектории по синусоиде на утрамбованном снегу при использовании системы управления в соответствии с вариантом осуществления настоящего изобретения.
Осуществление изобретения
Настоящее изобретение описано следующим образом. Во-первых, представлена типичная автомобильная трансмиссия, использующая электронно-управляемый дифференциал повышенного трения. Во-вторых, проанализирована модель дифференциала повышенного трения. В-третьих, описана система автоматического контроля пробуксовки и контроля рыскания. Наконец, расчетные и экспериментальные результаты проиллюстрируют эффективность системы управления для регулирования устойчивости транспортного средства в момент старта и при движении на относительно высоких скоростях.
На фиг.1 показана конструкция трансмиссии 20, которая не является примером, ограничивающим изобретение. Трансмиссия 20 содержит электронно-управляемый дифференциал 22а, 22b повышенного трения (ЕУДП), установленный на, по меньшей мере, одном из мостов, переднем 24 и заднем 26. ЕУДП 22 можно использовать для перераспределения крутящего момента между левым и правым колесами 28, 30. В настоящем варианте осуществления величина крутящего момента, перераспределенного между левым и правым колесами 28, 30 посредством ЕУДП 22, обусловлена включением известной в уровне техники муфты (не показана), например, с помощью гидравлического или электромагнитного устройства. ЕУДП, использующиеся в трансмиссии 20, описаны в находящейся на рассмотрении заявке на патент США 11/167.474 и выданном патенте США 7051857, которые принадлежат обладателю настоящего изобретения и включены сюда в качестве ссылки.
Как показано на фиг.2 и в вышеупомянутых устройствах, ЕУДП, используемый в переднем и заднем мостах 24, 26, реализует свои функциональные возможности по ограничению скольжения благодаря управляемой мокрой многодисковой фрикционной муфте 30, расположенной между первой полуосевой конической шестерней 32 и корпусом 34 дифференциала. Включение муфты 30 ограничивает скольжение между полуосевой шестерней 32 и корпусом 34 дифференциала, благодаря чему ограничивается относительное скольжение между парой полуосей (не показаны), связанных с каждым колесом 28, 30. Эта ограничивающая скольжение функция обеспечивает перераспределение крутящего момента между полуосями, величина которого будет меньше или равна тормозному моменту в муфте. Типичные характеристики, такие как относительно высокий уровень блокирующего момента, теплоемкость, долговечность и бесшумность работы, характерны для этой конструкции сцепления. Относительное вращение корпуса 34 дифференциала и вторичного кожуха 38 приводит в действие героторный насос 40, который подает масло из картера моста к нагнетательному каналу, непосредственно связанному как с поршнем 42 включения муфты, так и с клапаном 44 регулировки давления с электромагнитным управлением. Когда клапан 44 обесточен, масло свободно проходит через клапан 44, создавая незначительное или нулевое давление на поршень 42. Когда клапан 44 включен, поток масла дросселируется клапаном 44, что создает давление на поршень 42, обеспечивая сцепление муфты 30 пропорционально уровню давления.
Оптимизация гидросистемы является существенной в конструкции ЕУДП и сутью этой оптимизации являются надлежащая конструкция насоса и выбор расположения каналов. Героторный насос 40 в конструкции ЕУДП, показанной на фиг.2, работает с высоким гидравлическим кпд при малой скорости (например, меньше чем 32 км/ч), не чрезмерно ухудшая при этом механический кпд при более высоких скоростях транспортного средства (например, приблизительно более 113 км/ч). Измерения экономии топлива на скоростной магистрали, полученные при тестировании испытательного транспортного средства, включающего в себя описанную выше конструкцию ЕУДП, не обнаружили существенных уменьшений показателей экономии топлива. Точно так же лабораторное стендовое испытание дифференциала, представленного на фиг.2, показало потерю мощности приблизительно 0,11 кВт при 113 км/ч за счет механических потерь в насосе 40.
Независимо от механической конструкции любого ЕУДП 22, время срабатывания муфты должно быть достаточным, чтобы гарантировать эффективность системы контроля устойчивости. В конструкции ЕУДП, приведенной на фиг.2, требуется минимальный электрический ток для быстрого достижения максимального момента, например, 2000 Нм при токе 2,67 А (32 Вт), особенно если сравнить с конструкциями других устройств, использующих приводы с электромагнитами или с электродвигателями. Относительно быстрое приложение и прекращение действия тормозных моментов требуется для обеих динамических операций управления трансмиссией транспортного средства (как описано здесь), а также для совместимости со многими существующими системами динамического вмешательства на основе торможения. Фиг.3 иллюстрирует график скачка тормозного момента при скачке тока на описанном здесь типовом ЕУДП. Как видно из графика, время как сцепления, так и расцепления муфты, меньше, чем 50 мсек для транспортного средства, движущегося со скоростью 64 км/час.
На фиг.4 и 5 представлена динамическая модель ЕУДП для анализа системы управления транспортным средством. Эта модель базируется на динамических свойствах муфты и особенно в условиях включенного и выключенного (при проскальзывании) состояния, в том числе переходного состояния между включенным и выключенным состояниями.
ЕУДП в общем случае имеет те же самые узлы, что и не блокирующийся дифференциал, за исключением муфты, которая обеспечивает дополнительное направление для передачи крутящего момента. На фиг.4 Тin - крутящий момент, переданный задним карданным валом, Тdiƒƒ - момент, передаваемый через дифференциал, и Тст - крутящий момент, передаваемый муфтой. Тct не обязательно тот же самый, что и приложенный крутящий момент, регулируемый электронным блоком управления транспортного средства или другим регулятором, в зависимости от состояний блокировки, разблокировки или скольжения. Предполагая, что кпд передачи крутящего момента составляет 100%, передаточное отношение от карданного вала к дифференциалу равно 1, и дифференциал имеет малую или нулевую инерционность

Поскольку момент, передаваемый дифференциалом Тdiff, равномерно распределяется к левой и правой полуосям, эффективный крутящий момент, передаваемый к задней левой инерционной массе и задней правой инерционной массе, может быть записан как:


На фиг.5 муфта смоделирована как работающий на кручение элемент пружинного амортизатора согласно следующему уравнению:

где с - коэффициент демпфирования муфты, k - коэффициент упругости муфты, и Δω=ωdiff-ωL представляет собой разность скоростей корпуса дифференциала и левой полуоси.
Муфта может далее быть смоделирована в сблокированном состоянии. Тст_max представляет тормозной момент, приложенный к дискам сцепления и управляемый регулятором транспортного средства. Однако в зависимости от состояния сцепления фактически переданный крутящий момент не обязательно совпадает с уровнем приложенного крутящего момента сцепления. Фактически переданный крутящий момент может быть ограничен  следующим образом:
следующим образом:

Состояния блокировки для дифференциала с повышенным внутренним трением моделируются следующим образом. Переход от блокированного состояния к состоянию разблокировки/скольжения возникает, когда

Моделирование при этом условии может быть получено из уравнений (2) и (3) как


Переход от состояния разблокировки/скольжения к блокированному состоянию происходит, когда

Эта модель описывает ситуацию, когда приложенный крутящий момент больше, чем разность крутящих моментов дисков сцепления, и соответственно описывает динамику блокированного состояния муфты.
Из уравнений (1) и (4) Тdiff вычисляется как

Тогда


Продифференцируем данные уравнения:


при этом 
Динамические уравнения для задней левой и правой полуосей получены следующим образом:


Кроме того, согласно кинематике дифференциала скорость дифференциала определяется следующим образом:
 или
или

Подстановка уравнений (13) и (14) в (15) дает

с учетом того, что

Используя вышеупомянутые условия перехода, динамика перераспределяющих крутящий момент устройств может быть смоделирована с помощью программного обеспечения типа Matlab/Simulink. Итоговое дискретно-временное моделирование обоих механизмов описано ниже.
Для перехода от блокированного состояния к состоянию разблокировки/скольжения имеем:


Для перехода от состояния разблокировки/скольжения к блокированному состоянию имеем


В то время как распределение крутящего момента ЕУДП может быть использовано для изменения сил тяги на колесах транспортного средства, вследствие этого изменяется динамика рыскания автомобиля. Включение муфты 30 может быть отрегулировано и настроено в соответствии с желательным динамическим рысканием автомобиля для специфических условий вождения.
На фиг.6 представлена система 50 управления автомобилем, реализующая способ повышения устойчивости с помощью перераспределения крутящего момента согласно варианту осуществления настоящего изобретения. В данном варианте осуществления система 50 управления содержит два главных блока управления: повышающий устойчивость блок управления 52 контроля пробуксовки и гасящий рыскание блок управления 54. Контролирующий блок управления 56 может быть использован для выбора управляющего воздействия в соответствии с одним или несколькими рабочими параметрами транспортного средства, такими как, например, скорость транспортного средства, определенная на основании информации, полученной от одного или нескольких датчиков 58 автомобиля. При относительно низких скоростях транспортного средства алгоритм управления пробуксовкой с повышенной устойчивостью применяется, чтобы улучшить устойчивость транспортного средства при активизированной системе автоматического контроля пробуксовки. При относительно высоких скоростях транспортного средства система автоматического контроля пробуксовки выключена и активизировано только управление гашением рыскания. Блок управления 52 и блок управления 54 демпфированием рыскания могут быть объединены или находиться в отдельном блоке управления, таком как блок электронного управления автомобилем (ЭУА), будучи интегрированы в него, либо представлять собой неаппаратный компонент (например, программное обеспечение) ЭУА автомобиля или другого блока автомобиля.
Системы автоматического контроля пробуксовки, использующие активно управляемые, полностью блокируемые дифференциалы, в общем случае достигают наилучшего продольного ускорения автомобиля, но ухудшают боковую динамику в условиях действия µ-фактора. В частности, в то время как традиционная система автоматического контроля пробуксовки с управляемым дифференциалом подходит для управления муфтой дифференциала в реальном времени на основе обратной связи по пробуксовке колес, данная система может вызвать курсовую неустойчивость благодаря чрезмерному сцеплению муфты.
Система управления устойчивостью транспортного средства согласно варианту осуществления настоящего изобретения устраняет это ограничение за счет дополнения обычного блока управления системой автоматического контроля пробуксовки блоком, улучшающим стабильность. В блоке управления 52 определяется, будет ли фактическая скорость рыскания транспортного средства превышать заранее заданную скорость рыскания следующим образом:

где r - фактическая скорость рыскания, rdes - требуемая скорость рыскания;
где Vx - продольная скорость транспортного средства,σ - угол поворота руля, L - колесная база и Kus - градиент недостаточной поворачиваемости.
Всякий раз, когда фактическая скорость рыскания транспортного средства превышает заранее заданную, муфта дифференциала расцепляется пропорционально разности между фактической и заданной скоростями рыскания, позволяя водителю автомобиля удерживать его на дороге. Повышенная стабильность системы автоматического контроля пробуксовки осуществляется корректировкой исходного или нормального приложенного к дифференциалу момента согласно следующему уравнению:

где u - разница в приложенных моментах; utraction - исходный управляющий сигнал тяги; deadband (диапазон нечувствительности) - пороговая функция для разности скоростей рыскания, которая может быть скорректирована в соответствии с навыком водителя; sat - корреляционная функция при [-α,+α], и α - величина диапазона погрешности, которая является конструктивным параметром.
Вдобавок к повышению устойчивости транспортного средства, движущегося прямолинейно и с малым сцеплением, система управления стабильностью транспортного средства может также способствовать повышению устойчивости при повороте транспортного средства. Когда действие блока управления повышенной устойчивости тяги завершено, ЕУДП может продолжать использоваться для распределения крутящего момента между левыми и правыми колесами транспортного средства. Если тормозной момент муфты дифференциала приложен во время поворота транспортного средства, устройство только передает крутящий момент от внешнего колеса внутреннему колесу, генерируя момент рыскания в направлении, противоположном повороту, увеличивая тенденцию к недостаточной поворачиваемости транспортного средства. Это явление можно объяснить, рассмотрев уравнения (19) и (20). Скорость внешнего колеса обычно больше скорости внутреннего колеса во время поворота. Включение муфты будет пытаться привести скорости и наружного колеса, и внутреннего колеса к одному и тому же значению. Скорость и ускорение внешнего колеса будут уменьшаться вместе с крутящим моментом, и наоборот, одновременно с этим крутящий момент на внутреннем колесе возрастет. Следовательно, стратегия управления основана на том принципе, что блокирование ЕУДП приводит к режиму с большей недостаточной поворачиваемостью.
Блок управления 54 демпфированием рыскания блокирует дифференциалы, чтобы увеличить демпфирование рыскания, когда фактическая скорость рыскания превышает заранее заданную скорость рыскания. Как описано выше, заданная скорость рыскания может быть определена на основании скорости транспортного средства и угла поворота рулевого колеса. Затем можно сравнить фактическую скорость рыскания с заданной скоростью рыскания в режиме реального времени. Если фактическая скорость рыскания меньше, чем заданная скорость рыскания, дифференциалы более не включаются после того, как увеличение блокирующего момента переднего и заднего дифференциалов увеличивает демпфирование рыскания, и, следовательно, уменьшает скорость рыскания. Сравнение скоростей рыскания может не активизироваться, если боковая составляющая ускорения меньше 0,03g и варьирование скорости рыскания между фактической и заданной скоростями рыскания меньше 3%. Приращение приложенного момента, которое создается блоком 54 демпфирования рыскания, может быть определено согласно следующему уравнению:

где u - приращение приложенного момента, deadband - пороговая функция для разности скоростей рыскания, которая может быть откорректирована на базе чувствительности системы управления, Kp и Ki - пропорциональное усиление и интегральное усиление соответственно, и pos - функция положительной величины. Блок управления 54 демпфированием рыскания включает ЕУДП всякий раз, когда слишком велико перерегулирование по скорости рыскания для поверхности, характеризующейся µ-фактором при постоянном µ. Режим работы блока 54 демпфирования рыскания более подробно описан в совместно рассматриваемой заявке на патент США под названием «Минимизация динамической тенденции к переворачиванию при использовании электронных дифференциалов с повышенным внутренним трением», которая включена сюда в качестве ссылки.
Динамическая модель системы 50 управления была создана средствами системы Matlab/Simulink. Динамическая модель транспортного средства, разработанная CarSim, была использована и модифицирована с целью включать в себя типовые ЕУДП, описанные выше, так, чтобы было возможно выполнить совместное моделирование. Фиг.7 демонстрирует достоверность разработанной модели. Когда высокий тормозной момент в муфте прикладывался при повороте, скорости левого и правого колес становились практически одинаковыми в течение времени сцепления.
Чтобы оценить рабочие характеристики предложенной системы 50 управления, работающей под контролем блока управления 54 демпфирования рыскания, был смоделирован стандартный маневр при двойной смене полосы для подтверждения влияния предложенного блока управления рысканием на динамику транспортного средства. Этот маневр был выполнен, чтобы оценить рабочие характеристики демпфирования рыскания в режиме привода на задние колеса. Во всех режимах скорость была 100 км/ч на относительно скользкой дороге (µ=0,6).
Фиг.8 иллюстрирует сравнение транспортного средства с блоком управления демпфированием рыскания и без него. При сравнении транспортное средство с блоком управления демпфированием рыскания превосходит по рабочим характеристикам и устойчивости транспортное средство без демпфирования рыскания, которое со временем становилось неустойчивым. Фиг.9 указывает соответствующие моменты в муфте, которые были использованы для управления механизмами, перераспределяющими крутящий момент. Муфта ЕУДП была активизирована только при избыточном повороте транспортного средства. Наконец, фиг.10 показывает моментальный снимок пробега, анимированного в CarSim.
Испытание транспортного средства было проведено на модифицированном Ford F-150, оборудованном дифференциалом марки EGerodisc™ Корпорации Eaton как на переднем, так и на заднем мосту, и модифицированном Chevrolet Silverado, оборудованном дифференциалом EGerodisc II™ Корпорации Eaton на заднем мосту. Чтобы получить объективные результаты испытаний, транспортные средства имели измерительные приборы для записи соответствующих рабочих параметров. MicroAutoBox от dSPACE использовался, для создания регулятора, работающего в режиме реального времени для транспортных средств, обеспечивающего быстрое моделирование ситуаций в среде Matlab/Simulink. Регулятор был разработан в виде встроенного в транспортное средство блока подобно ЭУА транспортного средства, и интервал дискретизации был установлен 10 мсек. Программное обеспечение эксперимента ControlDeck от dSPACE было использовано для управления, контроля и записи экспериментальных данных посредством режима графического пользовательского интерфейса (GUI).
Навигационная система транспортного средства в реальном времени, RT3000, от Oxford Technical Solutions также использовалась для теста. RT3000 представляет собой полную шестиосную инерциальную навигационную систему, комбинированную с GPS. Выходы GPS были связаны с MicroAutoBox посредством линии CAN транспортного средства при скорости двоичной передачи 0,5 Мбит/сек. Сенсорная информация, используемая в испытании на устойчивость, включала в себя датчики скорости колес, датчик угла поворота и сигналы RT3000 (например, скорость транспортного средства, глобальную координату X, глобальную координату Y, боковое ускорение, продольное ускорение, угол бокового увода и скорость рыскания).
Испытание блока управления с повышенной устойчивостью было проведено на автомобиле при прямолинейном старте при полностью открытой дроссельной заслонке по жесткой и ледяной поверхности, характеризующейся µ-фактором. Угол поворота рулевого колеса был установлен на нуль в течение всего испытания (например, незамкнутый маршрут) для объективной оценки. Погрешность значений величины рыскания в функции deadband в уравнении (23) была равна ±0,5 град/сек. Величина диапазона ошибок a имела значение 0,5 град/сек для этого испытания. Как показано на фиг.11-13, экспериментальные результаты продемонстрировали существенное повышение устойчивости транспортного средства в режиме контроля пробуксовки с повышенной устойчивостью. Транспортное средство сразу пробуксовало к ледяной части поверхности дороги при использовании только стандартного режима управления тягой. С системой повышенной курсовой устойчивости динамические силы рыскания транспортного средства были стабилизированы и транспортное средство сохраняло в основном прямолинейное движение. Минимальное нежелательное рыскание было достигнуто с низким порогом мертвой зоны, но транспортное средство стартовало медленнее. Мертвая зона, однако, может быть установлена на основании навыков водителя.
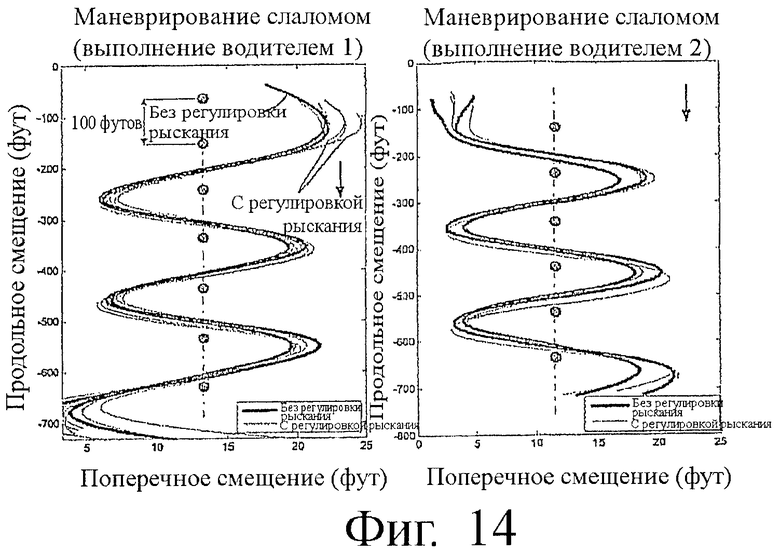
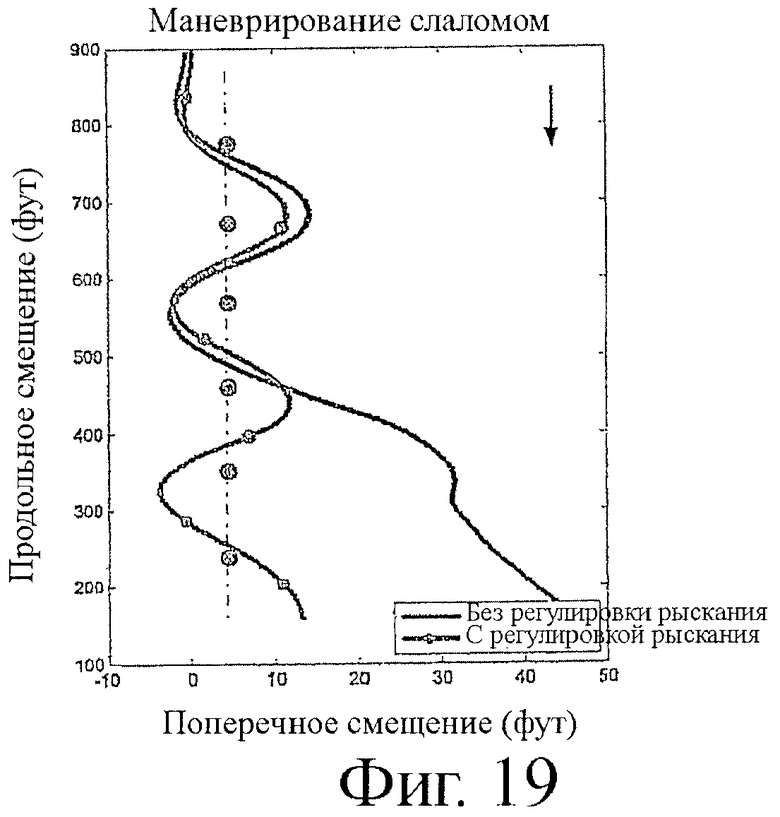
При скорости выше заранее установленной по данным датчиков транспортного средства, таким как датчики скорости колеса, блок управления демпфированием рыскания активизируется. Маневрирования слаломом, в частности, могут создать неустойчивую ситуацию для транспортного средства. Режим избыточной поворачиваемости может наблюдаться при маневрировании слаломом на поверхности, характеризующейся с низким µ-фактором; поэтому маневрирование слаломом было выбрано для оценки активированной системы управления рысканьем. На трассе было использовано семь вешек, установленных по прямой линии с интервалом приблизительно в 30 м на поверхности с плотно утрамбованным снегом. Затем водитель довел транспортное средство до скорости примерно 50 км/ч перед вхождением в траекторию слалома.
На фиг.14-24 экспериментальные результаты показывают, что активизированное управление улучшает динамику транспортного средства во время маневрирования слаломом. Однако если транспортное средство не доведено до предельно допустимых нагрузок, трудно найти различие между устройствами, имеющими систему управления рысканием и без нее, как показано на фиг.14. Отмечено, что навык водителя существенно влияет на рабочие характеристики, когда транспортное средство не ведется в режиме предельно допустимых нагрузок.
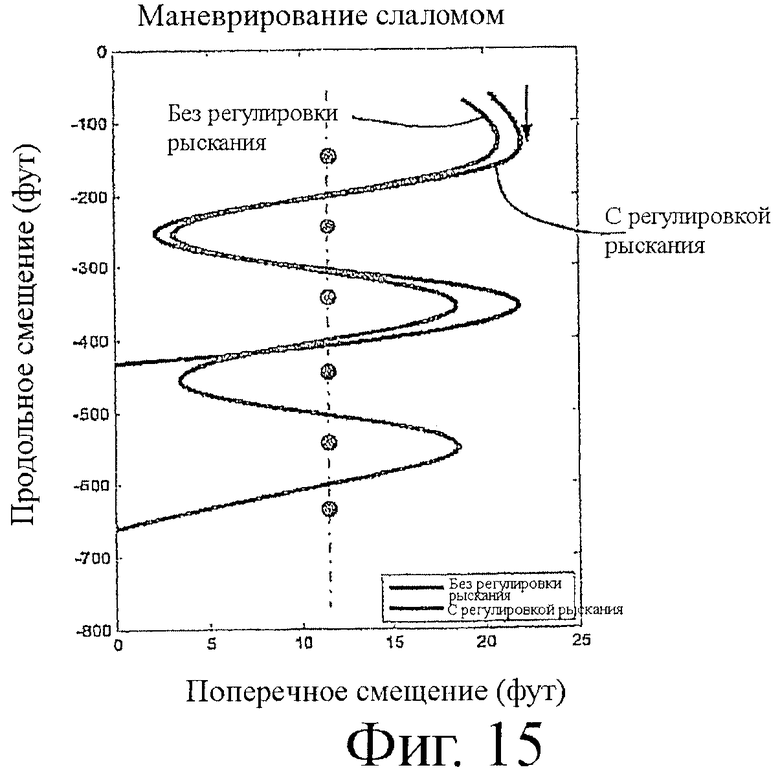
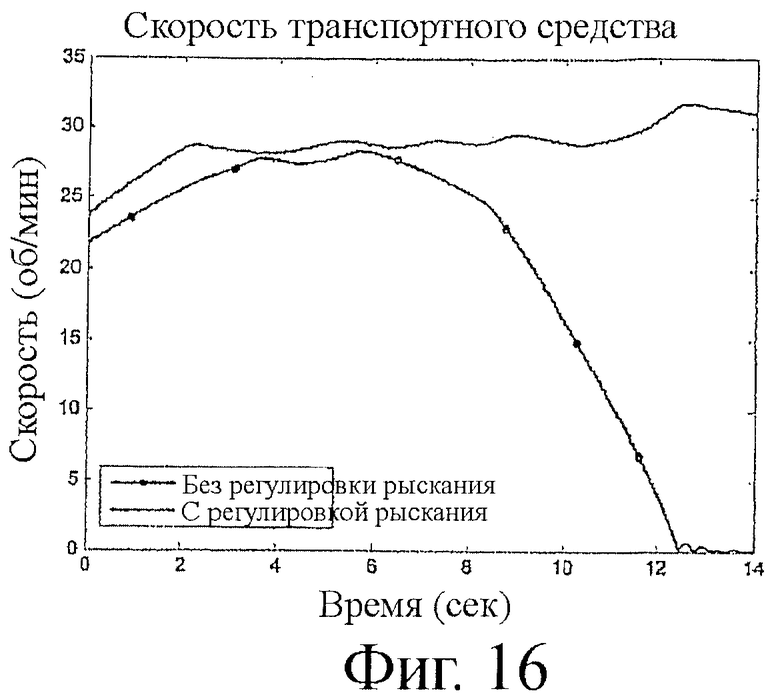
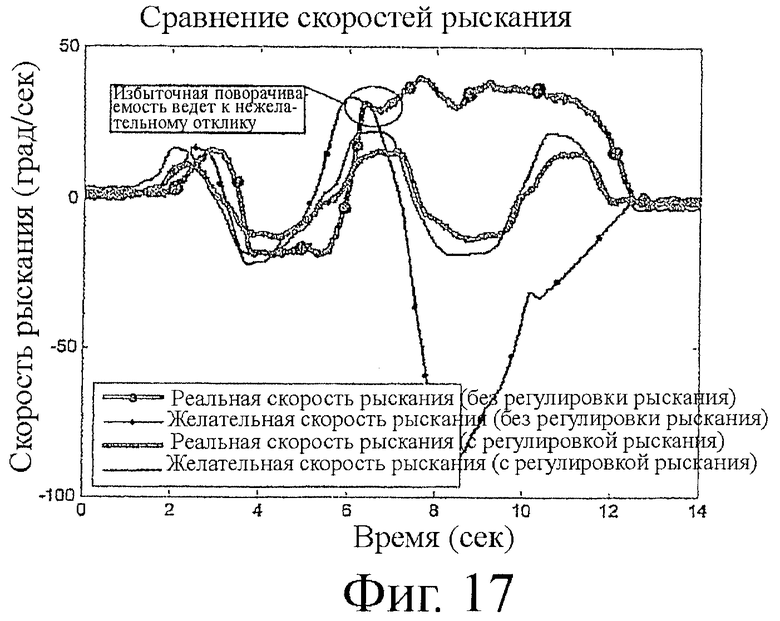
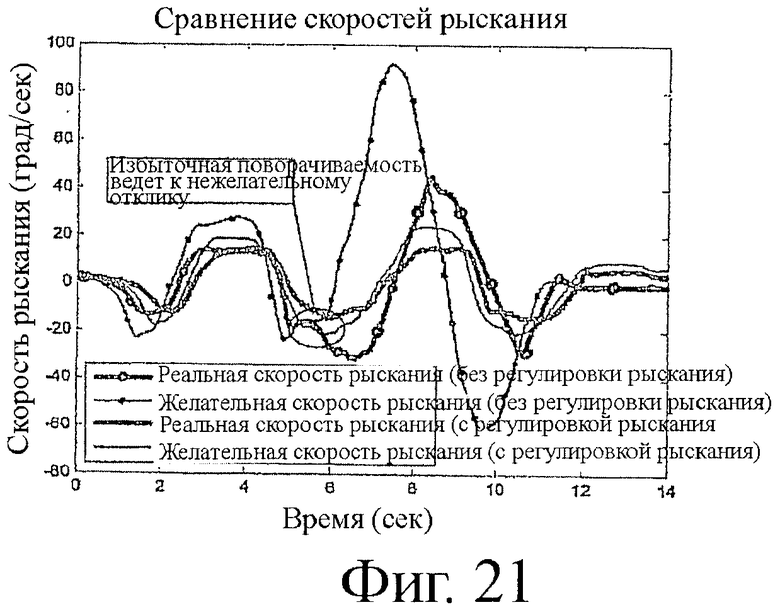
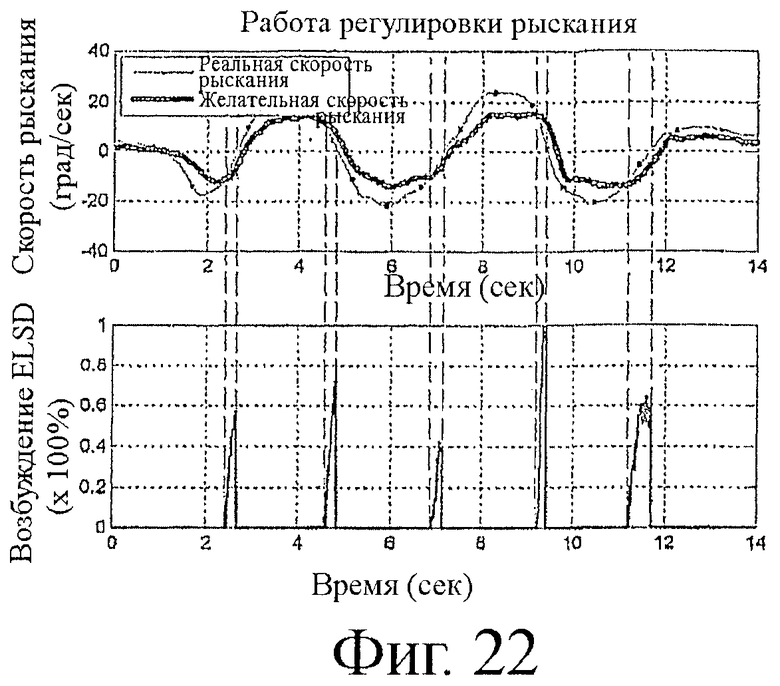
Фиг.14-22 иллюстрируют результаты испытаний для маневрирования слаломом, когда режим предельно допустимых нагрузок был достигнут с использованием блока управления 54 демпфированием рыскания и без него. Транспортное средство с блоком управления 54 сохраняло свое направление с заданной скоростью рыскания, в то время как транспортное средство без блока 54 теряло свою устойчивость и сходило с трассы. Сравнение продольной скорости транспортного средства также показано на фиг.16 и 20. Транспортное средство без блока 54 показывает неблагоприятные скоростные рабочие характеристики из-за пробуксовки. С помощью блока 54 дифференциал включался, когда регистрировался режим избыточной поворачиваемости для того, чтобы увеличить демпфирование рыскания, что помогало водителю сохранять заданную трассу.
На фиг.23 и 24 маневрирование по незамкнутому конуру с отклоненным на заданный угол рулевым механизмом на поверхности дороги, покрытой плотно утрамбованным снегом, выполнялось для оценки характеристик блока 54. Водитель вел транспортное средство с углом поворота, меняющимся по синусоиде с частотой приблизительно в 0,5 Гц, с постоянным управлением скоростью. Экспериментальные результаты, проиллюстрированные на фиг.23 и 24, показывают, что транспортное средство имело недостаточную поворачиваемость большую часть времени, за исключением участка от последнего поворота до выхода из угла, где блок 54 демпфирования рыскания корректировал режим избыточной поворачиваемости.
Настоящее изобретение описано во всех деталях в предшествующем описании, и предполагается, что различные изменения и модификации настоящего изобретения станут очевидными для специалистов из чтения и понимания описания. Подразумевается, что все такие изменения и модификации включены в изобретение, поскольку они находятся в рамках прилагаемой формулы изобретения.





Изобретение относится к активной системе управления устойчивостью транспортного средства. Система управления содержит дифференциал, блок управления, повышающий курсовую устойчивость, блок управления устойчивостью. Блок управления, повышающий курсовую устойчивость, выполнен с возможностью обеспечения работы дифференциала в первом и втором рабочих режимах транспортного средства, а также в соответствии с заданной разностью сигнала приложенного крутящего момента. Разность сигнала равна исходной разности приложенного крутящего момента, умноженного на модификатор. В числителе модификатор имеет разность между величиной диапазона ошибок и произведением корреляционной функции, функции «мертвой зоны» и разности между фактической скоростью рыскания автомобиля и заданной скоростью рыскания. В знаменателе модификатор имеет величину диапазона ошибок. Блок управления устойчивостью выполнен с возможностью управления дифференциалом при заданной или более высокой скорости движения транспортного средства. Технический результат заключается в повышении устойчивости транспортного средства. 2 з.п. ф-лы, 24 ил.
1. Система (50) управления для автомобиля, имеющего первые и вторые колеса (28, 30), содержащая: дифференциал (22), предназначенный для распределения крутящего момента между первыми и вторыми колесами (28, 30), блок управления (52), повышающий курсовую устойчивость, для управления дифференциалом (22) с момента старта транспортного средства до заданной скорости движения, причем блок управления (52) выполнен с возможностью обеспечения работы дифференциала (22) в первом рабочем режиме транспортного средства, в соответствии с, по меньшей мере, одним рабочим параметром транспортного средства, указывающим на низкий тяговый режим, и далее с возможностью управлять дифференциалом (22) во втором рабочем режиме транспортного средства при низком тяговом режиме по разности между фактической и заранее заданной скоростью рыскания транспортного средства, и блок управления (54) устойчивостью для управления дифференциалом (22) при заданной или более высокой скорости движения транспортного средства, блок управления (52) выполнен с возможностью управления дифференциалом (22) в соответствии с заданной разностью сигнала приложенного крутящего момента, которая равна исходной разности приложенного крутящего момента, умноженного на модификатор, причем в числителе модификатор имеет разность между величиной диапазона ошибок и произведением корреляционной функции, функции «мертвой зоны» и разности между фактической скоростью рыскания автомобиля и заданной скоростью рыскания, а в знаменателе модификатор имеет величину диапазона ошибок.
2. Система управления по п.1, в которой блок управления (52) выполнен с возможностью регулировки включения дифференциала (22) при низком тяговом режиме в соответствии с разностью между фактической скоростью рыскания транспортного средства и заранее заданной скоростью рыскания транспортного средства.
3. Система управления по п.1, в которой в первом рабочем состоянии автомобиля фактическая скорость рыскания меньше или практически равна заданной скорости рыскания, а во втором рабочем состоянии автомобиля фактическая скорость рыскания больше, чем заданная скорость рыскания.
| Способ изготовления круглых труб | 1988 |
|
SU1616743A1 |
| JP 7052678 А, 28.02.1995 | |||
| DE 10333654 А1, 24.02.2005 | |||
| RU 97107345 А, 27.04.1999. | |||

