Изобретение относится к области транспортного машиностроения и может быть использовано при разработке конструкции задних и передних ведущих мостов для легковых автомобилей (4к2), в том числе и электромобилей с однодвигательным приводом. Целями предлагаемого изобретения являются повышение курсовой устойчивости, улучшение управляемости автомобиля, как с задним, так и с передним приводом при скоростном непрямолинейном движении и при неблагоприятных дорожных условиях, снижение нагрузки водителя по управлению автомобилем и повышение безопасности движения, а также уменьшение поперечного габарита МКДМ для возможности его использования в сочетании с независимой подвеской ведущих колес.
Курсовая устойчивость, обеспечивающая безопасность скоростного непрямолинейного движения автомобиля, и его хорошая управляемость в различных дорожных условиях прежде всего связаны с оптимальной поворачиваемостью автомобиля, при которой она соответствует, как известно из теории автомобиля [1], небольшой недостаточной поворачиваемости, исключающей при различных условиях непрямолинейного движения и изменении относительной доли весовой нагрузки ведущего моста (заднего или переднего) возможность потери курсовой устойчивости. Единственным способом обеспечить соответствие необходимого уровня поворачиваемости автомобиля меняющимся условиям его непрямолинейного движения (скорости, кривизны траектории, а также величины и соотношения коэффициентов сцепления и сопротивления качению внутренних и наружных колес, зависимых от наличия и вида дорожного покрытия и др.) является управляемое распределение крутящих моментов между колесами ведущего моста автомобиля, влияющее на распределение боковых реакций и углов бокового увода ведомой и ведущей оси автомобиля.
В настоящее время основными механизмами распределения крутящих моментов в трансмиссии легковых автомобилей (4к2) являются межколесные самоблокирующиеся дифференциалы, а также тормозная система ABS, используемая в электронных системах курсовой устойчивости или динамической стабилизации “ESP” и “VSA”b качестве исполнительного механизма для автоматического подтормаживания либо внутреннего заднего, либо наружного переднего колеса. Однако в этих системах механизм подтормаживания колес включается в работу по перераспределению крутящих моментов ведущих колес, только эпизодически, в критических для безопасности движения ситуациях, например, при завышенной скорости движения. В остальных случаях разность крутящих моментов колес определяется только самоблокирующимися дифференциалами, которые при непрямолинейномдвижении не способны перераспределять момент от более нагруженного внутреннего к менее нагруженному ведущему колесу и потому полезны только при избыточной поворачиваемости автомобиля. Кроме того, использование системы ABS для перераспределения крутящих моментов связано с большими, особенно при скоростном движении, потерями энергии в тормозах и перерасходом топлива. Поэтому она непригодна для непрерывного регулирования разности крутящих моментов ведущих колес с целью поддержания оптимальной поворачиваемости автомобиля.
Альтернативным способом регулирования разности крутящих моментов ведущих колес является бесступенчатое регулирование их разности частоты вращения без изменения средней величины частоты вращения колес. В этом случае разнонаправленное изменение окружных скоростей ведущих колес вызывает перераспределение их скоростных потерь, связанных с тангенциальной эластичностью шин, и соответствующую разность их крутящих моментов. При этом стабилизация поворота автомобиля с недостаточной поворачиваемостью обеспечивается увеличением разности частоты вращения наружного и внутреннего ведущих колес, вызывающим положительную разность их касательных сил тяги и соответствующего стабилизирующего поворачивающего момента, а при избыточной поворачиваемости автомобиля - уменьшением разности вращения указанных колес, вызывающим отрицательную разность их касательных сил тяги и соответствующего стабилизирующего момента сопротивления повороту. Такой способ формирования стабилизирующего момента при повороте автомобиля, например, при использовании регулируемого межколесного дифференциала, на порядок экономичнее в сравнении с вышеуказанным подтормаживанием колес в системах ESP и VSA, поскольку мощность, теряемая в этом случае, пропорциональна разности частоты вращения колес, а не частоте вращения подтормаживаемого колеса.
В патенте [2] "Управляемый межколесный (межосевой) дифференциал" вместо дифференциала с межколесной дифференциальной связью предложен механизм для разнонаправленного регулирования частоты вращения ведущих колес. Он содержит два циклоидальных редуктора с входными, выходными и управляющими звеньями, причем последние связаны между собой кинематической связью, которая обеспечивает их одинаковую частоту вращения в противоположных направлениях. Эта связь выполнена в виде двух соосных управляющих валов, расположенных параллельно оси ведущего моста. На них закреплены эксцентрики циклоидальных редукторов, а их внутренние хвостовики с помощью одинаковых конических шестерен связаны с ведущей шестерней управляющего электродвигателя с регулируемой частотой вращения, пропорционально которой изменяется разность частоты вращения выходных звеньев механизма. Необходимое передаточное отношение между управляющими валами и выходными звеньями благодаря циклоидальному зацеплению, которое может достигать, по меньшей мере, 50, позволяет использовать электродвигатель для управления частотой вращения управляющих валов в активном режиме с подводом мощности от силовой установки. Но использовать электродвигатель в режиме генератора и увеличивать разницу крутящих моментов внутреннего и наружного колеса в случае избыточной поворачиваемости невозможно, так как передача крутящего момента в обратном направлении (от колес к электродвигателю) при передаточном отношении 1/50 вызывает самоторможение циклоидальной пары.
Регулируемый дифференциальный механизм с межколесной дифференциальной связью и с системой автоматического управления (САУ) с целью повышение маневренности и поперечной устойчивости непрямолинейного движения, проходимости в экстремальных дорожных условиях полноприводного АТС с механической трансмиссией был предложен в патенте №2706681 RU [3]. Этот дифференциальный механизм предназначался для установки в оба ведущих моста и раздаточную коробку. С целью упрощения конструкции трансмиссии полноприводного АТС и повышения точности работы САУ он был использован в патенте №2749974 RU [4], являющимся наиболее близким аналогом предлагаемого изобретения. Регулируемый дифференциальный механизм установлен только в заднем неотключаемом мосту. Он содержит два однорядных планетарных механизма, ведущими звеньями которых являются коронные шестерни, установленные на одном валу с ведомой шестерней главной передачи, а ведомыми звеньями - водила, связанные с полуосями заднего моста, и вал межколесной дифференциальной связи. Этот вал кинематически связан с солнечными шестернями планетарных механизмов парой понижающих шестеренных передач с однополюсным и двухполюсным за счет паразитной шестерни зацеплением и одинаковым передаточным отношением. За счет разнонаправленного вращения солнечных шестерен обеспечивается, либо разблокированный режим МКДМ при свободном вращении вала дифференциальной связи, либо частично блокированный - при подтормаживании указанного вала, либо блокированный режим при принудительном регулируемом вращении вала дифференциальной связи, хвостовик которого соединен с объемной реверсируемой и обратимой гидромашиной героторного или героллерного типа. Гидромашина подключена к гидравлической системе с питанием от гидроаккумулятора, содержащей дроссельный регулятор расхода и переливной клапан с пропорциональным электроуправлением, а также три двухпозиционных электроуправляемых золотника, обеспечивающих реверс, разблокировку и переключение режимов работы гидромашины. В переднем отключаемом ведущем мосту установлен конический межколесный блокируемый дифференциал (МКД), снабженный блокирующей фрикционной муфтой, гидроподжимной механизм которой посредством двухпозиционного электроуправляемого трехходового золотника соединяется либо со сливной магистралью, либо с выходом установленного в нагнетательной магистрали гидравлической системы редукционного клапана с пропорциональным электроуправлением. Раздаточная коробка снабжена четырехплунжерным гидравлическим механизмом переключения, управляемым двумя двухпозиционными трехходовым и четырехходовым золотниками и обеспечивающим три положения вилки переключения: в крайних положениях вилки - отключение и включение переднего ведущего моста при разблокированном межосевом дифференциале (МОД), в нейтральном положении - блокировку МОД.
Однако предложенный в патенте [3] и использованный в патенте [4] регулируемый дифференциальный механизм обладает тремя существенными конструктивными недостатками. Во-первых, у него слишком увеличен относительно ширины колесной колеи поперечный габаритный размер, что не позволяет его использовать в "разрезных" ведущих мостах легковых автомобилей при независимой подвеске и, особенно, в передних ведущих мостах при поперечном расположении двигателя с коробкой перемены передач из-за необходимости обеспечить достаточную для поворота управляемых колес ширину колесных ниш и размещения полуосей. Во-вторых, кинематическая связь солнечных шестерен каждого планетарного механизма с управляющей гидромашиной посредством одной понижающей пары шестерен обеспечивает передаточное отношение iг от гидромашины к ведущему колесу, не превышающее 9…11. В то же время частота вращения предложенной гидромашины героторного типа с рабочим объемом в диапазоне 50…100 см3/об в режиме гидромотора ограничена снизу ωmin=1.05 рад/с из-за нарушения устойчивого вращения. Исходя из приближенного равенства относительной кривизны круговой траектории движения (соотношения ширины колеи В колес и радиуса R0 круговой траектории движения) и относительной (по отношению к скорости движения) разности ΔV/V окружных скоростей наружного и внутреннего ведущих колес, максимально допустимый радиус R0max при iг=9, ω=1.05 рад/с, В=1.46 м и rк=0.33 м в диапазоне скорости движения V=100…150 км/час изменяется от 1050 м до 1576 м. Но этого недостаточно (в соответствии с ГОСТ-33475-2015) для непрямолинейного движения с указанными скоростями на участках сопряжения при повороте прямолинейных трасс с большими радиусами закругления. Поэтому в этих условиях нормальная работа гидромашины в режиме гидромотора при iг=9 не обеспечивается. И наконец, снижать недостаточную поворачиваемость либо устранять чрезмерную избыточную поворачиваемость за счет изменения разности крутящих моментов ведущих колес более эффективно не посредством регулирования частоты вращения гидромашины в режиме гидромотора и разности частоты вращения ведущих колес, а непосредственно путем изменения давления во входной рабочей полости гидромашины. В этом случае нелинейная зависимость разности крутящих моментов колес от разности их частоты вращения заменяется практически пропорциональной связью разности крутящих моментов колес и перепада давления между входной и выходной полостями гидромашины. Кроме того, в этом случае исключается возможность неустойчивой работы автоматики из-за нелинейной расходной характеристики дроссельного регулятора расхода при малой или близкой к нулю частоте вращения гидромашины. А при регулировании давления во входной полости гидромашины такой проблемы не возникает.
В процессе управления задним регулируемым МКДМ при малом центростремительном ускорении, меньшем нижнего порогового значения, САУ функционирует, как следящая система, обеспечивая зависимость перепада давления Δр гидромашины, работающей в режиме гидронасоса, и соответствующего блокирующего момента от квадрата разности частоты вращения задних ведущих колес подобно самоблокирующемуся "по скорости" межколесному дифференциалу.
При больших значениях этого ускорения САУ функционирует как автоматический регулятор, поддерживающий заданное значение регулируемого параметра kп. В этом качестве невозможно использовать известный в теории автомобиля показатель W статической чувствительности автомобиля к управлению, равный отношению угловой скорости поворота автомобиля ω0 к углу поворота θ передних колес [1], поскольку он зависит не только от углов бокового увода передней и задней оси колес, но и от скорости V поступательного движения и длины колесной базы L. Поэтому в качестве регулируемого параметра kп предложено произведение W и соотношения (L/V), зависящее при заданном угле θ только от углов бокового увода передней и задней оси колес, являющееся безразмерной величиной и характеризующее уровень и характер поворачиваемости автомобиля. Из выражения  получена формула для определения kп на основе измеряемых курсовых углов центральных точек задней ψ2 и передней ψ1 оси колес
получена формула для определения kп на основе измеряемых курсовых углов центральных точек задней ψ2 и передней ψ1 оси колес  где
где  - абсолютная величина расчетного угла поворота передних колес. Этот безразмерный параметр, являющийся показателем статической поворачиваемости автомобиля, был предложен в качестве регулируемого параметра САУ заднего МКДМ. При избыточной поворачиваемости kп>1, при нейтральной - kп=1, при недостаточной - 0<kп<1. Чтобы исключить возможность избыточной поворачиваемости при недостаточной точности "косвенного" измерения фактической величины kп, автоматически поддерживаемая его величина kп0 должна быть несколько занижена относительно единицы, и потому предложена kп0=0.8…0.85, соответствующая небольшой недостаточной поворачиваемости. При меньшей величине kп ошибка регулирования
- абсолютная величина расчетного угла поворота передних колес. Этот безразмерный параметр, являющийся показателем статической поворачиваемости автомобиля, был предложен в качестве регулируемого параметра САУ заднего МКДМ. При избыточной поворачиваемости kп>1, при нейтральной - kп=1, при недостаточной - 0<kп<1. Чтобы исключить возможность избыточной поворачиваемости при недостаточной точности "косвенного" измерения фактической величины kп, автоматически поддерживаемая его величина kп0 должна быть несколько занижена относительно единицы, и потому предложена kп0=0.8…0.85, соответствующая небольшой недостаточной поворачиваемости. При меньшей величине kп ошибка регулирования  В этом случае САУ включает подачу рабочей жидкости из гидроаккумулятора через дроссельный регулятор потока в гидромашину, работающую в режиме гидромотора. Ошибка устраняется в результате увеличения разности частоты вращения и разности касательных сил тяги наружного и внутреннего ведущих задних колес за счет стабилизирующего поворачивающего момента в плоскости качения автомобиля. А при Δk<0 рабочая жидкость из гидромашины, работающей в режиме гидронасоса, перепускается переливным клапаном в сливную магистраль. Ошибка Δk устраняется за счет увеличения регулируемого переливным клапаном давления на выходе гидромашины и торможения солнечной шестерни планетарного механизма внутреннего колеса, вращающейся в обратном относительно колеса направлении, и вызывающего увеличение частоты вращения внутреннего колеса и его касательной силы тяги при симметричном уменьшении этих параметров у наружного колеса. В этом случае стабилизирующее действие оказывает момент сопротивления повороту автомобиля. По мере увеличения перепада давления разность частоты вращения наружного и внутреннего задних ведущих колес может уменьшиться до нуля. Если при этом ошибка регулирования сохраняется (Δk<0), гидромашина автоматически переключается обратно в режим гидромотора с одновременным изменением направления своего вращения. За счет положительной разности частоты вращения внутреннего и наружного задних колес момент сопротивления повороту автомобиля дополнительно возрастает до полной компенсации ошибки регулирования и устранения избыточной поворачиваемости (при условии наличия запаса сцепления у внутреннего ведущего колеса).
В этом случае САУ включает подачу рабочей жидкости из гидроаккумулятора через дроссельный регулятор потока в гидромашину, работающую в режиме гидромотора. Ошибка устраняется в результате увеличения разности частоты вращения и разности касательных сил тяги наружного и внутреннего ведущих задних колес за счет стабилизирующего поворачивающего момента в плоскости качения автомобиля. А при Δk<0 рабочая жидкость из гидромашины, работающей в режиме гидронасоса, перепускается переливным клапаном в сливную магистраль. Ошибка Δk устраняется за счет увеличения регулируемого переливным клапаном давления на выходе гидромашины и торможения солнечной шестерни планетарного механизма внутреннего колеса, вращающейся в обратном относительно колеса направлении, и вызывающего увеличение частоты вращения внутреннего колеса и его касательной силы тяги при симметричном уменьшении этих параметров у наружного колеса. В этом случае стабилизирующее действие оказывает момент сопротивления повороту автомобиля. По мере увеличения перепада давления разность частоты вращения наружного и внутреннего задних ведущих колес может уменьшиться до нуля. Если при этом ошибка регулирования сохраняется (Δk<0), гидромашина автоматически переключается обратно в режим гидромотора с одновременным изменением направления своего вращения. За счет положительной разности частоты вращения внутреннего и наружного задних колес момент сопротивления повороту автомобиля дополнительно возрастает до полной компенсации ошибки регулирования и устранения избыточной поворачиваемости (при условии наличия запаса сцепления у внутреннего ведущего колеса).
Необходимо отметить, что предложенный диапазон (0.8…0.85) автоматически поддерживаемой величины kп0 занижен, поскольку рассчитан на чрезмерно завышенную предполагаемую ошибку косвенного измерения величины kп. и потому не позволит реализовать потенциальные возможности предложенного регулируемого МКДМ.
Для определения аналоговых ошибок регулирования и формирования аналоговых управляющих сигналов исполнительными механизмами с пропорциональным электроуправлением и цифровых команд дискретного электроуправления двухпозиционными золотниками гидравлической системы САУ снабжена вычислительным блоком, в который поступают сигналы от датчиков частоты вращения всех четырех колес ω1л, ω1п, ω2л, ω2п, углов поворота правого θп и левого θл управляемых колес, давления на входе p1 и выходе р2 гидромашины, а также от двух двухкомпонентных акселерометров - проекций j1z, j1u, j2z, j2u центростремительного ускорения в центральных точках передней и задней оси колес на оси чувствительности z1, u1 переднего z2, u2 заднего акселерометра, которые направлены под углом 45° относительно продольной и поперечной оси автомобиля. Кроме того, в трансмиссии установлены датчики включения передачи заднего хода z1 и торможения z2 автомобиля, а также два конечных микровыключателя в раздаточной коробке, определяющих три положения вилки переключения: -z, 0, +z.
Расчетный угол поворота передних колес, равный углу поворота переднего "условного" колеса с осью поворота в центральной точке передней оси колес определяется в вычислительном блоке по формуле:  Абсолютная величина его определяется из произведения
Абсолютная величина его определяется из произведения  - дискретный параметр, знак которого определяется направлением поворота колес (вправо или влево). Курсовые углы центральных точек передней оси колес ψ1 и задней оси ψ2 определяют направление векторов абсолютных скоростей этих точек относительно продольной оси автомобиля. Разность этих углов равна разности Δβ=β2 - β1 - углов между соответствующими векторами j1, j2 центростремительного ускорения и осями чувствительности акселерометров. Эти углы равны обратным тригонометрическим функциям соотношений jz1/ju1 и jz2/ju2, измеряемых проекций векторов j1 и j2 на оси чувствительности z и u переднего и заднего акселерометров и при
- дискретный параметр, знак которого определяется направлением поворота колес (вправо или влево). Курсовые углы центральных точек передней оси колес ψ1 и задней оси ψ2 определяют направление векторов абсолютных скоростей этих точек относительно продольной оси автомобиля. Разность этих углов равна разности Δβ=β2 - β1 - углов между соответствующими векторами j1, j2 центростремительного ускорения и осями чувствительности акселерометров. Эти углы равны обратным тригонометрическим функциям соотношений jz1/ju1 и jz2/ju2, измеряемых проекций векторов j1 и j2 на оси чувствительности z и u переднего и заднего акселерометров и при  и
и  а при Kθ=-1 arctg заменяется на arcctg.
а при Kθ=-1 arctg заменяется на arcctg.
В предлагаемой формуле для определения показателя поворачиваемости kп величина  где L - длина колесной базы автомобиля, a R0 - текущая величина радиуса круговой траектории движения. Например, при L=2.475 м (LADA GRAN-ТА) в диапазоне 100…120 км/час скорости движения и соответствующими минимальными радиусами закругленных участков автотрасс 600…1200 м (по нормам СП. 13330) величина ДР составит 0.004…0.002 рад (0.23°…0.115°). Относительная ошибка косвенного измерения ее определяется формулой
где L - длина колесной базы автомобиля, a R0 - текущая величина радиуса круговой траектории движения. Например, при L=2.475 м (LADA GRAN-ТА) в диапазоне 100…120 км/час скорости движения и соответствующими минимальными радиусами закругленных участков автотрасс 600…1200 м (по нормам СП. 13330) величина ДР составит 0.004…0.002 рад (0.23°…0.115°). Относительная ошибка косвенного измерения ее определяется формулой  - абсолютные ошибки косвенного измерения β1 и β2. Чтобы ограничить δ(Δβ) величиной, например, 0.05, сумма абсолютных ошибок косвенного измерения углов β1 и β2 в указанных случаях не должна превышать 2⋅10-4…1⋅10-4 рад, а относительная ошибка косвенного измерения каждого из этих углов не должна превышать 5.73⋅10-3%…2.865⋅10-3%, соответственно. Естественно, что относительная погрешность используемых для измерения углов β1 и β2 акселерометров должна быть еще меньше. По данным [5] относительная погрешность современных емкостных акселерометров МЭМС составляет 0.1%. Поэтому предлагаемая формула определения показателя поворачиваемости kп в САУ МКДМ на основе применения двухосевых акселерометров с осями чувствительности, направленными под углом 45° в горизонтальной плоскости относительно продольной и поперечной оси автомобиля для практического применения непригодна.
- абсолютные ошибки косвенного измерения β1 и β2. Чтобы ограничить δ(Δβ) величиной, например, 0.05, сумма абсолютных ошибок косвенного измерения углов β1 и β2 в указанных случаях не должна превышать 2⋅10-4…1⋅10-4 рад, а относительная ошибка косвенного измерения каждого из этих углов не должна превышать 5.73⋅10-3%…2.865⋅10-3%, соответственно. Естественно, что относительная погрешность используемых для измерения углов β1 и β2 акселерометров должна быть еще меньше. По данным [5] относительная погрешность современных емкостных акселерометров МЭМС составляет 0.1%. Поэтому предлагаемая формула определения показателя поворачиваемости kп в САУ МКДМ на основе применения двухосевых акселерометров с осями чувствительности, направленными под углом 45° в горизонтальной плоскости относительно продольной и поперечной оси автомобиля для практического применения непригодна.
Для определения текущих значений kп в вычислительном блоке предложена следующая формула:  где θ0 - минимальная величина , соответствующая переходу от непрямолинейного движения к прямолинейному и обратно, определяется, как отношение Δβ0/kп0. Δβ0 - минимальное значение разности Δβ, соответствующее заданному предельному для непрямолинейного движения радиусу
где θ0 - минимальная величина , соответствующая переходу от непрямолинейного движения к прямолинейному и обратно, определяется, как отношение Δβ0/kп0. Δβ0 - минимальное значение разности Δβ, соответствующее заданному предельному для непрямолинейного движения радиусу  круговой траектории движения, Sθ0 - дискретный параметр, равный единице при
круговой траектории движения, Sθ0 - дискретный параметр, равный единице при  и равный нулю при
и равный нулю при  При R0≥R0 lim и
При R0≥R0 lim и  kп=kп0 ошибка регулирования отсутствует и САУ в режиме автоматического регулятора не функционирует.
kп=kп0 ошибка регулирования отсутствует и САУ в режиме автоматического регулятора не функционирует.
Кроме указанной выше проблемы с определением kп возможность выбора задаваемой величины R0 lim остается под вопросом. Согласно ГОСТ-33475-2015 при малых углах поворота трассы сопрягаемые участки трассы представляют собой кривые постоянной или переменной кривизны с наименьшими радиусами, изменяющимися в зависимости от угла поворота трассы в довольно широких пределах. Например, в диапазоне угла поворота трассы от 8° до 2° требуемый наименьший радиус изменяется от 2500 до 20000 м. Поэтому предложенный диапазон величины θ0=0.2°…0.25° ничем не обоснован. Кроме того, согласно ГОСТ33997-2016 п.5.2.2 отсчет суммарного люфта поворота руля производится не от нулевого угла поворота управляемых колес, а от угла (0.06±0.01)°, соответствующего "началу поворота управляемого колеса". И в связи с этим дискретный параметр Kθ в области нечувствительности ±(0.05…0.07)° должен быть равен нулю, в которой автомобиль движется прямолинейно и Δβ0 и kп0 равны нулю. Поэтому неравный нулю Δβ0 в формуле определения kп, и отсутствие указанной зоны нечувствительности в соответствующем релейном звене вычислительного блока является ошибкой.
Использование САУ, как "следящей" системы, при ведомом (насосном) режиме гидромашины и малой величине центростремительного ускорения за счет формирования стабилизирующего момента сопротивления повороту на автомобилях (4к2) оправдано лишь для заднеприводных машин при повышенной относительной весовой нагрузке задней ведущей оси (более 50%), вызывающей их избыточную поворачиваемость. При меньшей относительной весовой нагрузке ее, не говоря уже о переднеприводных автомобилях (4к2) с присущей им недостаточной поворачиваемостью, этот режим вызывет увеличение момента сопротивления повороту и бокового увода передней оси колес. Поэтому использование этого режима САУ на автомобилях (4к2) с задним приводом ограничено, а с передним приводом нецелесообразно.
В вычислительном блоке определяется разность  являющаяся ошибкой регулирования в режиме автоматического регулятора. С целью уменьшения статической ошибки регулирования в этом режиме величина
являющаяся ошибкой регулирования в режиме автоматического регулятора. С целью уменьшения статической ошибки регулирования в этом режиме величина  корректируется в изодромном звене. На основе выходного скорректированного аналогового сигнала Δk в вычислительном блоке сформированы аналоговые управляющие сигналы Δk1, Δk2 для исполнительных механизмов САУ: для дроссельного регулятора расхода
корректируется в изодромном звене. На основе выходного скорректированного аналогового сигнала Δk в вычислительном блоке сформированы аналоговые управляющие сигналы Δk1, Δk2 для исполнительных механизмов САУ: для дроссельного регулятора расхода  для переливного клапана
для переливного клапана  где
где  - задаваемое в режиме следящей системы значения регулируемого давления в редукционном и переливном клапанах; а SΔj, Sp, SΔω, Sδω, Sθ0 - дискретные параметры. Sp=0 при Δр≤0 в случаях перехода работы гидромашины из режима гидромотора в режим гидронасоса и обратного перехода из режима гидронасоса в режим гидромотора при Δр≤(-Δpmin), где величина Δpmin определяется суммарными механическими и гидравлическими потерями при холостом вращении гидромашины, а при Δр>0 Sp=1; SΔω=0 при
- задаваемое в режиме следящей системы значения регулируемого давления в редукционном и переливном клапанах; а SΔj, Sp, SΔω, Sδω, Sθ0 - дискретные параметры. Sp=0 при Δр≤0 в случаях перехода работы гидромашины из режима гидромотора в режим гидронасоса и обратного перехода из режима гидронасоса в режим гидромотора при Δр≤(-Δpmin), где величина Δpmin определяется суммарными механическими и гидравлическими потерями при холостом вращении гидромашины, а при Δр>0 Sp=1; SΔω=0 при  а при
а при  Sδω определяется как разность
Sδω определяется как разность  и при
и при  а при
а при 
Однако в сформированных аналоговых сигналах управления Δk1 для дроссельного регулятора расхода и Δk2 для переливного клапана не учитывается, что в момент включения золотника - 85 (фиг. 5) и САУ дроссельный регулятор закрыт, а перепад давления переливного клапана практически равен нулю. В этом случае - Sp=0 и при SΔω=0 Δk2=Δk и Δk1=0. Таким образом при Δk>0 в случае недостаточной поворачиваемости дроссельный регулятор остается в начальном закрытом положении, а при Δk<0 в случае избыточной поворачиваемости переливной клапан также остается в начальном положении, поскольку для увеличения давления нужна не отрицательная, а положительная величина Δk. В обоих случаях МКДМ остается разблокированным. Таким образом предложенные формулы аналоговых сигналов управления не обеспечивают работу САУ заднего МКДМ в режиме автоматического регулятора.
Кроме того, в указанной формуле аналогового сигнала Δk2 допущена ошибка, поскольку формула должна содержать не задаваемое значение регулируемого давления в переливном клапане рω2, а текущую величину ошибки его регулирования (рω2 - p1).
Для предотвращения бокового заноса задней оси в случае избыточной и заноса передней в случае недостаточной поворачиваемости автомобиля с регулируемым МКДМ на закругленных участках автодорог при пониженном сцеплении необходимо соблюдать соответствие заданной скорости движения кривизне заданной траектории движения. Нарушение этого соответствия вызывает скольжение либо наружного при недостаточной, либо внутреннего ведущего колеса при избыточной поворачиваемости автомобиля. В рассматриваемом патенте [4] в качестве признака этого нарушения принято неравенство нулю производной  где р0 - относительная кривизна траектории движения и ξ - относительная разность частоты вращения ведущих колес. Утверждение, что при допустимых значениях разности крутящих моментов ведущих колес связь ξ и р0 практически пропорциональна и ε≈0, весьма спорное. Такая связь имеет место при равенстве крутящих моментов колес в случае разблокир0ванного МКДМ и ее можно допустить лишь при ограниченной величине неравенства этих крутящих моментов. Поэтому использование аналогового параметра ε при формировании дискретного сигнала превышения скорости движения можно использовать только при разблокированном МКДМ и непригодно для регулируемого режима МКДМ.
где р0 - относительная кривизна траектории движения и ξ - относительная разность частоты вращения ведущих колес. Утверждение, что при допустимых значениях разности крутящих моментов ведущих колес связь ξ и р0 практически пропорциональна и ε≈0, весьма спорное. Такая связь имеет место при равенстве крутящих моментов колес в случае разблокир0ванного МКДМ и ее можно допустить лишь при ограниченной величине неравенства этих крутящих моментов. Поэтому использование аналогового параметра ε при формировании дискретного сигнала превышения скорости движения можно использовать только при разблокированном МКДМ и непригодно для регулируемого режима МКДМ.
А предложенное с указанной выше целью определение дискретных параметров Sψ1, Sψ2, фиксирующих превышение заданной предельной величины углов бокового увода передней и задней оси колес, не имеет практического смысла. Это связано с тем, что предельная величина угла бокового увода ведущего колеса при нелинейной зависимости от боковой нагрузки зависит не только от состояния дорожного покрытия, но и от тяговой нагрузки колеса, влияющей на запас сцепления колеса в поперечном направлении. Поэтому чем выше скорость движения, тем меньше этот запас и коэффициент сопротивления боковому уводу шины, который снижается по мере увеличения боковой нагрузки, и тем меньше предельная величина угла бокового увода.
Также в случае невысокой скорости непрямолинейного движения автомобиля с разблокированным МКДМ, например, 60 км/час при неблагоприятных дорожных условиях и погодных условиях из-за пониженного сцепления ведущих колес возникает опасность бокового за заноса ведущей оси колес. В этом случае водителю необходима информация о текущей величине показателя поворачиваемости kп для своевременного включения САУ либо при чрезмерном снижении kп, либо чрезмерном увеличении его. Однако в предложенной САУ МКДМ этого не предусмотрено.
Таким образом, основными недостатками регулируемого межколесного дифференциального механизма с САУ, предложенного в патенте [4], являются:
- При расположении ведомой шестерни главной передачи на одной оси с планетарными механизмами чрезмерно увеличен поперечный габаритный размер МКДМ, что не позволяет его использовать при независимой подвеске ведущих колес.
- Из-за чрезмерно малой разности Δβ определяемых курсовых углов центральных точек ведущих осей, снижающейся при больших радиусах R0 закругленных участков автотрасс, например, при 1200 м до 0.137°, для обеспечения приемлемой относительной погрешности ее определения посредством двух двухкомпонентных акселерометров с осями чувствительности, направленными под углом 45° относительно продольной и поперечной оси автомобиля, относительная погрешность последних не должна превышать 0.003%. Из-за невозможности обеспечить такую точность использование указанных акселерометров для определения Δр и предложенные формулы для определения текущих значений показателя статической поворачиваемости автомобиля (4к2)  и относительной кривизны траектории кругового движения
и относительной кривизны траектории кругового движения  непригодны для практического применения в САУ МКДМ.
непригодны для практического применения в САУ МКДМ.
- Для непрямолинейного движения даже при малой величине центростремительного ускорения режим работы САУ МКДМ в качестве "следящей системы", в котором задействован переливной клапан, изменяющий давление на выходе гидромашины и разность крутящих моментов внутреннего и наружного ведущих колес пропорционально квадрату текущей величины разности их частоты вращения подобно самоблокирующемуся "по скорости" МКД нецелесообразен, как для переднеприводных автомобилей из-за присущей им недостаточной поворачиваемости, так и заднеприводных при неполной загрузке их салона и разгруженном багажнике, когда такой автомобиль приобретает недостаточную поворачиваемость.
- При формировании в вычислительном блоке САУ управляющих аналоговых сигналов Δk1 для дроссельного регулятора расхода и Δk2 для переливного клапана не учитывается начальный режим работы гидромашины при практическом отсутствии перепада давления между ее рабочими полостями при холостом вращении.
- Предложенный аналоговый параметр  непригоден для формировании дискретного сигнала о превышении скорости непрямолинейного движения в случае неблагоприятных дорожных условий.
непригоден для формировании дискретного сигнала о превышении скорости непрямолинейного движения в случае неблагоприятных дорожных условий.
Решение поставленных задач достигается приводом коронных шестерен, являющихся ведущими звеньями планетарных механизмов, закрепленных на центрально расположенном трубчатом вале, посредством шестеренной цилиндрической пары от ведомого вала главной передачи - конической при заднем приводе и цилиндрической при переднем, и кинематической связью солнечных шестерни посредством двух цилиндрических шестеренных пар, ведущие шестерни которых закреплены на наружных концах двух соосных валов, и установленных на внутренних концах этих валов двух ведомых конических шестерен с общей ведущей конической шестерней, которая связана с валом указанной выше гидромашины; соединением входной и выходной рабочих полостей гидромашины с выходами трехпозиционного с "закрытым центром" золотника управления реверсом гидромашины и посредством двух выпускных обратных клапанов - с входом трехпозиционного с "открытым центром" золотника управления режимами работы гидромашины, в нейтральном положении которых выходная полость гидромашины через соответствующий выпускной обратный клапан, а ее входная полость полость через соответствующий впускной обратный клапан вне зависимости от направления ее холостого вращения соединена со сливной магистралью, обеспечивая режим разблокировки МКДМ, а во включенных положениях указанный золотник соединяет выходную полость гидромашины либо с входом электроуправляемого переливного клапана, обеспечивая работу гидромашины в режиме гидронасоса при фиксированной настройке давления на входе клапана для блокировки МКДМ в случае углового отклонения δθ управляемых колес, меньшего ±0.06°, и прямолинейного движения или при их большем угловом отклонении и повороте автомобиля - регулируемом САУ давлении на входе клапана и соответствующей отрицательной разности крутящих моментов наружного и внутреннего ведущих колес, либо через выпускной обратный клапан со сливной магистралью, а ее входную рабочую полость - с выходом электроуправляемого редукционного клапана в нагнетательной магистрали гидроаккумулятора при рабочем положении золотника с "закрытым центром", соответствующем направлению поворота автомобиля, обеспечивая работу гидромашины в режиме гидромотора при регулируемом САУ давлении на выходе редукционного клапана и соответствующей либо положительной, либо отрицательной указанной разности крутящих моментов в зависимости от характера поворачиваемости автомобиля; функционированием САУ в качестве автоматического регулятора, поддерживающего заданную величину указанного выше безразмерного регулируемого параметра kп0=0.9, текущие значения которого определяются в вычислительном блоке, как отношение произведения длины колесной базы автомобиля и квадрата угловой скорости его поворота к произведению расчетных значений поперечного ускорения и абсолютной величины угла поворота передних управляемых колес, определяемой углом поворота "условного" переднего колеса относительно центральной точки передней оси при небольшой области нечувствительности  с сохранением прямолинейного движения и равенстве отрицания дискретного параметра (-Sθ)=1, и при угле поворота,
с сохранением прямолинейного движения и равенстве отрицания дискретного параметра (-Sθ)=1, и при угле поворота,  равной фактической его величине на основе измерений углов поворота передних колес и равенстве дискретного параметра Sθ=1, определением в вычислительном блоке аналоговых величин ошибки δр фиксированной настройки давления рmax на входе переливного клапана при блокировке МКДМ и разности
равной фактической его величине на основе измерений углов поворота передних колес и равенстве дискретного параметра Sθ=1, определением в вычислительном блоке аналоговых величин ошибки δр фиксированной настройки давления рmax на входе переливного клапана при блокировке МКДМ и разности  заданной и текущей величины регулируемого параметра при разблокированном МКДМ, являющейся начальным значением ошибки регулирования Δk, знак которой отрицательный либо положительный фиксируется в двух однополярных релейных звеньях с областью нечувствительности, например, δk0=±0.05, дискретными параметрами SΔk1 и SΔk2 и равенство одного из них единице или
заданной и текущей величины регулируемого параметра при разблокированном МКДМ, являющейся начальным значением ошибки регулирования Δk, знак которой отрицательный либо положительный фиксируется в двух однополярных релейных звеньях с областью нечувствительности, например, δk0=±0.05, дискретными параметрами SΔk1 и SΔk2 и равенство одного из них единице или  определяет режим работы гидромашины либо гидронасоса при SΔk1=1, либо гидромотора при SΔk2=1 и начало функционирования МКДМ в регулируемом режиме при исполнении САУ функции автоматического регулятора, признаком которого в обоих случаях является наличие перепада давления на выходе и входе гидромашины, превышающего величину потерь давления Δр0 на механическое трение и циркуляцию рабочей жидкости при холостом вращении гидромашины, фиксируемого равенством дискретного параметра Sp=1, вне зависимости от режима работы гидромашины, от знака начальной Δk0 и текущей Δk величины ошибки регулирования и величины дискретных параметров SΔk1 и SΔk2; формированием в электронном блоке САУ аналоговых сигналов управления переливным клапаном, обеспечивающих работу гидромашины в режиме гидронасоса либо в случае прямолинейного движения и фиксированной настройки давления на входе переливного клапана в режиме блокировки МКДМ - ur1, пропорционального δр при равенстве (-Sθ)=1, либо в случае поворота автомобиля при избыточной относительно заданного уровня поворачиваемости и регулируемого САУ давлении на его входе при регулируемом режиме МКДМ - ur1, пропорционального Δk при (-Sω)=1 и SΔk1=1 или при (-Sω)=1 и Sp=1, а также сигналов управления обеспечивающих работу гидромашины в режиме гидромотора при регулируемом САУ давлении на выходе редукционного клапана - uг2, пропорционального Δk при (-Sω)=1 и SΔk2=1 или при (-Sω)=1 и Sp=1 в случае недостаточной поворачиваемости, а при Sω=1 и SΔk1=1 или при Sω=1 и Sp=1 в случае чрезмерной избыточной поворачиваемости, причем в формулы указанных аналоговых сигналов управления, используемых в случаях избыточной поворачиваемости включен корректирующий множитель (-1) для устранения несоответствия отрицательного знака ошибки регулирования Δk и положительного знака соответствующих изменений регулируемого давления на входе либо переливного, либо на выходе редукционного клапана; переключением указанных выше режимов работы МКДМ двумя ручными кнопками панели управления, цифровые сигналы включения которых u01 и u02 при независимой от характера движения автомобиля разблокировке МКДМ равны нулю, а при включении любой из них - u01=1 или u02=1 и в случае отсутствия движения автомобиля задним ходом и торможения цифровая команды u0 на входе постоянно разомкнутого реле, управляющего включением электропитания соленоидов гидравлической системы, равна единице, что позволяет задействовать сформированные в электронном блоке цифровые команды управления указанными выше золотниками посредством включения соответствующих постоянно-разомкнутых реле, в случае прямолинейного движении для включения режима блокировки МКДМ при u01=1 - цифровую команду u4=1 переключения золотника с "открытым центром" для перевода работы гидромашины в режим гидронасоса, а в случае поворота автомобиля для включения регулируемого режима МКДМ при u02=1 - либо цифровую команду u4=1 при избыточной поворачиваемости и условиях Sω=0, SΔk1=1, либо цифровую команду u3=1 для перевода работы гидромашины в режим гидромотора при недостаточной поворачиваемости и условиях Sω=0, SΔk2=1 или при чрезмерной избыточной поворачиваемости и условиях Sω=1, SΔk1=1, дополняемую цифровыми командами переключения трехпозиционного золотника с "закрытым центром", определяющими направление вращения гидромашины, цифровой командой - u1 при условиях Sω=0, Skθ=1 или Sω=1, Skθ=0, где дискретный параметр Skθ фиксирует направление поворота управляемых колес, например, при повороте вправо Skθ=1, или цифровой командой - u2 при условиях либо Sω=0, Skθ=0, либо Sω=1, Skθ=1; включением световых сигнальных индикаторов панели управления зеленого цвета, информирующих о функционировании МКДМ в каждом из указанных выше рабочих режимах, цифровые команды которго соответствуют следующим условиям: в режиме разблокировки МКДМ отрицанию цифровой команды включения электропитания u0=0, в режиме блокировки МКДМ при угловых отклонениях управляемых колес, меньших ±0.06°, и фиксированной настройке давления переливного клапана при условии минимизации ошибки регулирования δр, в регулируемом режиме при условии снижения ошибки регулирования Δk ниже заданного уровня, например, ±0.05 и наличия разности давления во входной и выходной рабочих полостях гидромашины вне зависимости от режима ее работы; включением световых сигнальных индикаторов панели управления красного цвета, при неблагоприятных дорожных и погодных условиях непрямолинейного движения автомобиля информирующих: о необходимости включения регулируемого режима МКДМ, если он разблокирован, при условии изменения разности Δk0 заданной и фактической величины показателя статической поворачиваемости за пределы диапазона
определяет режим работы гидромашины либо гидронасоса при SΔk1=1, либо гидромотора при SΔk2=1 и начало функционирования МКДМ в регулируемом режиме при исполнении САУ функции автоматического регулятора, признаком которого в обоих случаях является наличие перепада давления на выходе и входе гидромашины, превышающего величину потерь давления Δр0 на механическое трение и циркуляцию рабочей жидкости при холостом вращении гидромашины, фиксируемого равенством дискретного параметра Sp=1, вне зависимости от режима работы гидромашины, от знака начальной Δk0 и текущей Δk величины ошибки регулирования и величины дискретных параметров SΔk1 и SΔk2; формированием в электронном блоке САУ аналоговых сигналов управления переливным клапаном, обеспечивающих работу гидромашины в режиме гидронасоса либо в случае прямолинейного движения и фиксированной настройки давления на входе переливного клапана в режиме блокировки МКДМ - ur1, пропорционального δр при равенстве (-Sθ)=1, либо в случае поворота автомобиля при избыточной относительно заданного уровня поворачиваемости и регулируемого САУ давлении на его входе при регулируемом режиме МКДМ - ur1, пропорционального Δk при (-Sω)=1 и SΔk1=1 или при (-Sω)=1 и Sp=1, а также сигналов управления обеспечивающих работу гидромашины в режиме гидромотора при регулируемом САУ давлении на выходе редукционного клапана - uг2, пропорционального Δk при (-Sω)=1 и SΔk2=1 или при (-Sω)=1 и Sp=1 в случае недостаточной поворачиваемости, а при Sω=1 и SΔk1=1 или при Sω=1 и Sp=1 в случае чрезмерной избыточной поворачиваемости, причем в формулы указанных аналоговых сигналов управления, используемых в случаях избыточной поворачиваемости включен корректирующий множитель (-1) для устранения несоответствия отрицательного знака ошибки регулирования Δk и положительного знака соответствующих изменений регулируемого давления на входе либо переливного, либо на выходе редукционного клапана; переключением указанных выше режимов работы МКДМ двумя ручными кнопками панели управления, цифровые сигналы включения которых u01 и u02 при независимой от характера движения автомобиля разблокировке МКДМ равны нулю, а при включении любой из них - u01=1 или u02=1 и в случае отсутствия движения автомобиля задним ходом и торможения цифровая команды u0 на входе постоянно разомкнутого реле, управляющего включением электропитания соленоидов гидравлической системы, равна единице, что позволяет задействовать сформированные в электронном блоке цифровые команды управления указанными выше золотниками посредством включения соответствующих постоянно-разомкнутых реле, в случае прямолинейного движении для включения режима блокировки МКДМ при u01=1 - цифровую команду u4=1 переключения золотника с "открытым центром" для перевода работы гидромашины в режим гидронасоса, а в случае поворота автомобиля для включения регулируемого режима МКДМ при u02=1 - либо цифровую команду u4=1 при избыточной поворачиваемости и условиях Sω=0, SΔk1=1, либо цифровую команду u3=1 для перевода работы гидромашины в режим гидромотора при недостаточной поворачиваемости и условиях Sω=0, SΔk2=1 или при чрезмерной избыточной поворачиваемости и условиях Sω=1, SΔk1=1, дополняемую цифровыми командами переключения трехпозиционного золотника с "закрытым центром", определяющими направление вращения гидромашины, цифровой командой - u1 при условиях Sω=0, Skθ=1 или Sω=1, Skθ=0, где дискретный параметр Skθ фиксирует направление поворота управляемых колес, например, при повороте вправо Skθ=1, или цифровой командой - u2 при условиях либо Sω=0, Skθ=0, либо Sω=1, Skθ=1; включением световых сигнальных индикаторов панели управления зеленого цвета, информирующих о функционировании МКДМ в каждом из указанных выше рабочих режимах, цифровые команды которго соответствуют следующим условиям: в режиме разблокировки МКДМ отрицанию цифровой команды включения электропитания u0=0, в режиме блокировки МКДМ при угловых отклонениях управляемых колес, меньших ±0.06°, и фиксированной настройке давления переливного клапана при условии минимизации ошибки регулирования δр, в регулируемом режиме при условии снижения ошибки регулирования Δk ниже заданного уровня, например, ±0.05 и наличия разности давления во входной и выходной рабочих полостях гидромашины вне зависимости от режима ее работы; включением световых сигнальных индикаторов панели управления красного цвета, при неблагоприятных дорожных и погодных условиях непрямолинейного движения автомобиля информирующих: о необходимости включения регулируемого режима МКДМ, если он разблокирован, при условии изменения разности Δk0 заданной и фактической величины показателя статической поворачиваемости за пределы диапазона  граничные значения которого
граничные значения которого  соответствуют допустимой при пониженной скорости движения автомобиля величине показателя kп, а при регулируемом режиме МКДМ - о превышении предельной для сцепления ведущих колес скорости непрямолинейного движения автомобиля и о необходимости ее снижения в случае увеличения положительной величины производной по времени от соотношения относительной величины разницы фактической и без учета скоростных потерь разности частоты вращения ведущих колес по отношению к средней частоте их вращения и разности давления в нагнетательной и в сливной магистралях гидромашины.
соответствуют допустимой при пониженной скорости движения автомобиля величине показателя kп, а при регулируемом режиме МКДМ - о превышении предельной для сцепления ведущих колес скорости непрямолинейного движения автомобиля и о необходимости ее снижения в случае увеличения положительной величины производной по времени от соотношения относительной величины разницы фактической и без учета скоростных потерь разности частоты вращения ведущих колес по отношению к средней частоте их вращения и разности давления в нагнетательной и в сливной магистралях гидромашины.
На фиг. 1 представлены принципиальные кинематические схемы регулируемого межколесного дифференциального механизма (МКДМ) ведущих мостов легкового автомобиля (4к2) при заднем приводе и при переднем приводе с поперечным расположением двигателя и коробки перемены передач; на фиг. 2, 3 и 4 - представлена конструкция МКДМ для заднего ведущего моста: на фиг. 2 - вид слева, на фиг. 3 - вертикальный, наклонный и горизонтальный разрезы, на фиг. 4 - вид спереди; на фиг. 5 - схема гидравлической системы управления режимами работы МКДМ; на фиг. 6 - блок-схема САУ режимами работы МКДМ; на фиг. 7 - кинематическая схема кругового движения автомобиля с различным уровнем поворачиваемости при больших радиусах траектории движения; на фиг. 8 - функциональная схема вычислительного блока; на фиг. 9 - функциональная схема электронного блока САУ МКДМ; на фиг. 10 - принципиальная схема панели управления и световой индикации.
Регулируемый межколесный дифференциальный механизм для заднего - 1 и для переднего - 2 (фиг. 1) ведущего моста содержит два расположенных симметрично относительно центральной точки ведущей оси колес однорядных планетарных механизмов - 3 и 4, ведомыми звеньями которых являются водила - 5, соединенные с полуосями - 6 ведущих колес, а ведущими - закрепленные на трубчатом вале - 7 коронные шестерни - 8 и 9, последняя из которых посредством цилиндрической пары -10 и 11 с наружным зацеплением кинематически связана с ведомым валом - 12 главной передачи. В случае заднего привода шестерня - 11 соединена с зубчатым венцом ведомой конической шестерни - 13 главной передачи, ведущая коническая шестерня - 14 которой, выполненная заодно с ведущим валом, связана карданным валом - 15 с вторичным валом коробки перемены передач. А в случае переднего привода на ведомом валу - 12 закреплена ведомая цилиндрическая шестерня - 16, привод которой обеспечивается ведущей шестерней - 17, установленной на вторичном валу - 18 коробки перемены передач, корпус которой жестко связан с корпусом МКДМ.
Дифференциальная межколесная связь и регулирование разности крутящих моментов ведущих колес при изменении разности частоты вращения солнечных шестерен - 19 и при заднем, и при переднем приводе обеспечивается двумя парами цилиндрических шестерен, ведомыми - 20, выполненных заодно с солнечными шестернями - 19, и ведущими - 21, установленных на наружных концах двух соосно расположенных валов - 22, а на внутренних хвостовиках которых закреплены ведомые конические шестерни - 23, которые взаимодействуют с центрально расположенной общей ведущей конической шестерней - 24, связанной с валом обратимой, реверсируемой среднеоборотной объемной гидромашины - 25, например, героторного или героллероного типа. При свободной циркуляции рабочей жидкости между рабочими полостями гидромашины и ее холостом вращении обеспечивается свободное разнонаправленное вращение конических шестерен - 23, солнечных шестерен - 19 и режим разблокированного МКДМ. При автоматически регулируемом перепаде давления между указанными полостями гидромашины ее вращение - принудительное, либо в режиме гидромотора, либо в режиме гидронасоса. При увеличении перепада давления в первом случае частота вращения гидромашины увеличивается при ускорении наружного и замедлении внутреннего ведущих колес, а во втором случае - уменьшается при ускорении внутреннего и замедлении наружного ведущего колеса. При снижении перепада давления указанные изменения частоты вращения гидромашины происходят в обратном направлении. Благодаря межколесной дифференциальной связи указанные изменения частоты вращения наружного и внутреннего ведущих колес симметричны.
Как следует из фиг. 2, корпус МКДМ для заднего ведущего моста состоит из двух частей, в верхней - 26 размещены упомянутые выше конические шестерни - 23 на валах - 22, внутренние подшипниковые опоры - 27 которых - разъемные, и общая ведущая коническая шестерня - 24, выполненная заодно с валом - 28, который с помощью зубчатой муфты - 29 соединен с валом - 30 прифланцованной гидромашины - 25. В нижней части - 31 корпуса размещены указанные выше (фиг. 1) планетарные механизмы - 3 и 4, ведомый вал - 12 главной передачи с ведомой шестерней - 11 и ведомой шестерней - 13 главной передачи, а также ведущая шестерня с ведущим валом - 14 главной передачи.
Разрез ABCD по трем плоскостям: АВ - вертикальной, ВС - наклонной и CD - горизонтальной, развернутый на одной плоскости, представлен на фиг. 3. Коронные шестерни - 8 и 9 планетарных механизмов содержат зубчатые венцы - 32 с внутренним эвольвентным зубчатым профилем, которые передают крутящий момент от зубчатых с наружным зацеплением полумуфт - 33 и 34 сателлитам - 35 планетарных механизмов. Правая зубчатая полумуфта - 33 установлена на шлицах трубчатого вала - 7, а левая - 34 закреплена на ступице указанной выше (фиг. 1) шестерне - 10, которая также установлена на шлицах трубчатого вала для передачи крутящего момента от ведомого вала - 12 главной передачи. Трубчатый вал - 7 установлен между планетарными механизмами на двух радиальных подшипниках - 36 в разъемной опоре - 37, в расточке которой между наружных колец подшипников установлена распорная втулка - 38. В торцевых расточках трубчатого вала, левой и правой, размещены радиальные подшипники -39 внутренних опор водил - 5, выполненных заодно с ведомыми валами - 40. Наружные концы валов - 40 установлены на радиальных подшипниках - 41 в нижней части корпуса. На каждом из этих валов посредством пары радиальных подшипников - 42 установлены выполненные в одном блоке с солнечными шестернями - 19 ведомые шестерни - 20 межколесной дифференциальной связи. А наружные шлицевые хвостовики валов - 40 посредством втулочных муфт - 43 и карданных сочленений связны с полуосями - 6 ведущих колес (фиг. 1).
Чтобы обеспечить минимальное горизонтальное боковое смещение оси ведущей конической шестерни - 14 от центральной точки оси задних колес ведомая коническая шестерня - 13 главной передачи размещена и закреплена на ступице ведомой цилиндрической шестерни -11. С учетом масштаба М=0.4 изображенных на фиг. 2…4 элементов конструкции МКДМ, указанное боковое смещение незначительно и составляет 21 мм. Кроме того, при такой установке шестерни - 13 ведомый вал - 12 главной передачи разгружен от передачи крутящего момента и касательные напряжения в этом вале обнулены.
Предлагаемая конструкция МКДМ, представленная на фиг. 2, 3 и 4, ориентирована на задний ведущий мост с шириной колеи В=1.46 м, колесами 175/80-R16 со статическим радиусом rс=0.33 м. Передаточное отношение от ведущей шестерни - 13 главной передачи к ведущим колесам определяется произведением трех составляющих передаточных отношений: главной пары конических шестерен 13 и 14 - i1=2, понижающей пары цилиндрических шестерен 11 и 10 - i2=1.48, а также передаточного отношения планетарных механизмов (при остановленных солнечных шестернях - 19) - i3=1.5 и составляет 4.44. Оно может быть уменьшено, например до 4.0 за счет снижения ii до 1.8.
При относительно малой для главной передачи величине внешнего делительного диаметра конической ведомой шестерни - 13 при i1=2…1.8, использование гипоидного зацепления конических шестерен не обеспечивает достаточного вертикального смещения вниз оси ведущего вала главной передачи и карданного вала заднего привода. Поэтому в предлагаемом МКДМ этот вопрос решен за счет смещения вниз ведомого вала - 12 относительно оси ведущих колес (без уменьшения дорожного просвета) на величину h0 (фиг. 2), равную разности наружных радиусов наиболее габаритных на оси "В" ведомых шестерен - 20 привода солнечных шестерен и ведомой цилиндрической шестерни - 11 главной передачи (фиг. 2), причем использование гипоидного зацепления конических шестерен необязательно. В предлагаемой конструкции применительно к указанным выше ширине колеи и размерам колес h0=50 мм, расстояние между осью ведущих колес и нижней наружной поверхностью корпуса МКДМ составляет 130 мм, а дорожный просвет под задним ведущем мостом - 200 мм.
Передаточное отношение iг от гидромашины к ведущему колесу определяется произведением трех составляющих передаточных отношений: понижающей пары конических шестерен 24 и 23 - iг1=2 (фиг. 2), понижающей пары цилиндрических шестерен 21 и 20 - iг2=3, а также передаточного отношения планетарных механизмов (при остановленных коронных шестернях - 8 и 9) iг3=3.5 и составляет iг=21. Оно в два раза выше, чем у указанного выше ближайшего аналога [5]. При iг=21 и указанной выше минимально устойчивой частоте вращения гидромашины в режиме гидромотора 1.05 рад/с и ширине колеи колес соответствующая минимальная разность частоты вращения ведущих колес составляет Δωmin=0.05 рад/с. Это обеспечивает возможность устойчивой работы гидромашины при движении автомобиля, например, со скоростью 120 км/час при радиусах закруглений автотрассы до 2950 м.
Габаритная ширина МКДМ при независимой задней подвеске и "разрезной" схеме заднего моста составляет 36% от ширины колеи (фиг. 4). Например, при В=1.46 м она составляет 0.522 м и позволяет использовать предлагаемую конструкцию МКДМ и при зависимой, и при независимой подвеске задних ведущих колес.
Гидромашина - 25 подключена к гидравлической системе, схема которой представлена на фиг. 5. При регулируемом режиме МКДМ гидромашина работает, либо в режиме гидромотора, либо режиме гидронасоса, обеспечивая автоматическое изменение разности крутящих моментов наружного и внутреннего ведущих колес. В первом случае источником питания является гидропневматический аккумулятор - 44, зарядка которого осуществляется шестеренным гидронасосом - 45, приводимым от носка коленчатого вала двигателя автомобиля. Посредством автомата зарядки - 46 в нагнетательной магистрали - 47 гидроаккумулятора поддерживается заданное давление ра, например 15….17 МПа. Из этой магистрали рабочая жидкость через редукционный клапан - 48 с пропорциональным электроуправлением поступает на вход трехпозиционного электроуправляемого соленоидами С1 и С2 золотника - 49 с закрытом центром, второй вход которого связан со сливной магистралью - 50, а выходы посредством магистралей - 51 и 52 соединены с рабочими входной и выходной полостями гидромашины. При нейтральном положении золотника - 49 эти выходы перекрыты. Указанные магистрали, кроме того, соединены выпускными обратными клапанами - 53 с магистралью - 54, которая посредством трехпозиционного электроуправляемого соленоидами С3 и С4 золотника - 55 с открытым центром в нейтральном положении связана со сливной магистралью - 50 и входом переливного клапана - 56 с пропорциональным электроуправлением. В этом случае выходная полость гидромашины посредством либо магистрали - 51, либо магистрали - 52 через соответствующий выпускной обратный клапан - 53 соединена с магистралью - 54 и сливной магистралью - 50, что обеспечивает возможность холостого вращения гидромашины в режиме гидронасоса и разблокировки МКДМ. Чтобы избежать разряжения во входной полости гидромашины вне зависимости от направления ее вращения, обе ее рабочие полости связаны парой впускных обратных клапанов - 57 со сливной магистралью - 50, в которой посредством напорного клапана - 58 поддерживается небольшое избыточное давление, например, 0.2…0.3 МПа.
При включенном соленоиде С3 и (левом на схеме) рабочем положении золотника - 55 вход магистрали - 54 перекрыт, магистрали-51 и 52 разъединены обратными клапанами - 53, а вход переливного клапана - 56 соединен со сливной магистралью - 50. С небольшим отставанием от включения соленоида С3 осуществляется переключение золотника - 49 в рабочее положение, соответствующее заданному направлению вращения, либо соленоидом С1, либо С2 и рабочая жидкость из редукционного клапана - 48 поступает во входную полость гидромашины, а из выходной - в сливную магистраль - 50. Посредством автоматически регулируемого увеличения давления на выходе редукционного клапана, крутящего момента на валу - 24 (фиг. 1) гидромашины и увеличения разности касательных сил тяги наружного и внутреннего ведущих колес обеспечивается снижение недостаточной поворачиваемости автомобиля.
При включенном соленоиде С4 и (правом на схеме) рабочем положении золотника - 55 вход сливной магистрали - 50 перекрыт, магистрали - 51 и 52 обратными клапанами - 53 и магистралью - 54 соединены со входом переливного клапана - 56. При этом включение соленоида С4 осуществляется одновременно с переводом золотника - 49 в нейтральное положение посредством выключения либо соленоида С1, либо С2, в котором его выходы в магистрали - 51 и 52 перекрыты. В этом случае вращение гидромашины в режиме гидронасоса блокируется до тех пор, пока за счет увеличения разности крутящих моментов внутреннего и наружного ведущих колес давление рабочей жидкости в ее выходной полости не превысит величину регулируемого переливным клапаном - 56 давления и не начнется перепуск рабочей жидкости в сливную магистраль - 50. За счет автоматически регулируемого увеличения давления перепуска, соответствующего крутящего момента на валу - 24 (фиг. 1) гидромашины и разности касательных сил тяги внутреннего и наружного ведущих колес обеспечивается снижение избыточной поворачиваемости автомобиля.
Изменение регулируемого давления, как при снижении недостаточной, так и избыточной поворачиваемости примерно пропорционально изменению разности крутящих моментов соответствующих ведущих колес и стабилизирующей разности их касательных сил тяги. В первом случае эта стабилизация обеспечивается увеличением поворачивающего момента в плоскости качения автомобиля, а во втором - увеличением момента сопротивления его повороту.
Максимальная для заданного водителем радиуса круговой траектории движения величина регулируемого переливным клапаном давления и соответствующего момента сопротивления повороту достигается при выравнивании частоты вращения наружного и внутреннего ведущих колес и полной блокировке МКДМ. При малой кривизне траектории скоростного движения, например, на автотрассах 1-ой категории момент сопротивления повороту может оказаться недостаточным для устранения чрезмерной избыточной поворачиваемости автомобиля. В таком случае для его увеличения необходимы дополнительное увеличение крутящего момента на валу гидромашины, которое можно получить при положительной разности частоты вращения внутреннего и наружного ведущих колес. Для этого гидромашина автоматически переводится из режима гидронасоса в режим гидромотора посредством переключением золотника - 55 соленоидом - С3, а включением золотника - 49 в рабочее положение одним из двух соленоидов С1 или С2 изменяется направление вращения гидромашины. При этом оно происходят только после включения золотника - 55 соленоидом С3 при полной блокировке гидромашины. Это исключает, пусть и кратковременную, но ненужную разрядку гидроаккумулятора - 24 при опережающем выходе золотника - 49 из нейтрального положения.. После переключения золотника - 49 гидромашина начинает работать в режиме гидромотора, обеспечивая за счет регулируемого редукционным клапаном - 48 давления в ее входной полости необходимое увеличение положительной разности касательных сил тяги внутреннего и наружного ведущих колес.
Повышение курсовой устойчивости автомобиля при прямолинейном движении обеспечивается режимом блокировки МКДМ посредством включения соленоида С4 золотника - 55 и работой гидромашины в режиме гидронасоса при фиксированной настройке переливного клапана - 56 на предельную величину давления, при которой он выполняет функцию предохранительного клапана.
Для непрерывного измерения перепада давления гидромашины к магистрали - 54, соединеняемой либо с выходной полостью гидромашины в режиме гидронасоса, либо к входной полости гидромашины в режиме гидромотора и к сливной магистрали - 50 подключены датчики давления - 59 и 60. А для контроля и информации на панели управления о снижении ниже заданного уровня давления в сливной магистрали - 50 и давления в нагнетательной магистрали - 47 гидроаккумулятора подключены реле давления - 61 и 62.
Таким образом предлагаемая гидравлическая система позволяет реализовать при прямолинейном движении автомобиля режимы разблокировки и блокировки МКДМ и при непрямолинейном движении режим разблокировки и регулируемый режим МКДМ, а также возможное сочетание этих режимов и исключения разблокировки МКДМ..
Блок-схема САУ режимами работы МКДМ представлена на фиг. 6. Блок - 63 включает датчики частоты вращения Ωл, Ωп, левого и правого ведущих колес, угла поворота левого Θл и правого Θп управляемых передних колес, одноосевой гироскоп для измерения в горизонтальной плоскости угловой скорости Ω0 поворота автомобиля в рабочем диапазоне 0.32 °/с…60°/с, однокомпонентный акселерометр для измерения поперечной составляющей центростремительного ускорения J0y в центре масс, точке С продольной оси координат X (фиг. 7), в рабочем диапазоне 0.019g…0.45g, датчики давления - 59 и 60 (фиг. 5) в магистрали - 54, связанной с рабочей полостью гидромашины высокого давления, p1 и в сливной магистрали - 50, связанной с рабочей полостью низкого давления, р0, а также дискретные датчики включения заднего хода Z1 и торможения Z2. Величина нижних граничных значений диапазонов измерения угловой скорости и поперечной составляющей центростремительного ускорения заданы для движения автомобиля с максимальной разрешенной скоростью 120 км/час на автотрассах 1 и 2 категории при повороте прямолинейного участка трассы на 4° с радиусом закругления 6000 м (в соответствии с ГОСТ 33475-2015), Соответствующие граничные значения 0.32°/с и 0.019g не превышают возможности современных измерительных средств. Например, разрешающая способность "jaw rate sensor" фирмы Bosch, применяющегося в системах "ESP" и "VCA", составляет при измерении угловой скорости поворота и поперечного ускорения 0.1°/с с и 0.01g. Величина верхних граничных значений указанных диапазонов соответствуют режиму разворота автомобиля на 180° при предельной по сцеплению на сухом асфальте величине центростремительного ускорения 0.5g и радиусе разворота не более 4.2 м.
Выходные аналоговые сигналы указанных датчиков: ωл и ωп - частоты вращения ведущих колес, θл и θп - углов поворота передних колес, ω0 - угловой скорости поворота автомобиля (°/с), j0y - поперечного ускорения, р0 и p1 - давления рабочей жидкости в рабочих полостях гидромашины, а также дискретные сигналы z1 - включения заднего хода и z2 - торможения из блока - 63 передаются в вычислительный блок - 64. На основе этих измерений в этом блоке определяются кинематические параметры непрямолинейного движения автомобиля и, в т.ч. текущая величина регулируемого параметра - показателя статической поворачиваемости kп, являющаяся аналоговым сигналом обратной связи САУ, работающей в режиме автоматического регулятора, поддерживающего при повороте автомобиля заданное значение регулируемого параметра kп0. Ошибка регулирования Δk= kп0 - kп преобразуется в электронном блоке САУ МКДМ - 65 в аналоговые сигналы управления, либо uг1 - переливным клапаном, либо uг2 - редукционным клапаном гидравлической системы САУ, обеспечивающих автоматическое изменение давления p1, либо на входе переливного клапана при работе гидромашины в режиме гидронасоса, либо на выходе редукционнного клапана при работе гидромашины в режиме гидромотора из условия минимизации величины ошибки Δk. И за счет соответствующего изменения крутящего момента на валу гидромашины обеспечивается стабилизирующая разность крутящих моментов ΔМст ведущих колес при непрямолинейном движении. А при прямолинейном движении автомобиля блокировка МКДМ обеспечивается САУ посредством фиксированной настройки переливного клапана на давление p1=рмах при работе гидромашины в режиме гидронасоса. Ошибка регулирования δр=рмах - p1 преобразуется в электронном блоке САУ в аналоговый управляющий сигнал uг1. В вычислительном блоке - 64 определяются также дискретные параметры, передаваемые в электронный блок САУ - 65 для формирования цифровых команд u1…u4 управления соленоидами C1.. С4 золотников гидравлической системы и u0 управления реле РЭО включающего электропитание соленоидов, а также вместе с сигналами реле давления - 61 и 62 (фиг. 5) гидравлической системы для формирования цифровых сигналов u00…u50 для включения на панели управления и световой индикации - 66 световых индикаторов. Водитель информируется о функционировании МКДМ в каждом из включаемых двумя ручными кнопками режимах работы и о его неисправности, а также предупреждается о превышении скорости непрямолинейного движения автомобиля при регулируемом режиме МКДМ и о необходимости включения регулируемого режима при разблокированном МКДМ.
На фиг. 7 представлена плоская ("велосипедная") расчетная кинематическая схема кругового движения автомобиля при постоянном угле поворота управляемых колес (по направлению часовой стрелки), на которой оси колес заменены "условными" (или "эквивалентными") колесами, оси которых совпадают с передней и задней осями колес и пересекают продольную ось X в точках А и В. На этой схеме полюс поворота (проекция мгновенного центра поворота на продольной оси X) расположен за пределами колесной базы. Обычно на подобных схемах он располагается между осями колес. Такое расположение оправдано, либо при радиусах круговой траектории, не превышающих 100…150 м, либо при скорости движения не выше 50…75 км/час. А при скоростном движении (100…150 км/час) соответствующая величина радиусов закругленных участках автотрассы в соответствии с СП 34.13330.2021 составляет не менее 600…1200 м и полюс поворота смещается вперед относительно задней оси колес до 30…40 м. В этом случае вектор абсолютной скорости VA переднего управляемого условного колеса направлен не в сторону поворота, как это имеет место при расположении полюса поворота О0 между осями колес, а в противоположную сторону и угол поворота θ переднего "условного" колеса намного меньше угла ад бокового увода передней оси управляемых колес. Но при этом разность курсовых углов центральных точек задней и передней оси колес  что обеспечивает поворот автомобиля в указанном направлении. Известная из теории автомобиля формула для определения его радиуса поворота:
что обеспечивает поворот автомобиля в указанном направлении. Известная из теории автомобиля формула для определения его радиуса поворота:  где αA и αB - углы бокового увода передней и задней оси колес, L - длина колесной база, при этом не изменяется.
где αA и αB - углы бокового увода передней и задней оси колес, L - длина колесной база, при этом не изменяется.
На схеме представлено круговое движение при трех уровнях поворачиваемости автомобиля: нейтральной, недостаточной и избыточной при одном и том же угле θ поворота переднего условного колеса. Соответствующие буквенные обозначения углов αA и αB бокового увода, курсовых углов ψB и ψA, радиуса поворота R0, мгновенных центров О и полюсов О0 поворота дополнены индексами: "1" для нейтральной поворачиваемости, "2" для недостаточной поворачиваемости, "3" для избыточной поворачиваемости.
Условием нейтральной поворачиваемости является равенство углов бокового увода передней и задней оси αA1=αB1. В этом случае в соответствии с вышеприведенной формулой R01=L/θ. При θ<18° величина R01 практически равна "теоретическому" радиусу поворота R00 при отсутствии бокового увода колес автомобиля. С увеличением угла бокового увода переднего условного колеса αA2>αA1 радиус поворота увеличивается R02>R01, а при увеличении угла бокового увода заднего условного колеса αB3>αB1 радиус поворота уменьшается R03<R01. В первом случае - недостаточная, а во втором - избыточная поворачиваемость. Как было указано выше, безразмерная величина показателя статической поворачиваемости kп пропорциональна показателю W чувствительности автомобиля к управлению и определяется из следующего исходного выражения:  Подставляя значения W=ω0/θ, V=j0y/ω0 получим формулу для определения текущего значения kп в вычислительном блоке - 64 (фиг. 6):
Подставляя значения W=ω0/θ, V=j0y/ω0 получим формулу для определения текущего значения kп в вычислительном блоке - 64 (фиг. 6):  где L/θ=R00. При нейтральной поворачиваемости kп=R00/R01=1, при недостаточной - kп=R00/R02<1, при избыточной - kп=R00/R03>1. При автоматически поддерживаемом значении kп=kп0 в пределах допустимого сцепления ведущих колес величина
где L/θ=R00. При нейтральной поворачиваемости kп=R00/R01=1, при недостаточной - kп=R00/R02<1, при избыточной - kп=R00/R03>1. При автоматически поддерживаемом значении kп=kп0 в пределах допустимого сцепления ведущих колес величина  обратно пропорциональна задаваемому водителем радиусу R01 поворота и не зависит от скорости кругового движения V.
обратно пропорциональна задаваемому водителем радиусу R01 поворота и не зависит от скорости кругового движения V.
При использовании указанной формулы для определения регулируемого параметра kп на основе показаний гироскопа и однокомпонентного акселерометра абсолютная погрешность косвенного измерения kп определяется произведением величины этого параметра и суммы относительных погрешностей акселерометра, удвоенной относительной погрешности гироскопа и относительной погрешности косвенного измерения расчетной величины угла θ поворота управляемых колес. Даже, если относительная погрешность косвенного измерения kп окажется на уровне 5%, автоматически поддерживаемую величину kп0 можно повысить до 0.9, несколько снизив небольшой "запас" недостаточной поворачиваемости, не опасаясь потери курсовой устойчивости движения автомобиля из-за избыточной поворачиваемости при возможном превышения величиной kп единицы в процессе регулирования. Поэтому предлагаемая величина kп0=0.9 дает возможность повысить управляемость без нарушения курсовой устойчивости автомобиля и реализовать режим его оптимальной поворачиваемости. Снижение относительной погрешности косвенного измерения kп позволит САУ нормально функционировать при снижении поперечного ускорения до 0.03g…0.05g (вместо 0.15g у аналога [4]), либо при малых радиусах поворота и скорости движения, либо при высокоскоростном движении и радиусах закруглений автотрассы до 3500 м…2500 м.
Функциональная схема вычислительного блока представлена на фиг. 8. На основе измеряемых значений углов поворота правого и левого управляемых колес в аналоговом звене - 67 определяется текущее значение угла θ поворота переднего "условного" колеса. На расчетной кинематической схеме (фиг. 7) поворот "условного" переднего колеса в направлении часовой стрелки (правый поворот) соответствует положительной величине θ. Отсутствие поворота в указанном выше диапазоне изменения θ=±0.06° и направление поворота фиксируется дискретным знакопеременным параметром Kθ в релейном звене - 68 с областью нечувствительности δθ=±0.06°, равного (+1) при θ> +δθ (правом повороте) и (-1) при θ< -δθ (левом повороте). Область нечувствительности θ=±δθ соответствует прямолинейному движению. Произведение Kθ и θ определяет абсолютную величину  угла поворота вне области нечувствительности. Чтобы избежать нулевой величины при θ=±δθ в знаменателе формулы для определения показателя kп поворачиваемости, используется, не принимающая нулевого значения, "расчетная" абсолютная величина
угла поворота вне области нечувствительности. Чтобы избежать нулевой величины при θ=±δθ в знаменателе формулы для определения показателя kп поворачиваемости, используется, не принимающая нулевого значения, "расчетная" абсолютная величина  определяемая в аналоговом звене - 69. Дискретный параметр Se=1 фиксирует процесс поворота автомобиля в обе стороны от указанного выше "начала поворота управляемого колеса" и определяется в релейном звене - 70. Отрицание (-Sθ)=1 соответствует прямолинейному движению автомобиля в пределах области нечувствительности
определяемая в аналоговом звене - 69. Дискретный параметр Se=1 фиксирует процесс поворота автомобиля в обе стороны от указанного выше "начала поворота управляемого колеса" и определяется в релейном звене - 70. Отрицание (-Sθ)=1 соответствует прямолинейному движению автомобиля в пределах области нечувствительности  Указателем направления поворота автомобиля является дискретный параметр Skθ, определяемый в аналоговом звене - 71, как полусумма единицы и знакопеременного дискретного параметра Kθ1=±1 - результата преобразования величины θ в релейном звене - 72 без учета области нечувствительности. При правом повороте автомобиля Skθ=1, а при левом - Skθ=0. Дискретные параметры Sθ, (-Sθ) и Skθ используются при формировании цифровых команд управления золотниками - 49 и 55, а также цифровых команд включения световых индикаторов на панели управления в электронном блоке САУ - 65 (фиг. 6).
Указателем направления поворота автомобиля является дискретный параметр Skθ, определяемый в аналоговом звене - 71, как полусумма единицы и знакопеременного дискретного параметра Kθ1=±1 - результата преобразования величины θ в релейном звене - 72 без учета области нечувствительности. При правом повороте автомобиля Skθ=1, а при левом - Skθ=0. Дискретные параметры Sθ, (-Sθ) и Skθ используются при формировании цифровых команд управления золотниками - 49 и 55, а также цифровых команд включения световых индикаторов на панели управления в электронном блоке САУ - 65 (фиг. 6).
Показатель статической поворачиваемости  вне зависимости от режима работы МКДМ регулируемого или разблокированного определяется в аналоговом звене - 73. Поскольку параметр kп>0 и не может быть отрицательной величиной при изменении направления поворота и измеряемой поперечной составляющей j0y центростремительного ускорения при определении kп используется абсолютная величина
вне зависимости от режима работы МКДМ регулируемого или разблокированного определяется в аналоговом звене - 73. Поскольку параметр kп>0 и не может быть отрицательной величиной при изменении направления поворота и измеряемой поперечной составляющей j0y центростремительного ускорения при определении kп используется абсолютная величина  Кроме того, чтобы не допустить ее нулевого значения в зоне нечувствительности θ=±δθ, в аналоговое звено - 73 для определения kп поступает "расчетная" величина поперечного ускорения j0yp, равная сумме
Кроме того, чтобы не допустить ее нулевого значения в зоне нечувствительности θ=±δθ, в аналоговое звено - 73 для определения kп поступает "расчетная" величина поперечного ускорения j0yp, равная сумме  где δj0 - малая положительная величина за пределами разрешающей способности акселерометра, например 0.001g, при которой относительная дополнительная погрешность определения j0y в самом худшем случае не превысит 0.5%.
где δj0 - малая положительная величина за пределами разрешающей способности акселерометра, например 0.001g, при которой относительная дополнительная погрешность определения j0y в самом худшем случае не превысит 0.5%.
Разность заданной и текущей величины Δk=kп0 - kп определяется в сумматоре -74 только при повороте автомобиля и равенстве Sθ=1. Знак начальной величины Δk=Δk0 при входе автомобиля в поворот с разблокированным МКДМ фиксируется дискретными параметрами, отрицательный - и положительный - SΔk2, определяемыми в однополярных релейных звеньях - 75 и 76 с небольшой областью нечувствительности, равной, например, δk0=±0.05. При (-Δk0)≤(-δk0) SΔk1=1, что соответствует kп≥0.95 и избыточной относительно заданного уровня поворачиваемости автомобиля, а при Δk0>δk0 SΔk2=1, что соответствует kп≤0.85 и недостаточной поворачиваемости. Если же при разбокированном МКДМ (-δk0)<Δk0<δk0, что соответствует 0.85<kп<0.95, указанные дискретные параметры равны нулю, то режим разблокировки сохраняется. Равенство SΔk1=1 или SΔk2=1 фиксирует начало функционирования МКДМ в регулируемом режим работы и определяет начальный режим работы гидромашины, в первом случае - гидронасоса, во втором - гидромотора. Поддержание заданной величины kп0 обеспечивается за счет изменения перепада давления Δр=p1-р0 между рабочими полостями гидромашины в регулируемом режиме МКДМ, при котором САУ выполняет функцию автоматического регулятора, а регулирующим параметром является давление p1 либо на входе переливного клапана - 56 (фиг. 5), либо на выходе редукционного клапана - 48. Поэтому наличие указанного перепада давления, превышающего величину потерь давления Δр0 на механическое трение и циркуляцию рабочей жидкости при холостом вращении гидромашины, является признаком регулируемого режима МКДМ. Величина Δр определяется в сумматоре - 77, где р0 - давление в сливной магистрали. Неравенство Δр>Δр0 фиксируется дискретным параметром Sp, равным единице, и определяемым в релейном однополярном звене - 78 с областью нечувствительности Δр0 посредством преобразования аналоговой величины Δр. Условие Sp=1 обеспечивает функционирование САУ МКДМ в случае изменения знака Δk в процессе регулирования и обнуления либо SΔk1 при Δk>0, либо SΔk2 при Δk<0. Текущая величина ошибки Δk и дискретные параметры SΔk1, SΔk2, Sp передаются в электронный блок САУ для формирования аналоговых сигналов управления переливным и редукционным клапаном. В сумматоре - 79 определяется суммарный дискретный параметр SΔk, равный единице при условии  фиксирующий функционирование регулируемого режима МКДМ вне зависимости от режима работы гидромашины и характера поворачиваемости автомобиля. Дискретный параметр SΔk передается в электронный блок САУ для формирования цифрового сигнала включения светового сигнального индикатора панели управления, информирующего о нормальном функционировании МКДМ в регулируемом режиме.
фиксирующий функционирование регулируемого режима МКДМ вне зависимости от режима работы гидромашины и характера поворачиваемости автомобиля. Дискретный параметр SΔk передается в электронный блок САУ для формирования цифрового сигнала включения светового сигнального индикатора панели управления, информирующего о нормальном функционировании МКДМ в регулируемом режиме.
При разблокированном МКДМ разность Δk заданной kп0=0.9 и текущей величины kп не является регулируемой величиной и зависит от заданного радиуса траектории и скорости движения, от относительной весовой нагрузки передней или задней ведущей оси колес автомобиля, а также от дорожных условий. Посредством суммирующего релейного однополярного звена - 80 с областью нечувствительности эта аналоговая величина преобразуется в дискретный сигнал Sδk0, равный нулю при Δk01<Δk<Δk02, где Δk01 и Δk02 - заданные граничные значения Δk, соответствующие допустимой при пониженной скорости движения автомобиля величине показателя kп статической поворачиваемости, при нарушении которых Sδk0=1. Если для этих граничных значений принять (kп)min=0.6 и (kп)max=1, то относительно kп0=0.9, численные значения Δk01 и Δk02 составят (-0.1) и 0.3. Дискретный сигнал Sδk0 передается в электронный блок САУ для формирования цифровой команды включения сигнального светового индикатора на панели управления, предупреждающего о необходимости включения регулируемого режима МКДМ.
В аналоговом звене - 81 определяется независимая от направления поворота автомобиля разность частоты вращения наружного и внутреннего ведущих колес по формуле  где индексы "л" - для левого колеса и "п" - для правого колеса соответствуют правому повороту и Kθ=1. В зависимости от величины Δω в релейном звене - 82 определяется дискретный параметр Sω, равный нулю при Δω>0 и единице при Δω≤<0. Он фиксирует не только выравнивание частоты вращения ведущих колес за счет уменьшения частоты вращения гидромашины до нуля в режиме гидронасоса, но и возможное, как было указано выше, превышение частоты вращения внутреннего относительно наружного ведущего колеса при изменении направления вращения гидромашины в режиме гидромотора. Этот дискретный параметр и его отрицание используются в электронном блоке САУ при формировании аналоговых сигналов управления редукционным и переливным клапаном, а также цифровых команд управления золотниками 49 и 55 (фиг. 5).
где индексы "л" - для левого колеса и "п" - для правого колеса соответствуют правому повороту и Kθ=1. В зависимости от величины Δω в релейном звене - 82 определяется дискретный параметр Sω, равный нулю при Δω>0 и единице при Δω≤<0. Он фиксирует не только выравнивание частоты вращения ведущих колес за счет уменьшения частоты вращения гидромашины до нуля в режиме гидронасоса, но и возможное, как было указано выше, превышение частоты вращения внутреннего относительно наружного ведущего колеса при изменении направления вращения гидромашины в режиме гидромотора. Этот дискретный параметр и его отрицание используются в электронном блоке САУ при формировании аналоговых сигналов управления редукционным и переливным клапаном, а также цифровых команд управления золотниками 49 и 55 (фиг. 5).
В аналоговом звене - 83 определяется разность δр задаваемого при фиксированной настройке переливного клапана предельного давления рmax, и текущей величины p1 - давления в выходной полости гидромашины, работающей в режиме гидронасоса. В этом случае переливной клапан используется в качестве предохранительного клапана для ограничения максимального давления рmax в выходной полости гидромашины в случае прямолинейного движения автомобиля при полной блокировке МКДМ. Этот аналоговый параметр используется в электронном блоке управления САУ при формировании аналогового сигнала управления переливным клапаном. В релейном звене - 84 с областью нечувствительности δр0, соответствующей статической ошибке фиксированной настройки давления p1, аналоговый параметр δр преобразуется в дискретный Sδp, который используется в электронном блоке САУ для формирования цифровой команды включения светового индикатора на панели управления, информирующей о включенной блокировке МКДМ.
При непрямолинейном движении автомобиля в неблагоприятных дорожных условиях, например, на мокром и загрязненном асфальтобетонном или непросохшем грунтовом дорожном полотне запас сцепления ведущих колес снижается. Это приводит к снижению коэффициента сопротивления боковому уводу ведущих колес, увеличению их углов бокового увода и изменению траектории движении. При регулируемом режиме МКДМ сохранение заданного курса движения обеспечивается за счет автоматического изменения стабилизирующей разности крутящих моментов ведущих колес ΔМст. Наибольшая величина ее достигается при работе гидромашины в режиме гидромотора при предельной нагрузке наружного переднего ведущего колеса в случае недостаточной поворачиваемости (Sω=0), характерной для переднеприводных автомобилей, поскольку в этом случае ΔМст увеличивается из-за постоянно действующего момента сопротивления повороту от положительной разности сил сопротивления качению наружных с большей весовой нагрузкой и внутренних с меньшей весовой нагрузкой колес автомобиля. А в случае избыточной поворачиваемости указанный момент сопротивления, наоборот, снижает величину ΔМст. В первом случае из-за увеличенной величины ΔМст запас сцепления более нагруженного наружного переднего ведущего колеса снижается в продольном и поперечном направлении. Последний фактор способствует уменьшению сопротивления и увеличению угла боковому уводу указанного колеса, что может привести к боковому заносу ведущих колес переднеприводного автомобиля. В случае избыточной поворачиваемости, свойственной заднеприводным автомобилям с более высокой относительной весовой нагрузкой задних ведущих колес, то при невысоких скоростях (50…70) км/час и увеличенной кривизне траектории движения автомобиля необходимая величина ΔМст обеспечивается гидромашиной в режиме гидронасоса при (Sω=0) за счет выравнивания частоты вращения ведущих колес даже на непросохшем грунтовой дороге. Однако при скорости 100 км/час и выше на непросохшем асфальте из-за уменьшенной кривизны траектории движения автомобиля, снижающей эффективность выравнивания частоты вращения ведущих колес, перевод гидромашины в режим гидромотора с изменением направления вращения (при Sω=1), даже с учетом пониженной величины ΔМст, запаса сцепления внутреннего ведущего заднего колеса может оказаться недостаточно. Для предупреждения подобной критической ситуации предложен аналоговый параметр ν=δωр/Δр, где δωр - относительная величина изменения разности частоты вращения ведущих колес за счет регулируемого изменения ΔМст определяется формулой  Знаменатель в этой формуле ωср - средняя частота вращения ведущих колес, а числитель представляет собой положительную разницу между абсолютной величиной измеряемой (фактической) разности частоты вращения
Знаменатель в этой формуле ωср - средняя частота вращения ведущих колес, а числитель представляет собой положительную разницу между абсолютной величиной измеряемой (фактической) разности частоты вращения  ведущих колес и ее "теоретической" величиной без учета скоростных потерь ведущих колес
ведущих колес и ее "теоретической" величиной без учета скоростных потерь ведущих колес  пропорциональной абсолютной величине угловой скорости
пропорциональной абсолютной величине угловой скорости  поворота автомобиля, где В - ширина колеи колес, rс - статический радиус ведущих колес. Поскольку перепад давления гидромашины, работающей в режиме гидромотора, Δр>0, параметр ν всегда положителен. В области линейной зависимости коэффициента скоростных потерь более нагруженного ведущего колеса от его крутящего момента, ΔМст и соответственно, перепад давления Δр практически пропорциональны δωр. Поэтому величина ν при наличии запаса сцепления у ведущих колес практически постоянная, а ее производная по времени ε=dν/dt равна нулю. В случае потери сцепления и начале бокового скольжения ведущих колес пропорциональная связь δωр и ΔМст нарушается и величина е начинает возрастать. В релейном звене - 85 с областью нечувствительности - δε>0 аналоговая величина е преобразуется в дискретный параметр Sε=1 при ε≥δε и Sε=0 при ε<δε. Этот дискретный параметр передается в электронный блок САУ для формировании цифровой команды включения на панели управления светового индикатора, информирующего о превышении скорости непрямолинейного движения.
поворота автомобиля, где В - ширина колеи колес, rс - статический радиус ведущих колес. Поскольку перепад давления гидромашины, работающей в режиме гидромотора, Δр>0, параметр ν всегда положителен. В области линейной зависимости коэффициента скоростных потерь более нагруженного ведущего колеса от его крутящего момента, ΔМст и соответственно, перепад давления Δр практически пропорциональны δωр. Поэтому величина ν при наличии запаса сцепления у ведущих колес практически постоянная, а ее производная по времени ε=dν/dt равна нулю. В случае потери сцепления и начале бокового скольжения ведущих колес пропорциональная связь δωр и ΔМст нарушается и величина е начинает возрастать. В релейном звене - 85 с областью нечувствительности - δε>0 аналоговая величина е преобразуется в дискретный параметр Sε=1 при ε≥δε и Sε=0 при ε<δε. Этот дискретный параметр передается в электронный блок САУ для формировании цифровой команды включения на панели управления светового индикатора, информирующего о превышении скорости непрямолинейного движения.
На основе определяемых в вычислительном блоке (фиг. 8) ошибок регулирования: показателя статической поворачиваемости автомобиля Δk при непрямолинейном движении и заданной величины давления переливного клапана в режиме блокировки МКДМ δр при прямолинейном движении, а также указанных выше дискретных параметров в электронном блоке САУ формируются аналоговые сигналы управления "пропорциональными" соленоидами Су1 переливного клапана и Су2 редукционного клапана, а также цифровые команды включения соленоидов С0…С4 золотников и их электропитания.. На фиг. 9 представлена функциональная схема электронного блока САУ МКДМ. Аналоговые сигналы управления клапанами поступают на входы соответствующих ЭБУ, а цифровые команды - включения соленоидов и их электропитания - на входы постоянно разомкнутых управляющих реле РЭ0…РЭ4.
При выключенных ручных кнопках Ky1 и Kу2 на панели управления, электропитание указанных соленоидов отсутствует, что обеспечивает нейтральное положение трехпозиционных золотников - 49 и 55 и разблокировку МКДМ. Для включения электропитания соленоидов цифровая команда u0, поступающая на вход реле РЭ0, определяется логической формулой:  где u01, u02 - цифровые сигналы включения ручных кнопок Ку1, и Ку2, поступающие в электронный блок САУ из панели управления, a (-Sz)=(Sz1)∧(-Sz2) - цифровой сигнал отрицания (т.е. отсутствия) как торможения, так и движения автомобиля задним ходом, требующих разблокировку МКДМ.
где u01, u02 - цифровые сигналы включения ручных кнопок Ку1, и Ку2, поступающие в электронный блок САУ из панели управления, a (-Sz)=(Sz1)∧(-Sz2) - цифровой сигнал отрицания (т.е. отсутствия) как торможения, так и движения автомобиля задним ходом, требующих разблокировку МКДМ.
Включение режима МКДМ, сочетающего его блокировку при прямолинейном с его разблокировкой при непрямолинейном движении, осуществляется ручной кнопкой Ку1, фиксируемого цифровым сигналом u01=1, при выключенной ручной кнопки Ку2. В этом случае аналоговый сигнал управления uг1 для ЭБУ переливного клапана формируется на основе ошибки 6р настройки давления переливного клапана на заданную фиксированную величину, соответствующую блокировке МКДМ. Его величина при прямолинейном движении и (-Sθ)=1 определяется произведением: 
Включение регулируемого режима МКДМ осуществляется ручной кнопкой Ку2, но функционировать САУ начинает только при Sθ=1, когда абсолютная величина расчетного угла поворота передних колес преодолевает зону нечувствительности δθ0. Знак начального значения ошибки регулирования Δk=Δk0 определяется характером поворачиваемости автомобиля. В случае положительной величины Δk0 при kп<kп0 и SΔk2=1 (SΔk1=0) при недостаточной поворачиваемости положительный аналоговый сигнал управления uг2, пропорциональный ошибке регулирования Δk, поступает на вход ЭБУ редукционного клапана, вызывая увеличение давления редукционного клапана. В этом случае формула для его определения имеет вид:  где цифровой сигнал
где цифровой сигнал  В случае отрицательной величины Δk0 при kп>kп0 и SΔk1=1 (SΔk2=0) при избыточной относительно заданного уровня поворачиваемости и работе гидромашины в режиме гидронасоса для снижения регулируемого параметра kп требуется положительный аналоговый сигнал uг1 на входе в ЭБУ переливного клапана с целью увеличения перепада давления в рабочих полостях гидромашины, что не соответствует отрицательной величине ошибки регулирования Δk. Поэтому в этом случае знак ошибки регулирования Δk посредством корректирующего множителя (-1) изменяется и формула для определения uг1 имеет вид:
В случае отрицательной величины Δk0 при kп>kп0 и SΔk1=1 (SΔk2=0) при избыточной относительно заданного уровня поворачиваемости и работе гидромашины в режиме гидронасоса для снижения регулируемого параметра kп требуется положительный аналоговый сигнал uг1 на входе в ЭБУ переливного клапана с целью увеличения перепада давления в рабочих полостях гидромашины, что не соответствует отрицательной величине ошибки регулирования Δk. Поэтому в этом случае знак ошибки регулирования Δk посредством корректирующего множителя (-1) изменяется и формула для определения uг1 имеет вид:  где цифровой сигнал
где цифровой сигнал 
При включении САУ, как уже указывалось выше, МКДМ разблокирован и вне зависимости от знака начального значения Δk0 ошибки регулирования и режима работы гидромашины перепад давления Δр начинает возрастать практически от нуля (при Δр0≈0). При Δр>Δр0 дискретный параметр Sp=1 и логические суммы (SΔk1 ν Sp) и (SΔk2 ν Sp) равны единице независимо от величины SΔk1 и SΔk2. Процесс регулирования завершается в случае минимизации (до уровня статической ошибки САУ) ошибки регулирования Δk.
Увеличение перепада давление переливного клапана сопровождается уменьшением разности частоты вращения наружного и внутреннего ведущих колес. При снижении ее до нуля перепад давления достигает максимума. Если при этом в случае чрезмерной избыточной поворачиваемости автомобиля kп>kп0 и SΔk1=1 сохраняется, при Sω=1 гидромашина переключается в режим гидромотора и на вход ЭБУ редукционного клапана поступает аналоговый сигнал uг2. В этом случае Δk0<0, SΔk1=1 и  где
где  Как и в рассмотренном выше режиме гидронасоса знак Δk меняется на противоположный.
Как и в рассмотренном выше режиме гидронасоса знак Δk меняется на противоположный.
При одновременном включении обеих ручных кнопок Кy1 и Ку2 режим блокировки МКДМ при прямолинейном движении (-Sθ=1) сочетается с его регулируемом режимом в случае повороте автомобиля (Sθ=1). Соответствующие аналоговые сигналы управления в обоих режимах были рассмотрены выше.
При формировании аналоговых сигналов uг1 и uг2 управления переливным и редукционным клапаном "определяющими" цифровыми сигналами являются, рассмотренные выше S01, S02, S04 и (-Sθ). Эти же цифровые сигналы используются при формировании цифровых команд управления соленоидами С3 и С4 золотника - 55 (фиг. 5), которые определяют режим работы гидромашины. При включении соленоида С3 - режим гидромотора, а при включении соленоида С4 - режим гидронасоса. В режиме гидромотора гидромашина используется при S04=1 и (-Sω) при недостаточной поворачиваемости, а при S02=1 и Sω=1 при чрезмерной избыточной поворачиваемости. В режиме гидронасоса гидромашина используется при S01=1 и (-Sω)=1 в случае умеренной относительно заданного уровня избыточной поворачиваемости при kп>kп0=0.9. С использованием указанных выше выражений дискретных параметров цифровая команда u3 для включения соленоида С3 определяется логической формулой  где первое слагаемое логической суммы соответствует увеличению регулируемого параметра kп в случае недостаточной поворачиваемости автомобиля, а второе - его снижению при чрезмерной избыточной поворачиваемости. При блокировке МКДМ в случае прямолинейного движения и его регулируемом режиме в случае поворота автомобиля цифровая команда u4 для включения соленоида С4 определяется логической формулой
где первое слагаемое логической суммы соответствует увеличению регулируемого параметра kп в случае недостаточной поворачиваемости автомобиля, а второе - его снижению при чрезмерной избыточной поворачиваемости. При блокировке МКДМ в случае прямолинейного движения и его регулируемом режиме в случае поворота автомобиля цифровая команда u4 для включения соленоида С4 определяется логической формулой  где первое слагаемое логической суммы соответствует режиму блокировки МКДМ, а второе - регулируемому режиму МКДМ и снижению kп в случае избыточной относительно заданного уровня kп0 поворачиваемости.
где первое слагаемое логической суммы соответствует режиму блокировки МКДМ, а второе - регулируемому режиму МКДМ и снижению kп в случае избыточной относительно заданного уровня kп0 поворачиваемости.
Как уже было указано, переключения золотника - 49 соленоидами С1 и С2 из нейтрального блокирующего вращение гидромашины положения в рабочие положения происходят только после включения соленоида С3 золотника - 55 и равенстве цифровой команды из единице. В зависимости от включаемого соленоида задается направление вращения гидромашины в режиме гидромотора и ее крутящего момента, который пропорционален стабилизирующему моменту от положительной при заданном повороте управляемых колес разности касательных сил тяги наружного и внутреннего ведущих колес. В одном рабочем положении золотника - 49, задаваемом цифровой командой u1, указанный стабилизирующий момент снижает момент сопротивления повороту автомобиля в случае недостаточной поворачиваемости ((-Sω)=1 и SΔk2=1) при повороте управляемых колес, например, вправо (Skθ=1) и увеличивает этот момент в случае чрезмерной избыточной поворачиваемости (Sω=1 и SΔk1=1) при их повороте влево ((-Skθ)=1), а в другом рабочем положении золотника, задаваемого цифровой командой u2, указанным изменениям момента сопротивления повороту при недостаточной и чрезмерной избыточной поворачиваемости соответствуют поворот управляемых колес влево и вправо, соответственно. С учетом этого цифровые команды u1 и u2 определяются следующими логическими формулами:

В электронном блоке САУ формируются также цифровые команды для включения световых сигнальных индикаторов зеленого цвета на панели управления, информирующих о нормальном функционировании МКДМ в каждом из задаваемых режимов, и сигнальных индикаторов красного цвета, предупреждающих водителя об опасности продолжения движения с выключенной САУ МКДМ и о необходимости снижения скорости непрямолинейного движения автомобиля при регулируемом режиме МКДМ, а также информирующих о неисправности гидравлической системы управления МКДМ.
Режиму разблокировки МКДМ при прямолинейном и непрямолинейном движении соответствует выключенное постоянно разомкнутое реле РЭО. Поэтому цифровая команда  включения сигнального индикатора, информирующего о работе МКДМ в режиме разблокировки, определяется логической суммой дискретного сигнала Sz, фиксирующего либо перемещение тормозной педали, либо включение заднего хода автомобиля, и произведения отрицаний цифровых сигналов (-u01) и (-u02) включения кнопок Кy1 и Ку2.
включения сигнального индикатора, информирующего о работе МКДМ в режиме разблокировки, определяется логической суммой дискретного сигнала Sz, фиксирующего либо перемещение тормозной педали, либо включение заднего хода автомобиля, и произведения отрицаний цифровых сигналов (-u01) и (-u02) включения кнопок Кy1 и Ку2.
Режиму блокировки МКДМ соответствует прямолинейное движение и дискретный параметр (-Sθ)=1, а также уменьшенное до величины статической ошибки δр0 (фиг. 8) отклонение давления на входе переливного клапана от заданной величины, фиксируемое равенством дискретного параметра Sδp единице. В связи с этим цифровая команда включения сигнального индикатора, информирующего о работе МКДМ в режиме блокировки определяется логическим произведением 
Нормальному функционированию МКДМ в регулируемом режиме вне зависимости от режима работы гидромашины и характера компенсируемой поворачиваемости либо недостаточной, либо избыточной соответствует наличие перепада давления между рабочими полостями гидромашины и равенство SР=1, а также снижение ошибки Δk регулирования ниже заданной величины δk0, например, ±0.05. Последнему условию соответствует отрицанию указанного выше дискретного параметра (-SΔk). Тогда цифровая команда включения сигнального индикатора, информирующего о нормальном функционировании МКДМ в регулируемом режиме, определяется логическим произведением 
Для обеспечения боковой устойчивости непрямолинейного движения автомобиля с разблокированным МКДМ, например, из-за несоответствия скорости движения дорожным условиям, необходимо своевременное включение регулируемого режима МКДМ. Для этого в электронном блоке с использованием дискретного сигнала Sδk0, фиксирующего выход величины Δk за пределы заданных в вычислительном блоке граничных значений Δk01 и Δk02, формируется цифровая команда включения светового сигнального индикатора, информирующего о необходимости включения регулируемого режима МКДМ. Эта цифровая команда определяется логическим произведением дискретного сигнала Sδk0 и цифрового сигнала u00, соответствующего режиму разблокировки МКДМ: 
Превышение скорости непрямолинейного движения автомобиля при включенной САУ МКДМ фиксируется указанным выше дискретным параметром Sε=1. Поскольку непрямолинейному движению соответствует равенство дискретного параметра Sθ=1, цифровая команда включения сигнального индикатора, информирующего о необходимости снижения скорости непрямолинейного движения автомобиля, определяется, как логическое произведение двух указанных дискретных параметров - 
Фиксируемыми неисправностями гидравлической системы управления являются недостаточное ниже заданного уровня давление рабочей жидкости рсл в сливной магистрали, контролируемое реле давления РД-СЛ, и давление ра в гидроаккумуляторе, контролируемое реле давления РД-А. Соответствующие включениям этих реле цифровые сигналы Sрел и Sра, поступают в электронный блок САУ, где цифровая команда u50 включения сигнального светового индикатора, информирующая о неисправности гидравлической системы, определяется, как логическая сумма этих сигналов 
Принципиальная схема панели управления и световой индикации представлена на фиг. 10. Панель управления кроме указанных выше ручных кнопок управления Кy1 и Ку2 включает шесть реле РЭ00…РЭ50 с постоянно разомкнутыми контактами, управляющих включением соответствующих световых индикаторов, трех Л00…Л20 зеленого цвета и трех Л30…Л50 красного цвета. Для включения световых индикаторов зеленого цвета в указанные реле из электронного блока САУ поступают указанные выше цифровые сигналы: u00…u20, а для включения световых индикаторов красного цвета - цифровые сигналы u30…u50 в соответствии с индексами обозначения индикаторов Л00…Л50.
В условиях городских улиц при ограниченной скорости, как прямолинейного движения, так и выполнения поворотов САУ может быть выключена и МКДМ разблокирован. Нет необходимости и включения режима блокировки МКДМ при прямолинейном движения. Поэтому кнопки Кy1 и Ку2 на панели управления могут быть выключены. При выезде же на кольцевые городские автомагистрали и загородные автотрассы необходимо включение регулируемого режима МКДМ. В этом режиме САУ МКДМ поддерживает в процессе поворота автомобиля заданный уровень. kп0 регулируемого параметра - показателя поворачиваемости kп за счет непрерывного и автоматического симметричного перераспределения касательных тяги ведущих колес и изменения их разности в соответствии с величиной поперечного ускорения, угловой скорости поворота и распределением весовой нагрузки по осям автомобиля и обеспечивает либо поворачивающий, либо препятствующий повороту автомобиля стабилизирующие моменты. Величина поперечного ускорения может изменяться от 0.03g до максимального значения, ограничиваемого сцеплением ведущих колес. На сухом твердом дорожном покрытии, например, величина центростремительного ускорения автомобиля на закругленных участках автотрассы может достигать до 0.50g.
При заданном уровне регулируемого параметра kп0=0.9 обеспечивается не только хорошая управляемость, поскольку поворачиваемость автомобиля близка к нейтральной, но и возможность увеличения скорости непрямолинейного движения автомобиля в сравнении с его скоростью при разблокированном МКДМ. Например, на сухом твердом дорожном покрытии в зависимости от распределения весовой нагрузки оно может составить от 2% до 8% при заднем приводе и от 15% до 16% при переднем.
Кроме того предлагаемая САУ МКДМ обеспечивает однозначную взаимосвязь угла поворота руля и радиуса поворота автомобиля, независящую ни от скорости движения в пределах допустимого сцепления для любого дорожного покрытия, ни от распределения весовой нагрузки по осям автомобиля. Это существенно снижает нагрузку водителя по управлению автомобилем либо при высокоскоростном движении, либо при неблагоприятных погодных и дорожных условиях.
В последнем случае из-за снижении сцепления ведущих колес, возможной разности коэффициентов сопротивления качению правых и левых колес, наличия поперечных уклонов дорожного полотна необходимо обязательное включение обеих ручных кнопок Кy1 и Ку2. В этом случае регулируемый режим МКДМ при повороте автомобиля дополняется автоматически включаемой при выходе из поворота и прямолинейном движении автомобиля блокировкой МКДМ, повышающей курсовую устойчивость движения. При входе в поворот блокировка МКДМ автоматически выключается.
При аварийной буксировке автомобиля и неработающем двигателе электропитание САУ МКДМ отключено, трехпозиционный золотник - 55 гидравлической системы в нейтральном положении соединяет обе рабочие полости гидромашины со сливной магистралью, обеспечивая разблокировку МКДМ. При повороте автомобиля с включенной САУ разблокировка МКДМ включается автоматически при включении передачи заднего хода и при торможении автомобиля.
Предлагаемый регулируемый межколесный дифференциальный механизм может быть использован и в комбинированной электромеханической трансмиссии электромобилей в тех случаях, когда используется ведущий мост с механическим межколесным дифференциалом.
Источники информации
1. Селифонов В.В. и др. Теория автомобиля. Учебное пособие. М.: МГТУ “МАМИ”, 2007 г.
2. Снимщиков В.К. Управляемый межколесный (межосевой) дифференциал. Патент RU №2376515 С2, от 20.08.2007.
3. Габай Е.В., Габай О.Е. Механическая трансмиссия с системой автоматического управления расределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов. Патент RU №2706681 от 10.04.2019.
4. Габай Е.В. Габай О.В. Механическая трансмиссия АТС (4к4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении. Патент RU №2749974 от 22.07.2020.
5. Карпиков С.Р. Цифровой автоколебательный микроакселерометр с электромагнитным силовым приводом для систем навигации и управления подвижными объектами. Диссертация на соискание ученой степени к.т.н., С-Петербург, 2019.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| Устройство управления гидропередачами технологических тележек транспортного средства | 1980 |
|
SU912557A1 |
| СИСТЕМА КОНТРОЛЯ ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИИ МАШИНЫ | 2013 |
|
RU2545144C2 |
| Транспортное средство | 1983 |
|
SU1154117A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА МАШИНЫ С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2529111C1 |
| Транспортное средство | 1977 |
|
SU679435A1 |
| ЗЕМЛЕРОЙНО-ТРАНСПОРТНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2537434C1 |
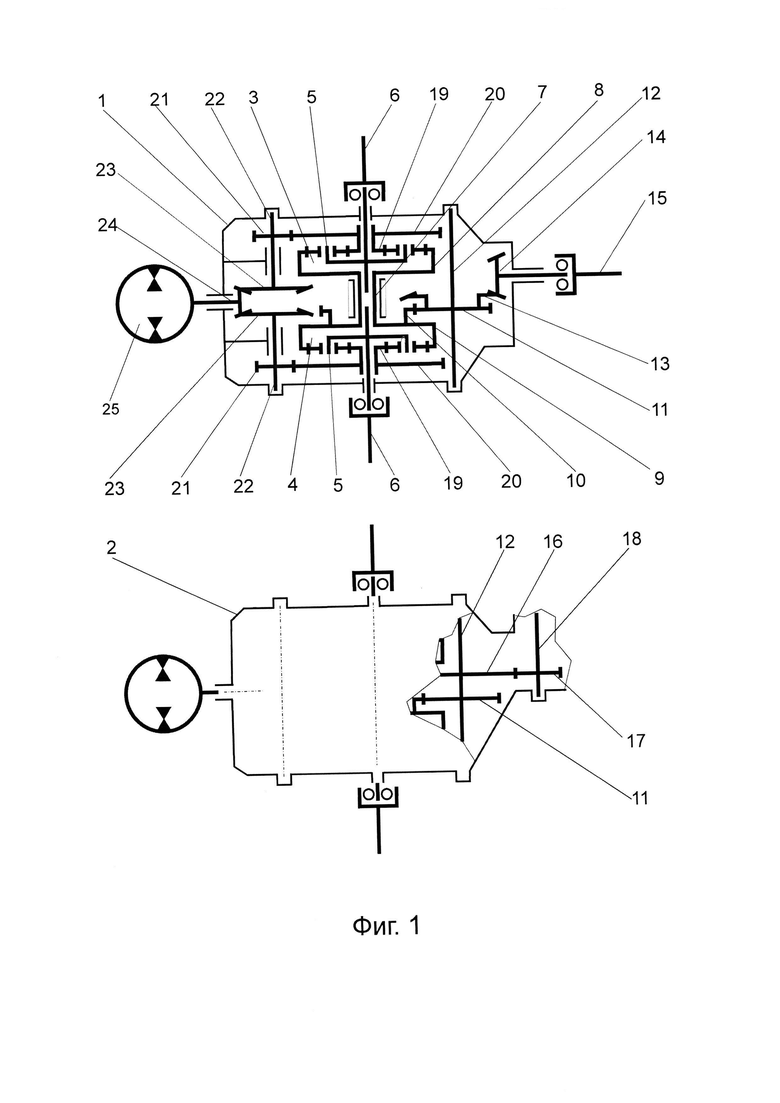
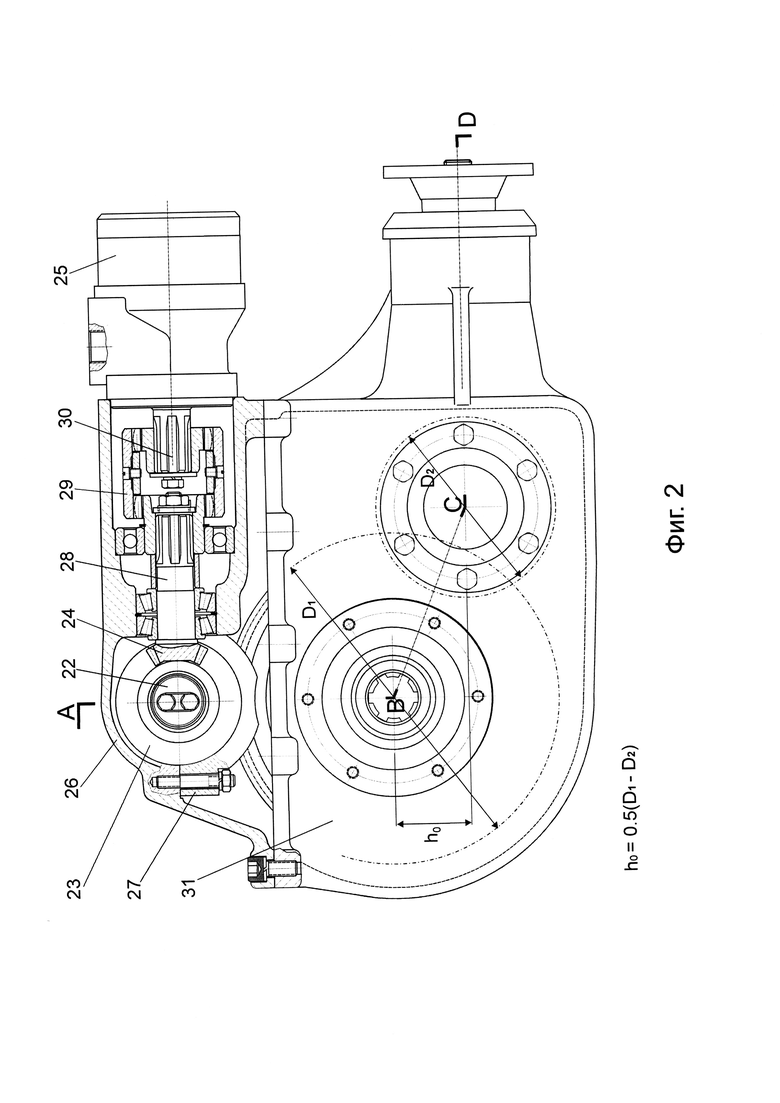
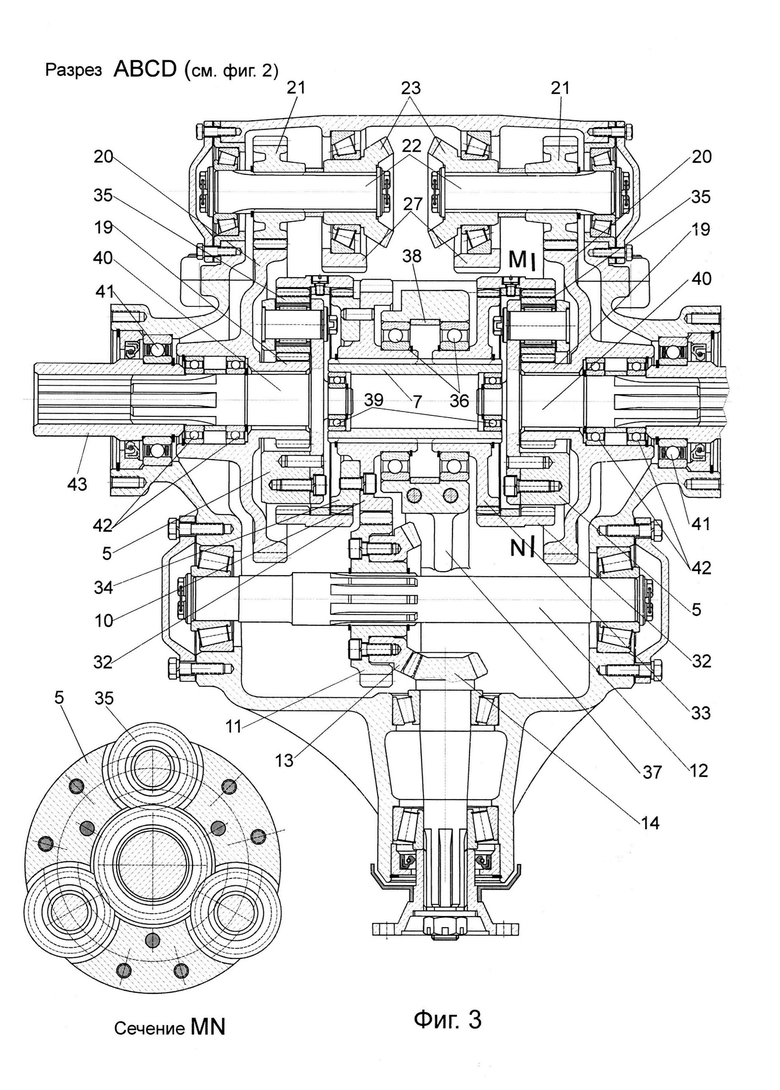
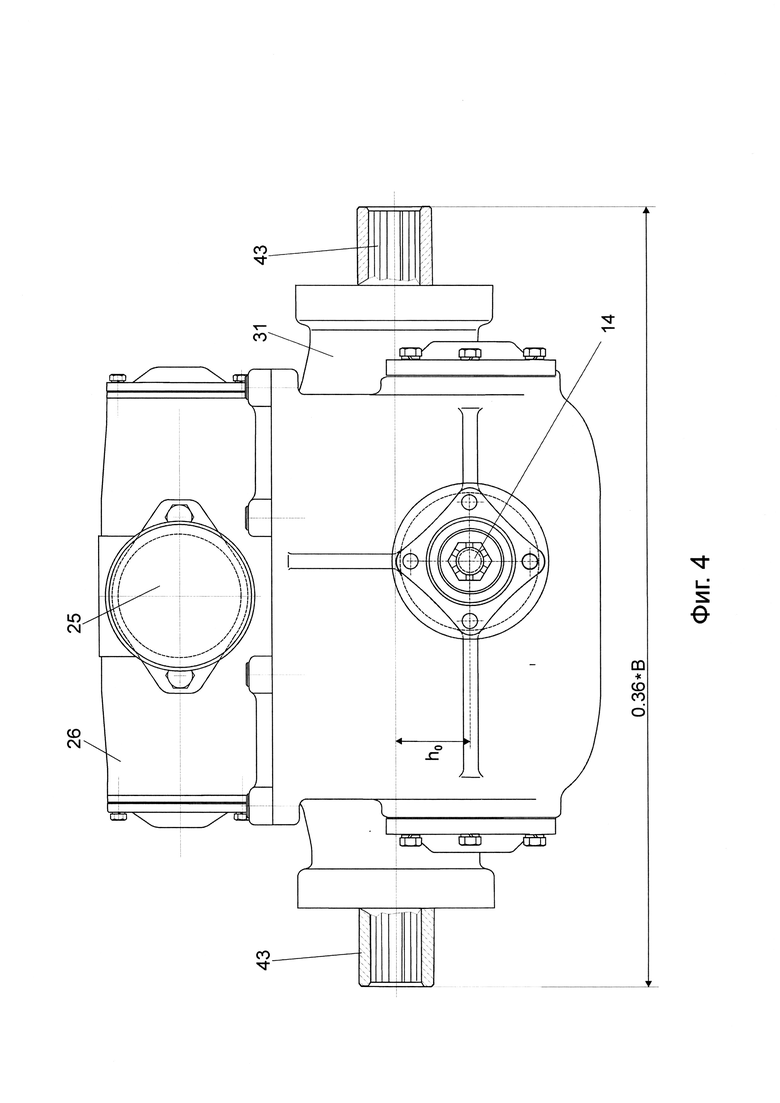
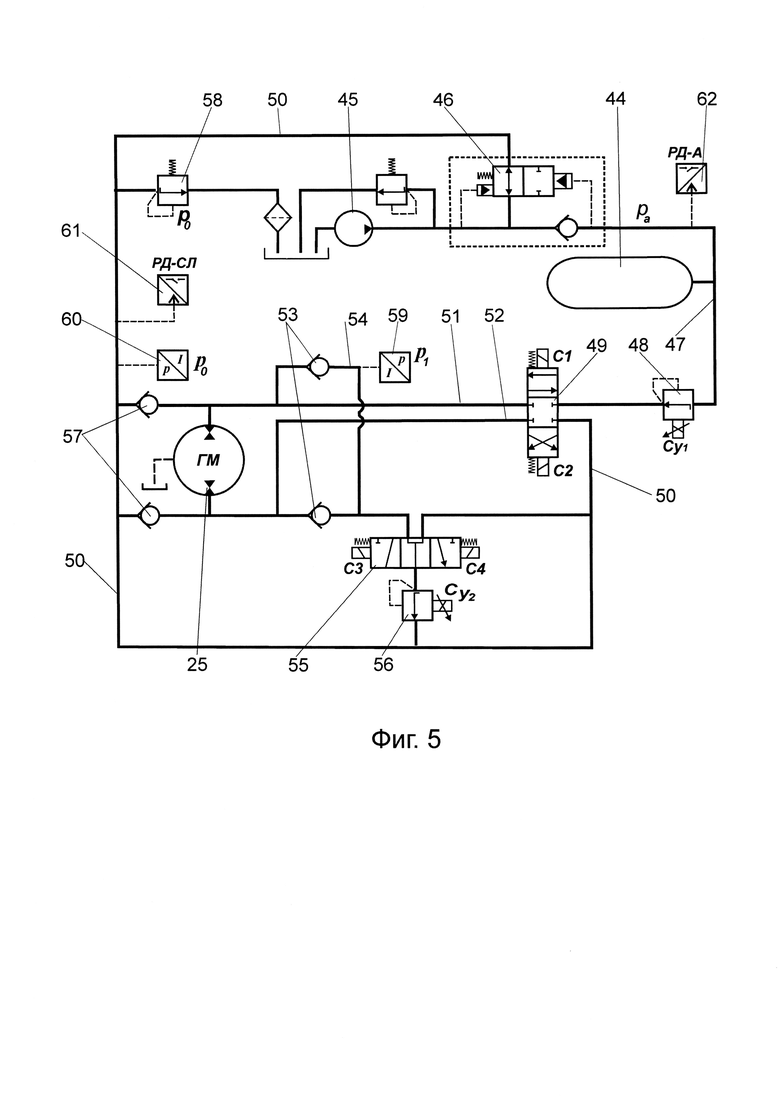
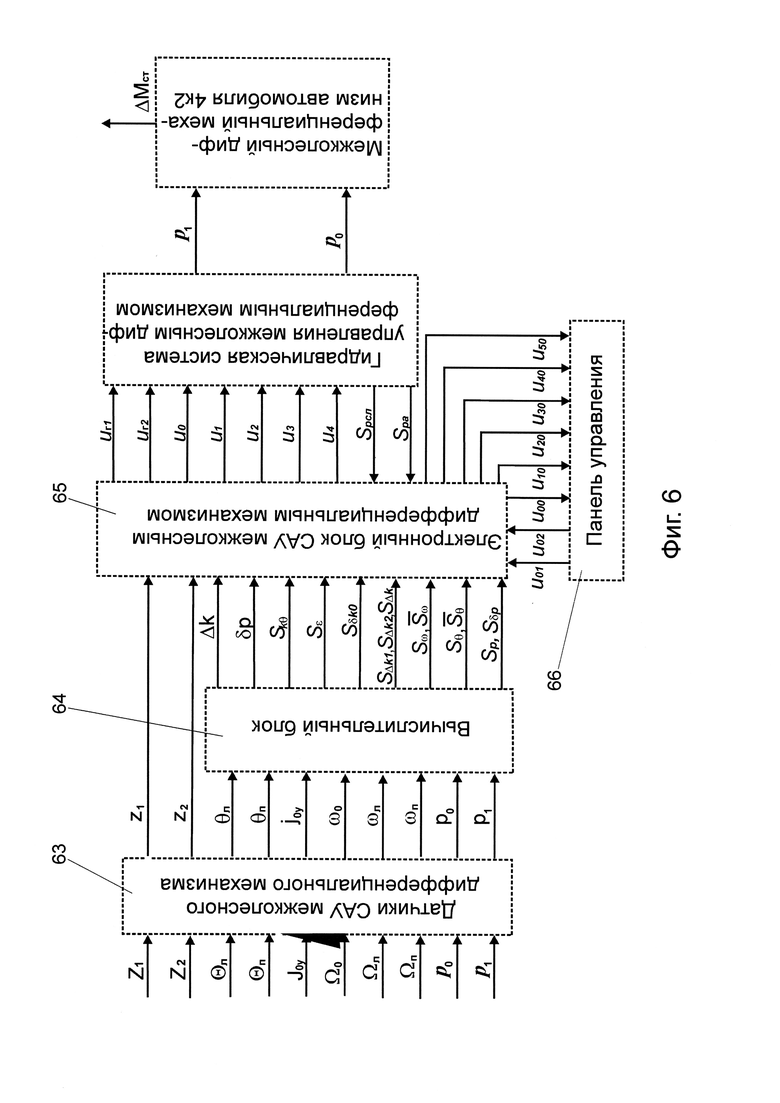
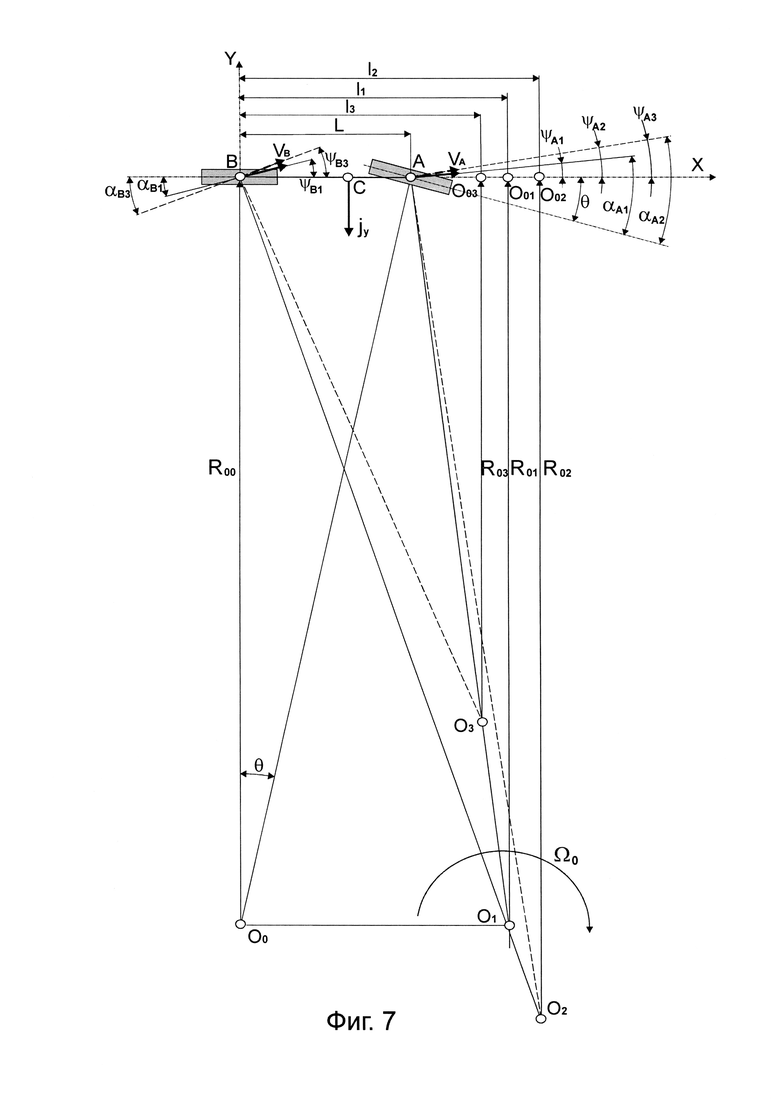
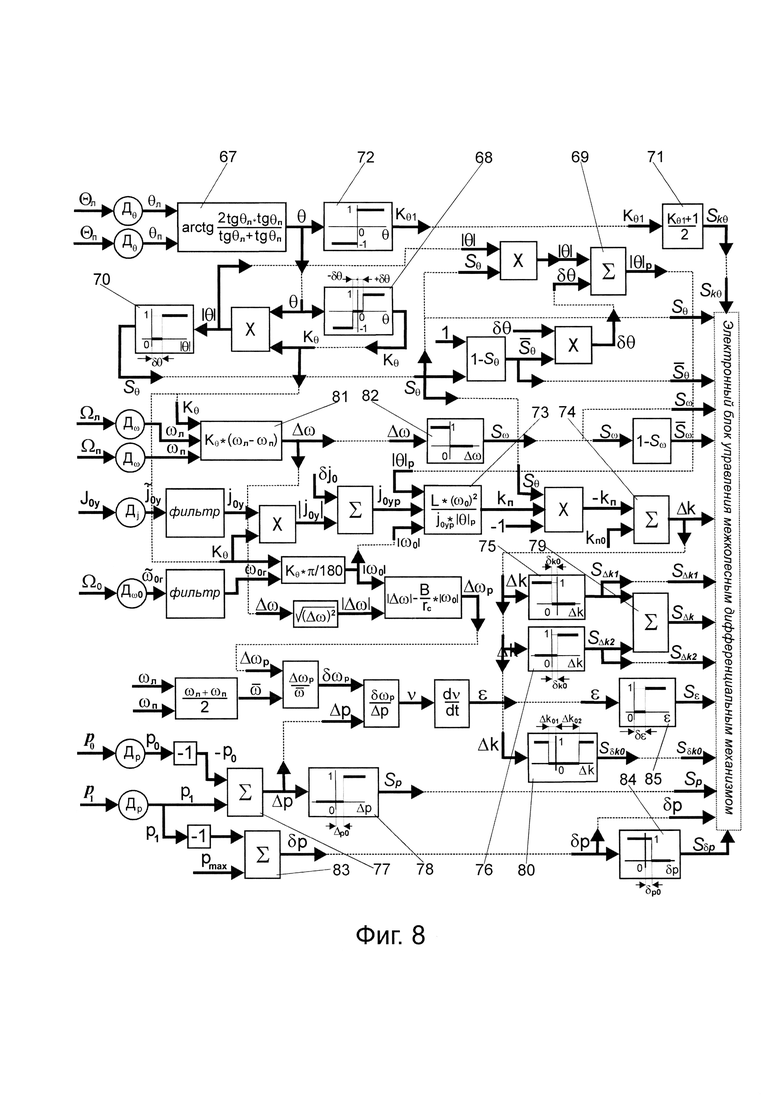
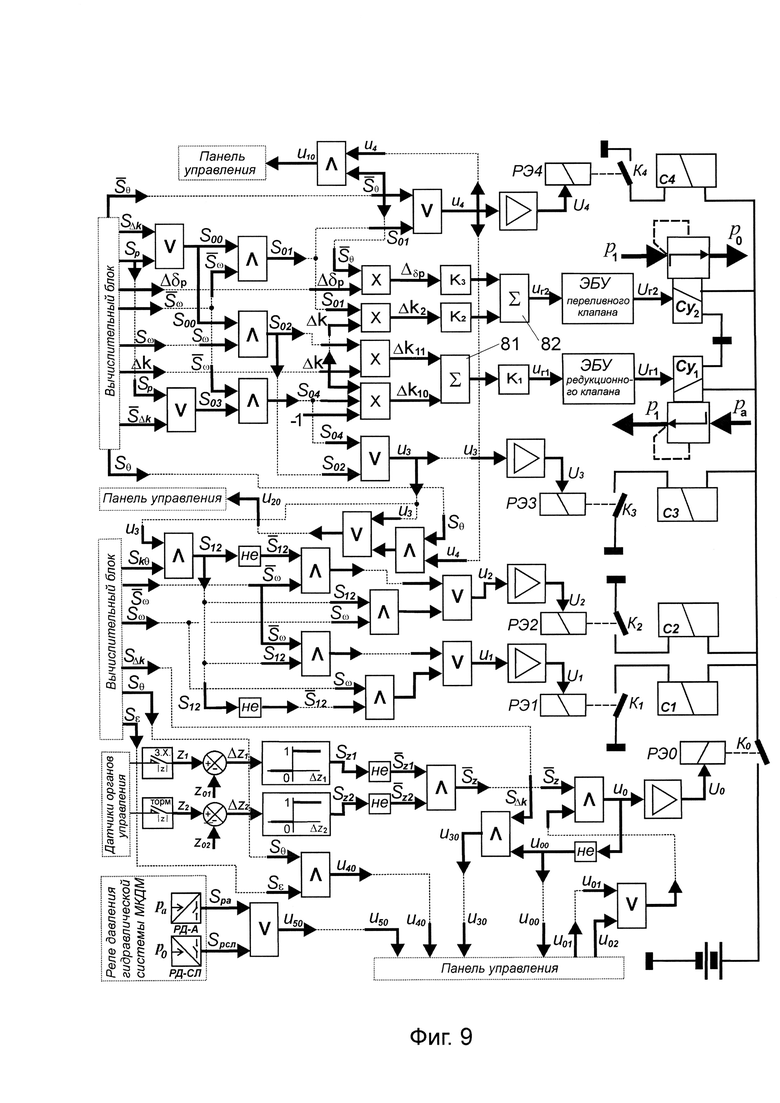
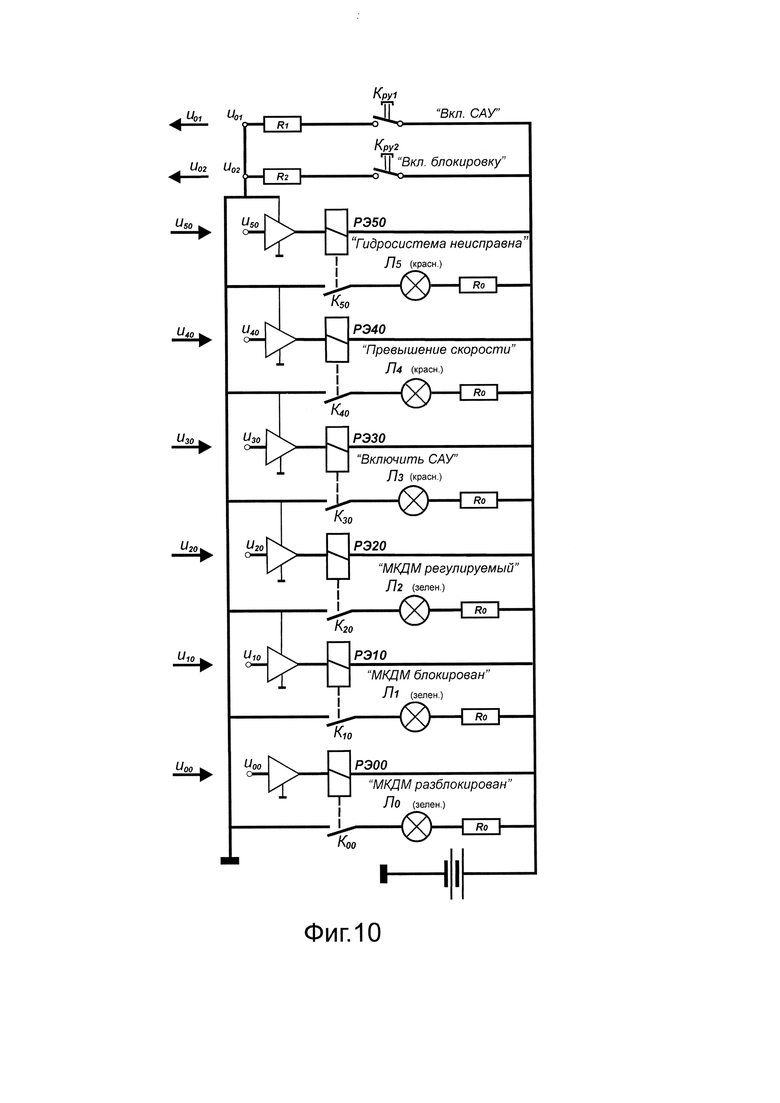
Изобретение относится к конструкции задних и передних ведущих мостов для легковых автомобилей. Межколесный дифференциальный механизм (МКДМ) содержит два однорядных планетарных механизма. Ведомые звенья – водила связаны с полуосями ведущих колес. Ведущие звенья – коронные шестерни закреплены на центрально расположенном трубчатом вале, который приводится шестеренной цилиндрической парой от ведомого вала главной передачи. Управляющие звенья – солнечные шестерни кинематически связаны с валом обратимой и реверсируемой объемной гидромашины посредством двух цилиндрических и двух конических шестеренных пар с общей ведущей конической шестерней. Гидромашина подключена к гидравлической системе с автоматически подзаряжаемым гидроаккумулятором и электроуправляемыми двумя трехпозиционными золотниками, редукционным и переливным клапанами. САУ осуществляет автоматическое регулирование перепада давления между ее рабочими полостями вне зависимости от режима ее работы и направления ее вращения и соответствующей разности крутящих моментов ведущих колес. САУ в режиме автоматического регулятора поддерживает заданную безразмерную величину kп=0.9 показателя статической поворачиваемости автомобиля, текущие значения которого определяются угловой скоростью поворота автомобиля, поперечным ускорением центра масс, углом поворота управляемых колес, а также длиной его колесной базы. При прямолинейном движении автомобиля увеличение курсовой устойчивости обеспечивается режимом блокировки МКДМ посредством перекрытия входной и выходной полости гидромашины, который при входе автомобиля в поворот автоматически переключается либо в указанный выше регулируемый режим, либо в режим разблокировки. Достигается повышение курсовой устойчивости автомобиля. 3 з.п. ф-лы, 10 ил.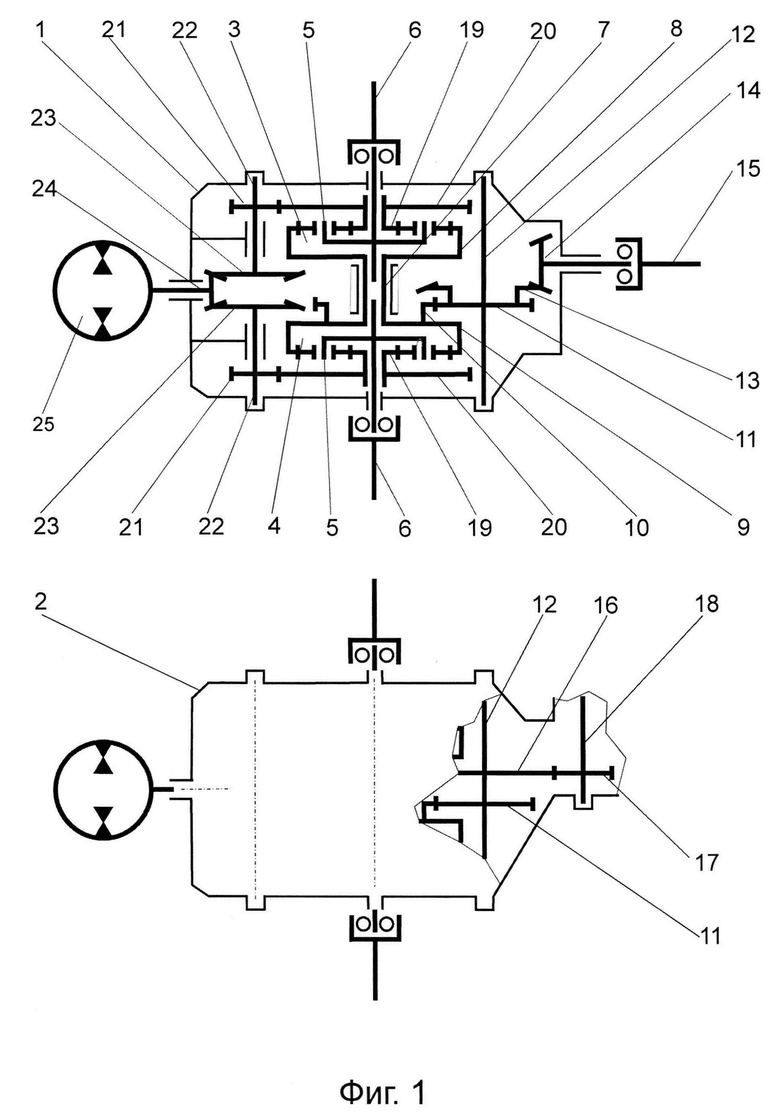
1. Регулируемый межколесный дифференциальный механизм (МКДМ) для легковых автомобилей (4к2), содержащий два однорядных планетарных механизма, ведомыми звеньями которых являются водила, а управляющими - солнечные шестерни с кинематической связью, обеспечивающей при непрямолинейном движении их разнонаправленное с одинаковой частотой вращение либо свободное в разблокированном режиме, либо принудительное, регулируемое посредством объемной реверсируемой и обратимой гидромашины, работающей либо в ведущем режиме гидромотора, либо в ведомом режиме гидронасоса, подключенной к гидравлической системе с электроуправляемыми золотниками и питанием от гидроаккумулятора, обеспечивающей знакопеременную стабилизирующую разность крутящих моментов ведущих колес за счет регулирующих перепад давления в ее рабочих полостях клапанов с пропорциональным электроуправлением, которые, как и гидромашина, являются исполнительными механизмами системы автоматического управления (САУ), в режиме автоматического регулятора поддерживающей заданную величину регулируемого параметра - показателя статической поворачиваемости, а также осуществляющей дискретное управление золотниками гидравлической системы, которая содержит: датчики угла поворота управляемых колес, частоты вращения ведущих колес, угловой скорости поворота автомобиля в плоскости качения, акселерометр над центром масс автомобиля, датчики и реле давления в гидравлической системе, а также датчики включения передачи заднего хода и перемещения тормозной педали, вычислительный блок, в котором определяются параметры траектории движения, текущие значения регулируемого параметра kп и ошибки регулирования - разности заданного kп0 и текущего kп значений, а также дискретный параметр, определяющий правое Kθ=1 и левое Kθ=0 направление поворота автомобиля, и дискретный параметр Sω, фиксирующий либо равенство, либо отрицательную разность частоты вращения наружного и внутреннего ведущих колес, электронный блок для формирования аналоговых сигналов управления регулируемыми клапанами в двух указанных режимах работы гидромашины, а также цифровых команд переключения электроуправляемых золотников гидравлической системы и включения световых сигнальных индикаторов на панели управления, информирующих о режимах работы МКДМ, неисправности гидравлической системы и превышении допустимой по сцеплению ведущих колес скорости непрямолинейного движения, отличающийся тем, что с целью повышения курсовой устойчивости и улучшения управляемости легкового автомобиля с задним или с передним приводом (4к2), повышения безопасности движения, а также уменьшения поперечного габарита МКДМ коронные шестерни планетарных механизмов закреплены на центрально расположенном трубчатом вале, который приводится шестеренной цилиндрической парой от ведомого вала главной передачи - конической при заднем приводе, и цилиндрической при переднем, а их солнечные шестерни кинематически связаны посредством двух цилиндрических шестеренных пар, ведущие шестерни которых закреплены на наружных концах двух соосных валов, и установленных на внутренних концах этих валов двух ведомых конических шестерен с общей ведущей конической шестерней, которая связана с валом указанной выше гидромашины, входная и выходная рабочие полости которой соединены с выходами трехпозиционного с "закрытым центром" золотника управления реверсом гидромашины и посредством двух выпускных обратных клапанов - с входом трехпозиционного с "открытым центром" золотника управления режимами работы гидромашины, в нейтральном положении которых выходная и входная ее рабочие полости вне зависимости от направления вращения гидромашины посредством двух выпускных и двух впускных клапанов соединены со сливной магистралью, обеспечивая разблокировку МКДМ, а во включенных положениях золотник с "открытым центром" соединяет выходную полость гидромашины либо с входом электроуправляемого переливного клапана, обеспечивая работу гидромашины в режиме гидронасоса при фиксированной настройке давления на входе клапана для блокировки МКДМ в случае углового отклонения δθ управляемых колес, меньшего ±0.06°, соответствующего прямолинейному движению или в случае их большего углового отклонения и поворота автомобиля - в режиме гидронасоса при регулируемом САУ давлении на входе клапана и соответствующей отрицательной разности крутящих моментов наружного и внутреннего ведущих колес, либо через выпускной обратный клапан со сливной магистралью, а ее входную рабочую полость - с выходом электроуправляемого редукционного клапана в нагнетательной магистрали гидроаккумулятора при рабочем положении золотника с "закрытым центром", соответствующем направлению поворота автомобиля, обеспечивая работу гидромашины в режиме гидромотора при регулируемом САУ давлении на выходе редукционного клапана и соответствующей либо положительной, либо отрицательной указанной разности крутящих моментов в зависимости от характера поворачиваемости автомобиля, при этом САУ выполняет функцию автоматического регулятора, обеспечивая поддержание заданной величины указанного выше безразмерного регулируемого параметра kп0=0.9, соответствующей небольшой недостаточной поворачиваемости автомобиля, текущие значения которого определяются в вычислительном блоке как отношение произведения квадрата измеряемой угловой скорости поворота автомобиля и длины его колесной базы к произведению расчетных значений поперечного ускорения jyp, равного сумме поперечной составляющей j0y центростремительного ускорения центра масс автомобиля и постоянной величины δj0=0.001g, и абсолютной величины угла поворота управляемых колес, равной  где при равенстве единице дискретный параметр Sθ фиксирует начало поворота автомобиля, а его отрицание (-Sθ) - прямолинейное движение.
где при равенстве единице дискретный параметр Sθ фиксирует начало поворота автомобиля, а его отрицание (-Sθ) - прямолинейное движение.
2. Регулируемый межколесный дифференциальный механизм по п. 1, отличающийся тем, что в вычислительном блоке определяются: при равенстве (-Sθ)=1 - аналоговая величина δр фиксированной настройки давления на входе переливного клапана, обеспечивающей предельный по сцеплению момент сопротивления повороту автомобиля при блокировке МКДМ, а при равенстве Sθ=1 - аналоговая величина разности Δk0=(kп0-kп) заданной и текущей величины регулируемого параметра при разблокированном МКДМ, являющаяся начальным значением ошибки регулирования, знак которой отрицательный либо положительный фиксируется в двух соответствующих однополярных релейных звеньях с областью нечувствительности, например, δk0=±0.05, дискретными параметрами SΔk1 и SΔk2, и равенство одного из них единице или  определяет режим работы гидромашины, либо гидронасоса при SΔk1=1, либо гидромотора при SΔk2=1 и начало функционирования МКДМ в регулируемом режиме при исполнении САУ функции автоматического регулятора, признаком которого в обоих случаях является наличие перепада давления Δр между выходом и входом гидромашины, превышающего величину потерь давления Δр0 на механическое трение и циркуляцию рабочей жидкости при холостом вращении гидромашины, фиксируемого равенством дискретного параметра Sp=1, вне зависимости от режима работы гидромашины, от знака начальной Δk0 и текущей Δk величины ошибки регулирования и величины дискретных параметров SΔk1 и SΔk2, и на основе вышеуказанных дискретных параметров и текущей величины ошибки регулирования Δk в электронном блоке САУ формируются аналоговые сигналы управления переливным клапаном, обеспечивающие работу гидромашины в режиме гидронасоса либо в режиме блокировки МКДМ при прямолинейном движении - uг1=K3 * (-Sθ) * δр, либо в регулируемом режиме МКДМ при повороте автомобиля -
определяет режим работы гидромашины, либо гидронасоса при SΔk1=1, либо гидромотора при SΔk2=1 и начало функционирования МКДМ в регулируемом режиме при исполнении САУ функции автоматического регулятора, признаком которого в обоих случаях является наличие перепада давления Δр между выходом и входом гидромашины, превышающего величину потерь давления Δр0 на механическое трение и циркуляцию рабочей жидкости при холостом вращении гидромашины, фиксируемого равенством дискретного параметра Sp=1, вне зависимости от режима работы гидромашины, от знака начальной Δk0 и текущей Δk величины ошибки регулирования и величины дискретных параметров SΔk1 и SΔk2, и на основе вышеуказанных дискретных параметров и текущей величины ошибки регулирования Δk в электронном блоке САУ формируются аналоговые сигналы управления переливным клапаном, обеспечивающие работу гидромашины в режиме гидронасоса либо в режиме блокировки МКДМ при прямолинейном движении - uг1=K3 * (-Sθ) * δр, либо в регулируемом режиме МКДМ при повороте автомобиля -  в случае его избыточной относительно заданного уровня поворачиваемости, а также аналоговые сигналы управления редукционным клапаном, обеспечивающие работу гидромашины в режиме гидромотора при недостаточной поворачиваемости -
в случае его избыточной относительно заданного уровня поворачиваемости, а также аналоговые сигналы управления редукционным клапаном, обеспечивающие работу гидромашины в режиме гидромотора при недостаточной поворачиваемости -  и при чрезмерной избыточной поворачиваемости -
и при чрезмерной избыточной поворачиваемости -  причем в формулы uг1 и uг2 применительно к случаям избыточной поворачиваемости включен корректирующий множитель (-1) для устранения несоответствия отрицательного знака ошибки регулирования Δk и положительного знака соответствующего изменения регулирующего параметра - либо давления на входе переливного, либо давления на выходе редукционного клапана
причем в формулы uг1 и uг2 применительно к случаям избыточной поворачиваемости включен корректирующий множитель (-1) для устранения несоответствия отрицательного знака ошибки регулирования Δk и положительного знака соответствующего изменения регулирующего параметра - либо давления на входе переливного, либо давления на выходе редукционного клапана
3. Регулируемый межколесный дифференциальный механизм по пп. 1 и 2, отличающийся тем, что переключение режимов работы МКДМ осуществляется двумя ручными кнопками панели управления, цифровые сигналы включения которых u01 и u02 при независимой от характера движения автомобиля разблокировке МКДМ равны нулю, а при включении любой из них - u01=1 или u02=1 и при условии отсутствия торможения или движения автомобиля задним ходом, соответствующего отрицанию дискретного параметра (Sz)=1, в соответствии с цифровой командой  , сформированной в электронном блоке, обеспечивается включение постоянно разомкнутого реле РЭ0, управляющего электропитанием "пропорциональных" соленоидов переливного и редукционного клапанов и соленоидов золотников гидравлической системы, u0=1, что позволяет задействовать сформированные в электронном блоке цифровые команды управления указанными выше золотниками посредством включения соответствующих постоянноразомкнутых реле, в случае прямолинейного движения для включения режима блокировки МКДМ при u01=1 - цифровую команду u4=(-Sθ) переключения золотника с "открытым центром" для перевода работы гидромашины в режим гидронасоса, а в случае поворота автомобиля для включения регулируемого режима МКДМ при u02=1 - цифровые команды u4 или u3 переключения указанным золотником работы гидромашины либо в режим гидронасоса, либо в режим гидромотора, определяемых логическими формулами:
, сформированной в электронном блоке, обеспечивается включение постоянно разомкнутого реле РЭ0, управляющего электропитанием "пропорциональных" соленоидов переливного и редукционного клапанов и соленоидов золотников гидравлической системы, u0=1, что позволяет задействовать сформированные в электронном блоке цифровые команды управления указанными выше золотниками посредством включения соответствующих постоянноразомкнутых реле, в случае прямолинейного движения для включения режима блокировки МКДМ при u01=1 - цифровую команду u4=(-Sθ) переключения золотника с "открытым центром" для перевода работы гидромашины в режим гидронасоса, а в случае поворота автомобиля для включения регулируемого режима МКДМ при u02=1 - цифровые команды u4 или u3 переключения указанным золотником работы гидромашины либо в режим гидронасоса, либо в режим гидромотора, определяемых логическими формулами:  при избыточной,
при избыточной,  при недостаточной и
при недостаточной и  при чрезмерной избыточной поворачиваемости автомобиля, и в случае равенства u3=1, дополняемой цифровыми командами u1 либо u2 переключения трехпозиционного золотника с "закрытым центром", задающего направление вращения гидромашины, определяемыми логическими формулами
при чрезмерной избыточной поворачиваемости автомобиля, и в случае равенства u3=1, дополняемой цифровыми командами u1 либо u2 переключения трехпозиционного золотника с "закрытым центром", задающего направление вращения гидромашины, определяемыми логическими формулами  и
и  , в которых первые слагаемые соответствуют недостаточной, вторые слагаемые - чрезмерной избыточной поворачиваемости автомобиля, а дискретный параметр Skθ определяет направление поворота управляемых колес и при равенстве единице соответствует, например, их повороту вправо.
, в которых первые слагаемые соответствуют недостаточной, вторые слагаемые - чрезмерной избыточной поворачиваемости автомобиля, а дискретный параметр Skθ определяет направление поворота управляемых колес и при равенстве единице соответствует, например, их повороту вправо.
4. Регулируемый межколесный дифференциальный механизм по пп. 1, 2 и 3, отличающийся тем, что панель управления содержит: световые сигнальные индикаторы зеленого цвета, информирующие о функционировании МКДМ в каждом из задаваемых двумя кнопками режимах, цифровые команды включения которых определяются в электронном блоке САУ: в режиме разблокировки -  - логической формулой, соответствующей либо выключенным кнопкам управления, либо движению автомобиля задним ходом, либо его торможению, в режиме блокировки -
- логической формулой, соответствующей либо выключенным кнопкам управления, либо движению автомобиля задним ходом, либо его торможению, в режиме блокировки -  , где дискретный сигнал Sδp, равный единице, соответствует выполненной фиксированной настройке давления на входе переливного клапана, в регулируемом режиме -
, где дискретный сигнал Sδp, равный единице, соответствует выполненной фиксированной настройке давления на входе переливного клапана, в регулируемом режиме -  где (-SΔk) - отрицание дискретного параметр, фиксирующее снижение ошибки регулирования Δk ниже заданного уровня δk0, равного, например, ±0.05, вне зависимости от режима работы гидромашины; световые сигнальные индикаторы красного цвета, включаемые для предупреждения водителя при неблагоприятных погодных и дорожных условиях непрямолинейного движения автомобиля: цифровой командой
где (-SΔk) - отрицание дискретного параметр, фиксирующее снижение ошибки регулирования Δk ниже заданного уровня δk0, равного, например, ±0.05, вне зависимости от режима работы гидромашины; световые сигнальные индикаторы красного цвета, включаемые для предупреждения водителя при неблагоприятных погодных и дорожных условиях непрямолинейного движения автомобиля: цифровой командой  в случае разблокированного МКДМ о необходимости включения регулируемого режима МКДМ при условии изменения разности заданной и фактической величины - kп за пределы диапазона (-Δk01)<(kп0-kп)≤Δk02 заданных граничных (-Δk01)=(-0.1) и Δk02=0.3 значений, соответствующих допустимой при пониженной скорости движения автомобиля величине показателя kп статической поворачиваемости, цифровой командой
в случае разблокированного МКДМ о необходимости включения регулируемого режима МКДМ при условии изменения разности заданной и фактической величины - kп за пределы диапазона (-Δk01)<(kп0-kп)≤Δk02 заданных граничных (-Δk01)=(-0.1) и Δk02=0.3 значений, соответствующих допустимой при пониженной скорости движения автомобиля величине показателя kп статической поворачиваемости, цифровой командой  о необходимости при регулируемом режиме МКДМ снизить скорость непрямолинейного движения, где Sε - дискретный параметр - результат преобразования аналоговой величины ε - производной по времени от соотношения относительной величины фактической и "теоретической" (без учета скоростных потерь) разности частоты вращения ведущих колес по отношению к средней частоте их вращения и разности давления в нагнетательной и в сливной магистралях гидромашины, определяемый в однополярном релейном звене с областью нечувствительности δε и при ε≥δε, фиксирующий начало скольжения более нагруженного ведущего колеса.
о необходимости при регулируемом режиме МКДМ снизить скорость непрямолинейного движения, где Sε - дискретный параметр - результат преобразования аналоговой величины ε - производной по времени от соотношения относительной величины фактической и "теоретической" (без учета скоростных потерь) разности частоты вращения ведущих колес по отношению к средней частоте их вращения и разности давления в нагнетательной и в сливной магистралях гидромашины, определяемый в однополярном релейном звене с областью нечувствительности δε и при ε≥δε, фиксирующий начало скольжения более нагруженного ведущего колеса.
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Лапка к прошивной машине для прошивки подошвы с закрытым риссом | 1939 |
|
SU56279A1 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| CN 207316018 U, 04.05.2018. | |||

