Область техники
Настоящее изобретение относится к устройству для рулевого управления транспортного средства (или устройству управления для устройства рулевого управления с усилителем) для управления устройством рулевого управления с усилителем транспортного средства.
Уровень техники
Транспортное средство, такое как автомобиль, использует устройство рулевого управления с электроусилителем, которое прикладывает вспомогательный крутящий момент рулевого управления к механизму рулевого управления, в том числе к передним колесам, посредством возбуждения электродвигателя в соответствии с крутящим моментом рулевого управления, прикладываемым водителем (или человеком в транспортном средстве), управляющим рулевым колесом. В таком устройстве рулевого управления с электроусилителем, которое раскрыто в патентных документах 1-3, существует технология, в которой вспомогательный крутящий момент рулевого управления регулируется, когда этого требуют обстоятельства, принимая во внимание скорость поворота транспортного средства вокруг вертикальной оси. Более того, как раскрыто в патентном документе 4, фазовая компенсация (т.е. регулировка затухания) выполняется по целевому значению базового вспомогательного тока, который прилагается к электродвигателю в соответствии с примененным вспомогательным крутящим моментом рулевого управления. Посредством этой структуры компонент затухания может быть учтен, давая в результате улучшение в стабилизации руления.
Патентный документ 1: Японская выложенная патентная заявка № 2005-193779
Патентный документ 2: Японская выложенная патентная заявка № 2006-131064
Патентный документ 3: Японская выложенная патентная заявка № 2006-160180
Патентный документ 4: Японская выложенная патентная заявка № 2004-203112
Проблема, на решение которой направлено изобретение
Для того чтобы улучшать способность к стабилизации транспортного средства, как описано выше, существует возможная мера увеличения вышеупомянутой регулировки затухания. Однако, если регулировка затухания усиливается, "чувство руля" у водителя, который управляет транспортным средством, ухудшается. Более конкретно, она дает ощущение тяжести на рулевом колесе и дает такое ощущение, что транспортное средство не поворачивает так, как хочет водитель. С другой стороны, если регулировка затухания уменьшается, вибрации в рулевом управлении и колебания угла поворота транспортного средства вокруг вертикальной оси взаимно влияют друг на друга в зависимости от характеристик транспортного средства (или конструкции или т.п.), что может ухудшать способность к стабилизации транспортного средства в целом. Т.е. фаза вибрации в рулевом управлении и фаза колебания угла поворота вокруг вертикальной оси транспортного средства находятся в соотношении противоположных фаз, что, вероятно, увеличивает вибрацию, действующую на транспортное средство в целом. Кроме того, в любой конфигурации, учитывающей вышеупомянутую скорость поворота вокруг вертикальной оси, технические проблемы не решаются, так как взаимная связь между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства вокруг вертикальной оси не рассматривается.
Следовательно, ввиду приведенных выше в пример проблем, задачей настоящего изобретения является создание устройства для рулевого управления транспортного средства, которое может улучшать способность к стабилизации транспортного средства, в то же время улучшая способность к стабилизации рулевого управления.
Средство решения проблемы
Вышеупомянутая задача может быть решена с помощью настоящего изобретения посредством создания устройства для рулевого управления транспортного средства, снабженного первым вычислительным устройством для вычисления основного вспомогательного усилия в рулевом управлении, чтобы помогать работе рулевого управления на основе угла поворота рулевого колеса и/или крутящего момента рулевого управления, соответствующего операции руления человеком в транспортном средстве; получающим устройством для получения поперечной силы на каждом из передних колес и задних колес; вторым вычислительным устройством для вычисления как первого корректирующего усилия в рулевом управлении, которое уменьшает основное вспомогательное усилие в рулевом управлении, на основе поперечной силы на задних колесах, так и для вычисления второго корректирующего усилия в рулевом управлении, которое увеличивает основное вспомогательное усилие в рулевом управлении, на основе поперечной силы на передних колесах; и устройством приложения усилия в рулевом управлении для приложения, к транспортному средству, целевого вспомогательного усилия в рулевом управлении, полученного сложением первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении с основным вспомогательным усилием в рулевом управлении.
Согласно устройству рулевого управления транспортного средства настоящего изобретения посредством работы устройства приложения усилия в рулевом управлении, включающего в себя электродвигатель или т.п., основное вспомогательное усилие в рулевом управлении, вычисленное первым вычислительным устройством, прикладывается к механизму рулевого управления. Основное вспомогательное усилие в рулевом управлении обычно является усилием в рулевом управлении, вычисленным на основе крутящего момента рулевого управления или угла поворота рулевого колеса, обнаруженного во время выполнения руления человеком в транспортном средстве (т.е. усилие в рулевом управлении, которое является основой для помощи при рулении). Это помогает выполнению руления человеком в транспортном средстве. Другими словами, работа так называемого рулевого управления с электроусилением (EPS) регулируется.
В настоящем изобретении, в частности, посредством работы получающего устройства получается поперечная сила на каждом из передних колес и задних колес транспортного средства. Здесь, типично, поперечная сила на каждом из передних колес и задних колес получается посредством дискретизации величины поперечной силы на каждом из передних колес и задних колес с соответствующим периодом. В данном случае термин "передние колеса" настоящего изобретения указывает колеса, расположенные соответственно на передней стороне относительно направления движения транспортного средства, а термин "задние колеса" настоящего изобретения указывает колеса, расположенные соответственно на задней стороне относительно направления движения транспортного средства. Типично, передними колесами являются колеса, управляемые или поворачиваемые посредством приложения к ним вспомогательного усилия в рулевом управлении; однако, задние колеса могут быть управляемыми или поворачиваемыми колесами.
Затем, посредством работы второго вычислительного устройства первое корректирующее усилие в рулевом управлении вычисляется на основе поперечной силы на задних колесах, полученной получающим устройством (например, пропорциональная величина поперечной силы на задних колесах и дифференциальная величина поперечной силы на задних колесах, как подробно описано позже). Тем же образом, посредством работы второго вычислительного устройства второе корректирующее усилие в рулевом управлении вычисляется на основе поперечной силы на передних колесах, полученной получающим устройством (например, пропорциональная величина поперечной силы на передних колесах, как подробно описано позже). Первое корректирующее усилие в рулевом управлении является усилием в рулевом управлении, которое главным образом действует, чтобы уменьшать основное вспомогательное усилие в рулевом управлении, вычисленное первым вычислительным устройством. В частности, как подробно описано далее, первое корректирующее усилие в рулевом управлении предпочтительно является усилием в рулевом управлении, которое главным образом действует, чтобы направлять или поворачивать управляемые колеса в направлении сходимости колебания угла поворота вокруг вертикальной оси транспортного средства, например, если транспортное средство находится в состоянии прохождения поворота (особенно, если транспортное средство находится в переходном или состоянии прохождения небольшого поворота). С другой стороны, второе корректирующее усилие в рулевом управлении является усилием в рулевом управлении, которое главным образом действует, чтобы увеличивать основное вспомогательное усилие в рулевом управлении, вычисленное первым вычислительным устройством. В частности, как подробно описано позже, например, если транспортное средство находится в состоянии прохождения поворота (особенно, в состоянии прохождения плавного поворота), второе корректирующее усилие в рулевом управлении предпочтительно является усилием в рулевом управлении, которое, главным образом, действует, чтобы увеличивать основное вспомогательное усилие в рулевом управлении, чтобы компенсировать уменьшение в основном вспомогательном усилии в рулевом управлении посредством первого корректирующего усилия в рулевом управлении. Затем, посредством работы устройства приложения усилия в рулевом управлении целевое вспомогательное усилие в рулевом управлении, полученное добавлением каждого из первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении к основному вспомогательному усилию в рулевом управлении, прикладывается к механизму рулевого управления. Другими словами, после того, как корректировка или регулировка на основе первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении выполняется по основному вспомогательному усилию в рулевом управлении, скорректированное или отрегулированное основное вспомогательное усилие в рулевом управлении (т.е. целевое вспомогательное усилие в рулевом управлении) фактически прикладывается к механизму рулевого управления.
Как описано выше, согласно настоящему изобретению применяется целевое вспомогательное усилие в рулевом управлении, полученное сложением первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении с основным вспомогательным усилием в рулевом управлении. Таким образом, возможно предпочтительно предотвращать взаимное влияние или резонанс между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства вокруг вертикальной оси, в частности, посредством добавления первого корректирующего усилия в рулевом управлении, которое уменьшает основное вспомогательное усилие в рулевом управлении, к основному вспомогательному усилию в рулевом управлении. Другими словами, как описано выше, простое приложение основного вспомогательного усилия в рулевом управлении, вычисленного в соответствии с крутящим моментом рулевого управления и углом поворота рулевого колеса, вероятно будет причиной колебания угла поворота вокруг вертикальной оси в транспортном средстве, особенно в промежуточном или состоянии прохождения небольшого поворота; однако, настоящее изобретение может предпочтительно предотвращать такой недостаток. Следовательно, оно может предпочтительно сводить в одну точку вибрацию в передних колесах, получая в результате улучшенную способность к стабилизации транспортного средства. Кроме того, в настоящем изобретении, взаимное влияние или резонанс между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства вокруг вертикальной оси предпочтительно предотвращаются первым корректирующим усилием в рулевом управлении и вторым корректирующим усилием в рулевом управлении без избыточно увеличивающейся степени регулировки затухания. Следовательно, возможно предпочтительно предотвращать недостаток в том, что "ощущение руля" становится плохим из-за избыточно увеличенной степени регулировки затухания. Другими словами, согласно настоящему изобретению, способность к стабилизации рулевого управления может быть также улучшена, одновременно улучшая способность к стабилизации транспортного средства, как описано выше.
С другой стороны, например, если транспортное средство находится в состоянии прохождения плавного поворота, взаимное влияние или резонанс между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства вокруг вертикальной оси возникают с меньшей вероятностью, так как транспортное средство имеет устойчивое поведение. С одной стороны, первое корректирующее усилие в рулевом управлении для предотвращения взаимного влияния или резонанса между вибрацией в рулевом управлении и углом поворота транспортного средства вокруг вертикальной оси (другими словами, первое корректирующее усилие в рулевом управлении для уменьшения основного вспомогательного усилия в рулевом управлении) добавляется, даже если транспортное средство находится в состоянии прохождения плавного поворота. Таким образом, если акцент ставится только на предотвращение взаимного влияния или резонанса между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства вокруг вертикальной оси посредством простого добавления первого корректирующего усилия в рулевом управлении, человек в транспортном средстве вероятно признает, что руль ощущается тяжелым, например, когда транспортное средство находится в состоянии прохождения плавного поворота. Согласно настоящему изобретению применяется целевое вспомогательное усилие в рулевом управлении, полученное добавлением первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении (т.е., в частности, второго корректирующего усилия в рулевом управлении, которое увеличивает основное вспомогательное усилие в рулевом управлении) к основному вспомогательному усилию в рулевом управлении. Таким образом, можно предпочтительно предотвращать уменьшение целевого вспомогательного усилия в рулевом управлении, прикладываемого так, чтобы помогать при рулении, например, если транспортное средство находится в состоянии прохождения плавного поворота. Следовательно, это почти не дает возможности человеку в транспортном средстве ощущать дискомфорт при рулении, например, даже если транспортное средство находится в состоянии прохождения плавного поворота.
Как описано выше, согласно настоящему изобретению возможно предпочтительно компенсировать нехватку усилия в рулевом управлении, что легко случается, в частности, в состоянии прохождения плавного поворота, в то же время предпочтительно предотвращая взаимное влияние или резонанс между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства вокруг вертикальной оси, которые легко возникают, в частности, в состоянии быстрого поворота (другими словами, в то же время, улучшая способность к стабилизации транспортного средства и способность к стабилизации рулевого управления).
В одном аспекте устройства управления рулевого управления транспортного средства настоящего изобретения второе вычислительное устройство вычисляет как первое корректирующее усилие в рулевом управлении, так и второе корректирующее усилие в рулевом управлении, так что сумма первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении равна практически нулю, когда транспортное средство выполняет плавный поворот.
Согласно этому аспекту, уменьшение в основном вспомогательном усилии в рулевом управлении посредством первого корректирующего усилия в рулевом управлении может быть отменено путем увеличения основного вспомогательного усилия в рулевом управлении посредством второго корректирующего усилия в рулевом управлении. Это может предпочтительно предотвращать уменьшение целевого вспомогательного усилия в рулевом управлении, прикладываемого так, чтобы помогать при рулении, например, если транспортное средство находится в состоянии прохождения плавного поворота. Другими словами, человек в транспортном средстве может выполнять руление с тем же ощущением, что и в случае, где рулению помогает основное вспомогательное усилие в рулевом управлении.
В данном случае, термин "практически равно нулю" в настоящем изобретении широко включает в себя случай, где сумма точно равна нулю так же, как и случай, где сумма считается, по существу, нулевой, принимая во внимание "чувство руля", передаваемое человеку в транспортном средстве. Обычно, любая ситуация, в которой первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении отменяют друг друга при условии, что рулевое управление осуществляется с тем же ощущением, что и в случае, где рулению помогает основное вспомогательное усилие в рулевом управлении, может быть включена в диапазон "практически равный нулю" в настоящем изобретении.
В другом аспекте устройства управления рулевого управления транспортного средства настоящего изобретения второе вычислительное устройство вычисляет третье корректирующее усилие в рулевом управлении, которое уменьшает основное вспомогательное усилие в рулевом управлении на основе пропорциональной величины поперечной силы на задних колесах; вычисляет четвертое корректирующее усилие в рулевом управлении, которое уменьшает основное вспомогательное усилие в рулевом управлении на основе дифференциальной величины поперечной силы на задних колесах; и вычисляет сумму вычисленных третьего корректирующего усилия в рулевом управлении и четвертого корректирующего усилия в рулевом управлении как первое корректирующее усилие в рулевом управлении.
Согласно этому аспекту, благодаря первому корректирующему усилию в рулевом управлении, которое равно сумме третьего корректирующего усилия в рулевом управлении и четвертого корректирующего усилия в рулевом управлении, можно улучшать способность к стабилизации рулевого управления, в то же время улучшая способность к стабилизации транспортного средства, как описано выше.
В аспекте устройства рулевого управления транспортного средства, в котором сумма третьего корректирующего усилия в рулевом управлении и четвертого корректирующего усилия в рулевом управлении вычисляется как первое корректирующее усилие в рулевом управлении, как описано выше, второе вычислительное устройство может вычислять как третье корректирующее усилие в рулевом управлении, так и второе корректирующее усилие в рулевом управлении; так что сумма третьего корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении практически равна нулю, когда транспортное средство выполняет плавный поворот.
Так как транспортное средство имеет устойчивое поведение (другими словами, характер поведения транспортного средства имеет малое изменение или имеет небольшое изменение) при плавном повороте, дифференциальная величина поперечной силы на задних колесах считается небольшой величиной по сравнению с пропорциональной величиной поперечной силы на задних колесах. Другими словами, если транспортное средство имеет устойчивое поведение, дифференциальная величина поперечной силы на задних колесах не должна рассматриваться вообще, или почти не должна рассматриваться, по сравнению с пропорциональной величиной поперечной силы на задних колесах. Таким образом, четвертое корректирующее усилие в рулевом управлении, вычисленное на основе дифференциальной величины поперечной силы на задних колесах, не должно рассматриваться совсем или почти не должно рассматриваться по сравнению с третьим корректирующим усилием в рулевом управлении, вычисленным на основе пропорциональной величины поперечной силы на задних колесах. Следовательно, благодаря такой конструкции уменьшение основного вспомогательного усилия в рулевом управлении посредством первого корректирующего усилия в рулевом управлении (которое, по существу, равняется третьему корректирующему усилию в рулевом управлении при плавном повороте) может быть отменено посредством увеличения в основном вспомогательном усилии в рулевом управлении посредством второго корректирующего усилия в рулевом управлении. Это может предпочтительно предотвращать уменьшение целевого вспомогательного усилия в рулевом управлении, прикладываемого так, чтобы помогать усилию в рулевом управлении, например, если транспортное средство находится в состоянии прохождения плавного поворота.
В другом аспекте устройства рулевого управления транспортного средства настоящего изобретения оно дополнительно снабжено устройством определения для определения скорости транспортного средства и угла поворота рулевого колеса, получающим устройством, которое получает поперечную силу на каждом из передних колес и задних колес, оценивая поперечную силу на каждом из передних колес и задних колес на основе каждого параметра из скорости поворота вокруг вертикальной оси и угла увода, оцененных на основе скорости транспортного средства и угла поворота рулевого колеса, обнаруженных устройством определения.
Согласно этому аспекту, вместо непосредственного определения поперечной силы на каждом из передних колес и задних колес возможно оценивать поперечную силу на каждом из передних колес и задних колес. Другими словами, вместо так называемого управления с обратной связью, при котором первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении вычисляются после того, как поперечная сила на каждом из передних колес и задних колес фактически определена, можно выполнять так называемое опережающее управление, при котором первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении вычисляются после того, как поперечная сила на каждом из передних колес и задних колес оценена. В целом, существует постоянная задержка между моментом фактического определения поперечной силы на каждом из передних колес и задних колес и моментом, когда применяется целевое вспомогательное усилие в рулевом управлении, учитывая первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении, вычисленные на основе обнаруженной поперечной силы. Следовательно, когда целевое вспомогательное усилие в рулевом управлении применяется, поперечная сила на каждом из передних колес и задних колес с большой долей вероятности изменяется, что вероятно вызывает дискомфорт при рулении. Согласно этому аспекту, поперечная сила на каждом из передних колес и задних колес может быть оценена заранее, так что возможно корректно не допускать недостатка в том, что задержка управления с обратной связью вызывает дискомфорт при рулении.
Даже если первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении вычисляются после того, как поперечная сила на каждом из передних колес и задних колес оценена, вероятно существует определенная степень задержки из-за времени, требуемого для операции оценки и операции вычисления. Следовательно, даже если выполняется опережающее управление (и, более того, даже если выполняется управление с обратной связью), предпочтительно дополнительно осуществлять компенсацию задержки, как описано позже.
В другом аспекте устройства рулевого управления транспортного средства настоящего изобретения второе вычислительное устройство соответственно вычисляет первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении на основе результата умножения между поперечной силой на задних колесах и первым корректирующим коэффициентом, вычисленным на основе модели движения транспортного средства в плоскостном или горизонтальном направлении, и результата умножения между поперечной силой на передних колесах и вторым корректирующим коэффициентом, вычисленным на основе модели движения транспортного средства в плоскостном или горизонтальном направлении.
Согласно этому аспекту первое корректирующее усилие в рулевом управлении вычисляется на основе результата умножения первого корректирующего коэффициента и поперечной силы на задних колесах. Тем же образом второе корректирующее усилие в рулевом управлении вычисляется на основе результата умножения второго корректирующего коэффициента и поперечной силы на передних колесах. В частности, первый корректирующий коэффициент и второй корректирующий коэффициент вычисляются на основе модели движения транспортного средства, так что можно вычислять каждое из первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении относительно легко и очень точно.
В данном случае, первый корректирующий коэффициент и второй корректирующий коэффициент вычисляются на основе модели движения транспортного средства в плоскостном или горизонтальном направлении. В частности, первый корректирующий коэффициент и второй корректирующий коэффициент предпочтительно получаются решением уравнения на основе модели движения (т.е. уравнения движения для транспортного средства), в то же время учитывая, что каждое из (i) предотвращения взаимного влияния или резонанса между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства вокруг вертикальной оси и (ii) предотвращения уменьшения целевого вспомогательного усилия в рулевом управлении в состоянии прохождения плавного поворота должно быть достигнуто, как описано выше.
Более того, если сумма третьего корректирующего усилия в рулевом управлении и четвертого корректирующего усилия в рулевом управлении вычисляется как первое корректирующее усилие в рулевом управлении, первый корректирующий коэффициент предпочтительно формируется как из третьего корректирующего коэффициента, на который умножается пропорциональная величина поперечной силы на задних колесах, так и из четвертого корректирующего коэффициента, на который умножается дифференциальная величина поперечной силы на задних колесах. В этом случае третье корректирующее усилие в рулевом управлении вычисляется на основе результата умножения третьего корректирующего коэффициента и пропорциональной величины поперечной силы на задних колесах. Тем же образом, четвертое корректирующее усилие в рулевом управлении вычисляется на основе результата умножения четвертого корректирующего коэффициента и дифференциальной величины поперечной силы на задних колесах.
В аспекте устройства рулевого управления транспортного средства, в котором первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении вычисляются на основе результата умножения первого корректирующего коэффициента или второго корректирующего коэффициента и поперечной силы на передних колесах или поперечной силы на задних колесах, первый корректирующий коэффициент и второй корректирующий коэффициент могут иметь зависимость от скорости транспортного средства, и второе вычислительное устройство может вычислять каждое из первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении, используя полученный коэффициент, умножая первый корректирующий коэффициент и второй корректирующий коэффициент, когда скорость транспортного средства является предварительно определенной скоростью, на коэффициент скорости, установленный на основе каждой из фактической скорости транспортного средства и зависимости от скорости транспортного средства первого корректирующего коэффициента и второго корректирующего коэффициента.
Благодаря такой конструкции, каждое из первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении может быть вычислено относительно легко с помощью зависимости от скорости транспортного средства первого корректирующего коэффициента и второго корректирующего коэффициента. В частности, если каждый из первого корректирующего коэффициента и второго корректирующего коэффициента сохраняется, например, в памяти или т.п. заранее, когда скорость транспортного средства является предварительно определенной скоростью, операция вычисления корректирующих коэффициентов может быть дополнительно упрощена. Следовательно, возможно значительно упрощать операцию вычисления первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении.
В дополнительном аспекте устройства рулевого управления транспортного средства настоящего изобретения второе вычислительное устройство осуществляет компенсацию задержки, принимая во внимание время, требуемое до тех пор, пока первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении не будет вычислено, по первому корректирующему усилию в рулевом управлении и второму корректирующему усилию в рулевом управлении, а устройство приложения усилия в рулевом управлении прикладывает полученное целевое вспомогательное усилие в рулевом управлении, добавляя и первое корректирующее усилие в рулевом управлении, и второе корректирующее усилие в рулевом управлении, по которым осуществляется компенсация задержки, к основному вспомогательному усилию в рулевом управлении.
В целом, фиксированный интервал времени требуется от момента времени, когда операция вычисления первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении начинается, до момента времени, когда целевое вспомогательное усилие в рулевом управлении, принимающее во внимание первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении, применяется. Поскольку поведение транспортного средства, когда применяется целевое вспомогательное усилие в рулевом управлении, вероятно изменяется по сравнению с поведением транспортного средства, когда начинается операция вычисления, это вероятно вызывает дискомфорт при рулении. Согласно этому аспекту осуществляется компенсация задержки, принимая во внимание время, требуемое, чтобы вычислять первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении, так что возможно корректно не допускать недостатка в том, что задержка вызывает дискомфорт при рулении.
Работа и другие преимущества настоящего изобретения станут более очевидными из варианта осуществления, поясненного ниже.
Краткое описание чертежей
Фиг.1 - схематический структурный вид, концептуально показывающий основную структуру варианта осуществления устройства управления рулевого управления транспортного средства настоящего изобретения.
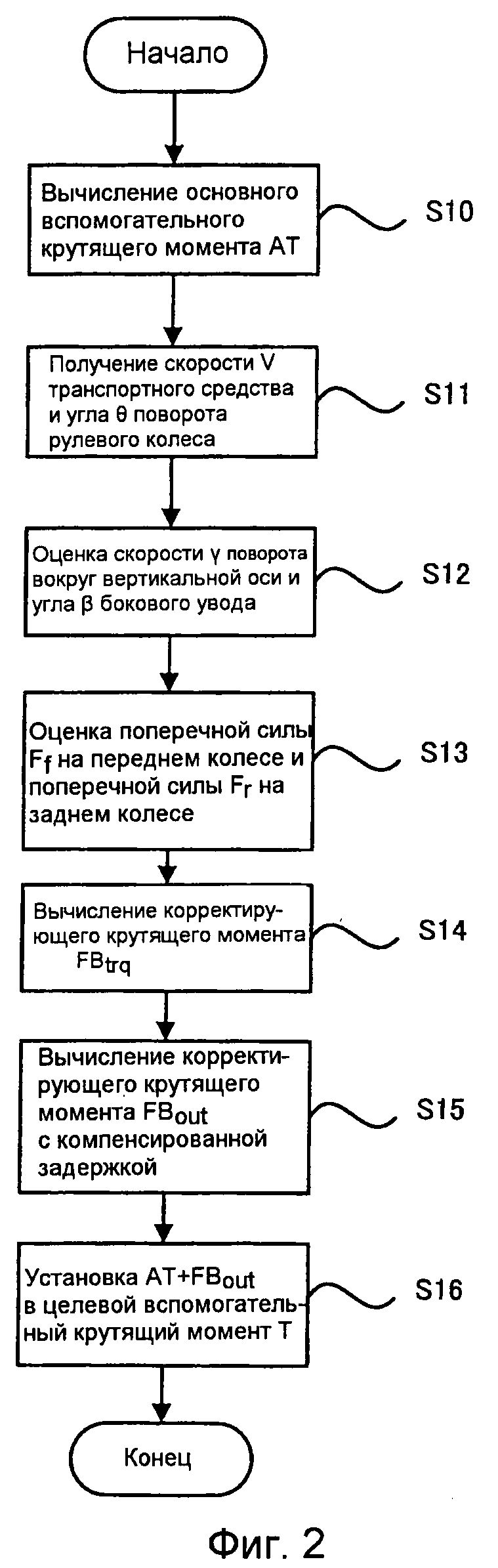
Фиг.2 - блок-схема последовательности операций, концептуально показывающая всю работу устройства рулевого управления с электроусилителем.
Фиг.3 - график, показывающий основной вспомогательный крутящий момент.
Фиг.4 - график, показывающий корреляцию коэффициента, на который поперечная сила на передних колесах умножается, когда вычисляется корректирующий крутящий момент, относительно скорости транспортного средства.
Фиг.5 - график, показывающий корреляцию коэффициента, на который пропорциональная величина поперечной силы на задних колесах умножается, когда вычисляется корректирующий крутящий момент, относительно скорости транспортного средства.
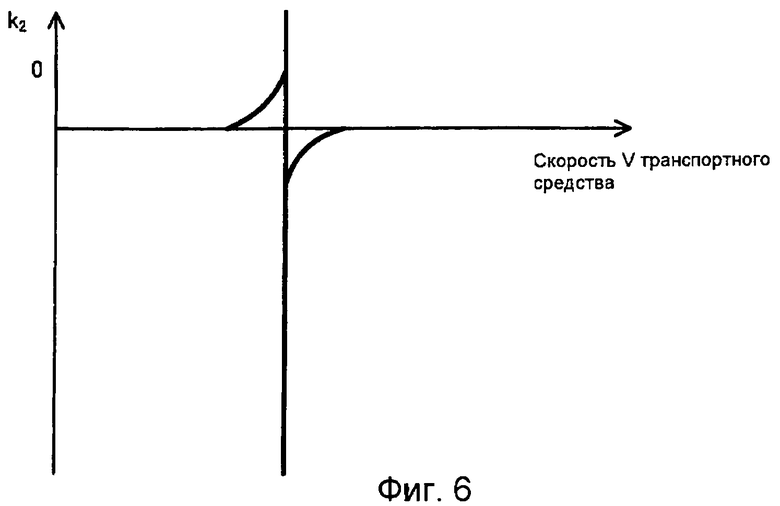
Фиг.6 - график, показывающий корреляцию коэффициента, на который дифференциальная величина поперечной силы на задних колесах умножается, когда вычисляется корректирующий крутящий момент, относительно скорости транспортного средства.
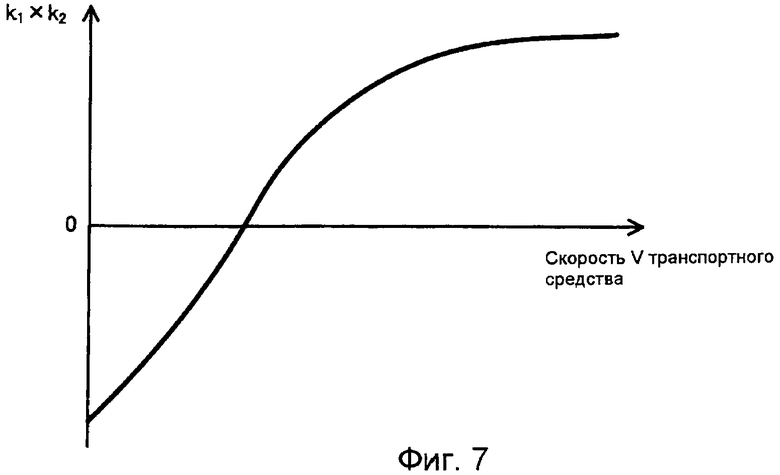
Фиг.7 - график, показывающий корреляцию величины умножения между коэффициентом, показанным на Фиг.5, и коэффициентом, показанным на Фиг.6, относительно скорости транспортного средства.
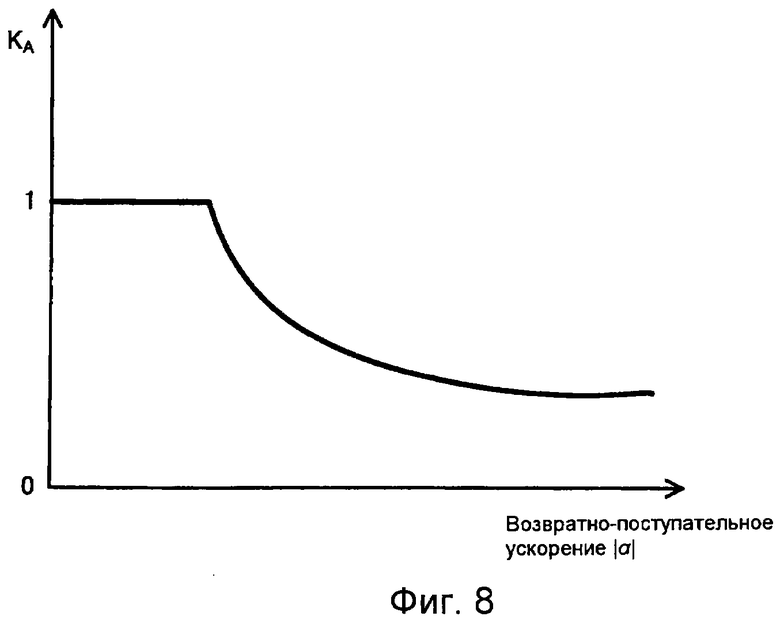
Фиг.8 - график, показывающий значение коэффициента возвратно-поступательного ускорения относительно абсолютного значения возвратно-поступательного ускорения.
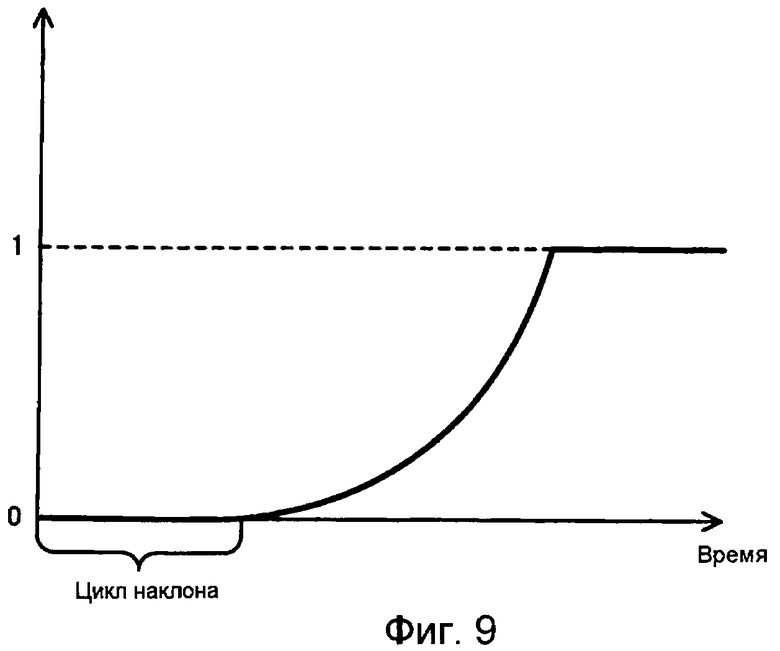
Фиг.9 - график, показывающий значение коэффициента возвратно-поступательного ускорения относительно прошедшего времени от начала изменения возвратно-поступательного ускорения.
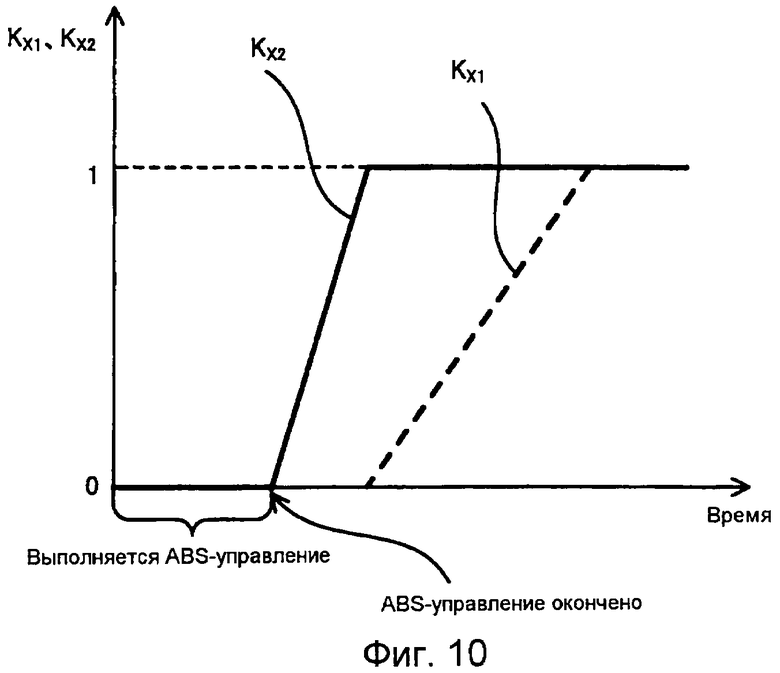
Фиг.10 - график, показывающий значения ABS-коэффициентов относительно времени.
Перечень ссылочных позиций
1 - транспортное средство
5, 6 - переднее колесо
7, 8 - заднее колесо
10 - устройство рулевого управления с электроусилителем
11 - рулевое колесо
13 - датчик угла поворота рулевого колеса
14 - датчик крутящего момента
15 - электродвигатель
30 - ЭБУ (электронный блок управления)
41 - датчик скорости транспортного средства
Наилучший способ реализации изобретения
Далее в данном документе наилучший способ реализации изобретения будет пояснен со ссылкой на чертежи.
(1) Основная структура
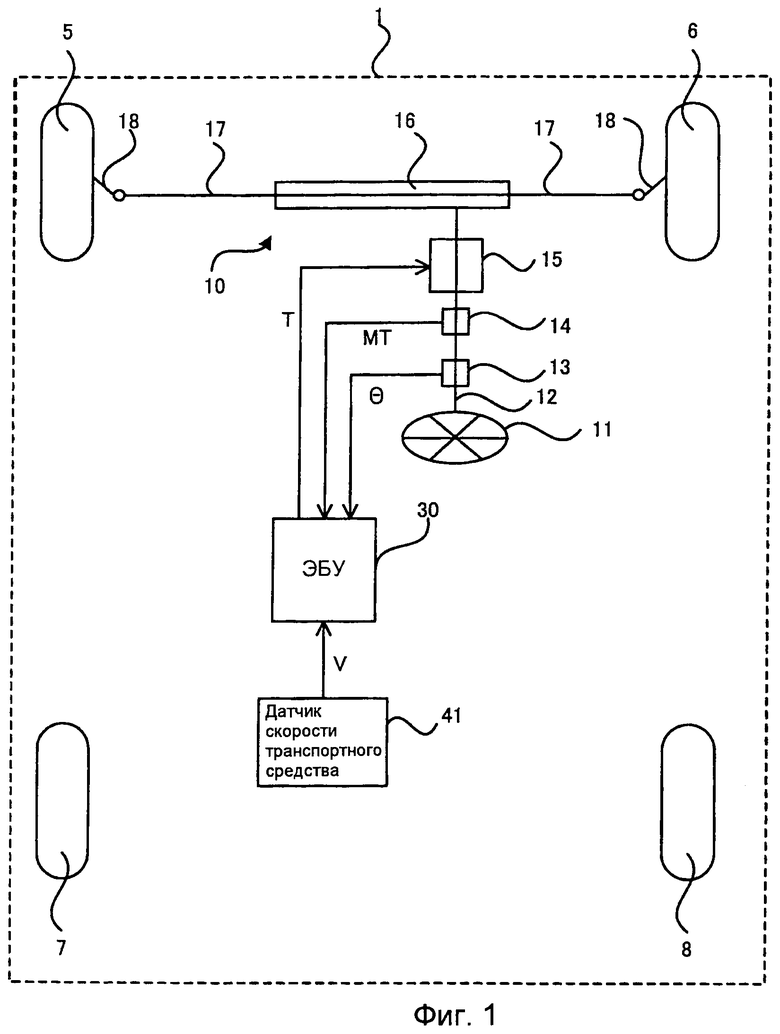
Сначала, со ссылкой на Фиг.1, будет дано пояснение по основной структуре варианта осуществления устройства управления рулевого управления транспортного средства настоящего изобретения. Фиг.1 представляет собой схематический структурный вид, концептуально показывающий основную структуру транспортного средства, которое использует вариант осуществления устройства рулевого управления транспортного средства настоящего изобретения.
Как показано на Фиг.1, транспортное средство 1 снабжено передними колесами 5 и 6, т.е. колесами 5, 6, и задними колесами 7 и 8, т.е. колесами 7, 8. По меньшей мере, любые из передних колес или задних колес приводятся в движение посредством получения движущей силы двигателя. В то же время передние колеса управляются рулем, так что транспортное средство 1 может двигаться в требуемом направлении.
Передние колеса 5, 6, которые являются управляемыми колесами, управляются устройством 10 рулевого управления с электроусилителем, которое приводится в действие в соответствии с рулением рулевым колесом 11 водителем. В частности, устройство 10 рулевого управления с электроусилителем является, например, устройством рулевого управления с электроусилителем с реечной передачей. Устройство 10 рулевого управления с электроусилителем снабжено рулевым валом 12, один конец которого соединяется с рулевым колесом 11; механизмом 16 реечной передачи, соединенным с другим концом рулевого вала 12; датчиком 13 угла поворота рулевого колеса для определения угла θ поворота рулевого колеса, который является углом поворота рулевого колеса 11; датчиком 14 крутящего момента для определения крутящего момента MT рулевого управления, прикладываемого к рулевому валу 12 посредством управления рулевым колесом 11; и электродвигателем 15 как для формирования вспомогательного усилия в рулевом управлении, которое уменьшает нагрузку водителя при рулении, так и приложения вспомогательного усилия в рулевом управлении к рулевому валу 12 через непроиллюстрированный редуктор, чтобы уменьшать скорость.
В устройстве 10 рулевого управления с электроусилителем ЭБУ 30 вычисляет целевой вспомогательный крутящий момент T, который является крутящим моментом, который должен быть сгенерирован электродвигателем 15 на основе угла θ поворота рулевого колеса, который выводится из датчика 13 угла поворота рулевого колеса, крутящего момента MT рулевого управления, который выводится из датчика 14 крутящего момента, и скорости V транспортного средства, которая выводится из датчика 41 скорости транспортного средства.
Целевой вспомогательный крутящий момент T выводится из ЭБУ 30 к электродвигателю 15; и электрический ток согласно целевому вспомогательному крутящему моменту T прикладывается к электродвигателю 15, за счет электродвигатель 15 приводится в действие. Этим самым вспомогательное усилие в рулевом управлении прикладывается от электродвигателя 15 к рулевому валу 12, что приводит в результате к уменьшению нагрузки на водителя при рулении. Более того благодаря механизму 16 реечной передачи, усилие в направлении поворота рулевого вала 12 преобразуется в усилие в возвратно-поступательном направлении зубчатой рейки 17. Оба конца зубчатой рейки 17 соответственно соединены с передними колесами 5, 6 через поперечную рулевую тягу 18. И направление передних колес 5, 6 изменяется в соответствии с возвратно-поступательным движением зубчатой рейки 17.
(2) Принцип работы
Далее, со ссылкой на Фиг.2 более подробное пояснение будет дано по работе устройства 10 рулевого управления с электроусилителем в варианте осуществления. Фиг.2 является блок-схемой, концептуально показывающей полностью работу устройства 10 рулевого управления с электроусилителем.
Как показано на Фиг.2, основной вспомогательный крутящий момент AT, который является основой вспомогательного усилия в рулевом управлении, которое должно прикладываться от электродвигателя 15, вычисляется посредством работы ЭБУ 30 (этап S10). Когда основной вспомогательный крутящий момент AT вычисляется, сначала различные сигналы (например, скорость V транспортного средства, крутящий момент MT рулевого управления и т.п.), необходимые, чтобы вычислять основной вспомогательный крутящий момент AT, считываются посредством ЭБУ 30. Затем основной вспомогательный крутящий момент AT вычисляется на основе считанных различных сигналов.
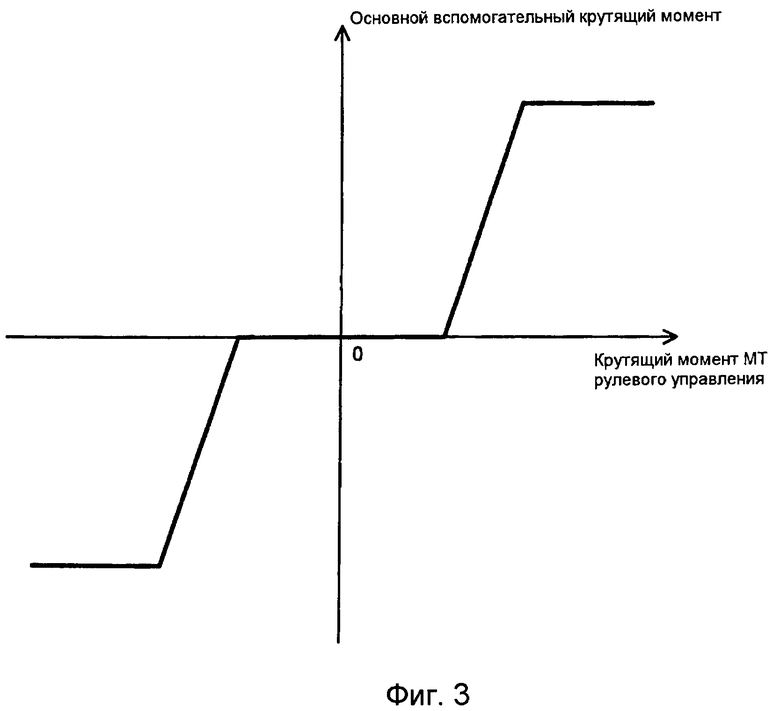
Теперь, со ссылкой на Фиг.3 будет описан конкретный пример операции вычисления основного вспомогательного крутящего момента AT. Фиг.3 - это график, показывающий основной вспомогательный крутящий момент AT.
Как показано на Фиг.3, например, основной вспомогательный крутящий момент AT может быть вычислен на основе графика (или соответствия), указывающего соотношение между крутящим моментом MT рулевого управления и основным вспомогательным крутящим моментом AT. Более конкретно, для того чтобы обеспечить свободный ход или пределы рулевого колеса 11, основной вспомогательный крутящий момент AT вычисляется как 0, т.е. нулевой, если крутящий момент MT является относительно небольшим. Если крутящий момент MT рулевого управления имеет определенную степень величины, больший основной вспомогательный крутящий момент AT вычисляется, когда крутящий момент MT рулевого управления увеличивается. Если крутящий момент MT рулевого управления больше, чем предварительно определенное значение, вычисляется основной вспомогательный крутящий момент AT с постоянным значением, которое не изменяется в зависимости от величины крутящего момента MT рулевого управления. В то же время, когда скорость V транспортного средства выше, основной вспомогательный крутящий момент AT может иметь меньшее значение.
Впрочем, приведенная в пример операция вычисления основного вспомогательного крутящего момента AT является просто одним примером и очевидно, другой способ может использоваться для вычисления основного вспомогательного крутящего момента AT.
Опять возвращаясь к Фиг.2, затем, скорость V транспортного средства и угол θ поворота рулевого колеса получаются посредством работы ЭБУ 30 (этап S11). Конкретно, и скорость V транспортного средства, обнаруженная в датчике 41 скорости транспортного средства, и угол θ поворота рулевого колеса, обнаруженный в датчике 13 угла поворота рулевого колеса, выводятся в ЭБУ 30.
Затем, скорость γ поворота вокруг вертикальной оси и угол β бокового увода транспортного средства 1 оцениваются (или вычисляются) посредством работы ЭБУ 30 на основе каждой из скорости V транспортного средства и угла θ поворота рулевого колеса, полученных на этапе S11 (этап S12). Операция оценки выполняется на основе уравнения движения в горизонтальном направлении транспортного средства 1.
В частности, уравнение движения транспортного средства 1 выражается уравнением 1, в котором расстояние между передней осью и центром тяжести транспортного средства 1 равно Lf, расстояние между задней осью и центром тяжести транспортного средства 1 равно Lr, инерционный момент вокруг вертикальной оси поворота транспортного средства 1 равен I, коэффициент сопротивления переднего колеса боковому уводу транспортного средства 1 равен Kf, коэффициент сопротивления заднего колеса боковому уводу транспортного средства 1 равен Kr, масса транспортного средства 1 равна m и угол отклонения управляемых колес равен δ.
[Уравнение 1]
Здесь, расстояние Lf между передней осью и центром тяжести транспортного средства 1, расстояние Lr между задней осью и центром тяжести транспортного средства 1, инерционный момент I вокруг вертикальной оси поворота транспортного средства 1, коэффициент Kf сопротивления переднего колеса боковому уводу транспортного средства 1, коэффициент Kr сопротивления заднего колеса боковому уводу транспортного средства 1 и масса m транспортного средства 1 являются уникальными значениями, которые уникальны для транспортного средства 1. Таким образом, вводя конкретные примеры уникальных значений (или общих параметров) в уравнение 1, уравнение 1 становится функцией скорости V транспортного средства и угла δ отклонения управляемых колес. Более того, угол δ отклонения управляемых колес получается из угла θ поворота рулевого колеса, передаточного коэффициента механизма реечной передачи и т.п. (другими словами, из характеристик устройства 10 рулевого управления с электроусилителем). Таким образом, объединяя каждую из дифференциальных величин скорости γ поворота вокруг вертикальной оси и угла β бокового увода, полученных из уравнения 1, скорость γ поворота вокруг вертикальной оси и угол β бокового увода оцениваются из скорости V транспортного средства и угла θ поворота рулевого колеса.
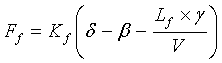
Затем поперечная сила Ff на передних колесах 5, 6 и поперечная сила Fr на задних колесах 7, 8 оцениваются посредством работы ЭБУ 30 на основе каждого параметра из скорости γ поворота вокруг вертикальной оси и угла β бокового увода, оцененных на этапе S12 (этап S13). Та же операция оценки выполняется на основе уравнений движения в горизонтальном направлении или плоскостном направлении транспортного средства 1. В частности, поперечная сила Ff на передних колесах 5, 6 и поперечная сила Fr на задних колесах 7, 8 оцениваются с помощью уравнений 2 и 3.
[Уравнение 2]
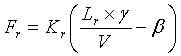
[Уравнение 3]
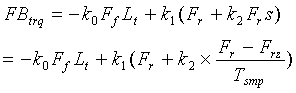
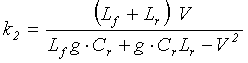
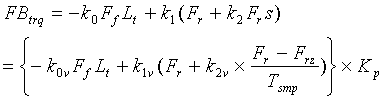
Затем корректирующий крутящий момент FBtrq для коррекции основного вспомогательного крутящего момента AT, вычисленного на этапе S10, вычисляется посредством работы ЭБУ 30 на основе каждой из поперечной силы Ff на передних колесах 5, 6 и поперечной силы Fr на задних колесах 7, 8, оцененных на этапе S13 (этап S14). В частности, корректирующий крутящий момент FBtrq вычисляется посредством уравнения 4. В данном случае, в уравнении 4 траектория транспортного средства 1 равна Lt, период, в течение которого поперечная сила Ff на передних колесах 5, 6 и поперечная сила Fr на задних колесах 7, 8 оцениваются, равен Tsmp (другими словами, период, в котором выполняются операции, показанные на Фиг.2: период дискретизации), а поперечная сила Fr на задних колесах 7, 8, оцененная одним этапом ранее, равна Frz. Кроме того, k0, k1 и k2 являются предварительно определенными коэффициентами, показанными в уравнениях 5-7 соответственно. В данном случае, в уравнениях 5-7 предполагается, что нормализованный коэффициент сопротивления переднего колеса боковому уводу транспортного средства 1 равен Cf, и что нормализованный коэффициент сопротивления заднего колеса боковому уводу транспортного средства 1 равен Cr.
[Уравнение 4]
[Уравнение 5]

[Уравнение 6]

[Уравнение 7]
Здесь, коэффициенты k0, k1 и k2, показанные в уравнениях 5-7, могут быть получены решением уравнения движения в горизонтальном направлении или плоскостном направлении транспортного средства 1, показанного в уравнении 8, принимая во внимание следующее действие или операцию, которая должна вызываться посредством следующего корректирующего крутящего момента FBtrq. В данном случае, в уравнении 8, предполагается, что инерционный момент вокруг оси поворота равен Is и что коэффициент момента затухания вокруг оси поворота равен Cs.
[Уравнение 8]

Сначала, в уравнении 8 выясняется, что если целевой вспомогательный крутящий момент T получается с акцентом на предотвращении колебания угла поворота вокруг вертикальной оси транспортного средства 1 (другими словами, увеличение амортизации транспортного средства 1), целевой вспомогательный крутящий момент T может быть установлен на основе как поперечной силы Fr на задних колесах 7, 8, так и дифференциальной величины поперечной силы Fr. Конкретно, сумма величины, полученной умножением поперечной силы Fr на задних колесах 7, 8 на коэффициент k1, и величины, полученной умножением дифференциальной величины Frs поперечной силы Fr на задних колесах 7, 8 на коэффициент k2, может быть добавлена к основному вспомогательному крутящему моменту AT, и добавленный основной вспомогательный крутящий момент может быть вычисленным целевым вспомогательным крутящим моментом T. В результате, получаются коэффициенты k1 и k2, которые нужны для того, чтобы вычислять как составляющую корректирующего крутящего момента (k1Fr) на основе поперечной силы Fr на задних колесах 7, 8 (т.е. составляющую корректирующего крутящего момента (k1Fr) на основе пропорциональной величины (Fr) поперечной силы Fr на задних колесах 7, 8, так и составляющую корректирующего крутящего момента (k1k2Frs) на основе дифференциальной величины (Frs) поперечной силы Fr на задних колесах 7, 8) в корректирующем крутящем моменте FBtrq для корректировки основного вспомогательного крутящего момента AT.
Вышеупомянутая составляющая корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8, главным образом, действует, чтобы уменьшать основной вспомогательный крутящий момент AT. Другими словами, составляющая корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8, главным образом, действует, чтобы поворачивать передние колеса 5, 6 в направлении сходимости колебания угла поворота вокруг вертикальной оси транспортного средства 1, если транспортное средство 1 находится в состоянии прохождения поворота (в частности, если транспортное средство 1 находится в промежуточном состоянии прохождения поворота или состоянии прохождения небольшого поворота).
С одной стороны, например, если транспортное средство 1 находится в состоянии прохождения плавного поворота, колебание угла поворота вокруг вертикальной оси вряд ли происходит в транспортном средстве 1 из-за устойчивого поведения транспортного средства 1. С другой стороны, даже если транспортное средство 1 находится в состоянии прохождения плавного поворота, составляющая корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 применяется к основному вспомогательному крутящему моменту AT. Таким образом, добавляя даже при этих условиях или просто добавляя составляющую корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 к основному вспомогательному крутящему моменту AT, например водитель, вероятно, обнаружит, что руление происходит тяжело, когда транспортное средство 1 находится в состоянии прохождения плавного поворота. Таким образом, предпочтительно дополнительно применять составляющую крутящего момента к основному вспомогательному крутящему моменту AT для отмены уменьшения основного вспомогательного крутящего момента AT посредством составляющей корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 (в частности, для уменьшения, когда транспортное средство 1 находится в состоянии прохождения поворота или в состоянии прохождения плавного поворота).
Принимая во внимание вышеупомянутый момент, в варианте осуществления выясняется, что составляющая крутящего момента для отмены уменьшения в основном вспомогательном крутящем моменте AT посредством составляющей корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 (в частности, для уменьшения, когда транспортное средство находится в состоянии прохождения поворота или в состоянии прохождения плавного поворота), может дополнительно применяться к основному вспомогательному крутящему моменту AT на основе поперечной силы Ff на передних колесах 5, 6. Другими словами, особенно, когда транспортное средство 1 находится в состоянии прохождения плавного поворота сумма составляющей корректирующего крутящего момента на основе поперечной силы Ff на передних колесах 5, 6 и составляющей корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 предпочтительно равна нулю. В результате, получается коэффициент k0, который необходим, чтобы вычислять составляющую корректирующего крутящего момента (одночлен -k0FfLt) на основе поперечной силы Ff на передних колесах 5, 6 в корректирующем крутящем моменте FBtrq.
Составляющая корректирующего крутящего момента на основе поперечной силы Ff на передних колесах 5, 6, полученная с этой точки зрения, действует, главным образом, так, чтобы увеличивать основной вспомогательный крутящий момент AT. В частности, составляющая корректирующего крутящего момента на основе поперечной силы Ff на передних колесах 5, 6 отменяет уменьшение в основном вспомогательном крутящем моменте AT, который имеет составляющую корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8, особенно, когда транспортное средство 1 находится в состоянии прохождения плавного поворота.
В данном случае из корректирующего крутящего момента FBtrq, показанного в уравнении 4, составляющая (k1Fr) корректирующего крутящего момента на основе пропорциональной величины (Fr) поперечной силы Fr на задних колесах 7, 8 соответствует одной части "первого корректирующего усилия в рулевом управлении" настоящего изобретения (т.е. "третьему корректирующему усилию в рулевом управлении" настоящего изобретения). Кроме того, из корректирующего крутящего момента FBtrq, показанного в уравнении 4, составляющая (k1k2Frs) корректирующего крутящего момента на основе дифференциальной величины (Frs) поперечной силы Fr на задних колесах 7, 8 соответствует одной части "первого корректирующего усилия в рулевом управлении" настоящего изобретения (т.е. "четвертому корректирующему усилию в рулевом управлении" настоящего изобретения). Кроме того, из корректирующего крутящего момента FBtrq, показанного в уравнении 4, составляющая корректирующего крутящего момента (одночлен -k0FfLt) на основе поперечной силы Ff на передних колесах 5, 6 соответствует "второму корректирующему усилию в рулевом управлении" настоящего изобретения.
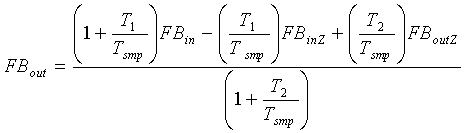
Возвращаясь к Фиг.2, после того, как корректирующий крутящий момент FBtrq вычисляется таким образом, выполняется компенсация задержки по корректирующему крутящему моменту FBtrq посредством работы ЭБУ 30 (этап S15). Компенсация задержки, выполняемая здесь, компенсирует задержку времени, требуемого для операций на этапах S11-S15 (т.е. времени от момента времени получения скорости V транспортного средства и угла θ поворота рулевого колеса до момента времени окончания вычисления корректирующего крутящего момента FBtrq). В частности, выполняется арифметическое вычисление, выраженное уравнением 9. В результате, вычисляется корректирующий крутящий момент FBtrq после компенсации задержки (т.е. результат компенсации задержки, выполненной по корректирующему крутящему моменту). В данном случае в уравнении 9 предполагается, что корректирующий крутящий момент перед компенсацией равен FBin, что корректирующий крутящий момент после компенсации равен FBout, что корректирующий крутящий момент перед компенсацией одним этапом ранее равен FBinz, что корректирующий крутящий момент после компенсации одним этапом ранее равен FBoutz, что время компенсации задержки равно T1, и что знаменатель времени компенсации задержки равен T2.
[Уравнение 9]
Затем крутящий момент, полученный посредством применения корректирующего крутящего момента FBtrq (т.е. корректирующий крутящий момент FBout после компенсации), по которому выполняется компенсация задержки на этапе S15, к основному вспомогательному крутящему моменту AT, вычисленному на этапе S10, устанавливается в целевой вспомогательный крутящий момент T посредством работы ЭБУ 30 (этап S16).
Как объяснено выше, согласно варианту осуществления добавление составляющей корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 (т.е. составляющей корректирующего крутящего момента, которая уменьшает основной вспомогательный крутящий момент AT), к основному вспомогательному крутящему моменту AT может предпочтительно предотвращать взаимное влияние или резонанс между вибрацией в рулевом управлении и колебанием угла поворота вокруг вертикальной оси транспортного средства 1. Следовательно, возможно предпочтительно сводить в одну точку вибрацию передних колес 5, 6 и, в результате, возможно улучшать способность к стабилизации транспортного средства 1. Кроме того, в варианте осуществления корректирующий крутящий момент FBtrq предпочтительно предотвращает резонанс или взаимное влияние между вибрацией в рулевом управлении и колебанием угла поворота вокруг вертикальной оси транспортного средства 1 без чрезмерного увеличения регулировки затухания. Следовательно, можно улучшить как способность к стабилизации транспортного средства 1, так и способность к стабилизации рулевого управления.
С другой стороны, так как корректирующий крутящий момент на основе поперечной силы Ff на передних колесах 5, 6 (т.е. составляющая корректирующего крутящего момента, которая увеличивает основной вспомогательный крутящий момент AT) применяется к основному вспомогательному крутящему моменту AT, например, если транспортное средство 1 находится в состоянии прохождения плавного поворота, возможно предпочтительно предотвращать уменьшение целевого вспомогательного крутящего момента T, прилагаемого для того, чтобы помогать рулению. Следовательно, согласно варианту осуществления возможно получать эффект, который редко заставляет человека в транспортном средстве ощущать дискомфорт при рулении, например, даже если транспортное средство 1 находится в состоянии прохождения плавного поворота. Другими словами, "чувство руля" может быть улучшено.
Как описано выше, согласно варианту осуществления возможно предпочтительно компенсировать нехватку усилия в рулевом управлении, которая легко возникает, в частности, в состоянии прохождения плавного поворота, в то же время предпочтительно предотвращая взаимное влияние или резонанс между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства 1 вокруг вертикальной оси, которые легко возникают, в частности, при небольшом повороте (другими словами, улучшая способность к стабилизации транспортного средства 1 и способность к стабилизации рулевого управления).
Кроме того, в варианте осуществления выполняется так называемое опережающее управление, в котором вычисляется корректирующий крутящий момент FBtrq, после того, как и поперечная сила Ff на передних колесах 5, 6, и поперечная сила Fr на задних колесах 7, 8 оценены заранее. Таким образом, по сравнению с так называемым управлением с обратной связью, в котором вычисляется корректирующий крутящий момент FBtrq, после того, как поперечная сила Ff на передних колесах 5, 6 и поперечная сила Fr на задних колесах 7, 8 фактически определены; неудобство в том, что дискомфорт о задержки возникает при рулении, может быть соответственно предотвращено.
Более того, в варианте осуществления выполняется компенсация задержки, так что возможно предотвращать ухудшение в способности к стабилизации или дискомфорт при рулении, вызванные задержкой времени, требуемого от момента времени, в котором операция вычисления корректирующего момента FBtrq начинается, до момента времени, в котором целевой вспомогательный крутящий момент T фактически применяется.
Впрочем, в вышеупомянутом пояснении был описан такой аспект, что составляющая корректирующего крутящего момента на основе поперечной силы Ff на передних колесах 5, 6, и составляющая корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 отменяют друг друга. Однако с точки зрения улучшения в "чувстве руля" при плавном повороте составляющая корректирующего крутящего момента на основе поперечной силы Ff на передних колесах 5, 6 и составляющая корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 не должны полностью отменять друг друга. Другими словами, пока, по меньшей мере, "чувство руля" может быть улучшено, сумма составляющей корректирующего крутящего момента на основе поперечной силы Ff на передних колесах 5, 6 и составляющей корректирующего крутящего момента на основе поперечной силы Fr на задних колесах 7, 8 не должна быть нулевой.
Более того, даже для коэффициентов k0, k1 и k2 вышеупомянутые конкретные уравнения (т.е. уравнения 5-7) являются просто одним конкретным примером, и предпочтительные коэффициенты предпочтительно устанавливаются, принимая во внимание состояние транспортного средства, включающее в себя характеристики транспортного средства и конструкцию транспортного средства 1 или устройства 10 рулевого управления с электроусилителем.
Кроме того, опережающее управление не обязательно выполняется с точки зрения предпочтительной компенсации нехватки усилия в рулевом управлении, которая легко возникает, в частности, при плавном повороте, в то же время предпочтительно предотвращая взаимное влияние между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства 1 вокруг вертикальной оси, которые легко возникают, в частности, при небольшом повороте. Другими словами, может выполняться управление с обратной связью, в котором как поперечная сила Ff на передних колесах 5, 6, так и поперечная сила Fr на задних колесах 7, 8 непосредственно обнаруживаются, и корректирующий крутящий момент вычисляется на основе обнаруженной поперечной силы Ff на передних колесах 5, 6 и обнаруженной поперечной силы Fr на задних колесах 7, 8. Даже в этом случае возможно предпочтительно компенсировать нехватку усилия в рулевом управлении, которая легко возникает, в частности, при плавном повороте, в то же время предпочтительно предотвращая взаимное влияние между вибрацией в рулевом управлении и колебанием угла поворота транспортного средства 1 вокруг вертикальной оси, которые легко возникают, в частности, при небольшом повороте. Здесь предпочтительно компенсировать задержку в управлении с обратной связью.
(3) Модифицированный пример работы
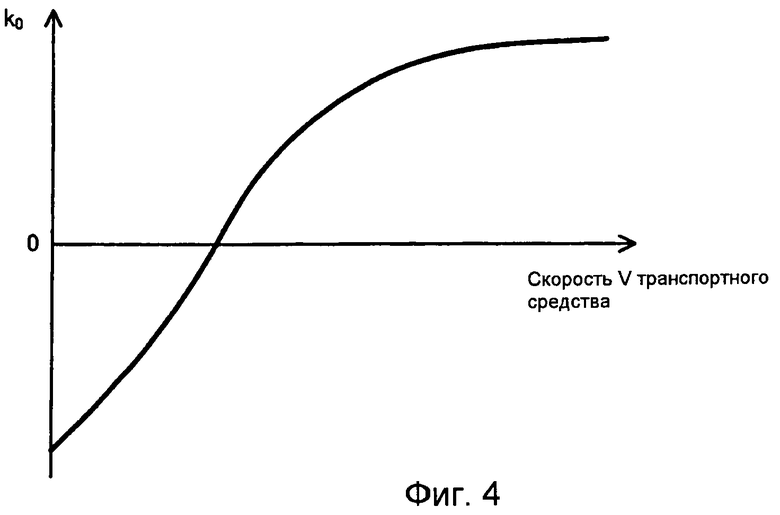
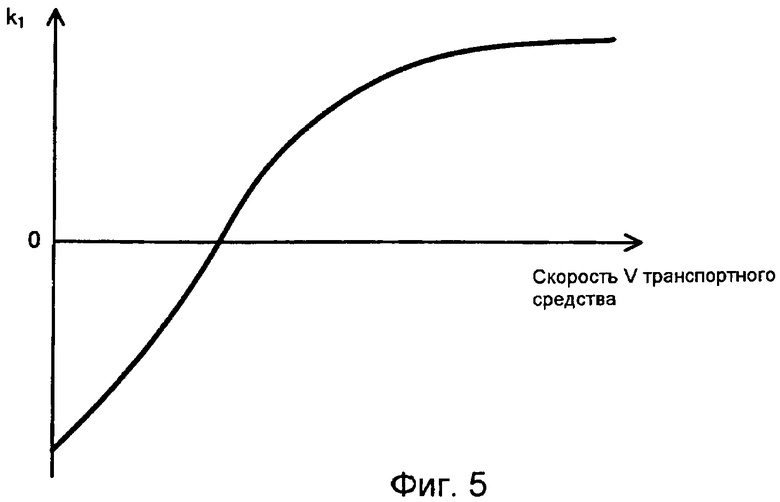
Далее, со ссылкой на Фиг. 4-7 будет пояснен модифицированный пример работы. Фиг.4 представляет собой график, показывающий корреляцию коэффициента k0, на который поперечная сила Ff на передних колесах 5, 6 умножается, когда вычисляется корректирующий крутящий момент FBtrq, относительно скорости V транспортного средства. Фиг.5 представляет собой график, показывающий корреляцию коэффициента k1, на который поперечная сила Fr на задних колесах 7, 8 умножается, когда вычисляется корректирующий крутящий момент FBtrq, относительно скорости V транспортного средства. Фиг.6 представляет собой график, показывающий корреляцию коэффициента k2, на который дифференциальная величина Frs поперечной силы на задних колесах 7, 8 умножается, когда вычисляется корректирующий крутящий момент FBtrq, относительно скорости V транспортного средства. Фиг.7 представляет собой график, показывающий корреляцию величины умножения между коэффициентом k1, показанным на Фиг.5, и коэффициентом k2, показанным на Фиг.6, относительно скорости V транспортного средства.
Каждое из расстояния Lf между передней осью и центром тяжести транспортного средства 1, расстояния Lr между задней осью и центром тяжести транспортного средства 1, нормализованного коэффициента Cf сопротивления переднего колеса боковому уводу транспортного средства 1 и нормализованного коэффициента Cr сопротивления заднего колеса боковому уводу транспортного средства 1 является величиной, уникальной для транспортного средства 1. Таким образом, вводя конкретные примеры уникальной величины (или общий параметр) в уравнения 5-7, коэффициенты k0, k1 и k2, показанные в уравнениях 5-7, выражаются как функции скорости V транспортного средства.
В результате, как показано на Фиг.4 и Фиг.5, видно, что каждый из коэффициентов k0 и k1 имеет зависимость от скорости транспортного средства, показывающую одинаковую тенденцию. Кроме того, как показано на Фиг.6, видно, что, хотя коэффициент k2 не имеет тенденции от скорости транспортного средства, умноженная величина, полученная умножением коэффициента k2 на дифференциальную величину поперечной силы Fr на задних колесах 7, 8 (т.е., k1 × k2), имеет зависимость от скорости транспортного средства, имеющую ту же корреляцию, что и зависимость каждого из коэффициентов k0 и k1, как показано на Фиг.7.
В модифицированном примере работы, фокусирующемся на зависимости коэффициентов от скорости транспортного средства, вышеупомянутые операции упрощены. Конкретно, в модифицированном примере работы коэффициенты k0v, k1v и k2v предварительно определенной скорости V транспортного средства сохраняются заранее в памяти или т.п. Затем при фактическом вычислении корректирующего крутящего момента FBtrq величины, полученные умножением коэффициентов k0v, k1v и k2v на коэффициент Kp скорости, соответствующий фактической скорости V транспортного средства, используются в качестве коэффициентов k0, k1 и k2. В результате, уравнение 4 выражается уравнением 10.
[Уравнение 10]
Следовательно, для того чтобы вычислять коэффициенты k0, k1 и k2, не требуется, чтобы уравнения 5-7 использовались, чтобы вычислять коэффициенты k0, k1 и k2 при каждом вычислении корректирующего крутящего момента FBtrq; а необходимо только умножать коэффициенты k0v, k1v и k2v, которые являются уникальными величинами, на коэффициент Kp скорости, соответствующий фактической скорости V транспортного средства. Следовательно, возможно значительно уменьшить нагрузку обработки, чтобы вычислять коэффициенты k0, k1 и k2. Следовательно, операция вычисления корректирующего крутящего момента FBtrq может быть относительно упрощена.
Впрочем, в варианте осуществления корректирующий момент FBtrq может быть дополнительно скорректирован в следующем аспекте.
Например, может быть установлен коэффициент KΒ неровной дороги. Коэффициент KΒ неровной дороги может быть установлен в числовое значение в диапазоне между 0 и 1. Если транспортное средство 1 движется по неровной дороге (например, дороге, на которой скорость V транспортного средства является высокой, и дороге, которая значительно изменяется непостоянно или внезапно, такая как дорога с плохим сцеплением и дорога с выбоинами), коэффициент KΒ неровной дороги устанавливается в 0. Альтернативно, коэффициент KΒ неровной дороги может быть установлен в значение, которое больше чем 0, и меньше чем 1, если транспортное средство 1 движется по неровной дороге. С другой стороны, коэффициент KΒ неровной дороги устанавливается в 1, если транспортное средство 1 не движется по неровной дороге (т.е., если транспортное средство 1 движется по нормальной дороге, такой как дорога с покрытием).
Коэффициент KΒ неровной дороги умножается на вышеупомянутый коэффициент k2. Следовательно, если транспортное средство 1 движется по неровной дороге, это может уменьшать или обнулять степень участия дифференциальной величины Frs поперечной силы Fr на задних колесах 7, 8, включающей в себя большой шум, относительно вычисления корректирующего крутящего момента FBtrq (другими словами, можно вычислять корректирующий крутящий момент FBtrq на основе поперечной силы Fr на задних колесах 7, 8, включающей в себя небольшой шум). В результате, возможно предпочтительно вычислять корректирующий крутящий момент FBtrq, в то же время исключая влияние неровной дороги, насколько возможно.
Кроме того, может быть установлен коэффициент KA возвратно-поступательного ускорения. Коэффициент KA возвратно-поступательного ускорения устанавливается в числовое значение в диапазоне между 0 и 1. Конкретно, коэффициент KA возвратно-поступательного ускорения устанавливается в соответствии с графиком, показанным на Фиг.8. Фиг.8 представляет собой график, показывающий величину коэффициента KA возвратно-поступательного ускорения относительно абсолютной величины возвратно-поступательного ускорения α, например ускорения, которое происходит в обратном направлении или в прямом направлении. Как показано на Фиг.8, если абсолютная величина возвратно-поступательного ускорения α транспортного средства 1 равна или меньше, чем предварительно определенная величина, коэффициент KA возвратно-поступательного ускорения устанавливается в 1. Если абсолютная величина возвратно-поступательного ускорения α транспортного средства 1 равна или больше, чем предварительно определенная величина, коэффициент KA возвратно-поступательного ускорения устанавливается, чтобы быть меньшим, чем 1, когда абсолютная величина возвратно-поступательного ускорения α транспортного средства 1 увеличивается. Альтернативно, если абсолютная величина возвратно-поступательного ускорения α транспортного средства 1 равна или больше, чем предварительно определенная величина, или если происходит наклон в транспортном средстве 1, коэффициент KA возвратно-поступательного ускорения может быть установлен в 0.
Кроме того, как показано на Фиг.9, коэффициент KA возвратно-поступательного ускорения может быть установлен в соответствии с прошедшим временем от начала изменения возвратно-поступательного ускорения α. Фиг.9 представляет собой график, показывающий значение коэффициента KA возвратно-поступательного ускорения относительно прошедшего времени от начала изменения возвратно-поступательного ускорения α. Как показано на Фиг.9, если возвратно-поступательное ускорение α начинает изменяться, коэффициент KA возвратно-поступательного ускорения может быть установлен в 0 до тех пор, пока не пройдет время, соответствующее циклу наклона, уникальному для транспортного средства 1. Коэффициент KA возвратно-поступательного ускорения может быть установлен, чтобы постепенно иметь более высокое значение в течение времени, после того как проходит время, соответствующее циклу наклона.
Коэффициент KA возвратно-поступательного ускорения умножается на вышеупомянутый коэффициент k1. Следовательно, если транспортное средство 1 ускоряется и тормозит, это может уменьшать или обнулять степень участия пропорциональной величины Fr поперечной силы на задних колесах 7, 8, которая значительно изменяется из-за ускорения и торможения, относительно вычисления корректирующего крутящего момента FBtrq (другими словами, можно вычислять корректирующий крутящий момент FBtrq на основе дифференциальной величины Frs поперечной силы на задних колесах 7, 8, которая значительно не изменяется из-за ускорения или торможения). В результате, возможно предпочтительно вычислять корректирующий крутящий момент FBtrq, в то же время исключая влияние ускорения или торможения, насколько возможно.
Кроме того, могут быть установлены ABS-коэффициенты KX1 и KX2. ABS-коэффициенты KX1 и KX2 устанавливаются в числовое значение в диапазоне между 0 и 1. Конкретно, ABS-коэффициенты KX1 и KX2 устанавливаются в соответствии с графиком, показанным на Фиг.10. Фиг.10 представляет собой график, показывающий значения ABS-коэффициентов KX1 и KX2 относительно времени. Как показано на Фиг.10, если выполняется ABS-управление, каждый из ABS-коэффициентов KX1 и KX2 устанавливается в 0. Выполняется или нет ABS-управление, может быть оценено из управляющего сигнала, который выводится из схемы ABS-управления. После чего, если ABS-управление закончено, сначала ABS-коэффициент KX2 устанавливается, чтобы постепенно иметь более высокое значение. После того, как определенное время проходит от окончания ABS-управления, затем ABS-коэффициент KX1 устанавливается, чтобы постепенно иметь более высокое значение. В это время увеличение в единицу времени ABS-коэффициента KX2 больше, чем увеличение в единицу времени ABS-коэффициента KX1. Другими словами, наклон графика, ассоциированного с ABS-коэффициентом KX1, показанным на Фиг.10, более легкий, чем наклон графика, ассоциированного с ABS-коэффициентом KX2, показанным на Фиг.10.
Впрочем, вместо операции постепенного увеличения ABS-коэффициента KX1 и ABS-коэффициента KX2 после того, как ABS-управление закончено, ABS-коэффициент KX2 может быть установлен в 1, а ABS-коэффициент KX1 может быть установлен в 0 в определенном периоде после окончания ABS-управления, и затем ABS-коэффициент KX1 может быть установлен в 1 после того, как определенный период дополнительно проходит.
Кроме того, даже в случае, когда выполняется управление возвратно-поступательными силами, такое как VSC и TRC, ABS-коэффициенты KX1 и KX2 предпочтительно устанавливаются в том же аспекте, что и при ABS-управлении.
ABS-коэффициент KX1 умножается на вышеупомянутый коэффициент k1, а ABS-коэффициент KX2 умножается на вышеупомянутый коэффициент k2. Это может уменьшать или обнулять степень участия пропорциональной величины Fr поперечной силы на задних колесах 7, 8, которая значительно изменяется из-за управления возвратно-поступательными силами относительно вычисления корректирующего крутящего момента FBtrq (другими словами, можно вычислять корректирующий крутящий момент FBtrq на основе дифференциальной величины Frs поперечной силы на задних колесах 7, 8, которая значительно не изменяется из-за управления возвратно-поступательными силами). В результате, возможно предпочтительно вычислять корректирующий крутящий момент FBtrq, в то же время исключая влияние управления возвратно-поступательными силами, насколько возможно.
Кроме того, может быть установлен коэффициент KZ подвески или SUS-коэффициент KZ. SUS-коэффициент KZ устанавливается в числовое значение в диапазоне между 0 и 1. Конкретно, если управление подвеской не выполняется, SUS-коэффициент KZ устанавливается в 1. Факт того, выполняется или нет управление подвеской, может быть оценен из управляющего сигнала S3, который выводится из схемы 34 SUS-управления. С другой стороны, если управление подвеской выполняется, SUS-коэффициент KZ устанавливается в 0, или значение, которое больше чем 0, и меньше чем 1.
Кроме того, даже в случае, когда выполняется управление вертикальной нагрузкой, т.е. переменное управление вертикальной силой тяжести, от дороги, такое как управление стабилизатором, SUS-коэффициент KZ предпочтительно устанавливается в том же аспекте, что и при управлении подвеской.
SUS-коэффициент KZ умножается на вышеупомянутый коэффициент k1. Это может уменьшать или обнулять степень участия пропорциональной величины Fr поперечной силы на задних колесах 7, 8, которая значительно изменяется из-за управления вертикальной нагрузкой, относительно вычисления корректирующего крутящего момента FBtrq (другими словами, можно вычислять корректирующий крутящий момент FBtrq на основе дифференциальной величины Frs поперечной силы на задних колесах 7, 8, которая значительно не изменяется из-за управления вертикальной нагрузкой). В результате, возможно предпочтительно вычислять корректирующий крутящий момент FBtrq, в то же время исключая влияние управления вертикальной нагрузкой, насколько возможно.
Впрочем, если скорость V транспортного средства ненормальная (например, если происходит явление аквапланирования или т.п.), вышеупомянутый коэффициент k1 предпочтительно устанавливается в 0. Это может уменьшать или обнулять степень участия пропорциональной величины Fr поперечной силы на задних колесах 7, 8, которая значительно изменяется из-за ненормальной скорости V транспортного средства, относительно вычисления корректирующего крутящего момента FBtrq (другими словами, можно вычислять корректирующий крутящий момент FBtrq на основе дифференциальной величины Frs поперечной силы на задних колесах 7, 8, включающей в себя небольшое изменение). В результате, возможно предпочтительно вычислять корректирующий крутящий момент FBtrq, в то же время исключая влияние ненормальной скорости V транспортного средства, насколько возможно.
Впрочем, в вышеупомянутом варианте осуществления передние колеса 5, 6 управляются на основе крутящего момента MT рулевого управления и целевого крутящего момента T рулевого управления. Однако даже при так называемом активном рулевом управлении, в котором управление передними колесами 5, 6 выполняется приводом на основе угла θ поворота рулевого колеса, возможно получить вышеупомянутые различные выгоды, осуществляя рулевое управление в том же аспекте, что и в вышеупомянутой операции.
Настоящее изобретение не ограничено вышеупомянутым вариантом осуществления, и могут быть сделаны различные изменения без отступления от идеи и объема изобретения, которые определены в формуле и полном описании. Устройство рулевого управления транспортного средства, которое затрагивает такие изменения, также входит в технические рамки настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ КОЛЕБАНИЯМИ И СИСТЕМА УПРАВЛЕНИЯ КОЛЕБАНИЯМИ | 2016 |
|
RU2637079C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557132C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643748C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
Изобретение относится к устройству для рулевого управления. Устройство содержит первое вычислительное устройство, второе вычислительное устройство, получающее устройство, устройство приложения усилия в рулевом управлении. Первое вычислительное устройство вычисляет основное вспомогательное усилие в рулевом управлении. Второе вычислительное устройство вычисляет первое и второе корректирующие усилия в рулевом управлении. Получающее устройство обеспечивает получение поперечной силы на каждом из передних колес и задних колес. Устройство приложения усилия обеспечивает приложение целевого вспомогательного усилия в рулевом управлении. Целевое вспомогательное усилие получено добавлением первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении к основному вспомогательному усилию в рулевом управлении. Технический результат заключается в повышении стабилизации транспортного средства. 7 з.п. ф-лы, 10 ил.
1. Устройство для рулевого управления транспортного средства, содержащее первое вычислительное устройство для вычисления основного вспомогательного усилия в рулевом управлении, чтобы помогать рулению на основе угла поворота рулевого колеса и/или крутящего момента рулевого управления, соответствующего выполнению руления пользователем в транспортном средстве, получающее устройство для получения поперечной силы на каждом из передних колес и задних колес, второе вычислительное устройство для вычисления первого корректирующего усилия в рулевом управлении, которое уменьшает основное вспомогательное усилие в рулевом управлении, на основе поперечной силы на задних колесах, и для вычисления второго корректирующего усилия в рулевом управлении, которое увеличивает основное вспомогательное усилие в рулевом управлении, на основе поперечной силы на передних колесах, и устройство приложения усилия в рулевом управлении для приложения, к транспортному средству, целевого вспомогательного усилия в рулевом управлении, полученного добавлением первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении к основному вспомогательному усилию в рулевом управлении.
2. Устройство по п.1, в котором второе вычислительное устройство вычисляет как первое корректирующее усилие в рулевом управлении, так и второе корректирующее усилие в рулевом управлении, так что сумма первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении, по существу, равна нулю, когда транспортное средство выполняет плавный поворот.
3. Устройство по п.1 или 2, в котором второе вычислительное устройство вычисляет третье корректирующее усилие в рулевом управлении, которое уменьшает основное вспомогательное усилие в рулевом управлении, на основе пропорциональной величины поперечной силы на задних колесах; вычисляет четвертое корректирующее усилие в рулевом управлении, которое уменьшает основное вспомогательное усилие в рулевом управлении, на основе дифференциальной величины поперечной силы на задних колесах; и вычисляет сумму вычисленных третьего корректирующего усилия в рулевом управлении и четвертого корректирующего усилия в рулевом управлении как первое корректирующее усилие в рулевом управлении.
4. Устройство по п.3, в котором второе вычислительное устройство вычисляет как третье корректирующее усилие в рулевом управлении, так и второе корректирующее усилие в рулевом управлении, так что сумма третьего корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении, по существу, равна нулю, когда транспортное средство выполняет плавный поворот.
5. Устройство по п.1 или 2, дополнительно содержащее устройство определения для определения скорости транспортного средства и угла поворота рулевого колеса, при этом получающее устройство получает поперечную силу на каждом из передних колес и задних колес, оценивая поперечную силу на каждом из передних колес и задних колес на основе каждого параметра из скорости поворота вокруг вертикальной оси и угла бокового увода, оцененных на основе скорости транспортного средства и угла поворота рулевого колеса, определенных устройством определения.
6. Устройство по п.1 или 2, в котором второе вычислительное устройство соответственно вычисляет первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении на основе результата умножения поперечной силы на задних колесах и первого корректирующего коэффициента, вычисленного на основе модели движения транспортного средства в плоскостном направлении, и результата умножения между поперечной силы на передних колесах и второго корректирующего коэффициента, на основе модели движения транспортного средства в плоскостном направлении.
7. Устройство по п.6, в котором первый корректирующий коэффициент и второй корректирующий коэффициент имеют зависимость от скорости транспортного средства, и второе вычислительное устройство вычисляет каждое из первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении, используя коэффициент, полученный умножением первого корректирующего коэффициента и второго корректирующего коэффициента, когда скорость транспортного средства равна предварительно определенной скорости, на коэффициент скорости, установленный на основе каждой из фактической скорости транспортного средства и зависимости первого корректирующего коэффициента и второго корректирующего коэффициента от скорости транспортного средства.
8. Устройство по п.1 или 2, в котором второе вычислительное устройство осуществляет компенсацию задержки, принимая во внимание время, требуемое для того, пока первое корректирующее усилие в рулевом управлении и второе корректирующее усилие в рулевом управлении не будут вычислены, по первому корректирующему усилию в рулевом управлении и второму корректирующему усилию в рулевом управлении, и устройство приложения усилия в рулевом управлении прикладывает целевое вспомогательное усилие в рулевом управлении, полученное добавлением первого корректирующего усилия в рулевом управлении и второго корректирующего усилия в рулевом управлении, по которым осуществляется компенсация задержки, к основному вспомогательному усилию в рулевом управлении.
| JP 2006131064 А, 25.05.2006 | |||
| JP 2007112197 А, 10.05.2007 | |||
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2004 |
|
RU2277488C1 |
| RU 94019975 А1, 10.07.1996. | |||

