Предлагаемое изобретение относится к области военной техники, в частности к артиллерийским управляемым снарядам, вращающимся по крену.
Известен магнитный датчик скорости вращения по крену, патент США 6556896 BA (заявка US 2002 42014 от 10.01.02), кл. НКИ 701-3, опубл. 29.04.03 г., устройство обеспечивает измерение скорости вращения по крену или углового положения по крену для управляемой ракеты и содержит пару магнитных датчиков, которые установлены внутри корпуса ракеты и генерируют аналоговый электрический сигнал, который отображает изменение интенсивности магнитного поля Земли вследствие наличия ферромагнитного элемента, который расположен внутри поля. Аналоговые сигналы преобразуют в цифровой формат и в составе потока данных передают на наземную станцию, где при помощи персонального компьютера вычисляют угловую скорость вращения ракеты по крену.
Использование в управлении ракетой интенсивности электромагнитного поля, которая сама по себе является величиной весьма нестабильной и зависящей от многих геофизических факторов, приводит к погрешностям в ее измерении, а следовательно, и к неточности в наведении ракеты на цель. Кроме того, конструкция устройства предполагает наличие постоянной связи с наземной станцией, которая фактически управляет по крену ракетой, что значительно снижает помехозащищенность контура управления ракетой в целом.
Известно устройство для управления траекторией полета снаряда, патент США 6629668 BA (заявка 62092 от 04.02.02), кл. НКИ 244-3.22, опубл. 7.10.03, которое является прототипом предлагаемого изобретения. Для корректировки траектории движения снаряда после старта с корабля используют бортовые акселерометры, которые установлены ортогонально вдоль продольной оси снаряда. Нежелательные отклонения от заданной траектории корректируются путем срабатывания импульсных двигателей по сигналам с акселерометров, преобразованным в бортовой электронной аппаратуре. Импульсные двигатели установлены на периферийной поверхности корпуса снаряда. Подобное управление траекторией движения снаряда может существенно увеличить дальность стрельбы подобными снарядами из артиллерийских орудий.
Однако срабатывание импульсных двигателей, необходимых для корректировки траектории движения, является значительным возмущающим фактором, приводящим к дополнительным колебаниям снаряда. При стрельбе на большие дальности это влечет за собой увеличение рассеивания и большие промахи при подходе снаряда к цели.
Задачей, решаемой данным изобретением, является повышение точности стрельбы артиллерийскими снарядами при одновременном увеличении дальности, за счет уменьшения (демпфирования) колебаний снаряда на траектории. Поставленная задача достигается тем, что в управляемом вращающемся снаряде, содержащем электронную аппаратуру управления, органы управления траекторией полета и чувствительные элементы отклонения снаряда от заданной траектории, органы управления выполнены в виде аэродинамических рулей, а чувствительные элементы скомпонованы на базе двух микромеханических гироскопов (ММГ), размещенных на двух взаимно перпендикулярных платах с установленными на них радиоэлементами, обеспечивающими совмещение сигналов ММГ, поступающих в электронную аппаратуру управления, с ее собственными сигналами, которые поступают на органы управления, при этом платы закреплены на общем основании, установленном перпендикулярно продольной оси снаряда X так, что чувствительные оси ММГ перпендикулярны друг другу и съюстированы с соответствующими поперечными осями Y и Z снаряда, причем основание развернуто в направлении вращения снаряда относительно аэродинамических рулей на угол, величина которого эквивалентна времени формирования команд для органов управления.
При таком регулировании величины команды управления колебания снаряда преобразуются в затухающие, уменьшается лобовое сопротивления снаряда, увеличивается дальность стрельбы и вероятность попадания снаряда в цель.
Изобретение поясняется графическим материалом: фиг.1 и 2.
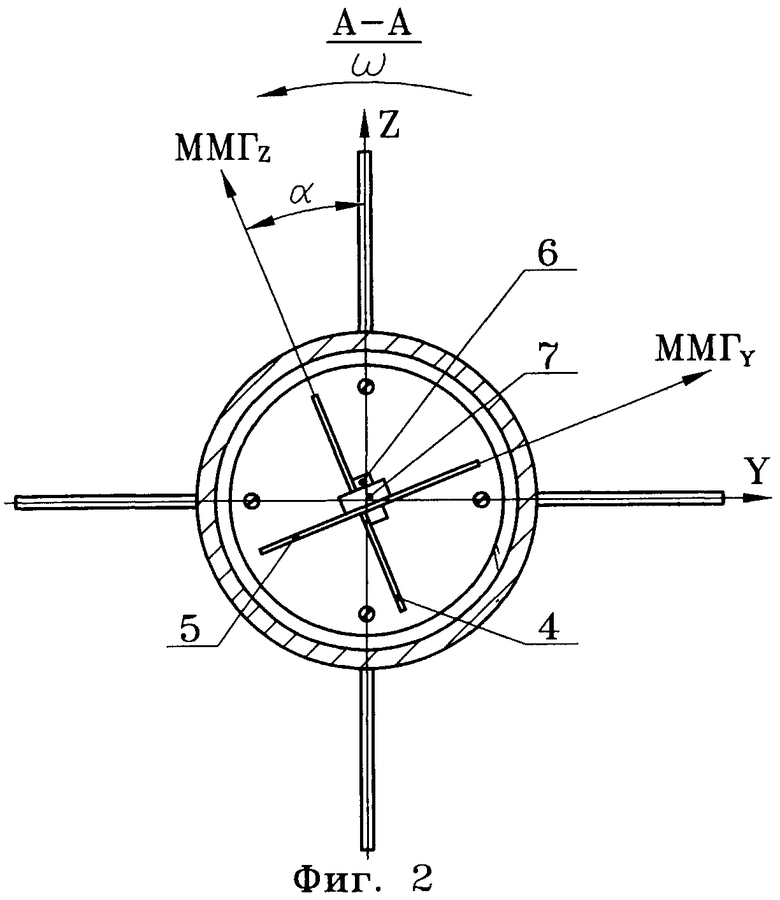
На фиг.1 представлен общий вид снаряда с ММГ, установленными на платах, закрепленных на общем основании, на фиг.2 - вид по сечению А-А.
Управляемый снаряд 1 включает в себя аэродинамические рули 2, а чувствительные элементы представляют собой расположенное внутри снаряда 1, в его перпендикулярной продольной оси Х плоскости, основание в виде диска 3, к которому прикреплены две перпендикулярно расположенные платы 4 и 5. На этих двух платах смонтированы микромеханические гироскопы 6 и 7 (ММГY и ММГZ), необходимые для измерения угловых скоростей колебаний снаряда относительно перпендикулярных осей (соответственно Y и Z). Чувствительная ось ММГY съюстирована с осью изделия Y, а чувствительная ось ММГz съюстирована с осью изделия Z. Чувствительные оси ММГY и ММГZ развернуты друг относительно друга на 90° и лежат в перпендикулярной плоскости изделия. На платах также размещены радиоэлементы, обеспечивающие совмещение сигналов ММГ, поступающих в электронную аппаратуру управления. Передача сигналов с ММГ в электронную аппаратуру управления 8 производится с помощью жгута. Основание с платами развернуто в плоскости по направлению вращения ω снаряда на угол α относительно плоскости аэродинамических рулей 2. Величина угла α определяется временем эквивалентного запаздывания при выдаче электрических параметров в бортовую аппаратуру и временем формирования команд управления.
Из-за колебательных движений снаряда на траектории в чувствительных элементах ММГ возникают электрические сигналы, которые пропорциональны угловым скоростям колебаний в вертикальной и горизонтальной плоскостях. Электрические сигналы, после адаптации, попадают в электронную аппаратуру. Электронная аппаратура их обрабатывает и подает команды на аэродинамические рули.
Демпфирование колебаний снаряда по двум перпендикулярным осям осуществляется сигналами с датчика угловых скоростей, которые после определенной обработки и преобразования поступают в бортовую аппаратуру снаряда, где происходит их алгебраическое суммирование с основными сигналами управления. Полученные в результате алгебраического суммирования команды подаются на аэродинамические рули. В случае, когда направление колебания по какой-либо из экваториальных осей ведет к нежелательному отклонению снаряда от заданной траектории, команды, передаваемые на органы управления снаряда, увеличиваются пропорционально величине сигнала с датчика угловых скоростей. Если же направление колебания таково, что стремится вернуть снаряд на заданную траекторию, - команды, передаваемые на органы управления снаряда, уменьшаются также пропорционально величине сигнала с датчика угловых скоростей.
Таким образом, использование в контуре управления артиллерийского снаряда ММГ для активного демпфирования колебаний на траектории позволяет обеспечить устойчивое наведение снаряда при наличии возмущающих факторов и, следовательно, повысить дальность и точность стрельбы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНАЯ УПРАВЛЯЕМАЯ ВРАЩАЮЩАЯСЯ РАКЕТА | 2014 |
|
RU2561319C1 |
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 2012 |
|
RU2502042C1 |
| УПРАВЛЯЕМЫЙ ВРАЩАЮЩИЙСЯ СНАРЯД | 2002 |
|
RU2231745C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ПРОДОЛЬНОЙ ОСИ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2401981C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
Изобретение относится к управляемым вращающимся снарядам. Снаряд содержит электронную аппаратуру управления, органы управления, выполненные в виде аэродинамических рулей, и чувствительные элементы отклонения снаряда от заданной траектории, которые скомпонованы на базе двух микромеханических гироскопов (ММГ), размещенных на двух взаимно перпендикулярных платах с установленными на них радиоэлементами, обеспечивающими совмещение сигналов ММГ, поступающих в электронную аппаратуру управления, с ее собственными сигналами, которые поступают на органы управления. Платы закреплены на общем основании, установленном перпендикулярно продольной оси снаряда Х так, что чувствительные оси ММГ перпендикулярны друг другу и съюстированы с соответствующими поперечными осями Y и Z снаряда, причем основание развернуто в направлении вращения снаряда относительно аэродинамических рулей на угол, величина которого эквивалентна времени формирования команд для органов управления. Повышается точность и увеличивается дальность стрельбы артиллерийскими снарядами. 2 ил.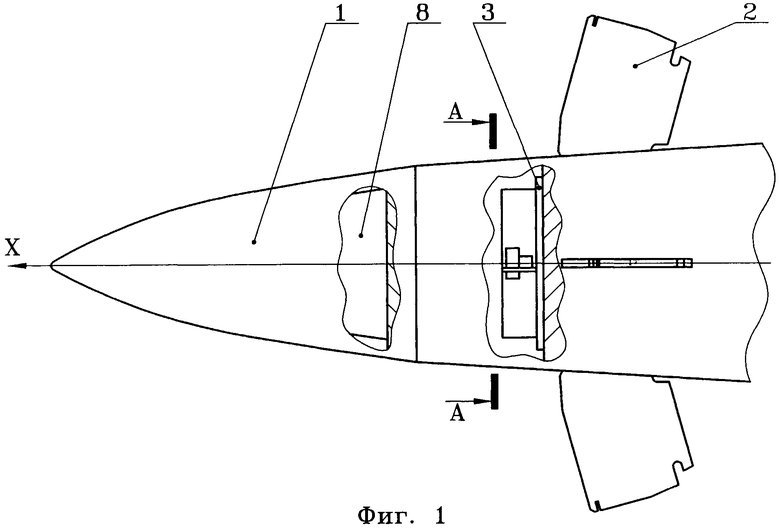
Управляемый вращающийся снаряд, содержащий электронную аппаратуру управления, органы управления траекторией полета и чувствительные элементы отклонения снаряда от заданной траектории, отличающийся тем, что органы управления выполнены в виде аэродинамических рулей, а чувствительные элементы скомпонованы на базе двух микромеханических гироскопов, размещенных на двух взаимно перпендикулярных платах с установленными на них радиоэлементами, обеспечивающими совмещение сигналов микромеханических гироскопов, поступающих в электронную аппаратуру управления, с ее собственными сигналами, которые поступают на органы управления, при этом платы закреплены на общем основании, установленном перпендикулярно продольной оси снаряда Х так, что чувствительные оси микромеханических гироскопов перпендикулярны друг другу и съюстированы с соответствующими поперечными осями Y и Z снаряда, причем основание развернуто в направлении вращения снаряда относительно аэродинамических рулей на угол, величина которого эквивалентна времени формирования команд для органов управления.
| US 6629668 B1, 07.10.2003 | |||
| RU 2002123937 A, 20.03.2004 | |||
| US 6556896 B1, 29.04.2003 | |||
| US 5143320 A, 01.09.1992. |

