Область техники
Изобретение относится к области испытательной техники, а именно к определению физико-механических характеристик твердых полимеров, в частности фторопласта, и может быть использовано для контроля непосредственно изделий без их разрушения. Предшествующий уровень техники
Известен способ определения твердости металлических изделий (патент Великобритании №1485218, МКИ G01N 3/52, «Способ определения материалов на твердость и устройство для его осуществления»). Способ заключается в нанесении удара жестким индентером по испытуемому объекту, измерении скорости отскока и скорости падения, по отношению которых судят о твердости материала. Однако этот способ не может быть применен для определения твердости пластиков или твердых полимеров ввиду сильной зависимости результатов измерений от модуля упругости полимеров, величина которого не является постоянной величиной как, например, для стали, а сильно зависит от технологических режимов изготовления.
Наиболее близким способом к заявляемому изобретению является способ определения твердости и модуля упругости путем использования непрерывной диаграммы вдавливания в процессе удара в виде зависимости контактной силы от глубины вдавливания, определения на диаграмме максимальных значений силы и глубины внедрения, и по отношению определяется твердость, а по углу наклона кривой разгрузки определяют модуль упругости (Рудницкий В.А., Дякович В.В. «Оценка модуля упругости металлических материалов методом динамического вдавливания индентора», Заводская лаборатория (диагностика материалов), 1995 г. №11, с.59-61). Недостатком этого способа является низкая точность определения твердости при контроле полимеров из-за сильного влияния упругой деформации на результат измерения твердости. Кроме того, точность определения модуля упругости снижается из-за неопределенности в регистрации начального участка кривой разгрузки.
Устройство для определения твердости по патенту Великобритании №1485218 содержит индентор с вмонтированным постоянным магнитом, который разгоняется за счет действия сжатой пружины в направляющей втулке. Устройство снабжено катушкой индуктивности, соединенной с блоком обработки и блоком индикации. Недостатком устройства является невысокая точность измерения из-за неизбежного отклонения индентора от направления, задаваемая направляющей втулкой, и касания им стенок втулки во время его свободного движения, особенно при испытании наклонно расположенных изделий.
Прототипом изобретения является устройство (А.с. СССР №1138696, МКИ G01N 3/48 «Прибор для определения твердости материалов», опубл. 1985 г., бюл. №5), содержит индентор с вмонтированным постоянным магнитом, закрепленный на конце поворотного рычага, катушку индуктивности, прикрепленную к корпусу, охватывающую постоянный магнит и электрически связанную с блоками обработки и индикации. Недостатком прибора является невозможность контролировать изделия, расположенные произвольным образом в пространстве, поскольку разгон осуществляется под действием силы тяжести.
Другим недостатком прототипа является достаточно сложная конструкция привода, предназначенного для подъема индентора (включает пружинный двигатель, шестеренчатый редуктор и рычажную систему).
Раскрытие изобретения
Задачей настоящего изобретения является создание способа и устройства, позволяющих более точно оценить твердость полимера как функцию только пластической деформации, а модуль упругости полимера - как функцию только упругой деформации.
Эта задача решена за счет того, что в способе определения твердости и модуля упругости удар наносят жестким индентором с заданной кинетической энергией по испытуемым объектам, подлежащим контролю, получают зависимости текущей контактной силы Р от глубины вдавливания α, при этом по зависимости Р(α) определяют образец с наименьшей контактной силой, выбирают значение контактного усилия, равного 1/3 от максимального значения усилия при ударе Рв=1/3Рмакс, для произвольного образца по зависимости Р(α) определяют значения остаточной глубины отпечатка αост, образующейся после окончания удара, и значения глубины вдавливания индентора на активной α1 и пассивной α2 стадиях удара, соответствующих выбранному значению контактной силы Pв, и о твердости судят по отношению значения Pв к разности глубин (α1-α2), а о модуле упругости судят по отношению контактной силы Pв к разности остаточной глубины отпечатка и глубины вдавливания на пассивной стадии удара (αост-α2).
Другая задача решена за счет того, что в устройстве определения твердости и модуля упругости, включающем корпус, основной поворотный рычаг, на конце которого закреплен индентор с вмонтированным основным постоянным магнитом, катушку индуктивности, охватывающую основной постоянный магнит, прикрепленную к корпусу и взаимодействующую с полем основного постоянного магнита, соединенную с вычислительным блоком и блоком индикации, при этом в плоскости вращения основного поворотного рычага расположен дополнительный поворотный рычаг с дополнительным постоянным магнитом, намагниченный противоположно основному постоянному магниту, над основным поворотным рычагом помещен прикрепленный к корпусу ограничитель угла поворота.
Технический результат состоит в обеспечении возможности с высокой точностью измерять свойства объектов, различным образом ориентированных в пространстве, а именно - определение твердости и модуля упругости.
Краткое описание чертежей
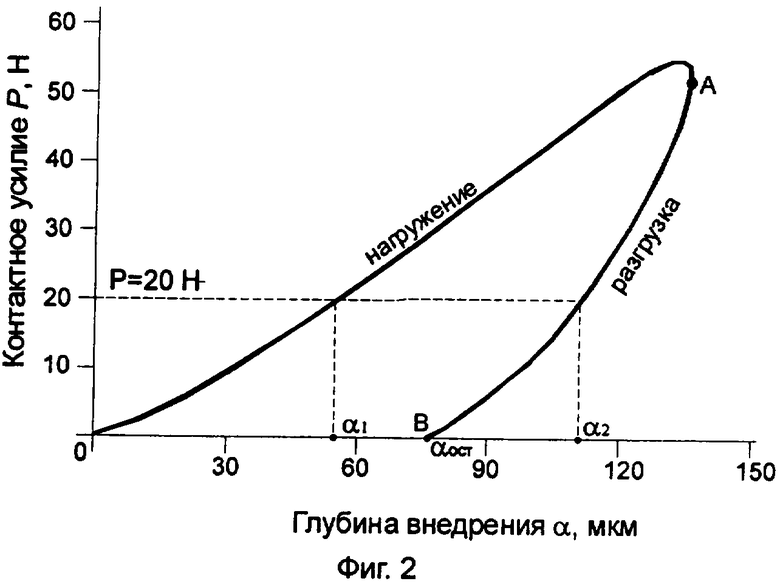
На фиг.1 представлена схема устройства для определения твердости и модуля упругости.
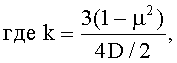
На фиг.2 представлена зависимость контактной силы Р от глубины вдавливания α.
На фиг.1 представлена схема устройства для определения твердости и модуля упругости, включающая индентор 1, с вмонтированным основным постоянным магнитом 2, закрепленный на свободном конце основного поворотного рычага 3, максимальный угол поворота которого ограничивается ограничителем 4. Индуктивная катушка 5, охватывающая основной постоянный магнит 2, неподвижно закреплена на корпусе 6 устройства и соединена с вычислительным блоком 7 и блоком индикации 8, дополнительный поворотный рычаг 9 содержит дополнительный постоянный магнит 10, поле которого направлено противоположно основному постоянному магниту 2. Испытуемый полимерный материал обозначен позицией 11.
На фиг.2 представлена зависимость контактной силы Р от глубины вдавливания α. Активная стадия удара ОА представляет стадию нагружения, а АВ - стадию разгрузки или пассивную стадию удара. Выбранной величине контактной силы Pв соответствуют значения глубины вдавливания α1 на активной стадии удара и α2 на пассивной стадии удара; αост обозначает остаточную деформацию или глубину вдавливания непосредственно после окончания удара.
Работа устройства
Предлагаемый способ поясняется работой устройства. Нажимают на свободный конец дополнительного поворотного рычага 9 (фиг.1), поднимая при этом дополнительный постоянный магнит 10. Поле дополнительного постоянного магнита 10 взаимодействует с полем основного постоянного магнита 2 и поворачивает основной поворотный рычаг 3, поднимая при этом индентор 1 до момента его касания упора 4. Продолжая нажим на дополнительный поворотный рычаг 9, дополнительный постоянный магнит 10 проходит нейтральное положение, после чего основной постоянный магнит 2 попадает в зону сильного отталкивания от дополнительного постоянного магнита 10, направленное вниз. Под действием этой силы индектор 1 ускоряется и ударяет по испытуемому образцу 11. Во время движения индектора 1 с постоянным магнитом 2 в индуктивной катушке 5 наводится сигнал пропорциональной скорости индектора. После калибровки сигнала и проведение операций дифференцирования и интегрирования в вычислительном блоке 7 производится обработка сигнала, в результате чего 4 получаем зависимость контактной силы Р от глубины внедрения α. Выбирают значение контактной силы Pв для чего производят измерения на объектах, подлежащих контролю, определяют образец с наименьшим значением максимальной контактной силы Pмакс и находят Рв=1/3 Pмакс (для нашего случая Рв=20Н) и теперь по зависимости Р(α) для произвольного образца находим значения α1=54 мкм, и α2=111 мкм (фиг.2), кроме этого из зависимости Р(α) мы определяем остаточную деформацию αocт=77 мкм.
Теперь с помощью значений Р, α1, α2 и αост определим твердость по формуле

где D - диаметр сферического наконечника индентора, в нашем случае D=1 мм, а модуль упругости определяем по формуле
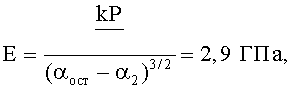
µ - коэффициент Пуассона (для твердых полимеров µ=0,4)
Промышленное применение
Предлагаемые способ и устройство позволяют с высокой точностью определять твердость и модуль упругости, отстраиваясь от их взаимного влияния, в изделиях из твердых полимерных материалов, произвольным образом ориентированных в пространстве.
Настоящее изобретение относится к области испытательной техники. Сущность: наносят удар жестким индентором с заданной кинетической энергией по испытуемым объектам, получают зависимости текущей контактной силы от глубины вдавливания. Определяют образец с наименьшей контактной силой, выбирают значение контактного усилия, равного 1/3 от максимального значения усилия при ударе. Определяют значения остаточной глубины отпечатка, образующейся после окончания удара, и значения глубины вдавливания индентора на активной и пассивной стадиях удара, соответствующих выбранному значению контактной силы. О твердости судят по отношению значения контактной силы к разности глубин на пассивной и активной стадиях удара. О модуле упругости судят по отношению контактной силы к разности остаточной глубины отпечатка и глубины вдавливания на пассивной стадии удара. Устройство содержит корпус, основной поворотный рычаг, на конце которого закреплен индентор с вмонтированным основным постоянным магнитом, катушку индуктивности, охватывающую основной постоянный магнит, прикрепленную к корпусу и взаимодействующую с полем основного постоянного магнита, соединенную с вычислительным блоком и блоком индикации. В плоскости вращения основного поворотного рычага расположен дополнительный поворотный рычаг с дополнительным постоянным магнитом, намагниченный противоположно основному постоянному магниту, над основным поворотным рычагом помещен прикрепленный к корпусу ограничитель угла поворота. Технический результат: создание способа и устройства, позволяющих более точно оценить твердость и модуль упругости полимера. 2 ил.
1. Способ определения твердости и модуля упругости, согласно которому наносят удар жестким индентором с заданной кинетической энергией по испытуемым объектам, подлежащим контролю, получают зависимости текущей контактной силы Р от глубины вдавливания α, отличающийся тем, что по зависимости Р(α) определяют образец с наименьшей контактной силой, выбирают значение контактного усилия, равного 1/3 от максимального значения усилия при ударе Рв=1/3Рмакс, для произвольного образца по зависимости Р(α) определяют значения остаточной глубины отпечатка αост, образующейся после окончания удара, и значения глубины вдавливания индентора на активной α1 и пассивной α2 стадиях удара, соответствующих выбранному значению контактной силы Рв, и о твердости судят по отношению значения Рв к разности глубин (α2-α1), а о модуле упругости судят по отношению контактной силы Рв к разности остаточной глубины отпечатка и глубины вдавливания на пассивной стадии удара (αост-α2).
2. Устройство определения твердости и модуля упругости, включающее корпус, основной поворотный рычаг, на конце которого закреплен индентор с вмонтированным основным постоянным магнитом, катушку индуктивности, охватывающую основной постоянный магнит, прикрепленную к корпусу и взаимодействующую с полем основного постоянного магнита, соединенную с вычислительным блоком и блоком индикации, отличающееся тем, что в плоскости вращения основного поворотного рычага расположен дополнительный поворотный рычаг с дополнительным постоянным магнитом, намагниченный противоположно основному постоянному магниту, над основным поворотным рычагом помещен прикрепленный к корпусу ограничитель угла поворота.
| Способ определения твердости | 1988 |
|
SU1649377A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОЙ ТВЕРДОСТИ МАТЕРИАЛОВ | 2005 |
|
RU2288458C1 |
| Устройство для определения физико-механических характеристик материалов | 1986 |
|
SU1422111A2 |
| GB 1485218 A, 08.09.1977. | |||

