Область техники, к которой относится изобретение
Настоящее изобретение относится к способу определения остаточного напряжения с использованием инструментального индентирования.
Уровень техники
Известные способы измерения или прогнозирования остаточного напряжения в образце имеют различные достоинства и недостатки.
Способы с разрушением образца, например перфорирование и распил, имеют ограниченное применение из-за своего разрушающего характера, но достоинство этих способов в том, что они требуют наличия эталонного состояния, то есть состояния без напряжения.
Способы без разрушения образца, например рентгеновское дифракционное измерение и инструментальное индентирование, предпочтительны из-за своего неразрушающего характера, но их недостаток в том, что остаточное напряжение в этих способах измеряется при отсутствии состояния без остаточного напряжения.
Чтобы преодолеть ограничения таких неразрушающих способов, ученые, используя рентгеновские дифракционные измерения, создали справочную базу данных параметров кристаллических решеток. Если материал образца известен, то с использованием этих справочных данных можно сравнивать межплоскостные расстояния в кристаллической решетке в состоянии без остаточного напряжения и в состоянии с остаточным напряжением.
В научных разработках по инструментальному индентированию трудно найти исследование, где остаточное напряжение измерялось бы без использования состояния, в котором нет остаточного напряжения. Чен с соавторами (X, Chen, J, Yan, А,М, Karlsson, Mater, Sci, Eng, A 416, 139 (2006)) предложил способ измерения остаточного напряжения с использованием метода конечных элементов, дающий возможность измерять остаточное напряжение даже при отсутствии состояния без остаточного напряжения. Однако в этой разработке также имеется недостаток, состоящий в том, что невозможно предложить действенный экспериментальный способ измерения остаточного напряжения без использования эталонного состояния.
Раскрытие изобретения
Настоящее изобретение имеет целью устранение вышеупомянутого недостатка, и аспект настоящего изобретения предлагает способ определения остаточного напряжения с использованием инструментального индентирования, позволяющий определять остаточное напряжение в образце даже при отсутствии состояния без остаточного напряжения.
Указанный аспект настоящего изобретения этим не ограничен, и из нижеследующего описания специалисты в данной области техники смогут понять другие, не упомянутые здесь аспекты настоящего изобретения.
Согласно варианту осуществления настоящего изобретения, аспект настоящего изобретения предлагает способ определения остаточного напряжения, включающий: приложение к образцу двуосного растягивающего остаточного напряжения, включающего одноосное растягивающее остаточное напряжение или одинаковое по всем направлениям растягивающее остаточное напряжение, а затем выполнение инструментального индентирования с использованием индентора; вычисление наибольшей глубины вдавливания индентора в ненапряженном состоянии образца путем подстановки в формулу для вычисления максимальной глубины вдавливания индентора в ненапряженном состоянии фактической глубины контакта в ненапряженном состоянии, полученной из фактической глубины контакта индентора, и максимальной глубины вдавливания индентора и результирующей глубины отпечатка индентора при приложении максимального вдавливающего усилия, найденных из зависимости глубины вдавливания индентора от вдавливающего усилия, полученной путем инструментального индентирования; получение кривой зависимости глубины вдавливания индентора от вдавливающего усилия в ненапряженном состоянии путем подстановки вычисленной указанным образом максимальной глубины вдавливания индентора в ненапряженном состоянии образца в формулу, связывающую глубину вдавливания индентора и вдавливающее усилие, и вычисления разности усилий между усилием, соответствующим максимальной глубине вдавливания индентора на кривой зависимости глубины вдавливания индентора от вдавливающего усилия в ненапряженном состоянии, и максимальным вдавливающим усилием; и вычисление остаточного напряжения в образце путем подстановки вычисленной разности усилий в формулу для вычисления остаточного напряжения.
Еще один аспект настоящего изобретения предлагает способ определения остаточного напряжения с использованием инструментального индентирования, причем в указанном способе формулой для вычисления максимальной глубины вдавливания индентора в ненапряженном состоянии является формула
Еще один аспект настоящего изобретения предлагает способ определения остаточного напряжения с использованием инструментального индентирования, причем в указанном способе формулой, связывающей глубину вдавливания индентора и вдавливающее усилие, является формула  , где k обозначает подгоночный коэффициент.
, где k обозначает подгоночный коэффициент.
Еще один аспект настоящего изобретения предлагает способ определения остаточного напряжения с использованием инструментального индентирования, причем в указанном способе формулой для вычисления остаточного напряжения является формула  , где Ac обозначает фактическую площадь контакта индентора для данного образца, а Ψ обозначает коэффициент пластической податливости.
, где Ac обозначает фактическую площадь контакта индентора для данного образца, а Ψ обозначает коэффициент пластической податливости.
Еще один аспект настоящего изобретения предлагает способ определения остаточного напряжения с использованием инструментального индентирования, причем в указанном способе фактическая глубина  контакта индентора вычисляется подстановкой фактической площади контакта Ас индентора для данного образца в формулу для вычисления фактической глубины контакта индентора.
контакта индентора вычисляется подстановкой фактической площади контакта Ас индентора для данного образца в формулу для вычисления фактической глубины контакта индентора.
Еще один аспект настоящего изобретения предлагает способ определения остаточного напряжения с использованием инструментального индентирования, причем в указанном способе фактическая площадь Ас контакта индентора для данного образца вычисляется с использованием формулы  , где β обозначает корректирующий коэффициент, S обозначает жесткость, а Er обозначает эффективный модуль упругости.
, где β обозначает корректирующий коэффициент, S обозначает жесткость, а Er обозначает эффективный модуль упругости.
Еще один аспект настоящего изобретения предлагает способ определения остаточного напряжения с использованием инструментального индентирования, причем в указанном способе формулой для вычисления фактической глубины контакта индентора является формула  .
.
Еще в одном аспекте настоящего изобретения предлагается записываемый носитель информации, на котором записана компьютерная программа, включающая описанный выше способ инструментального индентирования.
Еще в одном аспекте настоящего изобретения предлагается устройство инструментального индентирования, предназначенное для выполнения инструментального индентирования путем выполнения записанной на записываемом носителе компьютерной программы, включающей описанный выше способ инструментального индентирования.
Технический результат
Вариант осуществления настоящего изобретения дает возможность определять остаточное напряжение в образце даже при отсутствии состояния без остаточного напряжения.
Краткое описание чертежей
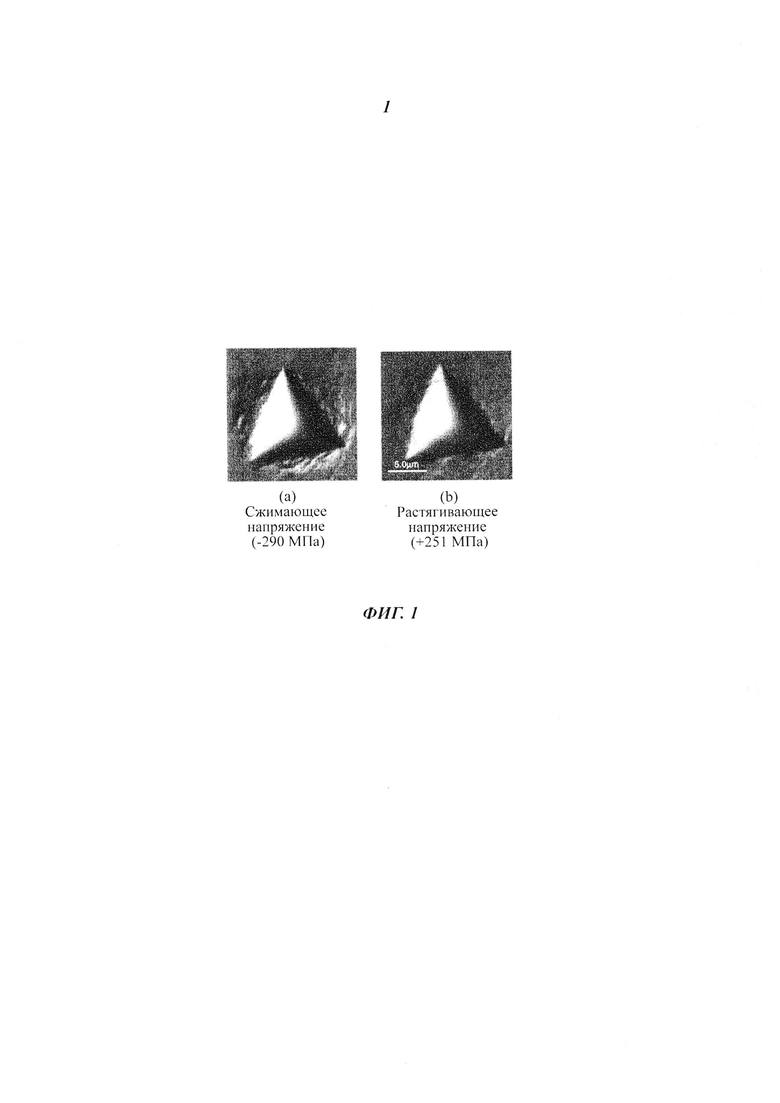
Фиг. 1 представляет зону контакта индентора в состоянии сжимающего остаточного напряжения и в состоянии растягивающего остаточного напряжения.
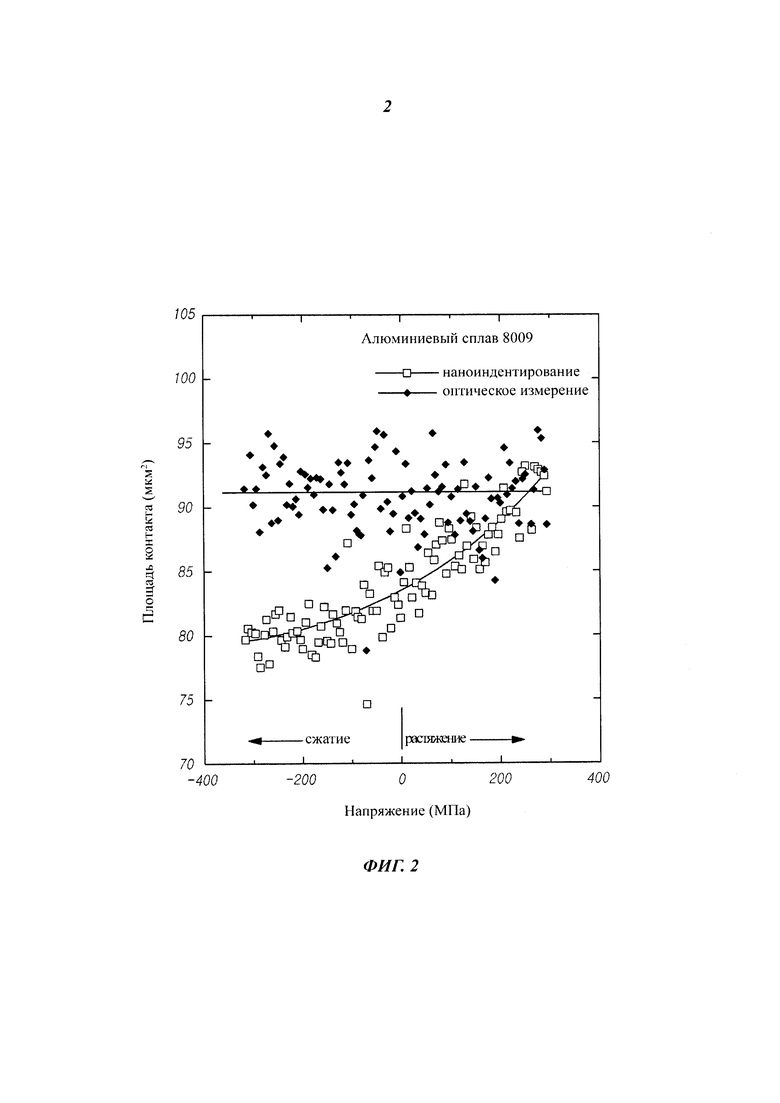
Фиг. 2 иллюстрирует независимость площади контакта индентора от остаточного напряжения.
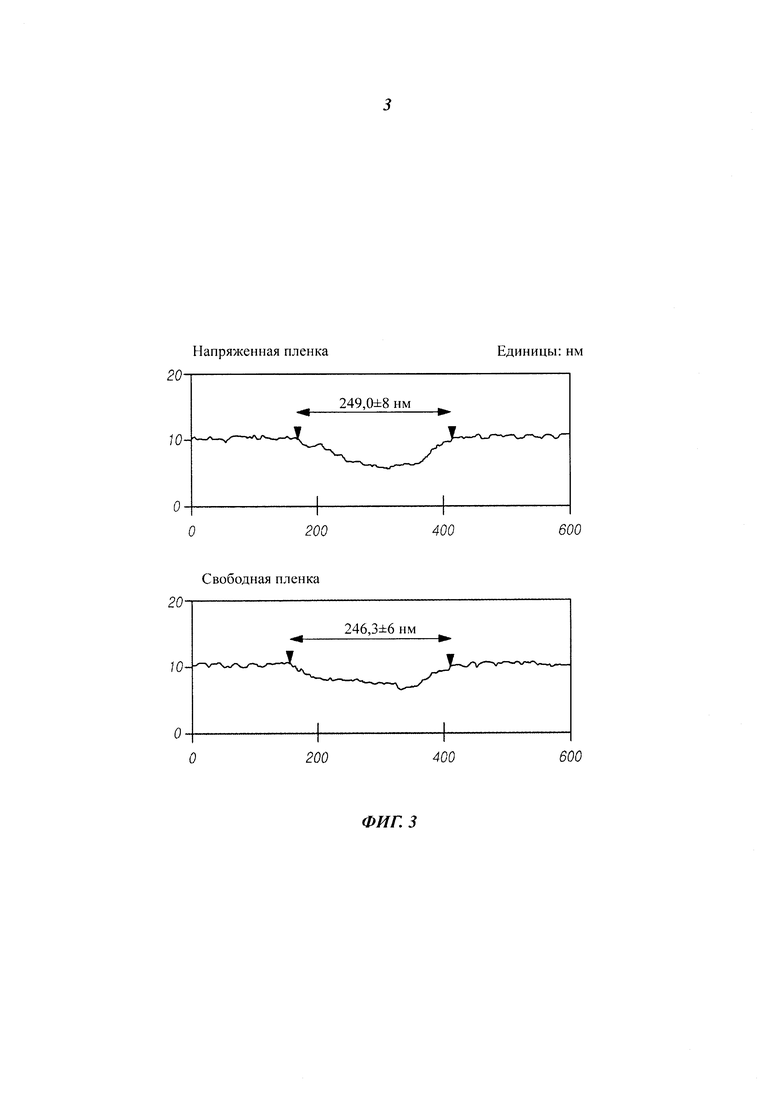
Фиг. 3 представляет сравнение фактических зон контакта инденторов для пленки в состоянии с остаточным напряжением и пленки в ненапряженном состоянии.
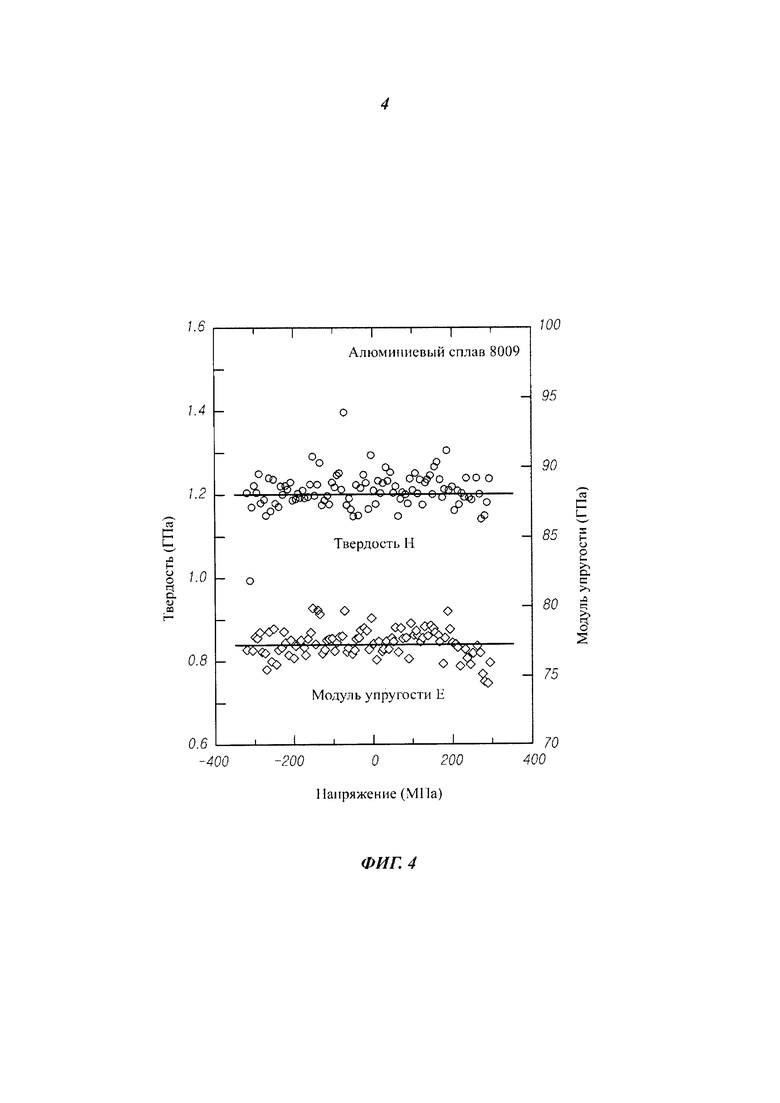
Фиг. 4 иллюстрирует инвариантность твердости и модуля упругости алюминиевого сплава 8009.
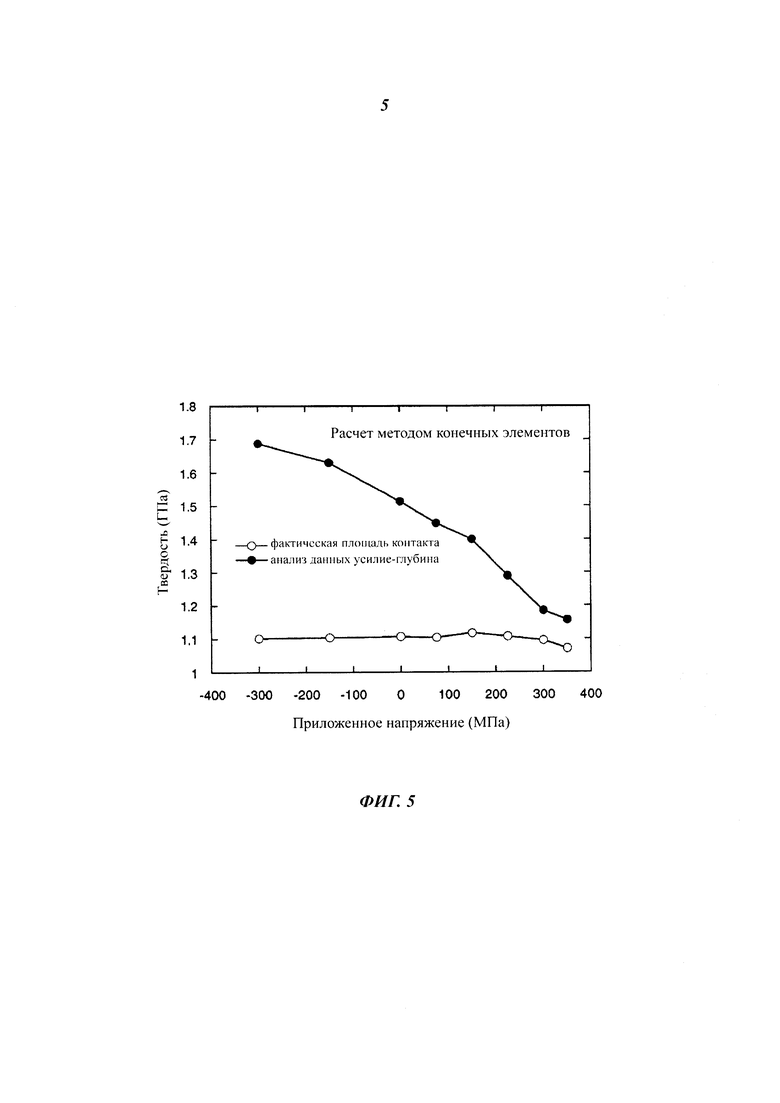
Фиг. 5 представляет график сравнения постоянной твердости, прогнозируемой способом конечно-элементного анализа, и твердости, вычисленной по кривой зависимости глубины вдавливания индентора от вдавливающего усилия.
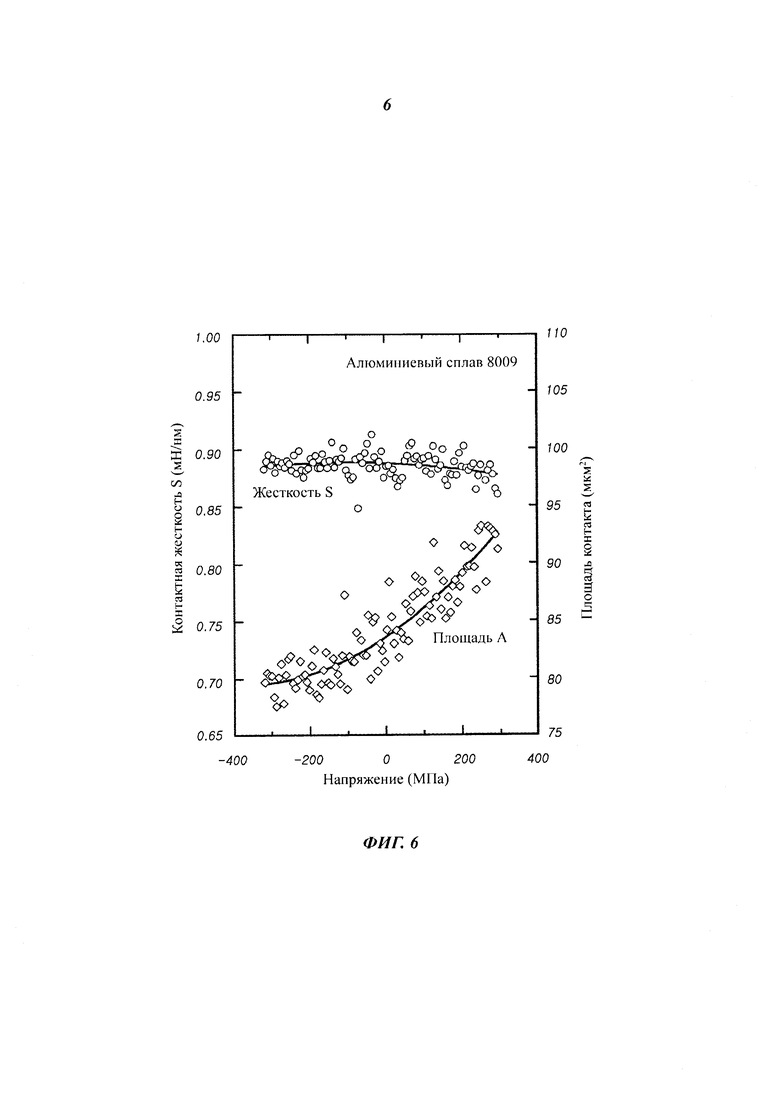
Фиг. 6 иллюстрирует инвариантность контактной жесткости алюминиевого сплава 8009.
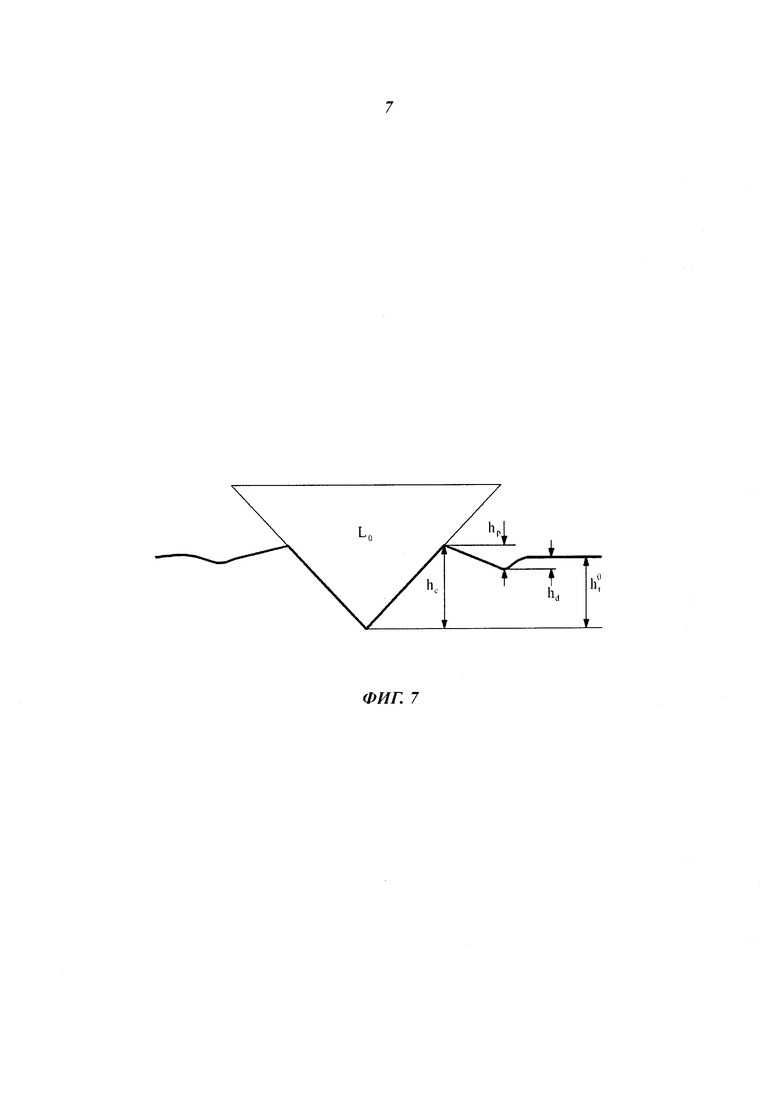
Фиг. 7 схематично представляет различные параметры индентирования.
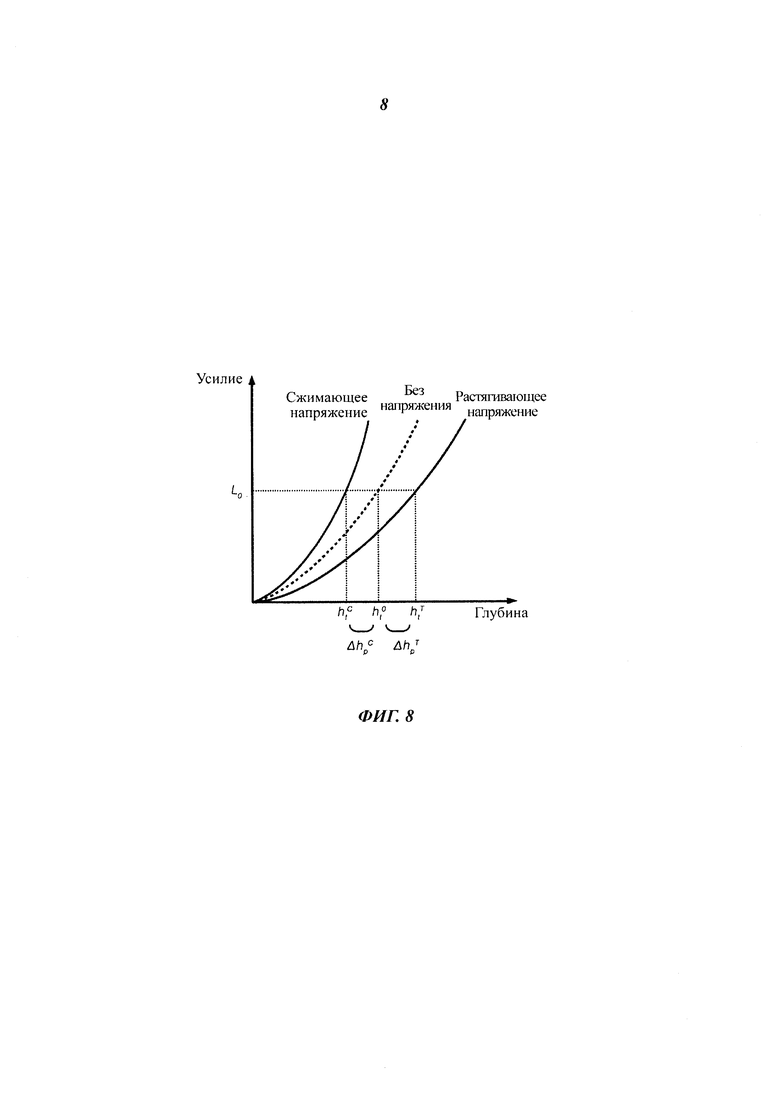
Фиг. 8 представляет график, изображающий величину наплыва, образующегося при различных остаточных напряжениях.
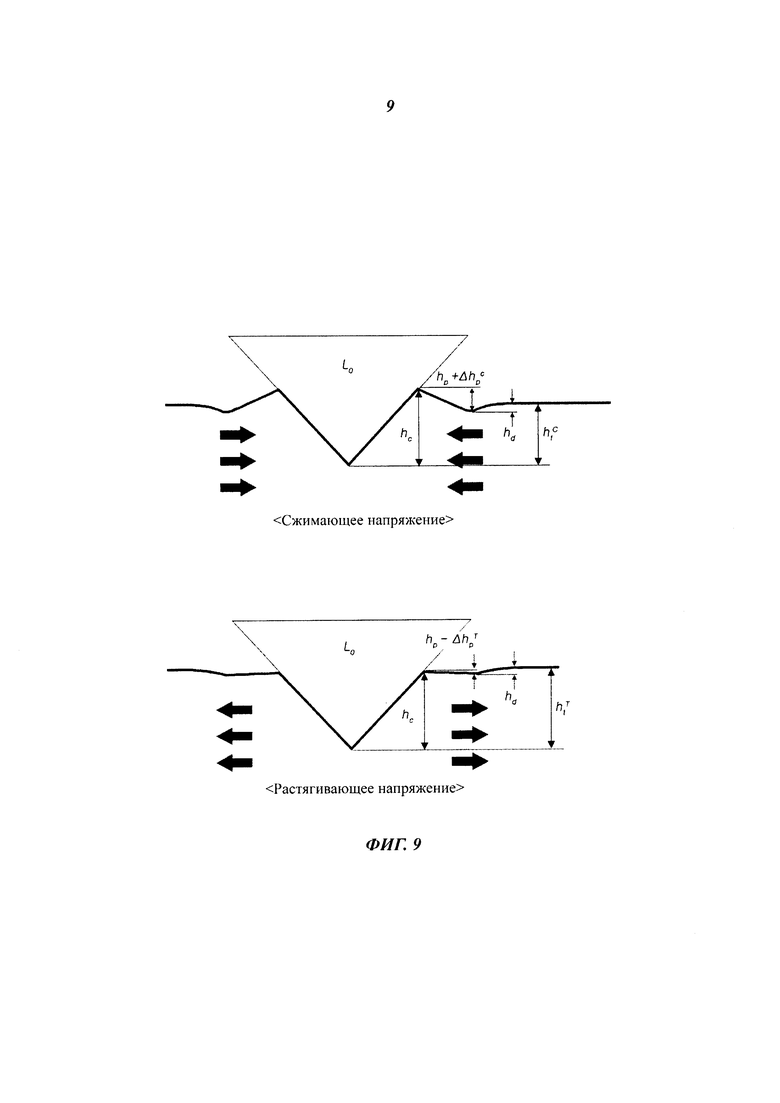
Фиг. 9 схематично иллюстрирует форму контакта индентора в условиях сжимающего остаточного напряжения и растягивающего остаточного напряжения.
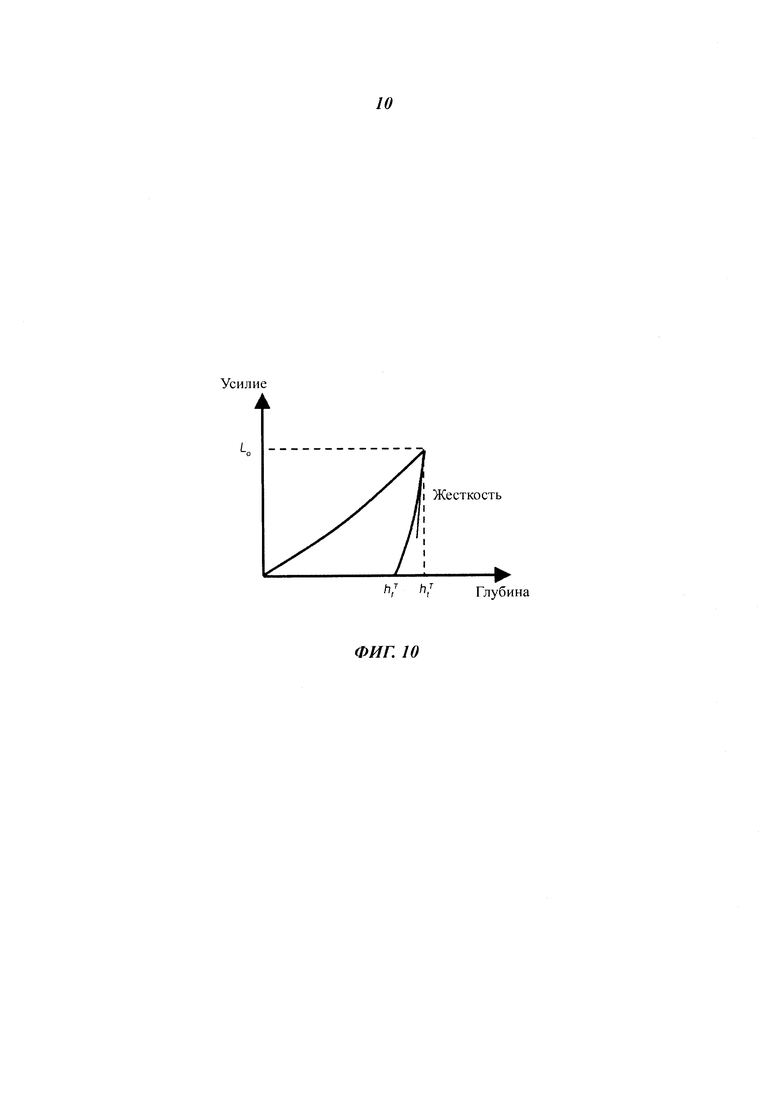
Фиг. 10 представляет график зависимости глубины вдавливания индентора от вдавливающего усилия в состоянии сжимающего остаточного напряжения.
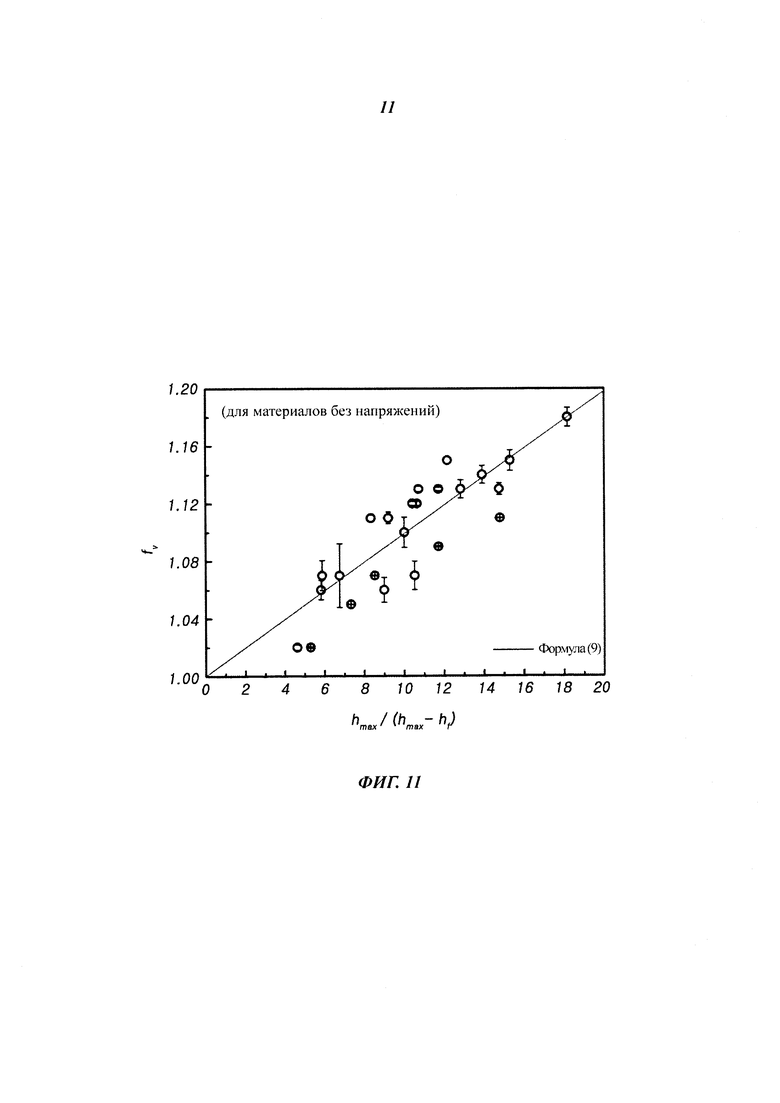
Фиг. 11 представляет взаимосвязь между фактической глубиной контакта и экспериментально измеренной глубиной вдавливания индентора.
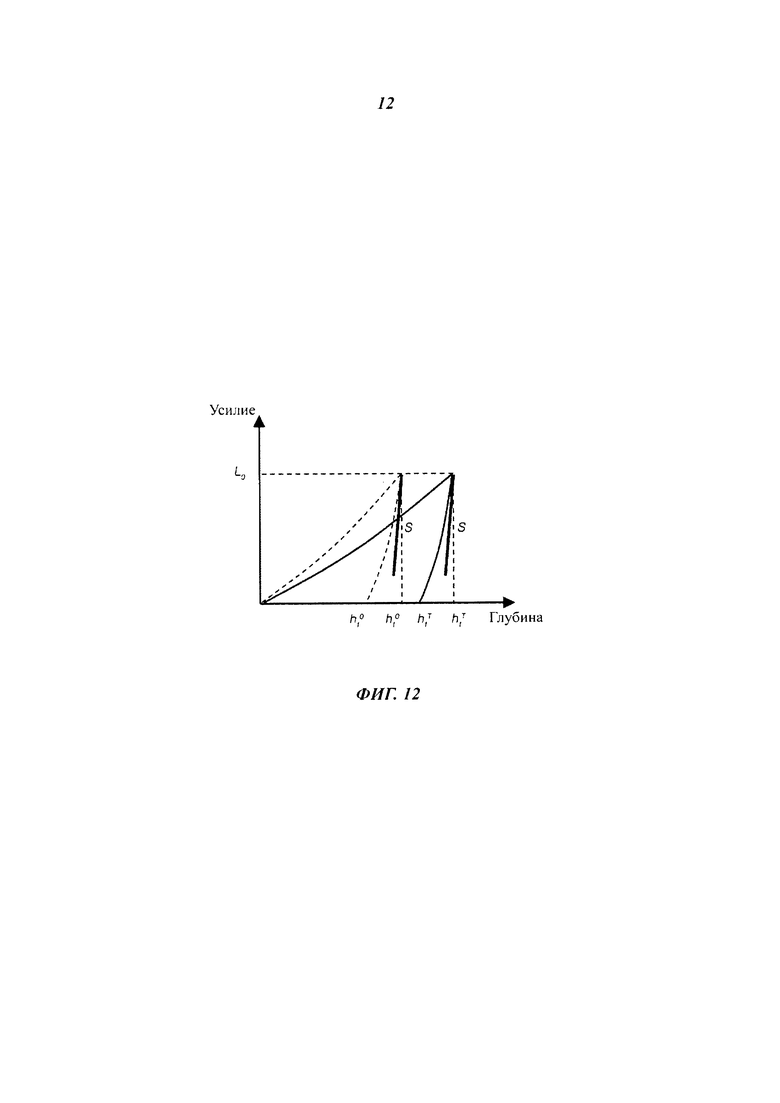
Фиг. 12 представляет график, показывающий, что при наличии остаточного напряжения разность между максимальной глубиной вдавливания индентора и результирующей глубиной отпечатка индентора постоянна вследствие инвариантности жесткости.
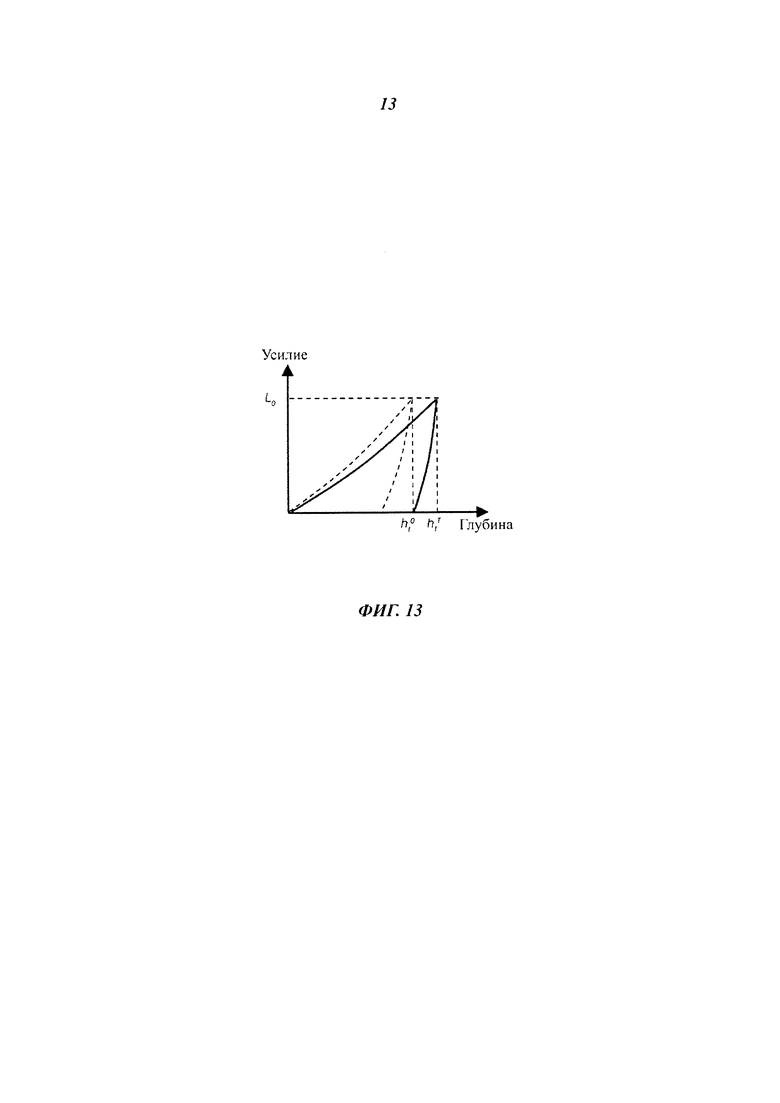
Фиг. 13 представляет график, на котором сравнивается максимальная глубина вдавливания индентора в состоянии растягивающего остаточного напряжения и максимальная глубина вдавливания индентора в ненапряженном состоянии.
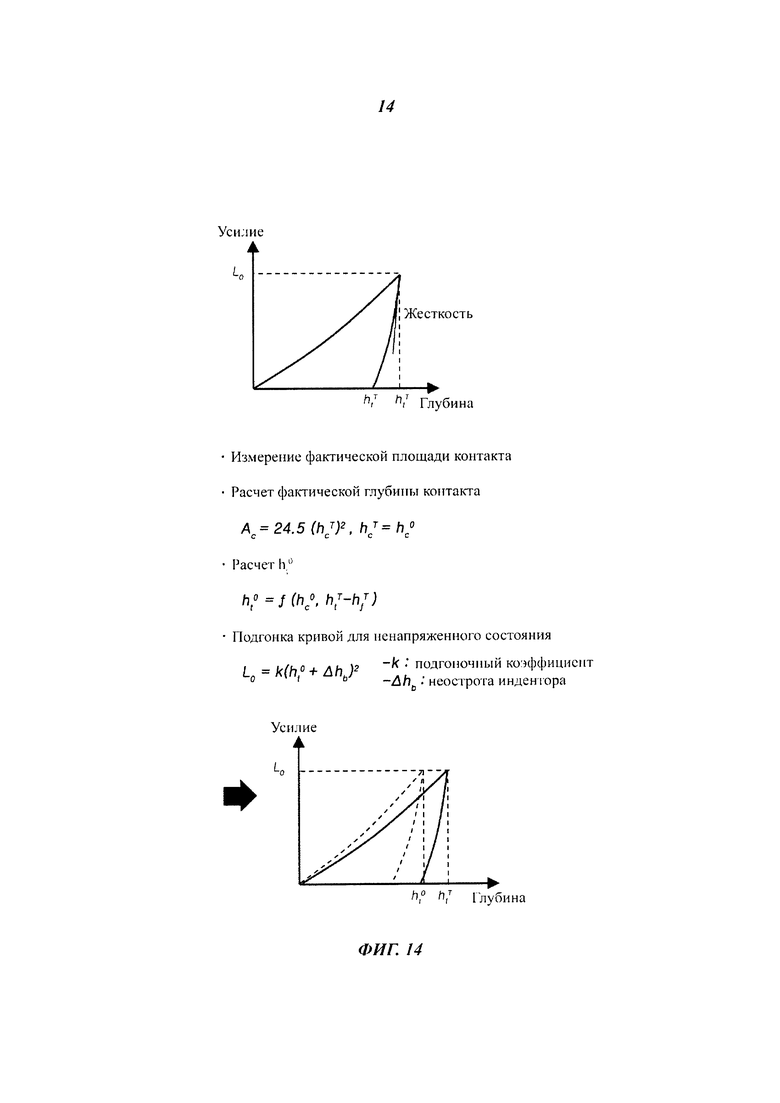
Фиг. 14 представляет шаги отыскания ненапряженного состояния.
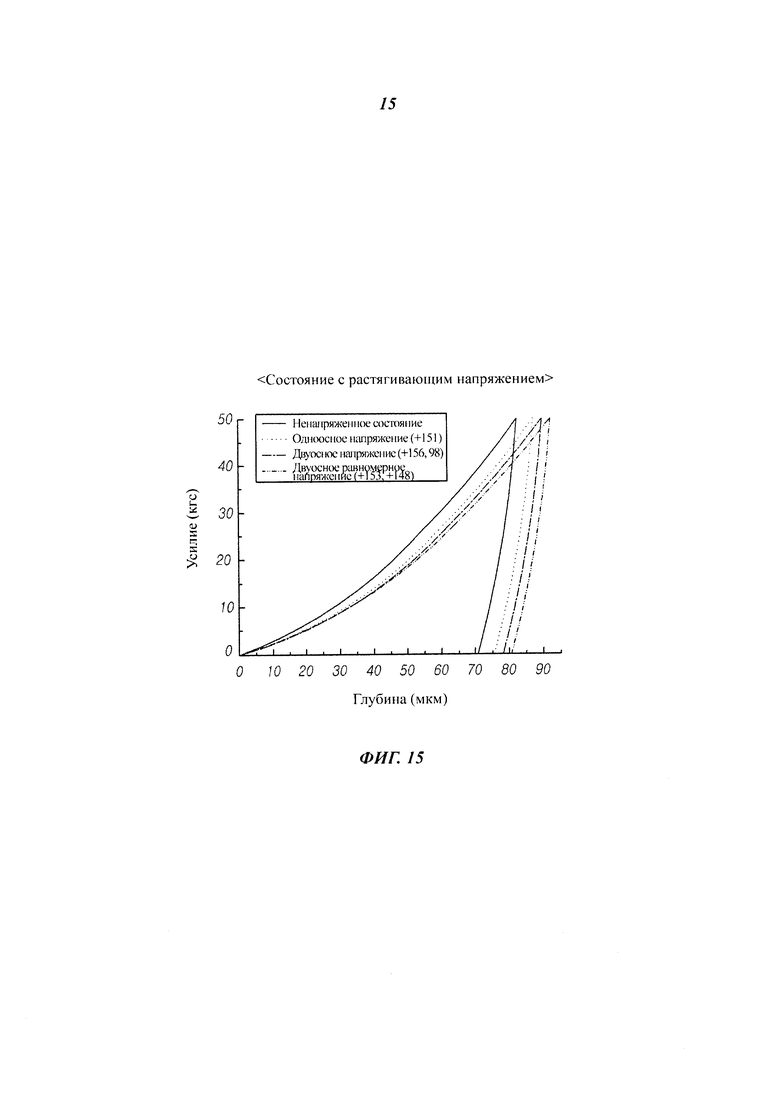
Фиг. 15 представляет график зависимости глубины вдавливания индентора от вдавливающего усилия в состояниях с различными растягивающими остаточными напряжениями.
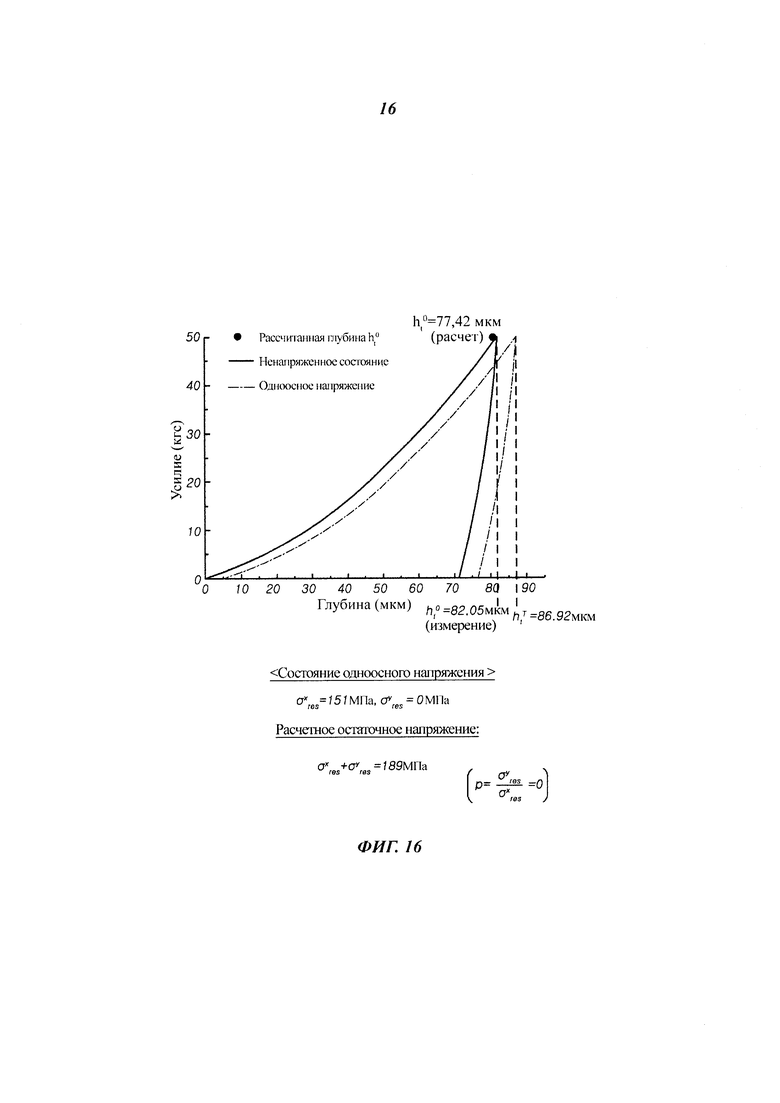
Фиг. 16 представляет зависимость глубины вдавливания индентора от вдавливающего усилия и остаточное напряжение в состоянии с одноосным растягивающим остаточным напряжением.
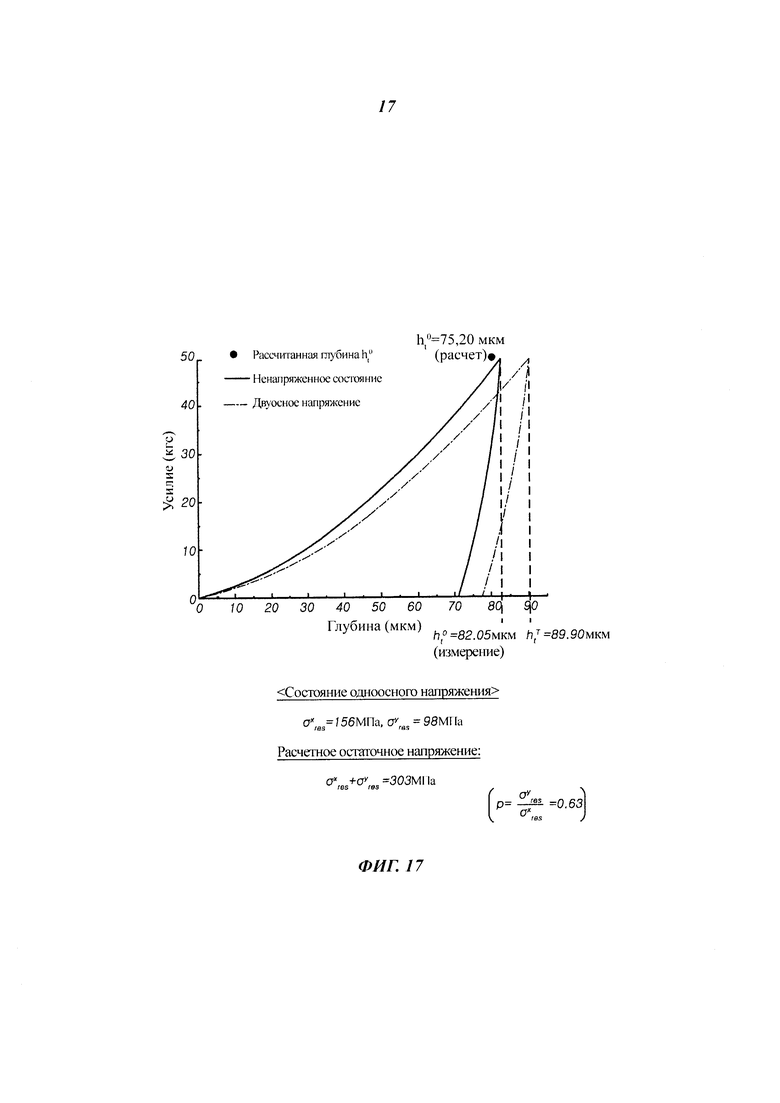
Фиг. 17 представляет зависимость глубины вдавливания индентора от вдавливающего усилия и остаточное напряжение в состоянии с двуосным растягивающим остаточным напряжением.
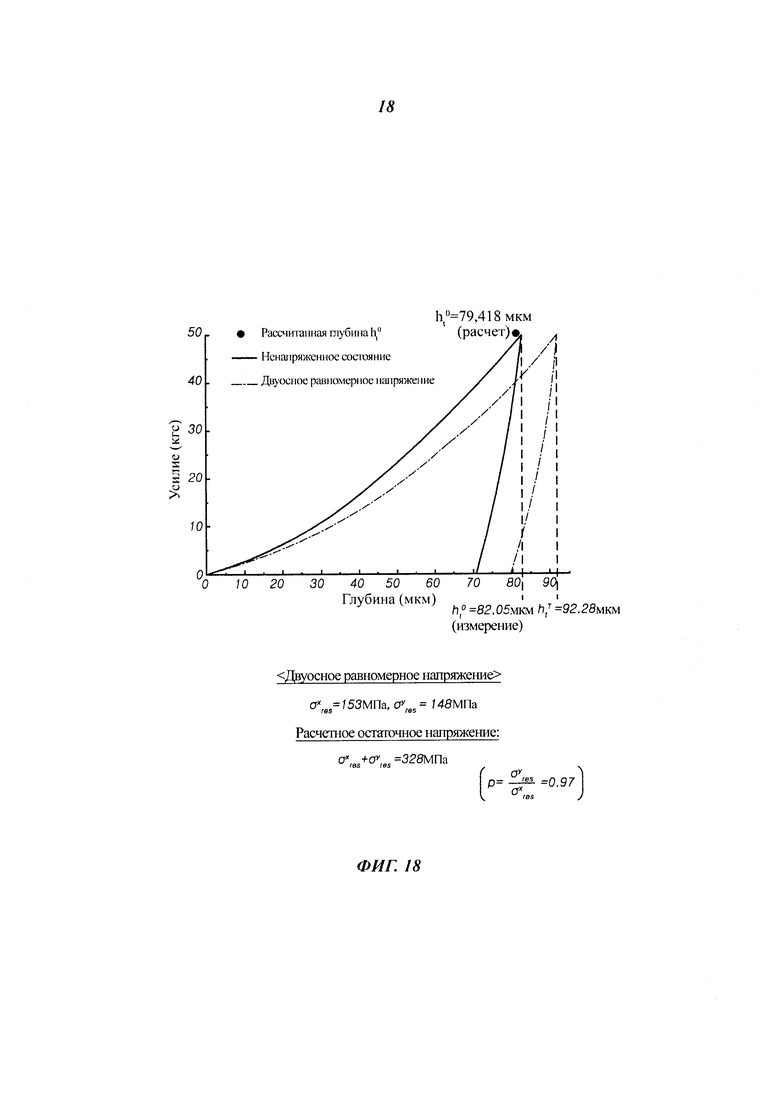
Фиг. 18 представляет зависимость глубины вдавливания индентора от вдавливающего усилия и остаточное напряжение в состоянии с двуосным растягивающим остаточным напряжением, величина которого одинакова во всех направлениях.
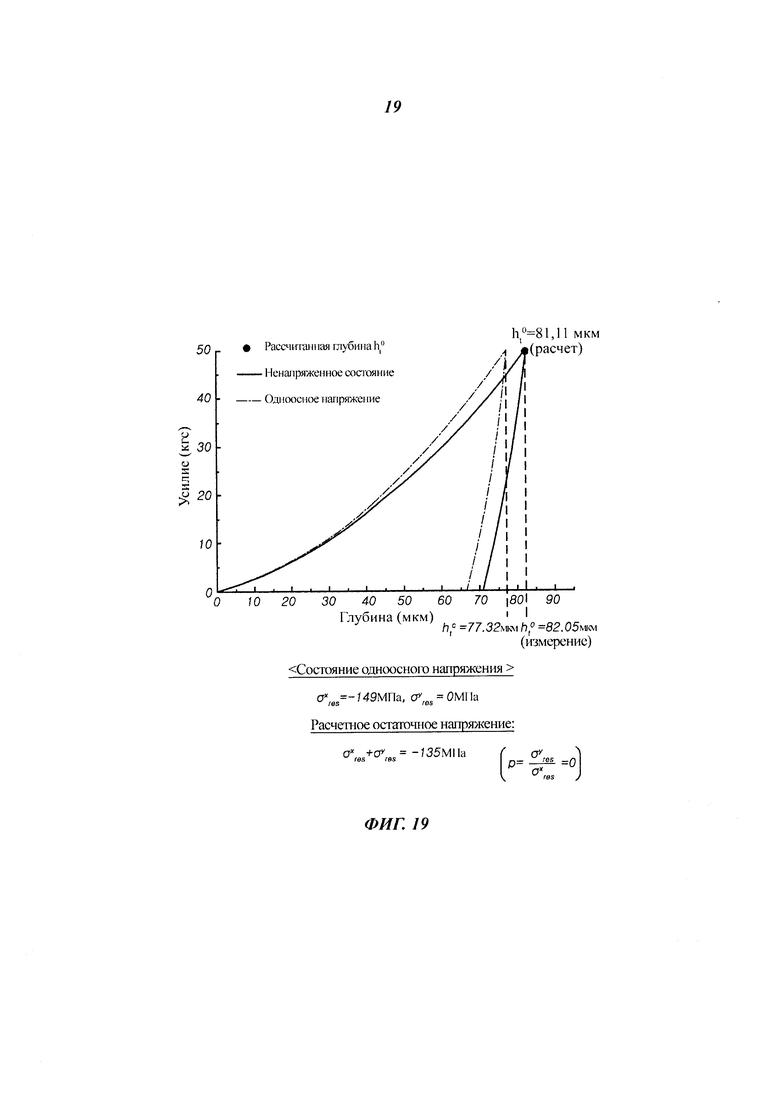
Фиг. 19 представляет зависимость глубины вдавливания индентора от вдавливающего усилия и остаточное напряжение в состоянии с одноосным растягивающим остаточным напряжением.
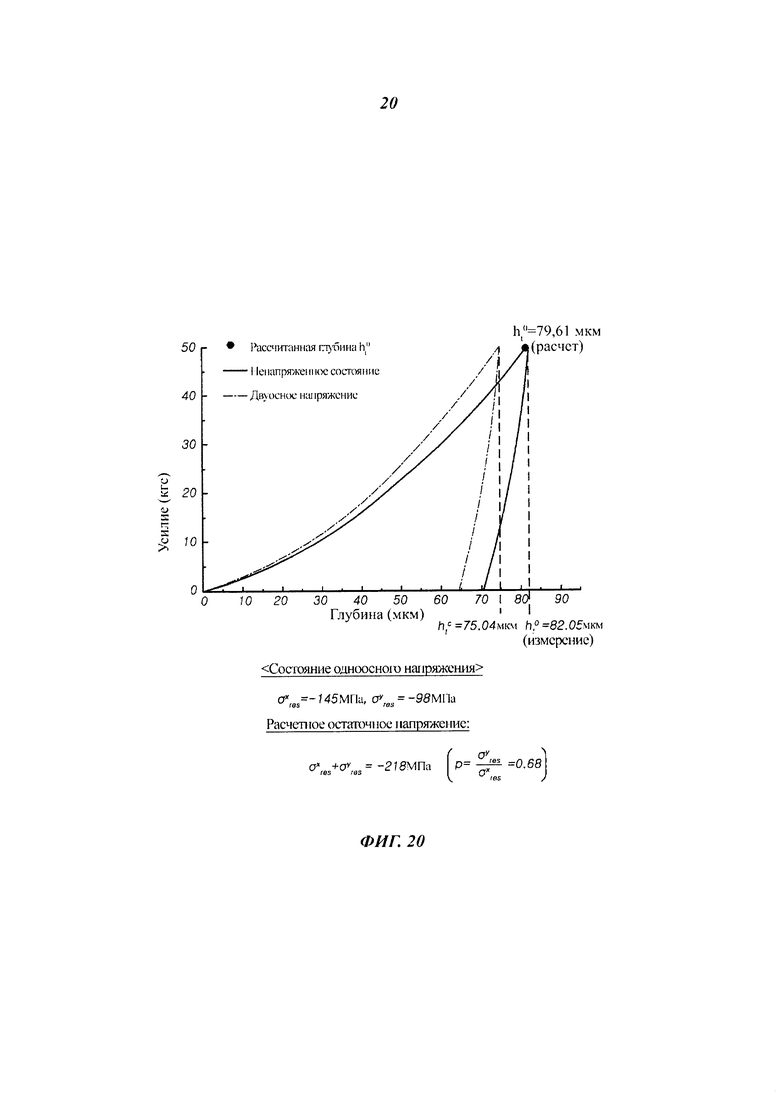
Фиг. 20 представляет зависимость глубины вдавливания индентора от вдавливающего усилия и остаточное напряжение в состоянии с двуосным сжимающим остаточным напряжением.
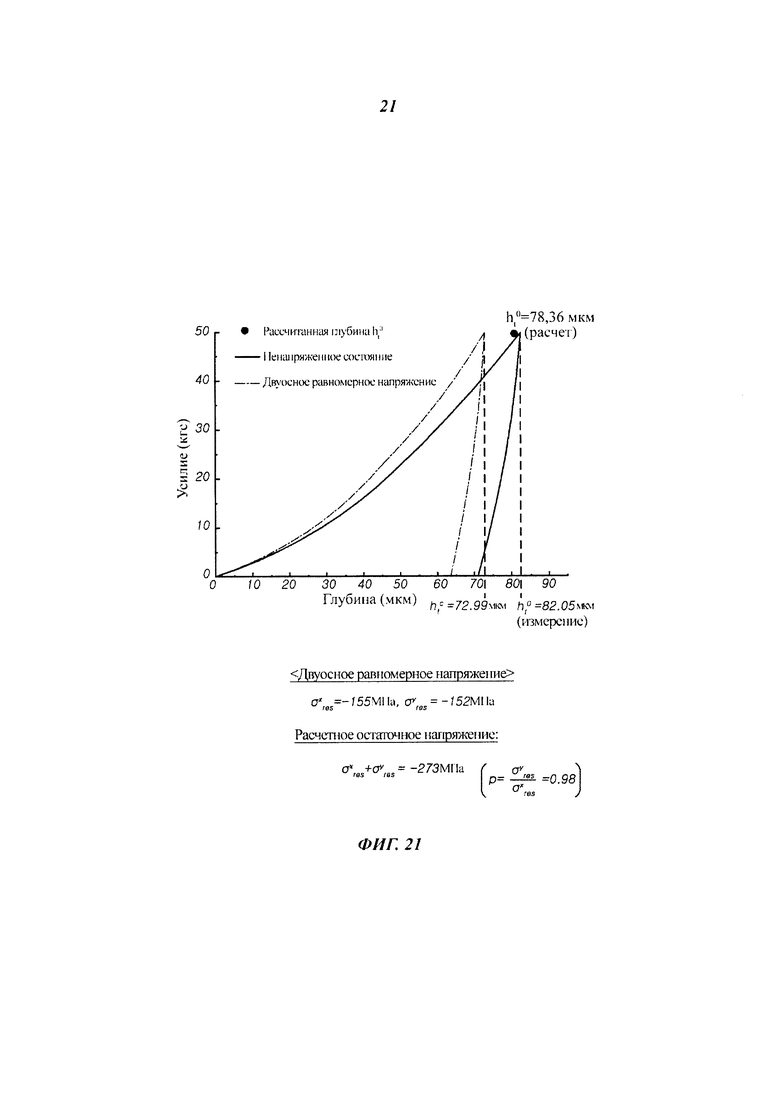
Фиг. 21 представляет зависимость глубины вдавливания индентора от вдавливающего усилия и остаточное напряжение в состоянии двуосного сжимающего остаточного напряжения.
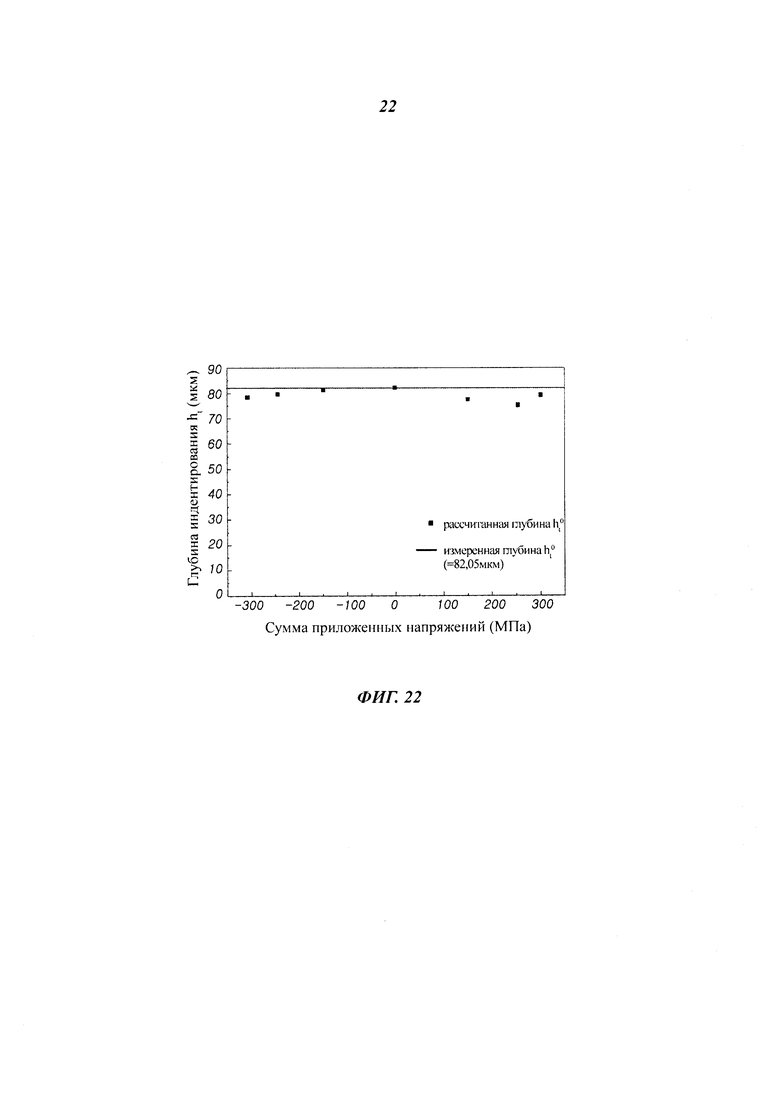
Фиг. 22 представляет график, изображающий сравнение величины  , спрогнозированной для состояний с различными остаточными напряжениями, и величиной , измеренной в ненапряженном состоянии.
, спрогнозированной для состояний с различными остаточными напряжениями, и величиной , измеренной в ненапряженном состоянии.
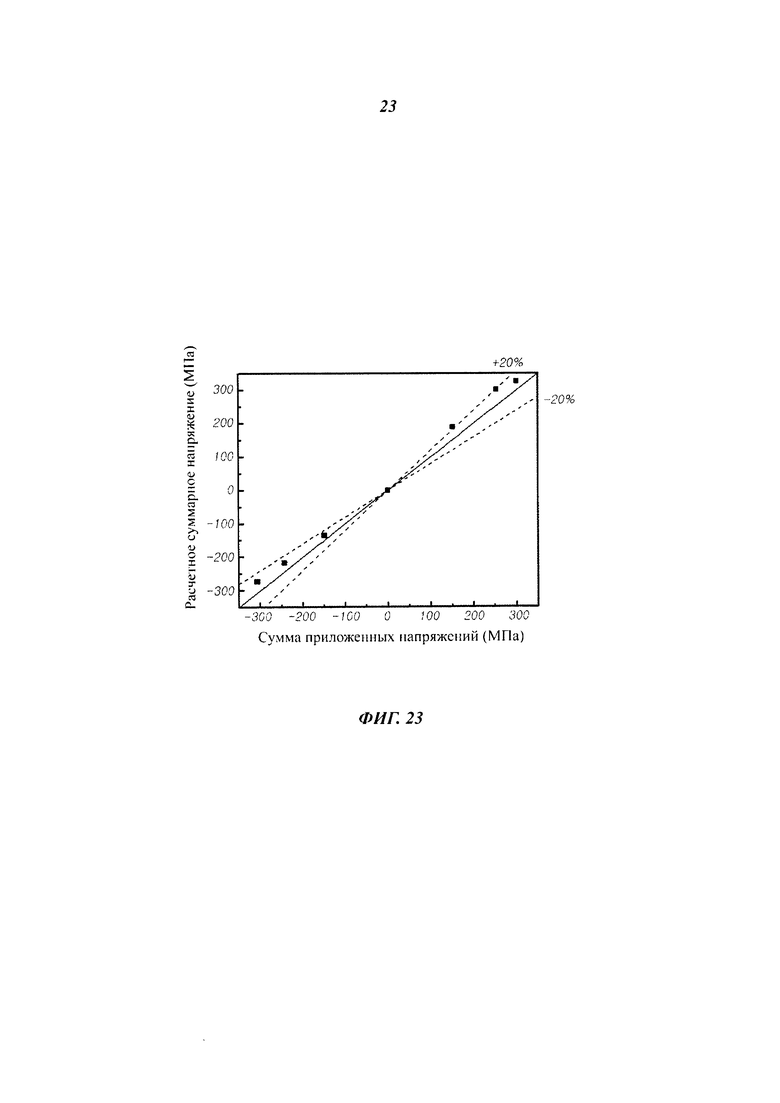
Фиг. 23 представляет график, изображающий сравнение суммы напряжений, спрогнозированных для состояния с различными остаточными напряжениями, и приложенных напряжений.
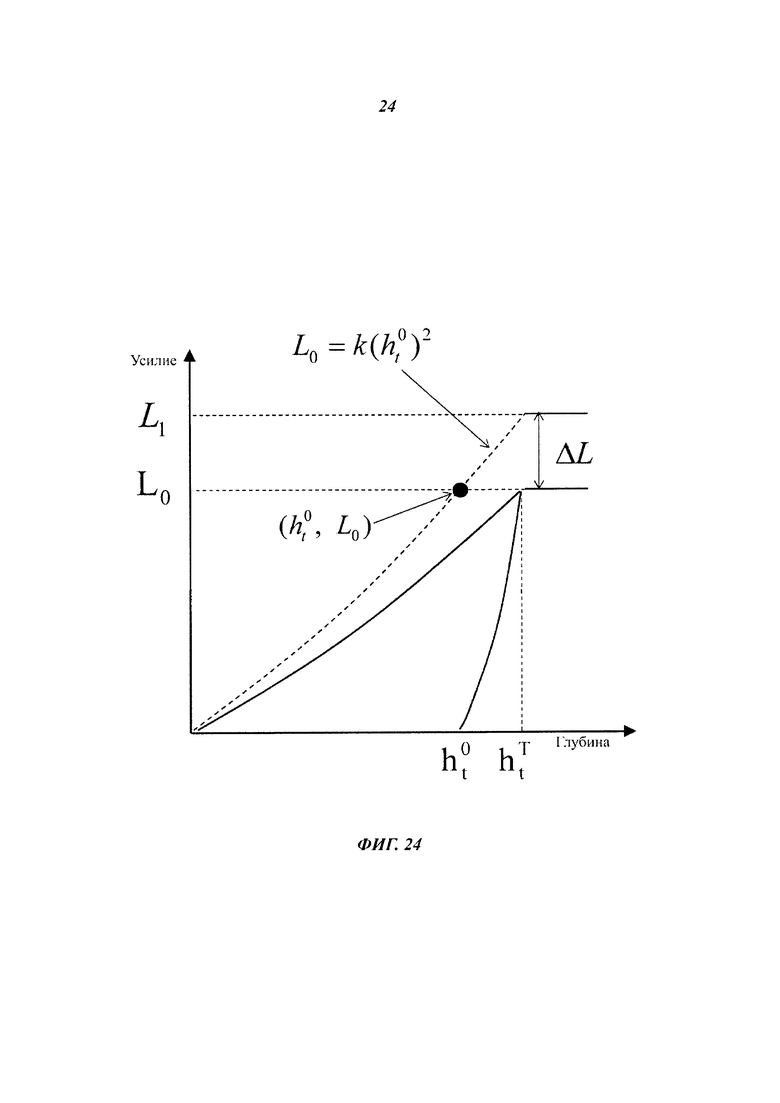
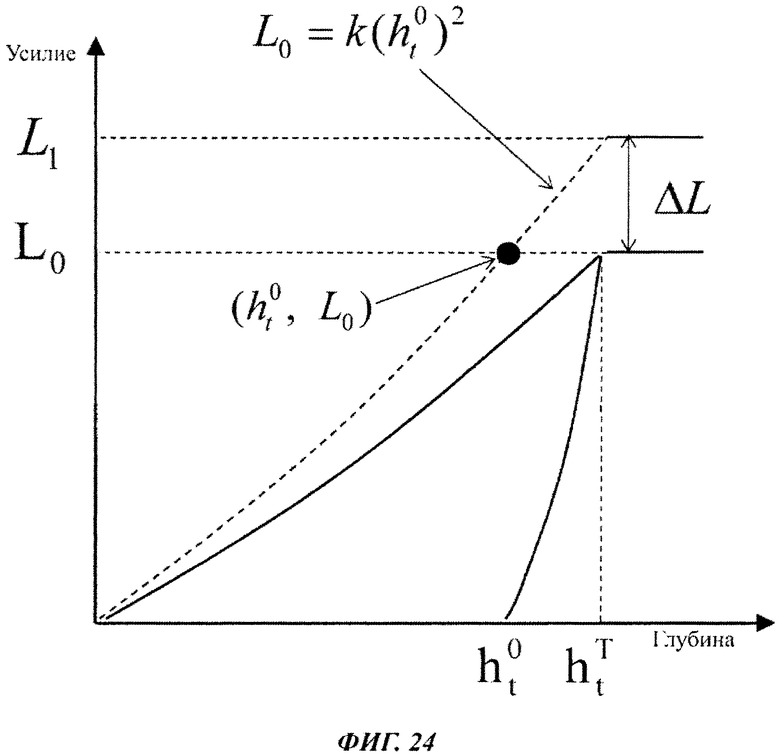
Фиг. 24 в одной системе координат представляет график зависимости глубины вдавливания индентора от вдавливающего усилия в ненапряженном состоянии, полученной по формуле (17), и график зависимости глубины вдавливания индентора от вдавливающего усилия в состоянии с растягивающим остаточным напряжением.
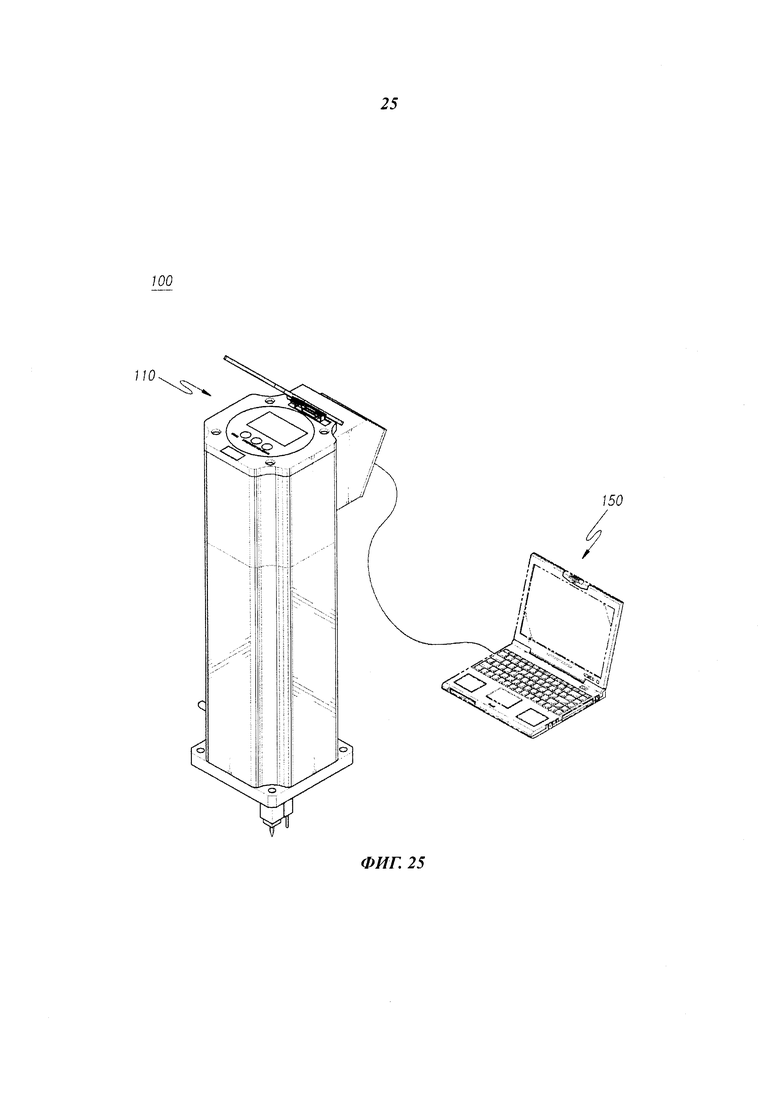
Фиг. 25 представляет аксонометрический вид устройства инструментального индентирования, предназначенного для выполнения инструментального индентирования в соответствии с настоящим изобретением.
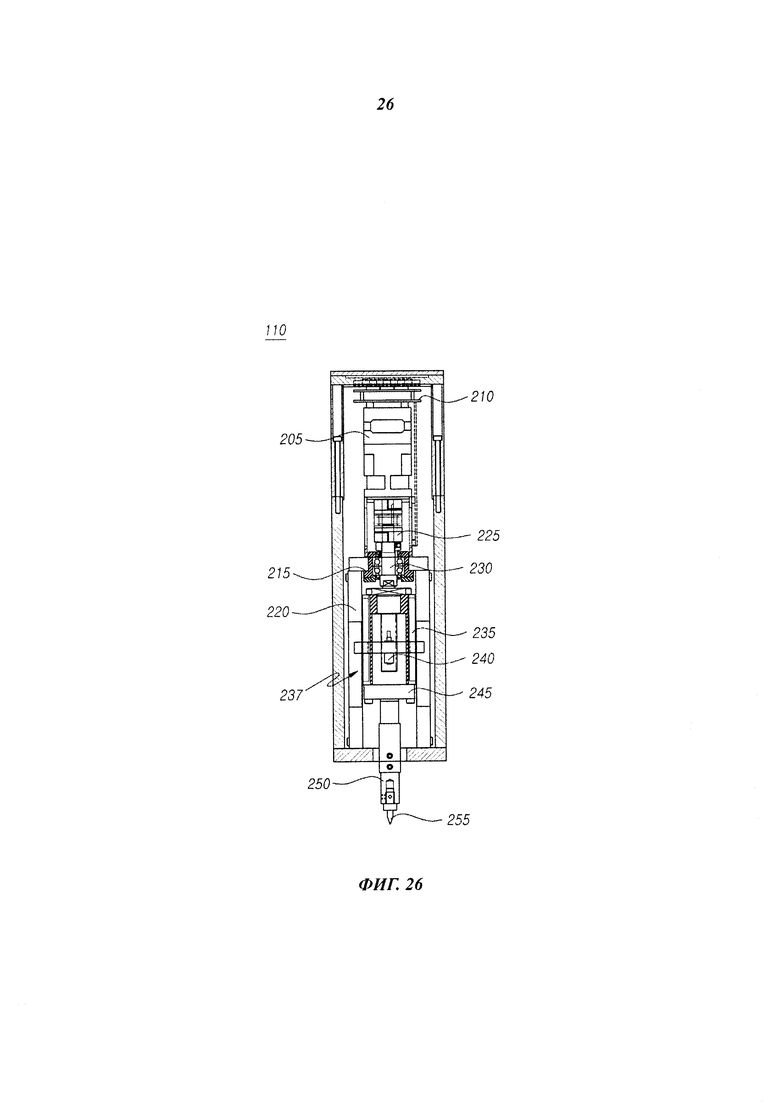
Фиг. 26 и 27 представляют корпус устройства инструментального индентирования в разрезе.
Осуществление изобретения
Далее со ссылкой на сопровождающие чертежи подробно описываются варианты осуществления настоящего изобретения. При этом одни и те же компоненты, если они показаны на разных чертежах, имеют одинаковые ссылочные обозначения. Кроме того, в описании настоящего изобретения не приводится подробное описание известных функциональных модулей и конфигураций, содержащихся в изобретении, если такое описание может скорее затруднить понимание сущности настоящего изобретения.
При описании компонентов настоящего изобретения могут использоваться такие понятия, как, например, «первый», «второй», А, В, (а), (b) и т.п. Эти обозначения используются лишь для того, чтобы отличить один структурный элемент от других структурных элементов, а свойство, порядок, последовательность и т.п. соответствующего структурного элемента указанным обозначением не ограничиваются. Следует отметить, что если в настоящем раскрытии изобретения указано, что один компонент соединен или иным образом связан с другим компонентом, то между первым и вторым компонентом может быть присоединен или иным образом введен третий компонент, хотя возможно и непосредственное соединение или иная связь первого компонента со вторым компонентом.
Эксперимент
Инструментальное индентирование выполнялось с использованием системы AIS 3000 и индентора Виккерса. Использованными для измерений материалами были API Х65. Для искусственного создания одноосного напряжения, двуосного напряжения и напряжения, величина которого одинакова во всех направлениях, использовалась напрягающая оснастка. Перед искусственным созданием напряжений при ненапряженном состоянии образца выполнялось инструментальное индентирование с целью сравнения максимальных глубин индентирования в ненапряженном состоянии (т.е. в состоянии без остаточного напряжения), полученных из фактической эталонной кривой, и значения, полученного приближенным вычислением.
индентирования в ненапряженном состоянии (т.е. в состоянии без остаточного напряжения), полученных из фактической эталонной кривой, и значения, полученного приближенным вычислением.
Затем выполнялось инструментальное индентирование образца с остаточным напряжением с последующим оптическим измерением отпечатков индентора. Далее проверялась модель, разработанная для приближенного вычисления остаточного напряжения с использованием измеренной площади контакта индентора и параметров отпечатка в состоянии с остаточным напряжением и для оценки ненапряженного состояния путем сравнения искусственно созданного остаточного напряжения с оцененным остаточным напряжением.
Далее описывается вышеупомянутая система AIS 3000 (в дальнейшем называемая устройством инструментального индентирования).
Как показано на фиг. 25-27, устройство 100 инструментального индентирования содержит приводное устройство 205, установленное внутри корпуса 110 устройства инструментального индентирования; винт 230 шариковой винтовой передачи, с возможность вращения соединенный с валом приводного устройства 205; гайку 215 шариковой винтовой передачи, соединяемую с винтом 230 шариковой винтовой передачи с использованием шариков; ползун 237, содержащий цилиндр 235, установленный с возможностью перемещения вдоль вала вращения, сопряженный и соединенный с гайкой 215; направляющую 220 ползуна, в которую вставляется ползун 237, соединенную с корпусом 110 устройства инструментального индентирования, служащую для обеспечения направленного перемещения ползуна 237; индентор 255, посредством держателя 250 индентора, выполненного с возможностью сопряжения с ползуном 237, соединенный с нижней стороной ползуна 237 и предназначенный для приложения вдавливающего усилия к испытываемому образцу; датчик 245 усилия, соединенный с нижней стороной цилиндра 235 и предназначенный для измерения усилия, передаваемого от индентора 255 к испытываемому образцу при перемещении ползуна 237; датчик перемещения, предназначенный для измерения глубины вдавливания индентора 255 в испытываемый образец при перемещении ползуна 237; микрокомпьютер 210, установленный внутри корпуса 110 устройства инструментального индентирования, соединенный с приводным устройством 205 через интерфейс и автономно управляющий приводным устройством 205 с использованием управляющей программы, переданной из основного компьютера 150; и основной компьютер 150, посредством проводной или беспроводной связи соединенный с микрокомпьютером 210 с целью передачи управляющей программы с запрограммированными в ней условиями испытания, вычисляющий остаточное напряжение в испытываемом образце с использованием значений, измеренных датчиком 245 усилия и датчиком перемещения, и осуществляющий управление, в котором в микрокомпьютер передается сигнал прерывания испытания или отключается подача питания на приводное устройство 205, если значения, измеренные датчиком 245 усилия и датчиком перемещения, отклоняются от эталонного значения.
Приводное устройство 205 установлено внутри корпуса 110 устройства инструментального индентирования и выполнено с возможностью вертикального перемещения ползуна 237 и индентора 255, соединенного с держателем 250 индентора. При этом используется шаговый двигатель постоянного тока, который устойчив к внешней нагрузке и перегрузке, дает возможность управления с высокой точностью и может снизить влияние опасных факторов, например внешних вибраций, которые могут возникать в месте инструментального индентирования.
С приводным устройством 205 соединен редуктор, снижающий скорость движения индентора 255 до требуемой величины и повышающий усилие при перемещении индентора 255 за счет мощности двигателя.
Ползун 237 содержит: винт 230 шариковой винтовой передачи, с возможность вращения соединенный с валом приводного устройства 205 соединителем 225; гайку 215 шариковой винтовой передачи, соединяемую с винтом 230 шариковой винтовой передачи с использованием шариков; и цилиндр 235, установленный с возможностью перемещения вдоль вала вращения, сопряженный и соединенный с гайкой 215.
Таким образом, при работе приводного устройства 205 вращается винт 230 шариковой винтовой передачи, соединенный с валом приводного устройства 205, при этом гайка 215 шариковой винтовой передачи, соединенная с винтом 230 посредством шариков, вследствие этого вращения вертикально перемещается вдоль оси вращения винта 230, и вместе с гайкой 215 вертикально перемещается цилиндр 235, специально для этого соединенный с нижней стороной гайки 215 посредством соединительного элемента и т.п.
Направляющая 220 ползуна, служащая для удержания цилиндра 235 при его вертикальном движении, расположена с наружной стороны ползуна 237 (что дает возможность вставить ползун 237 в направляющую 220), направляет вертикальное движение ползуна 237 и жестко соединена с корпусом 110 устройства инструментального индентирования.
Наибольшее перемещение цилиндра 235 по вертикали ограничивается ограничивающим датчиком 240, установленным внутри цилиндра 235, тем самым в случае нештатной работы приводного устройства 205 или при ручном перемещении цилиндра 235 перемещение цилиндра ограничивается с целью защиты устройства инструментального индентирования.
Индентор 255, предназначенный для приложения вдавливающего усилия к испытываемому образцу при своем вертикальном перемещении в ходе работы приводного устройства 205, соединен с нижней стороной ползуна 237 посредством держателя 250 индентора, предназначенного для взаимного соединения с ползуном 237, а датчик 245 усилия, предназначенный для измерения усилия, передаваемого к испытываемому образцу индентором 255, соединен с нижней стороной цилиндра 235.
В качестве индентора 255 здесь использован индентор Виккерса.
Датчик перемещения, предназначенный для измерения глубины вдавливания индентора 255 в испытываемый образец при перемещении ползуна 237, прикреплен к корпусу 260 устройства инструментального индентирования; держатель 265 датчика, удерживающий наконечник 260 датчика, перемещающийся вместе с индентором 255 в ходе вертикального перемещения индентора 255, расположен на боковой поверхности держателя 250 индентора; а основной модуль 270 датчика, служащий для измерения вертикального перемещения наконечника 260 датчика, закреплен внутри корпуса 110 устройства инструментального индентирования и соединяется с основным компьютером 150 через интерфейс.
Микрокомпьютер 210, служащий для автономного управления приводным устройством 205 с использованием управляющей программы, обеспечивающей выполнение инструментального индентирования и передаваемой из основного компьютера 150, установлен внутри корпуса устройства инструментального индентирования и соединен с приводным устройством 205 через интерфейс, обеспечивая тем самым проведение индентирования в соответствии с заранее переданными условиями испытания даже в тех случаях, когда программы, установленные в основном компьютере 150, не выполняются должным образом.
Основной компьютер 150 посредством проводной или беспроводной связи соединен с микрокомпьютером 210 с целью передачи управляющей программы (то есть компьютерной программы, содержащей способ измерения остаточного напряжения с использованием инструментального индентирования, описанный выше, записанной на записываемом носителе информации и имеющейся в основном компьютере 150), в которой запрограммированы условия испытания, и вычисляет остаточное напряжение в испытываемом образце с использованием значений, измеренных датчиком усилия 235 и датчиком перемещения.
Оснастка (не показана) для крепления испытываемого образца может быть прикреплена к нижней стороне устройства 100 для инструментального индентирования, внутри которого находится микрокомпьютер 210. При этом испытание может выполняться с использованием в качестве указанной оснастки по меньшей мере одного из следующих элементов: V-образного блока, U-образного блока, цепи, плоского магнита, двойного изогнутого магнита, плоского электромагнита, изогнутого электромагнита.
Пример практического определения остаточного напряжения
В испытываемом образце с целью определения растягивающего остаточного напряжения с использованием разработанной модели были искусственно созданы остаточные напряжения: одноосное, двуосное и двуосное с одинаковой во всех направлениях величиной. Было выполнено инструментальное индентирование в состоянии без остаточного напряжения и в каждом из состояний с растягивающим остаточным напряжением, в результате чего получены кривые зависимости глубины вдавливания индентора от вдавливающего усилия, как показано на фиг. 15. Остаточные напряжения определялись с использованием параметров индентирования, полученных по кривой для состояния с остаточным напряжением, и оптически измеренной площади контакта индентора. На фиг. 16-18 показаны найденные значения остаточного напряжения в состояниях с одноосным, двуосным и двуосным с одинаковой во всех направлениях величиной растягивающим остаточным напряжением, а на фиг. 19-21 показаны найденные значения остаточного напряжения в состояниях с одноосным, двуосным и двуосным с одинаковой во всех направлениях величиной сжимающим остаточным напряжением. Все полученные значения собраны воедино на фиг. 22 и 23, и сделан вывод о том, что значения, вычисленные с использованием данной модели, в значительной мере совпадают с фактически измеренными значениями.
Инвариантное свойство, не зависящее от остаточного напряжения
Твердость в месте индентирования определяется по изменению кривой зависимости глубины вдавливания индентора от вдавливающего усилия в соответствии с остаточным напряжением в образце: это напряжение сдвигает указанную кривую согласно своим направлению и величине. Однако было показано, что изменение фактически измеряемой твердости в месте индентирования в результате изменения остаточного напряжения является следствием некорректного оптического измерения отпечатка индентора (T.Y. Tsui, W.C. Oliver, G.M. Pharr, J. Mater. Res. 11, 752 (1996), A. Bolshakov, W.C. Oliver, G.M. Pharr, J. Mater. Res. 11, 760 (1996)).
В исследовании влияния плоского остаточного напряжения на пластичность зоны индентирования, в котором изучалась зависимость глубины вдавливания индентора от вдавливающего усилия и форма отпечатков индентора, было установлено, что контактная твердость не зависит от приложенного упругого напряжения. В испытаниях способа управления усилием, проводившихся вплоть до максимального вдавливающего усилия, остаточное напряжение меняло кривую зависимости глубины вдавливания индентора от вдавливающего усилия. В то же время по данным оптического измерения фактическая площадь контакта индентора не зависит от остаточного напряжения. Tsui с соавторами (T.Y. Tsui, W.C. Oliver, G.M. Pharr, J. Mater. Res. 11, 752 (1996)) исследовали фактически измеряемые площади контакта при сжимающем и растягивающем остаточном напряжении. При этом в обоих случаях получавшиеся отпечатки имели почти одинаковую площадь (см. фиг. 1). Кроме того, когда результат оптического измерения площади контакта индентора при индентировании в состояниях с различными остаточными напряжениями сравнивался с площадью контакта, вычисленной с использованием схемы Оливера-Фарра, эти площади контакта были сопоставимы независимо от состояния остаточного напряжения.
Далее, на пленке в состоянии с остаточным напряжением и в ненапряженном состоянии (состоянии, в котором нет остаточного напряжения) зоны контакта индентора независимо от остаточного напряжения имели близкие длины диагоналей (Y.H. Lee, D. Kwon, J. Mater. Res. 17, 901 (2002)) (см. фиг. 3).
Следовательно, фактическая площадь контакта индентора может быть принята в качестве инвариантной величины, которая при постоянном вдавливающем усилии не зависит от остаточного напряжения.
Постоянство площади контакта при постоянном вдавливающем усилии означает и постоянство твердости. Причина этого в том, что твердость определяется как отношение вдавливающего усилия к площади контакта. На фиг. 4 показаны полученные инвариантные значения твердости и коэффициента упругости. На основании результирующих значений, полученных способом конечно-элементного анализа (Finite Element Analysis, FEA), можно заключить, что искривления поверхности (наплыв), образующиеся вблизи места контакта в состоянии с остаточным напряжением, играют важную роль в том, что контактная твердость не зависит от остаточного напряжения (A. Bolshakov, G.M. Pharr, J. Mater. Res. 13, 1049 (1998), A. Bolshakov, W.C. Oliver, G.M. Pharr, J. Mater. Res. 11, 760 (1996)) (см. фиг. 5).
Жесткость определяется как функция коэффициента упругости и площади контакта. Здесь уже отмечалось, что эти два параметра не зависят от остаточного напряжения. Таким образом, в качестве инвариантного параметра может быть взята жесткость (см. фиг. 6).
Причина этого состоит в том, что свойства зоны индентирования, например твердость и контактная жесткость, являясь инвариантными, при одинаковом вдавливающем усилии имеют постоянные значения для фактической площади контакта, не зависящие от остаточного напряжения. Площадь контакта получают вычислением фактической глубины контакта с использованием пространственной формы остроконечного индентора, и поэтому необходимо установить причину, по которой глубина контакта не изменяется остаточным напряжением. Здесь расчет этой инвариантной глубины контакта основывается на морфологическом аспекте контакта при индентировании.
Когда индентор вдавливается в образец, материал образца, чтобы сохранить объем, смещается к свободной поверхности. Образующийся при этом наплыв увеличивает глубину контакта индентора, и фактическая глубина контакта (hc) индентора выражается следующим образом:

Здесь hmax обозначает максимальную глубину отпечатка индентора, которую измеряют в эксперименте, hd обозначает упругую деформацию, a hpile (=hp) обозначает пластический наплыв. Упругая деформация выражается следующим образом:
В случае остроконечного индентора пластический наплыв может быть выражен как функция твердости Н и коэффициента С упругости следующим образом:
Фиг. 7 представляет подробное пояснение смысла величин hmax, hd, hpile и hc. На фиг. 7 L0 обозначает приложенное вдавливающее усилие, a  обозначает максимальную глубину вдавливания индентора в состоянии без остаточного напряжения, измеряемую при приложении полного вдавливающего усилия. Параметр , показанный на чертеже, имеет тот же смысл, что и параметр hmax в представленных выше уравнениях.
обозначает максимальную глубину вдавливания индентора в состоянии без остаточного напряжения, измеряемую при приложении полного вдавливающего усилия. Параметр , показанный на чертеже, имеет тот же смысл, что и параметр hmax в представленных выше уравнениях.
Кривые зависимости глубины вдавливания индентора от вдавливающего усилия смещаются в зависимости от остаточного напряжения, и, соответственно, глубина индентирования при одинаковом вдавливающем усилии получается разной. При этом определение фактической глубины контакта в состоянии с остаточным напряжением может учитывать величину пластического наплыва.
Как показано на фиг. 8, различие в глубине вдавливания индентора при одном и том же усилии возникает вследствие сдвига кривой зависимости глубины вдавливания индентора от вдавливающего усилия, который вызван сжимающим остаточным напряжением, а количественное изменение пластического наплыва определяется этим различием. Аналогично, количественное изменение пластического наплыва определяется различием глубины вдавливания индентора при наличии растягивающего остаточного напряжения. Изменение высоты наплыва в состоянии сжимающего остаточного напряжения обозначено как  , в состоянии растягивающего остаточного напряжения как
, в состоянии растягивающего остаточного напряжения как  ; величины и могут быть выражены следующим образом:
; величины и могут быть выражены следующим образом:
Здесь  обозначает максимальную глубину вдавливания индентора, измеренную экспериментально в состоянии сжимающего остаточного напряжения,
обозначает максимальную глубину вдавливания индентора, измеренную экспериментально в состоянии сжимающего остаточного напряжения,  обозначает максимальную глубину вдавливания индентора, измеренную экспериментально в состоянии растягивающего остаточного напряжения, а
обозначает максимальную глубину вдавливания индентора, измеренную экспериментально в состоянии растягивающего остаточного напряжения, а  обозначает максимальную глубину вдавливания индентора в ненапряженном состоянии, как описано выше.
обозначает максимальную глубину вдавливания индентора в ненапряженном состоянии, как описано выше.
Тот факт, что площадь контакта получается не зависящей от остаточного напряжения, может быть объяснен изменением высоты наплыва, порождаемым остаточным напряжением, и представлением о том, что высота получается постоянной независимо от остаточного напряжения. При этом фактическая глубина контакта в состоянии сжимающего остаточного напряжения выражается следующим образом:

Далее, фактическая глубина контакта в состоянии растягивающего остаточного напряжения выражается следующим образом.

Здесь  обозначает фактическую глубину контакта индентора в состоянии сжимающего остаточного напряжения, a
обозначает фактическую глубину контакта индентора в состоянии сжимающего остаточного напряжения, a  обозначает фактическую глубину контакта индентора в состоянии растягивающего остаточного напряжения. Параметры hd и hp меняются в зависимости от свойств образца. Иными словами, данные параметры меняются в соответствии с остаточным напряжением. Как показано на фиг. 8, величины
обозначает фактическую глубину контакта индентора в состоянии растягивающего остаточного напряжения. Параметры hd и hp меняются в зависимости от свойств образца. Иными словами, данные параметры меняются в соответствии с остаточным напряжением. Как показано на фиг. 8, величины  и
и  равны
равны  .
.
Таким образом, в формуле (6) и в формуле (7) равны  . Причина этого в том, что согласно формуле (1) выражается следующим образом:
. Причина этого в том, что согласно формуле (1) выражается следующим образом:

Отсюда следует справедливость формулы (9), и можно видеть, что фактическая глубина контакта инвариантная, даже когда остаточное напряжение сохраняется.

Моделирование с целью отыскания состояния без остаточного напряжения
Основная идея новой модели для отыскания состояния без остаточного напряжения состоит в использовании глубины контакта индентора, которая не зависит от остаточного напряжения. При индентировании образца с растягивающим остаточным напряжением может быть получена показанная на фиг. 10 кривая зависимости глубины вдавливания индентора от вдавливающего усилия.
По этой кривой могут быть определены максимальное вдавливающее усилие L0, максимальная глубина  вдавливания индентора, результирующая глубина
вдавливания индентора, результирующая глубина  отпечатка индентора и т.д., а фактическая площадь Ас контакта индентора может быть найдена оптическим измерением отпечатка индентора с использованием оптического микроскопа и т.п.
отпечатка индентора и т.д., а фактическая площадь Ас контакта индентора может быть найдена оптическим измерением отпечатка индентора с использованием оптического микроскопа и т.п.
Кроме того, фактическая площадь контакта индентора может быть вычислена по формуле (10) вычисления фактической площади контакта индентора, исходя из модуля упругости и жесткости:
Здесь β обозначает корректирующий коэффициент, S обозначает жесткость, а Er обозначает эффективный модуль упругости.
Эффективный модуль Er упругости выражается следующим образом:
Здесь Е обозначает модуль упругости образца, v обозначает коэффициент Пуассона образца, Ei обозначает модуль упругости индентора, а vi обозначает коэффициент Пуассона индентора.
Таким образом, фактическая площадь AC контакта индентора может быть определена по модулю Е упругости образца. Например, приняв за коэффициент v Пуассона для материала типа стали значение 0,3, можно вычислить фактическую площадь AC контакта индентора по формуле (10) и формуле (11).
Фактическая глубина  контакта индентора может быть вычислена с использованием формулы для нахождения фактической глубины контакта индентора, которая для индентора Виккерса выражается формулой (12):
контакта индентора может быть вычислена с использованием формулы для нахождения фактической глубины контакта индентора, которая для индентора Виккерса выражается формулой (12):
Фактическая глубина контакта в состоянии с растягивающим остаточным напряжением, поскольку соответствует предположению об инвариантности глубины контакта, равна фактической глубине  контакта в состоянии без остаточного напряжения. Таким образом, имея только состояние с остаточным напряжением, можно определить фактическую глубину контакта в состоянии без остаточного напряжения.
контакта в состоянии без остаточного напряжения. Таким образом, имея только состояние с остаточным напряжением, можно определить фактическую глубину контакта в состоянии без остаточного напряжения.
Проведены исследования взаимосвязи фактической глубины контакта и глубины вдавливания индентора; эти величины измерялись экспериментально при отсутствии остаточного напряжения (S.K. Kang, J.Y. Kim, СР. Park, H.U. Kim, D. Kwon, J. Mater. Res. 25, 337 (2010)). Предложена следующая формула для вычисления фактической глубины контакта по экспериментально измеренным параметрам, например по максимальной глубине  вдавливания индентора и результирующей глубине
вдавливания индентора и результирующей глубине  отпечатка индентора в состоянии без остаточного напряжения:
отпечатка индентора в состоянии без остаточного напряжения:
Фиг. 11 иллюстрирует эту взаимосвязь. Величину можно вычислить, если известны величины  и . На практике при наличии образца в состоянии без остаточного напряжения эти величины могут быть легко измерены путем индентирования. Однако по данным только для состояния с остаточным напряжением вычислить и невозможно.
и . На практике при наличии образца в состоянии без остаточного напряжения эти величины могут быть легко измерены путем индентирования. Однако по данным только для состояния с остаточным напряжением вычислить и невозможно.
Тем не менее, как пояснялось выше, жесткость не зависит от остаточного напряжения, и величину  можно определить по этой инвариантной жесткости.
можно определить по этой инвариантной жесткости.
На фиг. 12 видно, что вследствие инвариантности жесткости разность между максимальной глубиной вдавливания индентора и результирующей глубиной отпечатка индентора не меняется и при сохранении остаточного напряжения:

Таким образом, формулу (13) для вычисления максимальной глубины вдавливания индентора в ненапряженном состоянии (т.е. состоянии, в котором нет остаточного напряжения) можно выразить в виде:
При этом величину  можно легко определить по кривой зависимости глубины вдавливания индентора от вдавливающего усилия, подобной представленной на фиг. 10, a можно определить по
можно легко определить по кривой зависимости глубины вдавливания индентора от вдавливающего усилия, подобной представленной на фиг. 10, a можно определить по  с использованием представления об инвариантности глубины контакта.
с использованием представления об инвариантности глубины контакта.
Таким образом, можно вычислить с использованием формулы (15).
Эту вычисленную величину можно нанести на фиг. 10 и затем сравнить между собой величины и  , как показано на фиг. 13.
, как показано на фиг. 13.
Показанная штриховой линией кривая зависимости глубины вдавливания индентора от вдавливающего усилия в состоянии без остаточного напряжения может, с использованием правила Кика и величины , показанной на фиг. 13, быть выражена формулой 16:
Здесь член Δhb является поправкой на неостроту дальнего конца индентора, и поскольку величина Δhb пренебрежимо мала по сравнению с , формулу (16), связывающую глубину вдавливания индентора и вдавливающее усилие, можно записать в следующем виде:
Здесь k обозначает подгоночный коэффициент.
Фиг. 24 в одной системе координат представляет график зависимости глубины вдавливания индентора от вдавливающего усилия в ненапряженном состоянии, полученной по формуле (17), и график зависимости глубины вдавливания индентора от вдавливающего усилия в состоянии с растягивающим остаточным напряжением.
По этому графику можно найти разность усилий (ΔL=L1-L0), соответствующую максимальной глубине вдавливания индентора в состоянии с растягивающим остаточным напряжением, а затем, подставив вычисленное значение в нижеприведенную формулу (18) вычисления остаточного напряжения, можно вычислить остаточное напряжение  в образце.
в образце.
Здесь Ψ обозначает коэффициент пластической податливости.
В соответствии с вариантом осуществления настоящего изобретения можно определить остаточное напряжение даже при отсутствии ненапряженного состояния образца.
Даже если выше указано, что все компоненты варианта осуществления настоящего изобретения соединены как единое устройство или соединены для использования в качестве единого устройства, настоящее изобретение не обязательно ограничено таким вариантом осуществления. Иными словами, по меньшей мере два элемента из числа всех структурных элементов могут быть избирательно соединены и использованы без выхода за пределы объема настоящего изобретения.
Кроме того, поскольку такие термины, как, например «включающий», «содержащий» и «имеющий», означают, что могут присутствовать один или более соответствующих компонентов, если для них конкретным образом не указано противоположное, это следует интерпретировать в том смысле, что может содержаться один или несколько других компонентов. Все технические, научные и другие термины соответствуют по смыслу их пониманию специалистом в данной области техники, если не указано иное. Общеупотребительные термины, содержащиеся в словарях, должны интерпретироваться в контексте соответствующих технических текстов без чрезмерной идеализации или отрыва от практических целей, если настоящее раскрытие явным образом не определяет их в таком виде.
Несмотря на то, что для целей пояснения был раскрыт предпочтительный вариант осуществления настоящего изобретения, специалисту в данной области техники должно быть понятно, что возможны различные модификации, дополнения и замены без выхода за пределы объема и сущности настоящего изобретения, раскрываемых в прилагаемой формуле изобретения. Соответственно, варианты осуществления, раскрытые в настоящем изобретении, служат для иллюстрации объема технической идеи настоящего изобретения, а объем настоящего изобретения не ограничивается вариантом осуществления. Объем настоящего изобретения должен определяться на основании прилагаемой формулы изобретения, и все технические идеи, ей эквивалентные, должны пониматься как входящие в объем настоящего изобретения.
Ссылки на родственные заявки
По настоящей патентной заявке испрашивается приоритет и права согласно 35 U.S.С. §119(a) по патентной заявке Кореи №10-2013-0011379, поданной 31 января 2013 года, которая тем самым включена в настоящий документ посредством ссылки для всех целей так же, как если бы она была полностью изложена в настоящей патентной заявке. Кроме того, когда по настоящей патентной заявке испрашивается право приоритета по тем же патентным заявкам Кореи от других стран в дополнение к США, раскрытие также считается включенным в настоящий документ посредством ссылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ В ТВЕРДЫХ ПОКРЫТИЯХ НА ПОДАТЛИВЫХ ПОДЛОЖКАХ | 2022 |
|
RU2793300C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ В ТОНКИХ ТВЕРДЫХ ПОКРЫТИЯХ ПО ВЫПУКЛОСТИ ПОКРЫТИЯ | 2022 |
|
RU2800339C1 |
| Устройство для проведения инструментального индентирования с возможностью экспериментального наблюдения области контакта индентора с поверхностью образца в реальном времени | 2022 |
|
RU2796200C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АДГЕЗИОННОЙ ПРОЧНОСТИ ТОНКИХ НАПРЯЖЕННЫХ ПОКРЫТИЙ НА ИЗДЕЛИИ | 2023 |
|
RU2810152C1 |
| Способ определения температуры стеклования | 2017 |
|
RU2665500C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОКРЫТИЯ НА ИЗДЕЛИИ | 2018 |
|
RU2698474C1 |
| Способ определения сопротивления деформации металлических материалов при индентировании конусом | 2019 |
|
RU2724353C1 |
| Способ определения сопротивления деформации металлических материалов при индентировании четырехгранной пирамидой | 2019 |
|
RU2731034C1 |
| Динамический наноиндентор | 2019 |
|
RU2721020C1 |
| Индентор-объектив | 2018 |
|
RU2680853C1 |

Изобретение относится к области определения остаточного напряжения путем инструментального индентирования. Сущность: осуществляют приложение к образцу одноосного напряжения, двуосного напряжения и одинакового по всем направлениям напряжения, а затем выполнение инструментального индентирования с использованием индентора, вычисление наибольшей глубины 





1. Способ определения остаточного напряжения, включающий:
приложение к образцу одноосного напряжения, двуосного напряжения и одинакового по всем направлениям напряжения, а затем выполнение инструментального индентирования с использованием индентора;
вычисление наибольшей глубины 




получение кривой зависимости глубины вдавливания индентора от вдавливающего усилия в ненапряженном состоянии путем подстановки вычисленной указанным образом максимальной глубины 
вычисление остаточного напряжения 
2. Способ по п. 1, отличающийся тем, что формулой для вычисления максимальной глубины вдавливания индентора в ненапряженном состоянии является формула
3. Способ по п. 2, отличающийся тем, что формулой, связывающей глубину вдавливания индентора и вдавливающее усилие, является формула
 ,
,
где k обозначает подгоночный коэффициент.
4. Способ по п. 3, отличающийся тем, что формулой для вычисления остаточного напряжения является формула
 ,
,
где Ac обозначает фактическую площадь контакта индентора для образца, а Ψ обозначает коэффициент пластической податливости.
5. Способ по п. 1, отличающийся тем, что фактическую глубину 
6. Способ по п. 5, отличающийся тем, что фактическую площадь Ас контакта индентора для образца вычисляют с использованием формулы
 ,
,
где β обозначает корректирующий коэффициент, S обозначает жесткость, а Er обозначает эффективный модуль упругости.
7. Способ по п. 6, отличающийся тем, что формулой для вычисления фактической глубины контакта индентора является формула
 .
.
8. Способ по п. 5, отличающийся тем, что фактическую площадь Ас контакта индентора для образца вычисляют путем оптического измерения отпечатка индентора в образце.
9. Способ по п. 5, отличающийся тем, что фактическую площадь Ас контакта индентора для образца вычисляют с использованием формулы
 ,
,
а Er вычисляют с использованием формулы
 ,
,
где β обозначает корректирующий коэффициент, S обозначает жесткость, Er обозначает эффективный модуль упругости, E обозначает модуль упругости образца, v обозначает коэффициент Пуассона образца, Ei обозначает модуль упругости индентора, а vi обозначает коэффициент Пуассона индентора.
10. Записываемый носитель информации, на котором записана компьютерная программа, включающая способ определения остаточного напряжения с использованием инструментального индентирования по одному из пп. 1-5.
11. Устройство инструментального индентирования, предназначенное для выполнения инструментального индентирования путем исполнения записанной на записываемом носителе информации компьютерной программы, включающей способ измерения остаточного напряжения с использованием инструментального индентирования по одному из пп. 1-5.
| US 20100198530 A1 05.08.2010 | |||
| US 7472603 B2 06.01.2009 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСТАТОЧНЫХ НАПРЯЖЕНИЙ | 1991 |
|
RU2032162C1 |
| Электрический музыкальный инструмент | 1946 |
|
SU82882A1 |

