Предлагаемое устройство формирования управляющих сигналов относится к области авиационного приборостроения и может быть использовано при разработке навигационно-пилотажного оборудования летательных аппаратов (ЛА).
Известны устройства, выполняющие функции определения координат местоположения ЛА и выработки управляющих сигналов в вертикальной плоскости, обеспечивающие совместно с системой автоматического управления (САУ) снижение ЛА при совершении им предпосадочного маневра (см. патент №3776455 США US, кл. 235/150 22, МКЛ G06G 7/78).
Устройство, описанное в вышеуказанном патенте, как наиболее близкое к предлагаемому решению, выбрано в качестве прототипа.
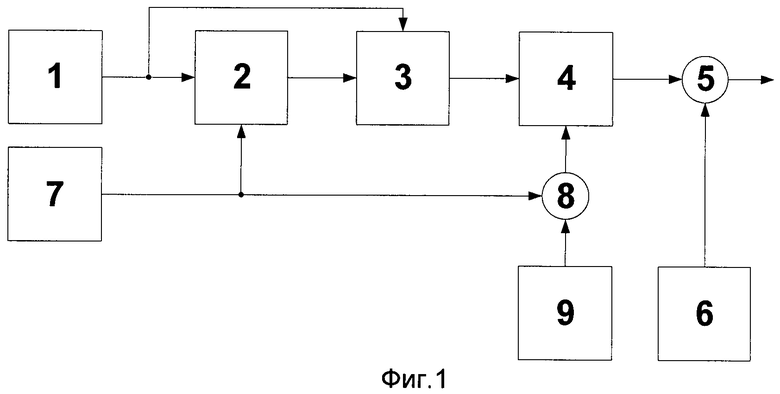
Устройство-прототип, с учетом только существенных для предполагаемого изобретения признаков, состоит (см. фиг.1) из последовательно соединенных радиодальномера 1, первого блока нелинейных преобразований 2, множительного устройства 3, второй вход которого соединен с выходом радиодальномера 1, второго блока нелинейных преобразований 4, первого сумматора 5, второй вход которого соединен с задатчиком наклона боковой поверхности конуса траектории снижения 6, причем вторые входы обоих блоков нелинейных преобразований 2, 4 соединены соответственно с выходами высотомера 7 и второго сумматора 8, входы которого соединены соответственно с выходами высотомера 7 и задатчика высоты на конечном участке траектории снижения 9.
На выходе блока 3 после соответствующих преобразований в блоке 2 сигналов наклонной дальности d от радиодальномера 1 и высоты Н от высотомера 7 получается сигнал В, соответствующий значению линейной дальности от ЛА до точки окончания снижения
В=d·cos(arcsin(H/d),
поступающий на второй вход блока 4, на первый вход которого из сумматора 8 поступает сигнал разности текущей высоты Н от высотомера 7 и заданной высоты Н0 на конечном участке траектории от задатчика 9
ΔН=Н-Н0,
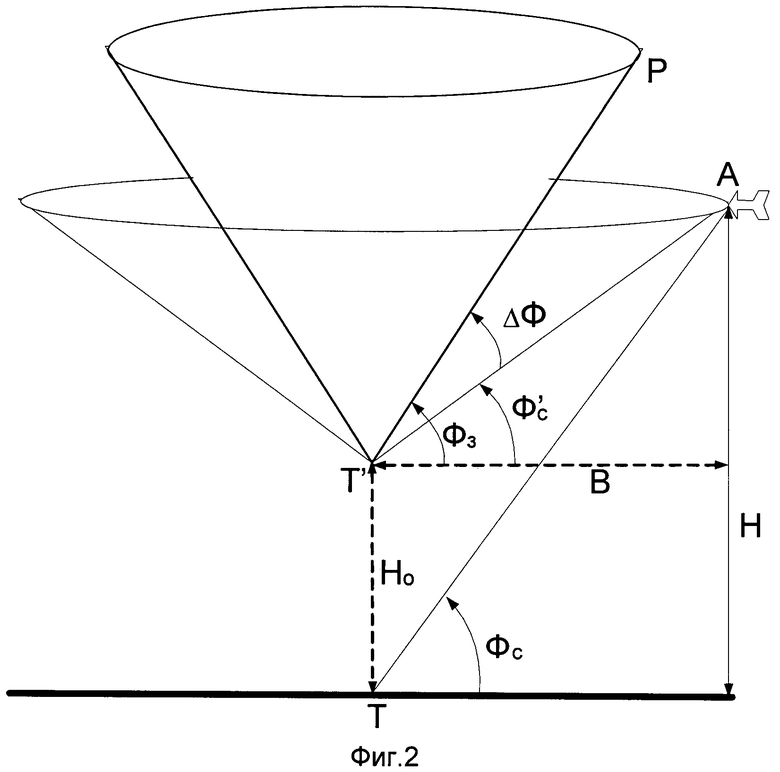
а на выходе получается сигнал, соответствующий наклону линии боковой поверхности AT конуса мгновенного положения ЛА А с вершиной в точке окончания маневра снижения Т' (см. фиг.2)
Фс'=arctg(ΔH/B).
В сумматоре 5 определяется рассогласование сигналов наклона заданного конуса траекторий снижения Фз из задатчика наклона 6 и сигнала Фс'
ΔФ=Фз-Фс'.
Сигнал ΔФ поступает во внешние устройства.
Основным недостатком устройства-прототипа является перерегулирование процесса управления в точке окончания маневра в вертикальной плоскости, т.к. в точку Т' устройство приводит самолет с углом наклона траектории снижения, не равным нулю. Управляющий сигнал ΔФ в точке Т' меняется скачком, т.к. Фз после прохождения точки Т' становится равным нулю, что из-за естественных запаздываний в отработке и приводит к перерегулированию процесса управления. Это увеличивает длину траектории снижения, а в определенных ситуациях (например, недостаточно погашенная скорость ЛА в сочетании с малым значением заданной высоты Н0 на конечном участке траектории) может привести и к аварийной ситуации.
Целью предлагаемого изобретения является увеличение безопасности полета и уменьшение длины траектории при совершении снижения.
В предлагаемом изобретении это достигается тем, что наклон боковой поверхности конуса заданных траекторий снижения не фиксирован, а уменьшается до нуля по мере приближения к точке Т'. В итоге в точку Т' самолет приходит с углом наклона траектории, равным нулю (см. фиг.4). Текущая заданная поверхность снижения определяется как конус Р'Т' с вершиной в точке Т' и основанием, получаемым при пересечении плоскостью положения самолета по высоте вспомогательного конуса Р''Т'', параллельного основному конусу РТ', с вершиной в точке Т'', находящейся на высоте Нк от поверхности земли.
Наклон конической поверхности, по которой проходит формируемая траектория снижения, определяется по формуле
Фз'=аrсtg(tgФз·(Н-Н0)/(Н-Нк)).
Как следует из этой формулы при Нк<Н0 и Н>>Н0
Фз'=Фз,
а при Н=Н0
Фз'=0.
Т.е. при изменении высоты до Н0, что происходит при совершении маневра снижения, наклон траектории снижения плавно изменяется от Фз до нуля, что позволяет самолету еще до достижения точки Т' перейти в практически горизонтальный полет.
Следует отметить, что с целью большей общности формулы изобретения, а также учитывая, что линейная дальность В может быть получена и при использовании другой физической информации (например, счисляемые/вычисляемые координаты самолета по данным от инерциальных/спутниковых навигационных систем и координаты точки Т), блоки 1, 2, 3 устройства-прототипа в дальнейшем рассматриваются в качестве одного блока под названием навигационная система.
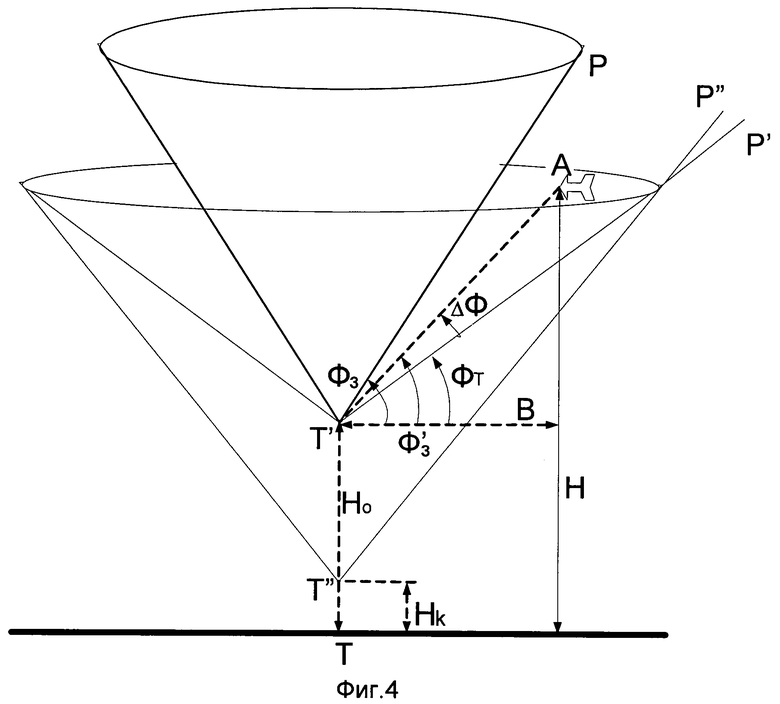
Таким образом, указанная цель достигается тем, что в устройстве (см. фиг.3), состоящем из навигационной системы 1, выход которой через блок нелинейных преобразований 2 соединен с первым входом первого сумматора 3, высотомера 5 и задатчика высоты на конечном участке траектории снижения 6, выходы которых через второй сумматор 4 одновременно соединены со вторым входом блока нелинейных преобразований 2, задатчик наклона основного конуса траекторий снижения 7 подключен ко второму входу первого сумматора 3 через вновь введенные, последовательно соединенные второй блок нелинейных преобразований 8, множительное устройство 9 и третий блок нелинейных преобразований 10, ко второму входу которого, через вновь введенный третий сумматор 11 одновременно подсоединены вновь введенный задатчик высоты вершины вспомогательного конуса 12 и высотомер 5, причем второй вход множительного устройства 9 соединен с выходом второго сумматора 4.
В сумматоре 4 из сигнала текущей высоты Н из высотомера 5 вычитается сигнал заданной высоты Н0 на конечном участке траектории из задатчика 6
ΔН=Н-Н0.
Таким образом, на выходе сумматора 4 формируется сигнал высоты самолета относительно конечного участка траектории, подаваемый на второй вход блока 2, на первый вход которого поступает сигнал линейной дальности В из навигационной системы 1. На выходе блока 2 формируется сигнал наклона боковой поверхности конуса AT' мгновенного положения самолета с вершиной в точке Т'
Фс'=arctg(ΔH/B),
поступающий на первый вход первого сумматора.
На выходе третьего сумматора 11 формируется сигнал высоты самолета относительно вершины вспомогательного конуса
ΔНк=Н-Нк,
поступающий на второй вход третьего нелинейного устройства 10, на первый вход которого поступает сигнал, сформированный последовательно в блоках 7, 8, 9
f=ΔН·tgФз,
а на выходе формируется сигнал, соответствующий углу наклона боковой поверхности текущих траекторий снижения Р'Т'
Фт=arctg(f/ΔHк),
поступающий на второй вход первого сумматора 3, в котором формируется разностный сигнал
ΔФ=Фт-Фс',
являющийся выходным сигналом устройства.
Таким образом, совокупность признаков предлагаемого устройства обладает существенной новизной по сравнению с известным, т.к. позволяет за счет плавного уменьшения наклона боковой поверхности конуса заданных траекторий снижения, по мере уменьшения высоты, осуществлять предварительный выход из снижения (уменьшения угла наклона траектории снижения) еще до достижения точки третьего разворота. При этом, естественно, оно, не устраняя запаздывания в отработке внешними устройствами управляющих сигналов, позволяет устранить последствия от таких запаздываний, т.к. в таком устройстве резких скачков в управляющих сигналах в точке окончания снижения нет.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
| Способ и устройство управления полетом группы летательных аппаратов | 2022 |
|
RU2786276C1 |
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
| СПОСОБ ЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ОТ УПРАВЛЯЕМЫХ РАКЕТ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280836C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОЛЕТЕ ПО МАРШРУТУ | 2010 |
|
RU2444044C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ | 2014 |
|
RU2542686C1 |
| АВТОМАТИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА ПЕРЕДАЧИ МЕТЕОРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК АЭРОДРОМА И ВВОДА ИХ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2012 |
|
RU2519622C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
Изобретение относится к измерительной технике и может быть использовано в составе комплексов навигационного оборудования летательных аппаратов. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство формирования управляющих сигналов при снижении содержит высотомер, три сумматора, три нелинейных преобразователя, задатчик высоты на конечном участке траектории снижения, задатчик наклона боковой поверхности основного конуса траекторий снижения, задатчик высоты вершины вспомогательного конуса траекторий снижения и блок умножения, которые обеспечивают повышение безопасности полета и уменьшение длины траектории снижения. 4 ил.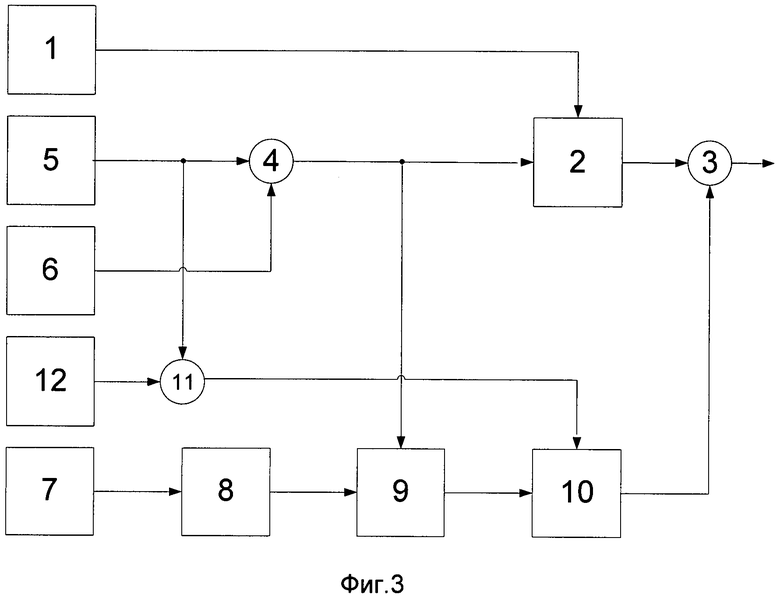
Устройство формирования управляющих сигналов самолета при снижении, состоящее из навигационной системы, выход которой через блок нелинейных преобразований соединен с первым входом первого сумматора, высотомера и задатчика высоты на конечном участке траектории снижения, выходы которых через второй сумматор одновременно соединены со вторым входом блока нелинейных преобразований, а также задатчика наклона основного конуса траекторий снижения, отличающееся тем, что, с целью увеличения безопасности полета и уменьшения длины траектории снижения, задатчик наклона основного конуса траекторий снижения подключен ко второму входу первого сумматора через последовательно соединенные второй блок нелинейных преобразований, множительное устройство и третий блок нелинейных преобразований, ко второму входу которого через третий сумматор одновременно подсоединены задатчик высоты вершины вспомогательного конуса и высотомер, причем второй вход множительного устройства соединен с выходом второго сумматора.
| US 3776455 A, 04.12.1973 | |||
| US 3064924 A, 20.11.1962 | |||
| US 4494202 A, 15.01.1985 | |||
| JP 2007064691 A, 15.03.2007 | |||
| СТЕНД ДЛЯ СРАВНИТЕЛЬНЫХ И РЕСУРСНЫХ ИСПЫТАНИЙ НАТЯЖНЫХ ЗВЕЗДОЧЕК | 1991 |
|
RU2009458C1 |

