Изобретение относится к нефтегазовой промышленности, а более конкретно к внутритрубным средствам диагностики трубопроводов, предназначенным для обнаружения механических дефектов внутри трубопроводов, предназначенных для перекачки углеводородов преимущественно в морских условиях.
Известно устройство диагностики трубопровода (патент RU №2196312 [1]), которое включает два датчика вибрации, два усилителя, два фильтра, цифровой коррелятор, дисплей, передатчик, приемник, два аналого-цифровых преобразователя, шифратор, дешифратор, генератор высокой частоты, фазовый манипулятор, усилитель мощности, селектор фазоманипулированных сигналов, удвоитель фазы, два измерителя ширины спектра, блок сравнения, пороговый блок, ключ, демодулятор фазоманипулированных сигналов, два перемножителя, узкополосный фильтр и фильтр низких частот выделением сигналов с частотой 1000-2500 Гц, что позволяет повысить надежность радиоканала путем использования сложных сигналов с фазовой манипуляцией.
Однако данное устройство позволяет достичь технического результата на локальных участках трубопровода и только в условиях открытых трубопроводов, так как передача зарегистрированных сигналов на диспетчерский пункт осуществляется по радиоканалу.
Как известно, трассы большинства магистральных трубопроводов пролегают по местности со сложным рельефом, включая дно водоемов, в том числе и морей. При этом для исключения влияния внешних условий на эксплуатационные характеристики магистрального трубопровода его, как правило, заглубляют, а на самых неблагоприятных участках местности размещают в бетонном «саркофаге», что практически исключает применение известного устройства для обнаружения дефектов в трубопроводах, уложенных на дне глубоководного водоема.
Кроме того, использование низких частот, с выделением сигналов с частотой 1000-2500 Гц, отягощается возрастанием влияния шумовой помехи, что для исключения влияния шумовой помехи требует усложнения аппаратуры и позволяет регистрировать акустические сигналы с достаточной надежностью при определении только линейных свойств исследуемой среды.
Известно также, устройство для определения места и размеров течи в трубопроводе (патент RU №2221230 [2]), которое относятся к технике контроля трубопроводных систем и предназначено для определения места повреждения и оценок размера повреждения в труднодоступных или недоступных техническому надзору напорных трубопроводах, в частности, в подводных трубопроводах, и в дюкерах. Техническим результатом является обеспечение помехоустойчивости, высокой точности определения места течи и оценки размеров повреждения трубопровода. Для этого осуществляют прием акустических сигналов шума течи двумя датчиками, расположенными вдоль трубопровода, преобразуют акустические сигналы в электрические сигналы, а после усиления, фильтрации, накопления и определения взаимного спектра электрических сигналов определяют наличия признаков акустических сигналов течи по уровню энергии взаимного спектра. Формируют сигнал тревоги и определяют места течи по разности времен прибытия акустических сигналов к двум датчикам. Оценивают диаметр повреждения по данным о частоте максимума модуля взаимного спектра, о скорости истечения струи, определяемой исходя из информации о давлениях и плотностях сред в трубопроводе и в окружающей среде, а также о скорости движения продукта в трубопроводе. Для трубопроводов большой протяженности в предлагаемый способ введен прием сигналов от акустических датчиков, расположенных параллельно трубопроводу на дистанциях d друг от друга, которые определяются по предлагаемым согласно изобретению математическим зависимостям. При этом накопление результатов и взаимно спектральный анализ сигналов осуществляют между каждой парой соседних датчиков непрерывно или эпизодически по заданной программе, а при выявлении сигнала тревоги, до уточнения места течи, определяют аварийный участок трубопровода между парой соседних датчиков, сигнализировавших о наличии течи. Устройство для определения параметров течи в трубопроводе содержит n измерительных каналов, каждый из которых состоит из последовательно соединенных блока акустических преобразователей, блока усиления, выход которого соединен с первым входом блока фильтрации, блока аналого-цифрового преобразования, а также содержит блок управления.
В известное устройство [2] дополнительно введены: последовательно соединенные n-канальный блок уплотнения информации, мультиплексный канал передачи информации и блок разуплотнения информации, при этом n входов n-канального блока уплотнения информации соединены с соответствующими выходами n блоков аналого-цифрового преобразования, также введен n-1 канальный блок накопления и анализа взаимных спектров, имеющий n входов и n-1 выходов, при этом каждый из n физических каналов выхода блока разуплотнения информации соединен с соответствующим входом n-1 канального блока накопления и канальный блок определения места течи, n-1 канальный блок определения размеров течи, n-1 канальный блок определения полосы фильтрации, входы которых параллельно соединены с соответствующими выходами n-1 канального блока накопления и анализа взаимных спектров, а выход n-1 канального блока определения полосы фильтрации соединен со вторыми входами блоков фильтрации, также введен блок формирования сигнала тревоги, вход которого соединен с выходом n-1 канального блока обнаружения течи, с выходом n-1 канального блока определения места течи и с выходом n-1 канального блока определения размеров течи, также введен индикатор места и размера течи, вход которого подсоединен к выходу блока формирования сигнала тревоги.
Блок управления своими управляющими выходами и информационными входами присоединен к n-канальному блоку уплотнения информации, блоку разуплотнения информации, n-1 канальному блоку накопления и анализа взаимных спектров, n-1 канальному блоку обнаружения течи, n-1 канальному блоку определения места течи, n-1 канальному блоку определения размеров течи, n-1 канальному блоку определения полосы фильтрации, блоку формирования сигнала тревоги и индикатору места и размера течи.
Данное устройство выгодно отличается от известного устройства [1], однако основным недостатком данного устройства является то, что для трубопроводов, размещенных на дне водоема, акустические шумы внешней среды, при экстремальных условиях вносят дополнительную погрешность при измерениях, что существенно снижает эффективность экстренной диагностики магистральных трубопроводов высокого давления и сужает область применения известных устройств, особенно в зонах, подверженных динамическому изменению физико-географических и гидрологических факторов.
Известно также устройство, представляющее собой дистанционно управляемый снаряд для очистки трубопроводов от засорений (Патент WO №2006/101398, 2006: [3]), которое состоит из управляющего и силового модуля. При этом управляющий модуль включает в себя источник питания, систему связи и систему управления, а силовой модуль состоит из силовой головки, цангового зажима, конуса цанг, уплотнителя, фланцев привода, двухстороннего шарнирного соединения. Данное устройство обеспечивает перекрытие трубопровода при обнаружении коррозийных дефектов внутри трубопровода с возможностью устранения поверхностных коррозийных дефектов. Однако данное устройство используется только после факта обнаружения коррозийного дефекта, т.е. данное устройство не является средством оперативной диагностики внутренней полости трубопровода.
Известно также устройство (патент RU №2381841: [4]), предназначенное для очистки внутренней полости трубопровода и содержащее корпус со штуцером и реактивными соплами, полость для рабочего агента, например воды, вал с наконечником, закрепленный в головке, наружную втулку, внутри которой установлена державка с подшипниками и гайкой, и хвостовик с напорной камерой с соплами для выхода рабочего агента на лопасти, закрепленные изнутри на втулке с возможностью ее вращения, при этом на втулке могут быть выполнены винтообразные наружные шнековые выступы, продвигающие устройство вперед, а между корпусом и втулкой выполнен зазор для выхода отработанного агента, при этом головка снабжена ножами для разрушения крупных фракций. Недостатком данного устройства, представляющего собой гидроснаряд, является ограниченное применение, в основном для очистки подземных и наземных канализаций и иных трубопроводных систем для очистки труб от нагара, накипи и других отложений, которые сильно забиты и продолжительное время не использовались, а также заросших канализаций диаметром не более 400 мм. Кроме того, данный снаряд автономно не управляем и для отвода отложений из трубопровода необходимы специальные отводы или отверстия в трубопроводе. Кроме того, его применение ограничено только трубопроводами для транспортировки неагрессивных продуктов транспортировки, например воды, которая используется в известном устройстве, в качестве движущейся силы.
На безопасную эксплуатацию подводных трубопроводов, уложенных, например, на морском дне, существенное влияние оказывает наличие экстремальных гидрометеорологических и природно-климатических условий, обусловленных целым рядом факторов (ледяной покров, абразия береговой зоны, литодинамические процессы, поверхностное волнение, течения, штормы, изменения уровня моря, ветер, температура воздуха и морской воды, рост морских отложений и т.д.). Все это приводит к повышенным нагрузкам и нештатным эксплуатационным режимам газопровода.
Перечисленные выше воздействия, а также причины техногенного происхождения могут привести к планово-высотным перемещениям газопровода и увеличению статических и динамических нагрузок и, как следствие, накоплению усталостных напряжений, увеличению вибрационных нагрузок, возникновению свободных пролетов, заглублению отдельных участков в связи с изменением несущей способности грунта, что в итоге может привести к повреждению элементов конструкции газопровода вплоть до полного их разрушения.
Кроме того, нестабильность (смещение) грунта, внешние повреждения и напряжения в газопроводе влияют на восприимчивость последнего к появлению стресс-коррозионного растрескивания (Stress Corrosion Cracking (SCC)), основными причинами которого является воздействие окружающей среды (почвы, температуры, водного окружения, бактериальной активности) и действующих операционных нагрузок (прежде всего высокого циклического давления, например, по проектным данным для Северо-Европейского газопровода (СЕГ) оно составляет - 25 МПа). Трещины SCC располагаются в колониях, содержащих сотни или тысячи индивидуальных трещин, которые со временем могут объединиться и вызвать утечку или разрыв трубы.
Указанные выше отличительные особенности СЕГ, а также протяженность трассы на морских участках (около 1200 км), отсутствие шлюзовых камер по трассе обуславливают необходимость постановки и решения задачи в обеспечение создания оперативной комплексной системы мониторинга технического состояния морских участков магистральных трубопроводов, посредством нескольких технических средств, а также режимов использования этих средств.
При этом, применение тех или иных аппаратных средств диагностики (прежде всего внутритрубных снарядов, а также ROV-автоматизированного подводного движущегося средства, предназначенного в основном для обеспечения визуального осмотра участка трубопровода) должно определяться на основании информации, полученной с помощью систем первичных наблюдений и обработанной комплексом программ оперативной обработки, в результате чего должны вырабатываться обоснованные предложения (или рекомендации) по применению диагностических средств.
При этом необходимо выделить следующие определяющие составные части системы мониторинга технического состояния трубопровода.
1. Внутритрубные диагностические снаряды, позволяющие:
- измерять изгибы (изгибные усилия), обусловленные планово-высотными смещениями трубопровода;
- измерять и привязывать профили проходных сечений трубопровода, а также деформации стенок, типа вмятин, овальностей, гофр, складок и т.д.;
- определять пространственное положение (позиционирование) трубопровода на местности;
- измерять и идентифицировать коррозионные дефекты и определять их точное положение.
2. Комплект первичных измерительных датчиков, установленных стационарно на трубопроводе.
Практика внутритрубной диагностики существующих трубопроводов подразумевает применение снарядов трех типов - измерительного (ИС) и дефектоскопического (ДС), а также снаряда для перекрытия трубопровода, что обусловлено, прежде всего, необходимостью решения трех функционально разных задач:
- первой - измерения «геометрических параметров» трубопровода: координат, изгибов и соответствующих этим изгибам напряжений, что может быть решено, например, путем применения бесплатформенной инерциальной навигационной системы (БИНС) в составе измерительного снаряда, а также - измерения профиля поперечных сечений трубопровода, что решается применением профилеметрического модуля. Выявление изгибающих напряжений должно обязательно сопровождаться измерением профиля стенок трубопровода, с тем, чтобы оперативно выявить величины деформаций стенок, обусловленных появившимися изгибами.
- второй - выявления, измерения и локализации коррозионных дефектов трубопровода, что решается применением дефектоскопического снаряда с магнитной диагностикой (отметим, что магнитная диагностика и профилеметрия не сочетаются в одном снаряде по ряду причин и, прежде всего по разной пропускной способности прохождения сквозь искаженные за счет деформаций стенок диаметры трубопровода);
- третий - для перекрытия трубопровода и герметизации трубопровода при обнаружении мест утечек и удалении коррозии.
Кроме того, есть и экономические причины:
Измерительный снаряд определенно дешевле дефектоскопического снаряда. При обследовании трубопровода ИС не требует низкой скорости движения в отличие от снарядов с магнитной (4-5 м/с) и ультразвуковой диагностикой (1-2 м/с). Скорость измерительного снаряда может совпадать со скоростью носителя, т.е. прогон может осуществляться за время в несколько раз меньшее, чем прогон ДС, что, соответственно, снижает затраты на проведение прогона. Обслуживание прогона измерительного снаряда также экономичнее, чем обслуживание прогона ДС.
Все вышесказанное, а также тот факт, что частота прогонов измерительного снаряда в силу литодинамических, природно-климатических и других факторов в несколько раз выше, чем частота прогонов дефектоскопического снаряда, делает экономически более выгодным наличие двух типов снарядов.
Как показывает практика, для диагностики магистральных трубопроводов аналогичных СЕГ необходим измерительный снаряд, включающий БИНС и модуль профилеметрических измерений.
БИНС в составе измерительного снаряда позволяет решать следующие вопросы:
1. Точное определение местоположения трассы (позиционирование) трубопровода на местности, так называемый «mapping», что в первую очередь отвечает обязательным требованиям международного стандарта безопасности, выработанным ASME (American Society of Mechanical Engineers), особенно жестким для урбанизированных районов прокладки трубопровода, а также решает ряд прикладных вопросов (упрощает проведение ремонтных работ в отдаленных районах и т.д.).
Точность вычисления координат определяется типом применяемых инерциальных чувствительных элементов (ЧЭ) и числом маркерных точек с известными координатами (полученных с помощью GPS) по трассе трубопровода.
2. Определение с высокой точностью изгибов и деформаций линий трубопровода. При этом сравнение результатов съемок, производимых внутритрубным снарядом через определенные промежутки времени, обеспечивает точный мониторинг планово-высотных смещений трубопровода и его изгибов, что доказывается многолетним опытом применения подобных снарядов за рубежом (Концепция создания и эксплуатации комплексной системы мониторинга технического состояния морских участков подводного газопровода / Биндер Я.И., Добротворский А.Н., Пешехонов В.Г., Яценко С.В. // С-П.: Ассоциация «Морские технологии и безопасность», Государственный научно-исследовательский навигационно-гидрографический институт МО РФ, ЦНИИ «Электроприбор», ОАО «Электромеханика». Доклад на семинаре ОАО «Гипроспецгаз» и компании DNV по проблеме разработки нефтегазовых месторождений в арктических ледовых условиях, включая вопросы экспорта сжиженного природного газа, ноябрь 2004 г.: [5]).
Так, например, анализ данных обследования подводных участков газового трубопровода в норвежском секторе Северного моря показал, что в условиях действия циклических значений эксплуатационного давления и температуры на подводных газовых линиях вероятно появление изгибов газопровода и выхода его отдельных участков из заглубления в траншеи. При этом сравнивается «старая» технология контроля смещений газовых линий с помощью ROV, оборудованного системой гидравлического щупа с регулируемой длиной для поиска поверхности трубопровода в траншеи и «новая» - с применением внутритрубного снаряда с БИНС на борту. «Старая» технология позволяла обследовать приблизительно 1,5 км в день, т.е. требовала большого ресурса времени и была очень дорогостоящей. «Новая» технология показала более высокую точность и оперативность обследования (20 км за 1 час) и была принята к применению на подводных газовых линиях.
Что касается трубопроводов аналогичных СЕГ, которые характеризуются большой протяженностью морских участков (около 1200 км) и отсутствием промежуточных шлюзовых камер по трассе, то применение БИНС позволит измерить даже небольшие смещения и изгибы газопровода, причем с одинаково высокой точностью на протяжении всей трассы. При этом в качестве реперных точек, по которым в основном будут корректироваться показания одометров, могут быть приняты поперечные сварные швы с известными географическими координатами, полученными при прокладке.
БИНС позволяет определить точные угловые и линейные координаты выявленных профилеметром дефектов. Кроме того, данные профилеметрической диагностики и выходные данные БИНС сочетаются в бортовой системе снаряда, что значительно снижает объем последующей обработки.
Известен также измерительный снаряд [5] модели Geopig (BJ, Канада), содержащий БИНС и профилеметрический модуль.
Известен также снаряд модели Scout Scan Solo Tool (PII, Великобритания), в котором нет профилеметрического модуля, но есть БИНС. Снаряд Scout Scan Solo предназначен только для измерения географических координат и кривизны трубопровода.
Практика применения профилеметрических модулей в снарядах для газовых линий традиционно использует механический профилемер, представляющий собой систему с радиально направленными подпружиненными механическими датчиками, имеющими на концах небольшие колеса, позволяющие им свободно двигаться по стенке трубы.
Обычное требование по давлению в снарядах-профилемерах (например, Geopig) - 15 МПа и скорость съемки не более 3-4 м/с. Это обусловлено, прежде всего, вибрационными и ударными (толчки, удары и т.д.) нагрузками на механические датчики, которые могут привести к проблемам пропуска участка съемки или к полному «срыву» датчика с участка стенки трубы.
При этом вибрационные и динамические нагрузки возрастают с увеличением скорости движения снаряда в трубопроводе, поэтому при использовании традиционных механических профилемеров необходимо иметь снаряды с активным управлением скоростью движения снаряда, которые при сохранении производительности работы газопровода обеспечивают необходимую скорость движения снаряда в период съемки характеристик трубопровода, или при использовании существующих снарядов понижать показатели давления газа в трубопроводе (что, с точки зрения, требований к производительности СЕГ недопустимо).
Измерительных снарядов с активным управлением скоростью движения нет, как нет и снарядов для условий магистральных трубопроводов, аналогичных СЕГ, пригодных к использованию при скоростях движения газа (со скоростью газа (12-15 м/с) при давлении до 25 МПа) [5].
В известных измерительных снарядах число радиально направленных механических или ультразвуковых датчиков, как правило, превышает 60 датчиков). Уменьшить количество датчиков в профилеметрическом модуле можно путем применения многоточечные системы измерения, обеспечивающие надежный контроль формы любых цилиндрических поверхностей без необходимости обеспечения образцовой оси вращения.
Известны также снаряды [5] с магнитной диагностикой и БИНС на борту - снаряд-дефектоскоп (MFL) VECTRA, (BJ (Канада), разработка 1996 г), снаряд-дефектоскоп (MFL) Scout Scan Tool (РИ (Великобритания), разработка 1996 г).
Наличие БИНС в составе снаряда-дефектоскопа обеспечивает наряду с измерением ранее перечисленных параметров:
- точное определение угловых и линейных координат дефектов: угловые координаты - с точностью ±0,1°, положение их на участке между поперечными швами - с точностью ±20 мм;
- значительное снижение объема последующей апостериорной обработки за счет взаимной обработки (сочетания) в бортовой системе снаряда данных диагностики и данных БИНС;
- выработку значений линейной скорости снаряда и значений изгибающих усилий в местах аномалий стенок трубы при проведении магнитной диагностики, что является дополнительной информацией, использующейся при идентификации и классификации дефектов.
Корреляция данных БИНС и магнитной диагностики (также как и корреляция данных БИНС и профилеметрического модуля) обеспечивает наилучшую идентификацию дефектов. Полную же идентификацию всех возможных дефектов и аномалий трубопровода обеспечивает корреляция данных, полученных в процессе пробегов обоих снарядов.
Наиболее близким по условиям применения к условиям, например, СЕГ является снаряд MagnescanXHR, специально разработанный компанией PII/Pipetronix (UK) для компании Norwegian Statoil и Asgard transport line system.
Этот снаряд разработан для обследования подводного трубопровода в Северном море, эксплуатирующегося при давлении до 22 МПа, имеющего толщину стенок - 38 мм, диаметр трубопровода - 40''. Может обследовать всю трассу трубопровода за один прогон (рассчитан на 500 миль (850 км)).
Для всех компонентов этого снаряда разрабатывающей компании пришлось устанавливать новые стандарты исполнения.
Однако снаряд MagneScan XHR не удовлетворяет требованиям магистральных трубопроводов аналогичных СЕГ по следующим причинам:
- этот снаряд реализует технологию MFL, т.е. обеспечивает только продольное намагничивание стенок трубы, не позволяющее выявить наиболее опасный для СЕГ вид коррозии - SCC;
- снаряд не имеет системы активного управления скоростью движения снаряда (может иметь систему байпасирования без управления скоростью, которая мало эффективна при высоких скоростях движения газа);
- не имеет в своем составе БИНС.
Та же фирма (РII) имеет в своем арсенале снаряды TranScan, предназначенные для обнаружения SCC, но в настоящее время эти снаряды имеют максимальный диаметр - 36'', рассчитаны на толщину стенки - не более 15 мм, давление - 22 МПа.
Таким образом, для магистральных трубопроводов аналогичных СЕГ необходим снаряд, сочетающий наличие БИНС и одновременно технологию продольного и поперечного намагничивания.
Известный снаряд (Патент WO №2006/101398, 2006: [3]) выполнен в виде поезда и состоит из управляющего модуля и силового модуля.
Управляющий модуль включает источник питания, часть системы связи, и модуль управления силовым модулем.
Силовой модуль состоит из силовой головки, цангового зажима, конуса цанг, уплотнителя, фланцев, шарнирного соединения и роликового устройства и представляет собой дистанционно управляемый внутритрубный снаряд для очистки трубопроводов от засорений, преимущественно механического происхождения. Недостатком данного снаряда является низкая производительность обследования трубопровода. Его передвижение осуществляется посредством роликов.
При использовании внутритрубных снарядов (измерительных датчиков), также одной из сложных технических задач является задача связи внутритрубного снаряда через стенку трубопровода с диспетчерской станцией. Обычно трубопроводы выполняются из стали (например, марок Сталь 65, Сталь 70, либо Х65Х70 DIN EN ANSI) толщиной от 10 до 42 мм, что является существенным препятствием для передачи радиосигналов из трубопровода через окружающую среду на диспетчерскую станцию. Подводные трубопроводы, кроме этого, имеют бетонную армированную рубашку толщиной до 120 мм.
Задачей настоящего технического решения является расширение функциональных возможностей устройства оперативной диагностики магистрального трубопровода за счет обеспечения избыточности измерений для определения характеристик состояния трубопровода, с одновременным повышением производительности процесса диагностики магистральных трубопроводов.
Поставленная задача решается за счет того, что в устройстве для оперативной диагностики магистрального трубопровода, включающим измерительные датчики приема акустических сигналов, расположенными вдоль трубопровода, n измерительных каналов, каждый из которых состоит из последовательно соединенных блока акустических преобразователей, блока усиления, блока фильтрации, блока аналого-цифрового преобразования, блок управления, n-канальный блок уплотнения информации, мультиплексный канал передачи информации и блок разуплотнения информации, n блоков аналого-цифрового преобразования, n-1 канальный блок накопления и анализа взаимных спектров, имеющий n входов и n-1 выходов, n-1 канальный блок обнаружения течи, n-1 канальный блок определения места течи, n-1 канальный блок определения размеров течи, n-1 канальный блок определения полосы фильтрации, блок формирования сигнала тревоги, индикатор места и размера течи, вход которого подсоединен к выходу блока формирования сигнала тревоги, при этом блок управления своими управляющими выходами и информационными входами присоединен к соответствующим управляющим и информационным входам и выходам n-канального блока уплотнения информации, блока разуплотнения информации, n-1 канального блока накопления и анализа взаимных спектров, n-1 канального блока обнаружения течи, n-1 канального блока определения места течи, n-1 канального блока определения размеров течи, n-1 канального блока определения полосы фильтрации, блока формирования сигнала тревоги и передачи его по гидроакустическому каналу связи и/или радиоканалу на диспетчерскую станцию, а также включающим измерительные датчики, размещенные на дистанционно управляемом внутритрубном диагностическом снаряде и включающие акустические, профилеметрические датчики и бесплатформенную инерциальную систему, при этом внутритрубный диагностический снаряд состоит из модуля управления, силового модуля и модуля локализации повреждений, а измерительные датчики функционально связаны между собой посредством блока управления с образованием измерительного модуля, в котором в отличие от известных устройств, модуль управления, измерительный модуль, модуль локализации повреждений и силовой модуль конструктивно выполнены в виде отдельных секций сочлененных между собой, посредством элемента сцепления со стыковочным узлом, с образованием многоступенчатого внутритрубного снаряда, модуль локализации повреждений снабжен мобильным резервуаром для утилизации продукта, гидроакустический канал связи выполнен в виде трехступенчатого каскада, сформированного приемоизлучающими элементами, установленными на внутритрубном снаряде, на внутренней и внешней поверхностях трубопровода, преимущественно в реперных точках, расположенных в поперечных швах трубопровода с известными плановыми географическими координатами.
Сущность предлагаемого технического решения поясняется чертежом, на котором представлена конструкция силового модуля внутритрубного диагностического снаряда.
Конструкция силового модуля дистанционно управляемого внутритрубного снаряда. Силовой модуль содержит колесо 1 ролика, ось ролика 2, кронштейн 3 ролика, корпус ролика 4, фиксатор 5 цанги, который представляет собой болт, плиту 6 привода цанг, болт 7 крепления сферической опоры, верхнюю крышку 8 сферической опоры, нижнюю крышку 9 (вкладыша) сферической опоры, ось 10 привода плиты привода цанг, болт 11 фиксации оси привода плиты цанг, фиксирующее кольцо 12, внутренний цилиндр 13 корпуса цанг, цангу 14, направляющую 15 цанги, болт 16 фиксации направляющей цанги, конус 17 цанг (подвижная щека уплотнителя), уплотнитель 18, плиту 19 (неподвижная щека уплотнителя) уплотнителя, ролик 20 (в сборе), болта 21 крепления ролика, наружный цилиндра 22 корпуса (корпус скольжения), разжимную пружину 23, направляющую 24 разжимной пружины, гидроцилиндр 25, болт 26 фиксации оси привода плиты цанг, уплотнитель 27, поршень 28, уплотнитель 29, крышку 30 гидроцилиндра, вкладыш сальников 31.
Конструкция силового модуля обеспечивает перекрытие трубопровода для выполнения работ по устранению очага повреждения трубопровода, с возможностью его перемещения в зоне очага повреждения по оси трубопровода.
Устройство для оперативной диагностики магистральных трубопроводов выполнено в виде дистанционно управляемого внутритрубного диагностического снаряда с активным управлением скоростью движения, измерительные датчики в котором функционально связаны между собой посредством блока управления с образованием измерительного модуля. Модуль управления, измерительный модуль, модуль локализации повреждений и силовой модуль конструктивно выполнены в виде отдельных секций сочлененных между собой, посредством элемента сцепления со стыковочным узлом с образованием многоступенчатого внутритрубного снаряда.
Гидроакустический канал связи выполнен в виде трехступенчатого каскада, сформированного приемоизлучающими элементами, установленными на внутритрубном снаряде, на внутренней и внешней поверхностях трубопровода, преимущественно в реперных точках, расположенных в поперечных швах трубопровода с известными плановыми географическими координатами.
Модуль управления включает систему ориентации и навигации, блок управления движением и движительный комплекс.
В состав системы ориентации и навигации входят датчики первичной информации, выполненные по технологиям микросистемной техники, а также аппаратные средства для сбора, предварительной обработки информации и реализации программно-алгоритмического обеспечения для решения задач ориентации и навигации дистанционно управляемого внутритрубного снаряда.
Датчики первичной информации системы ориентации и навигации включают микромеханические гироскопы, микромеханические акселерометры, векторный микромагнитометр.
Аппаратные средства системы ориентации и навигации включают многоканальный аналого-цифровой преобразователь и цифровой сигнальный процессор.
Основой системы ориентации и навигации является бесплатформенная микромеханическая курсовертикаль. Курсовертикаль и вычислитель образуют микромеханический инерциальный измерительный блок (МИИБ), который предназначен для измерения углов курса, крена и дифферента дистанционно управляемого внутритрубного снаряда, составляющих векторов угловой скорости, линейного ускорения, компонент магнитного поля. В качестве чувствительных элементов используются микромеханические датчики угловой скорости и линейного ускорения. Для измерения компонент магнитного поля используется магниторезистивный магнитометр. Магнитометр используется в качестве корректора МИИБ для компенсации погрешностей угловой ориентации, возникающих вследствие дрейфа микромеханических гироскопов. Аналоговые данные, поступающие с датчиков первичной информации, обрабатываются аналого-цифровым преобразователем высокой разрядности. Для реализации вычислительных алгоритмов в состав блока входит высокопроизводительный цифровой сигнальный процессор.
В качестве базовых чувствительных элементов в устройстве используется МИИБ, содержащий три датчика угловой скорости и три акселерометра, встроенный датчик температуры и собственный контроллер, обеспечивающий предварительную обработку сигналов гироскопов и акселерометров и выдачу ее в цифровом виде потребителям. Встроенный датчик температуры предназначен для коррекции температурных дрейфов датчиков угловой скорости и акселерометров. В качестве измерителя индукции магнитного поля используются магниторезистивные датчики. В качестве вычислителя применен цифровой сигнальный процессор Share ADSP21262LQFP.
Аппаратные средства системы управления, входящие в состав системы обеспечивают независимое управление приводов каналов крена и курса, осуществляют измерение углов курса, крена и дифферента, измерение компонент векторов угловой скорости, линейного ускорения, магнитного поля, формируют управляющие сигналы для решения целевых задач управления и стабилизации.
Основным элементом блока управления движением является микропроцессор на базе DSP-процессора, работающего под управлением встраиваемой операционной системы uCLinux.
Независимый привод каждого из каналов управления построен на основе системы привода производства компании Faulhaber. Высокоточная цифровая система управления приводом обеспечивает высокое быстродействие, позволяет регулировать параметры привода в широком диапазоне, обеспечивает точное позиционирование по углу поворота оси привода колеса.
Микромеханический инерциальный измерительный блок (МИИБ) определяет углы курса, крена и дифферента, обеспечивает систему управления инерциальной и навигационной информацией.
Блок управления движением построен на основе DSP-процессора и является устройством, обеспечивающим программную и аппаратную интеграцию отдельных блоков, входящих в состав аппаратных средств системы. Процессор позволяет выполнять операции над 32-разрядными числами в формате с плавающей запятой, что обеспечивает точность вычислений, достаточную для решения большинства задач управления и навигации. Тактовая частота процессора составляет 400 МГц. Помимо процессора в состав блока управления движением входят микросхемы памяти SDRAM, микросхемы памяти flash, микросхемы интерфейсов ввода-вывода. Такое построение системы позволяет решать в реальном времени сложные вычислительные задачи, большой объем оперативной памяти системы позволяет осуществлять реализацию ресурсоемких алгоритмов.
Различные компоненты узлов и элементов, входящих в состав дистанционно управляемого диагностического снаряда, подключены к модулю управления с помощью последовательных синхронных и асинхронных портов ввода-вывода. Контроллеры привода каналов управления подключены к модулю с помощью асинхронных портов ввода-вывода UART0 и UART1. С помощью данных интерфейсов контроллерам передаются команды, задающие режимы движения валов, а контроллеры, в свою очередь, обеспечивают модуль информацией об угловом положении валов, токах в двигателях, скорости вращения.
Микромеханическая курсовертикаль в составе МИИБ подключена к блоку управления движением с помощью синхронного последовательного порта SPORT. Вывод данных, а также управление оператором осуществляется с помощью блока, реализующего двунаправленный канал передачи данных, с помощью асинхронного интерфейса UART2. Все операции обмена между модулями и периферийными устройствами осуществляются с помощью использования механизмов DMA (прямого доступа к памяти), что позволяет, несмотря на интенсивность операций обмена данными, разгрузить ядро цифрового сигнального процессора.
Для управления ориентацией вокруг одной оси в движительном комплексе используется система привода, состоящая из двигателя постоянного тока с редуктором и магнитным энкодером и системы управления. Двигатель постоянного тока типа «Faulhaber» имеет конструкцию с полым ротором, что дает ряд преимуществ, таких как: низкое энергопотребление, отсутствие потерь в сердечнике ротора, низкое напряжение трогания, малый момент инерции ротора, позволяющие быстрые разгон и торможение, низкие массогабаритные показатели. В составе привода использован редуктор типа «Faulhaber» в исполнении со стальными шестернями для обеспечения повышенной износоустойчивости. Магнитный энкодер IE-512 обеспечивает высокое разрешение в 512 линий на оборот, что позволяет осуществлять плавное и высокоточное управление приводом.
В цифровом контроллере MCDC3003 в качестве вычислителя используется цифровой сигнальный процессор, что позволяет осуществлять высокоточное и высокоскоростное управление (0.18° - ошибка по углу, частота работы следящего контура - 100 Гц). Цифровой контроллер привода принимает по интерфейсу UART, поступающие от блока управления команды. Режимы работы привода задаются соответствующими форматами команд, при этом используются режимы управления по угловому положению (задается и поддерживается по достижении целевое угловое положение) и управления по скорости (задается величина угловой скорости вращения вала). Для настройки параметров следящего контура контроллера используют ряд параметров, таких как: максимальное угловое ускорение, максимальная угловая скорость, максимальный ток в двигателе, пропорциональный и интегральный коэффициенты цепи обратной связи по угловой скорости, пропорциональный и дифференциальный коэффициенты цепи обратной связи по угловому положению вала. Все вышеперечисленные коэффициенты могут быть подобраны исходя из заданного критерия оптимальности, и изменены в процессе работы для адаптации к изменившемуся режиму движения.
Для решения задач навигации дистанционно управляемого диагностического снаряда используются следующие варианты аппаратного обеспечения:
1. Определение координат с помощью курсовертикали.
2. Определение координат относительно реперных точек.
3. Определение координат с помощью БИНС.
Предлагаемое устройство работает следующим образом.
Посредством стационарно установленных на трубопроводе акустических датчиков регистрируют акустические сигналы, формируемые внутритрубной средой. При обнаружении акустических аномалий, посредством датчиков, расположенных на поверхности трубопровода, аналогично, как и в известном устройстве [2], определяют место повреждения. При этом в отличие от известных устройств место повреждения определяют относительно ближайших реперных точек по отношению к месту повреждения, расположенных в поперечных сварных швах с известными плановыми географическими координатами. По команде с диспетчерского пункта через шлюзовую камеру подводного трубопровода вводят дистанционно управляемый внутритрубный диагностический снаряд. Предварительно в блок управления измерительного модуля и модуля управления вводят координаты места повреждения и подают команду на движительный комплекс.
После чего управляемый внутритрубный диагностический снаряд начинает движение в сторону выявленного повреждения. По достижению места повреждения, путем сравнения установленных и выработанных инерциальной системой координатами, подается команда на модуль управления для обеспечения режима торможения и силовой блок, который фиксирует дистанционно управляемый внутритрубный диагностический снаряд на поверхности трубопровода в режиме «стоп», путем перекрытия трубопровода по его диаметру. При выявлении очага повреждения и его характера принимается решение по его локализации. Если очаг повреждения обусловлен наличием коррозии или налетами инородного вещества, то приводится в действие модуль локализации повреждений, снабженный элементами устранения повреждений, выполненных в виде резочных и фрезеровальных узлов, который также снабжен мобильным резервуаром для утилизации продукта очистки, выполненным в виде съемного резервуара из эластичного материала. Аналогом модуля локализации повреждений является устройство, приведенное в [4].
При этом, если работы по локализации очага повреждения требуют длительного периода его устранения, то измерительный модуль и модуль управления могут быть отстыкованы, посредством элемента сцепления со стыковочным узлом.
Далее, посредством измерительного модуля выполняют акустические, магнитные и профилеметрические измерения на перекрытом участке трубопровода для выявления возможных дефектов. По завершении работ по устранению выявленного повреждения, модули путем стыковки соединяются.
При движении дистанционно управляемого внутритрубного диагностического снаряда до места повреждения также посредством БИНС измеряют небольшие смещения и изгибы газопровода, причем с одинаково высокой точностью на протяжении всей трассы движения дистанционно управляемого внутритрубного диагностического снаряда. При этом в качестве реперных точек, по которым корректируются показания предыдущих, например профилеметрических измерений (посредством измерительных датчиков, представляющих собой, например, одометр), приняты поперечные сварные швы с известными географическими координатами, полученные при прокладке трубопровода.
Посредством БИНС также определяют точные угловые и линейные координаты выявленных дефектов. Кроме того, данные профилеметрической диагностики и выходные данные БИНС сочетаются в бортовой системе дистанционно управляемого внутритрубного диагностического снаряда, что значительно снижает объем последующей обработки.
При этом БИНС обеспечивает:
- точное определение угловых и линейных координат дефектов: угловые координаты - с точностью ±0,1°, положение их на участке между поперечными швами - с точностью ±20 мм;
- значительное снижение объема последующей апостериорной обработки за счет взаимной обработки (сочетания) в бортовой системе снаряда данных диагностики и данных БИНС;
- выработку значений линейной скорости дистанционно управляемого диагностического снаряда и значений изгибающих усилий в местах аномалий стенок трубы при проведении магнитной диагностики, что является дополнительной информацией, использующейся при идентификации и классификации дефектов.
При наличии существенного очага повреждения, требующего длительного времени для его устранения, силовой модуль и модуль локализации повреждений могут быть временно отстыкованы от модуля управления и измерительного модуля, которые в этот период могут проводить замеры в других точках трубопровода, с последующей обратной их стыковкой.
Полученные при этом согласованные наборы измерений можно рассматривать, как первые шаги к решению задачи управления рисками для обеспечения эксплуатационной безопасности магистрального трубопровода. Оценивая согласованные наборы данных, можно получить гораздо более точное и всестороннее понимание состояния трубопровода, позволяющее выработать оптимальную стратегию обеспечения его целостности и надежности.
Кроме того, данные профилеметрической диагностики и выходные данные БИНС сочетаются в бортовой системе дистанционно управляемого диагностического снаряда, что значительно снижает объем последующей обработки.
Корреляция данных БИНС и магнитной диагностики (также как и корреляция данных БИНС и профилеметрического датчика) обеспечивает наилучшую идентификацию дефектов. Полную же идентификацию всех возможных дефектов и аномалий трубопровода обеспечивает корреляция всех данных, полученных в процессе пробега дистанционно управляемого диагностического снаряда и зарегистрированных датчиками, установленными на корпусе трубопровода.
Использование предлагаемого устройства обеспечивает:
- значительное снижение объема последующей апостериорной обработки за счет взаимной обработки (сочетания) в бортовой системе дистанционно управляемого диагностического снаряда данных диагностики, данных БИНС и данных измерительных датчиков, установленных на корпусе трубопровода;
- выработку значений линейной скорости дистанционно управляемого диагностического снаряда и значений изгибающих усилий в местах аномалий стенок трубы при проведении магнитной диагностики, что является дополнительной информацией, использующейся при идентификации и классификации дефектов.
При практической реализации заявляемого устройства были использованы механизмы, узлы и элементы, имеющие промышленную применимость.
Источники информации
1. Патент RU №2196312.
2. Патент RU №2221230.
3. Патент WO №2006/101398, 2006.
4. Патент RU №2381841.
5. Концепция создания и эксплуатации комплексной системы мониторинга технического состояния морских участков подводного газопровода / Биндер Я.И., Добротворский А.Н., Пешехонов В.Г., Яценко С.В. // С-П.: Ассоциация «Морские технологии и безопасность», Государственный научно-исследовательский навигационно-гидрографический институт МО РФ, ЦНИИ «Электроприбор», ОАО «Электромеханика». Доклад на семинаре ОАО «Гипроспецгаз» и компании DNV по проблеме разработки нефтегазовых месторождений в арктических ледовых условиях, включая вопросы экспорта сжиженного природного газа, ноябрь 2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2432558C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ТРУБОПРОВОДАХ | 2010 |
|
RU2439551C1 |
| ПЛАТФОРМА ДЛЯ МОРСКОЙ ДОБЫЧИ НЕФТИ | 2010 |
|
RU2441129C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ТРУБОПРОВОДАХ | 2010 |
|
RU2450264C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| СПОСОБ ПОДГОТОВКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА К РЕМОНТУ И УСТРОЙСТВО ДЛЯ ПОДГОТОВКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА К РЕМОНТУ | 2010 |
|
RU2460927C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
Использование: для внутритрубной диагностики трубопроводов. Сущность: заключается в том, что модуль управления, измерительный модуль, модуль локализации повреждений и силовой модуль конструктивно выполнены в виде отдельных секций, сочлененных между собой посредством элемента сцепления со стыковочным узлом с образованием многоступенчатого внутритрубного снаряда, модуль локализации повреждений снабжен мобильным резервуаром для утилизации продукта, гидроакустический канал связи выполнен в виде трехступенчатого каскада, сформированного приемоизлучающими элементами, установленными на внутритрубном снаряде на внутренней и внешней поверхностях трубопровода преимущественно в реперных точках, расположенных в поперечных сварных швах трубопровода с известными плановыми географическими координатами. Технический результат: расширение функциональных возможностей устройства оперативной диагностики магистрального трубопровода. 1 ил.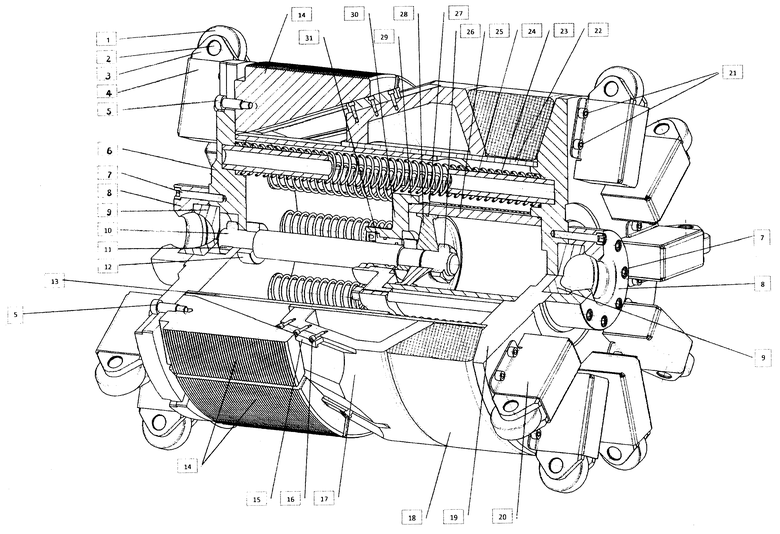
Устройство для оперативной диагностики магистрального трубопровода, включающее измерительные датчики приема акустических сигналов, расположенные вдоль трубопровода, n измерительных каналов, каждый из которых состоит из последовательно соединенных блока акустических преобразователей, блока усиления, блока фильтрации, блока аналого-цифрового преобразования, блок управления, n-канальный блок уплотнения информации, мультиплексный канал передачи информации и блок разуплотнения информации, n блоков аналого-цифрового преобразования, n-1 канальный блок накопления и анализа взаимных спектров, имеющий n входов и n-1 выходов, n-1 канальный блок обнаружения течи, n-1 канальный блок определения места течи, n-1 канальный блок определения размеров течи, n-1 канальный блок определения полосы фильтрации, блок формирования сигнала тревоги, индикатор места и размера течи, вход которого подсоединен к выходу блока формирования сигнала тревоги, при этом блок управления своими управляющими выходами и информационными входами присоединен к соответствующим управляющим и информационным входам и выходам n-канального блока уплотнения информации, блока разуплотнения информации, n-1 канального блока накопления и анализа взаимных спектров, n-1 канального блока обнаружения течи, n-1 канального блока определения места течи, n-1 канального блока определения размеров течи, n-1 канального блока определения полосы фильтрации, блока формирования сигнала тревоги и передачи его по гидроакустическому каналу связи и/или радиоканалу на диспетчерскую станцию, а также включающим измерительные датчики, размещенные на дистанционно управляемом внутритрубном диагностическом снаряде и включающие акустические, профелеметрические датчики и бесплатформенную инерциальную систему, при этом внутритрубный диагностический снаряд состоит из модуля управления, силового модуля и модуля локализации повреждений, а измерительные датчики функционально связаны между собой посредством блока управления с образованием измерительного модуля, отличающееся тем, что модуль управления, измерительный модуль, модуль локализации повреждений и силовой модуль конструктивно выполнены в виде отдельных секций, сочлененных между собой посредством элемента сцепления со стыковочным узлом, с образованием многоступенчатого внутритрубного снаряда, модуль локализации повреждений снабжен мобильным резервуаром для утилизации продукта, гидроакустический канал связи выполнен в виде трехступенчатого каскада, сформированного приемоизлучающими элементами, установленными на внутритрубном снаряде, на внутренней и внешней поверхностях трубопровода, преимущественно в реперных точках, расположенных в поперечных сварных швах трубопровода с известными плановыми географическими координатами.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА И РАЗМЕРОВ ТЕЧИ В ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2221230C2 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2000 |
|
RU2163369C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ ТРУБ И ТРУБОПРОВОДОВ | 1999 |
|
RU2149394C1 |
| ИСКУССТВЕННАЯ СТОПА ДЛЯ ПРОТЕЗОВ НИЖНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2085155C1 |
| WO 2007081197 A1, 19.07.2007. | |||

