Изобретение относится к гидрографии, в частности к способам и техническим средствам съемки рельефа дна путем определения глубин на заданной акватории с определением их геодезических координат.
Известен способ съемки рельефа дна акватории эхолотом [1], включающий прохождение судном с установленным на нем эхолотом заданными галсами на акватории, излучение гидроакустических сигналов в сторону дна, прием отраженных от дна сигналов, измерение расстояний от приемоизлучающей антенны эхолота до отражающей поверхности (точек дна), определение географических координат судна, определение геодезических координат приемоизлучающей антенны эхолота, измерение параметров бортовой, килевой и вертикальной качки, истинного курса и скорости судна, определение истинных значений глубин и их геодезических координат с последующей их регистрацией и индикацией.
Известно также устройство для осуществления данного способа, представляющее собой эхолот [2], содержащий приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления, блок регистрации, обработки картирования рельефа дна, в котором выход приемоизлучающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизлучающего блока подключены к входу блока регистрации, обработки и картирования рельефа дна, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна.
Существенными недостатками известного способа и устройства являются сравнительно невысокая точность съемки рельефа дна акватории, не удовлетворяющая предъявляемым требованиям к гидрографической съемки (см. например: Правила гидрографической службы №4 (ПГС №4 - Съемка рельефа дна, часть 2 - Требования и методы), ГУНиО МО СССР, Л., 1984), а также существенная трудоемкость выполнения способа, что обусловлено необходимостью выполнения вычислений, связанных с определением поправок за отклонение действительной средней скорости звука в воде от используемых в вычислениях расчетных значений средней скорости звука в воде для конкретного эхолота, определяемой косвенным путем по измеренным значениям температуры, солености и плотности морской воды на принятых в практике стандартных горизонтах по глубине или путем непосредственного измерения скорости звука в равномерно распределенных точках по всей площади акватории.
Ввиду того, что требуемая достоверность определения средней скорости звука расчетным путем обеспечивается только в малой локальной пространственной области, в которой измеряется температура, соленость и плотность морской воды или непосредственно скорость распространения звука в воде для конкретного эхолота, то точность съемки рельефа дна в конечном итоге отягощается погрешностью, обусловленной влиянием мелкомасштабной и крупномасштабной изменчивостью во времени ветрового перемещения и турбулентности внутренних волн, подводных течений. Эта погрешность может достигать 3% от измеряемой глубины (см., например: D.E. Dinn, B.D. Loncarevic et al. The effect of so und velocity errors on multibeam sonar depth accuracy// Proccedings of American Hydrograhic Symposium. 1995, p.1001-1009).
В соответствии с требованиями стандарта Международной гидрографической организации (см., например: Записки по гидрографии. С.-П., ГУНиО МО РФ, №248, 1999, c.27-33) на акваториях с глубинами свыше 200 м, на которых выполняется съемка в интересах безопасности судоходства, средняя квадратическая погрешность (СКП) определения глубины не должна превышать 0,3%.
При использовании известного способа съемки рельефа и устройства для его осуществления СКП определения глубины составляет для глубин до 100 м от 0,7 до 3,5 м, а для глубин до 200 м от 2,3 до 11,0 м соответственно, что не удовлетворяет предъявляемым требованиям.
При картировании рельефа дна СКП построения рельефа дна не должна превышать 0,5 мм в масштабе планшета, что в сочетании с погрешностью определения глубины известным способом и устройством для его осуществления в большинстве случаев не позволяет обеспечить и это требование.
Кроме того, при производстве съемки рельефа дна с последующим картированием рельефа дна, особенно в прибрежной зоне моря и в узкостях, необходимо иметь картографическую информацию как по суше, так и по прилегающей к ней акватории. Использование для этих целей типографских топографических и навигационных карт достаточно затруднительно. Одной из причин этого являются разные картографические проекции. Топографические карты строятся в проекции Гаусса-Крюгера, а навигационные в проекции Меркатора. Эта же причина является основным препятствием для использования растровых образов типографских карт в электронных геоинформационных системах, каковыми являются средства отображения картированной информации при выполнении съемки рельефа дна.
Задачей настоящего технического решения является повышение точности съемки рельефа дна.
Поставленная задача решается за счет того, что в способе съемки рельефа дна акватории эхолотом, установленным на судне, включающем излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин с определением поправки за отклонение действительной скорости звука в воде от расчетной, картирование полученной информации с определением геодезических координат измеренных глубин, в котором при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют в соответствии с зависимостью: ΔZv=Н(Сср/Со-1), где Н - глубина под килем (Н=ΣCiti/2), Сср=Vc4fиcosαΔfд - средняя скорость распространения звука в воде. Со - скорость распространения звука в воде, на которую рассчитан эхолот, fи - частота излучения гидроакустического сигнала гидроакустическим доплеровским лагом, Δfд - доплеровский сдвиг частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, α- угол, образованный направлением излучения гидроакустического сигнала до поверхности дна и горизонтом, Vс - скорость судна, определенная по геодезическим координатам, Сi - скорость распространения звука в воде при измерении глубин эхолотом, ti - промежуток времени между излучением сигнала и приемом эхо-сигнала от дна, при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт, а в устройство для осуществления способа, содержащее приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления и блок сбора, обработки информации и картирование рельефа дна акватории, в котором выход приемопередающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизмерительного блока подключены к входу блока сбора обработки информации и картирования рельефа дна акватории, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна, дополнительно введен блок определения средней скорости распространения звука в воде в направлении излучения гидроакустического сигнала, вход которого через блок управления соединен с выходом судового гидроакустического доплеровского измерителя скорости и выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна акватории.
Сущность изобретения поясняется чертежами (фиг.1-7). Фиг.1. Структурная блок-схема устройства. Устройство состоит из приемоизлучающей антенны 1, передающего блока 2, приемоизмерительного блока 3, блока управления 4, блока определения средней скорости распространения звука в воде 5, блока сбора, обработки информации и картирования рельефа дна 6.
Выход приемопередающей антенны 1 подключен к входу приемоизмерительного блока 3, выход передающего блока 2 соединен с приемоизлучающей антенной 1, выходы приемоизмерительного блока 3 подключены к входу блока сбора обработки информации и картирования рельефа дна 6 акватории, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления 4 соединен с передающим блоком 2, приемоизмерительным блоком 3 и блоком сбора информации, обработки и картирования рельефа дна 6, в который дополнительно введен блок определения средней скорости распространения звука в воде 5 в направлении излучения гидроакустического сигнала, вход которого через блок управления 4 соединен с выходом судового гидроакустического доплеровского измерителя скорости и выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна 6 акватории.
Приемоизлучающая антенна 1 собрана из пьезокерамических акустических преобразователей, размещенных в одном корпусе, которые используются как для излучения, так и приема отраженных от дна сигналов. В цикле излучения эти преобразователи соединены параллельно, а во время приема эхо-сигналов они работают независимо друг от друга.
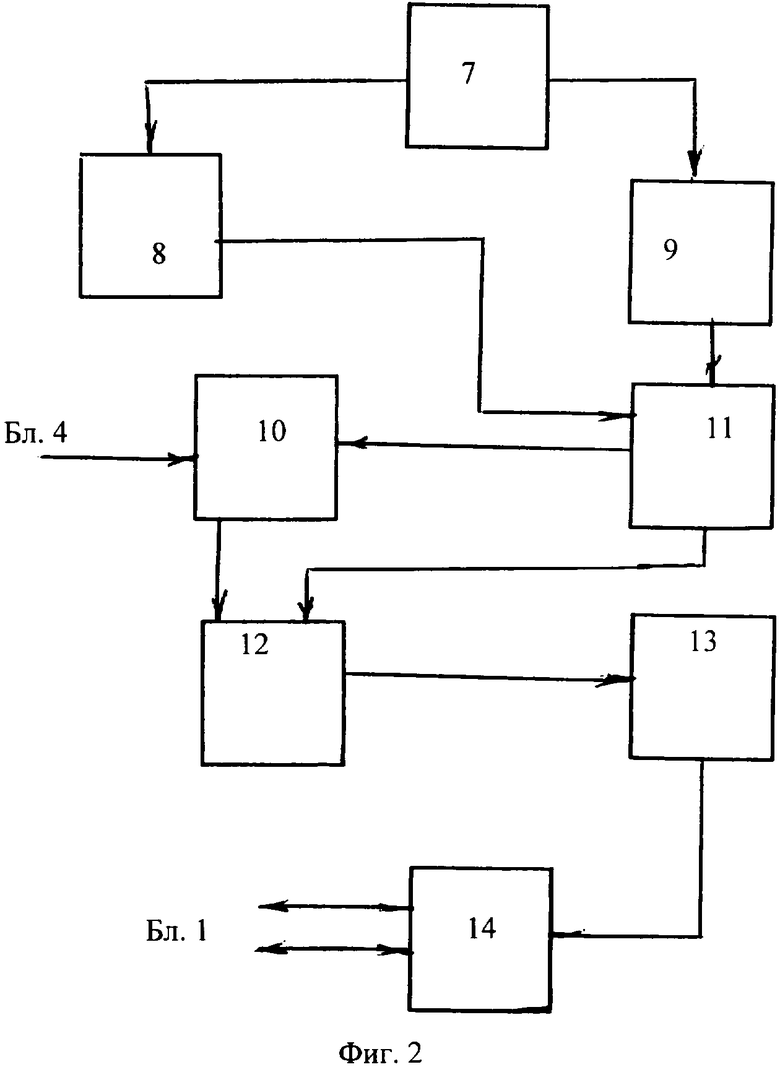
Фиг.2. Передающий блок. Передающий блок 2 состоит из кварцевого генератора 7, стабилизированного по частоте, формирователя 8 периода следования излучаемых импульсов, устройства 9 формирования длительности излучаемого импульса, синхронизатора 10, устройства квантования 11, усилителя мощности 12, преобразователя 13, коммутатора 14.
Генератор 7 вырабатывает непрерывные колебания частотой 4,8 МГц, которая посредством синхронизатора 10 снижается до 600 кГц, и формируется импульс излучения. Усилитель мощности 12 усиливает импульс до величины, необходимой для возбуждения электроакустических преобразователей антенны 1. Посредством коммутатора 14 преобразователи антенны 1 во время излучения подключаются к передающему блоку 2, а во время приема к приемоизмерительному блоку 3.
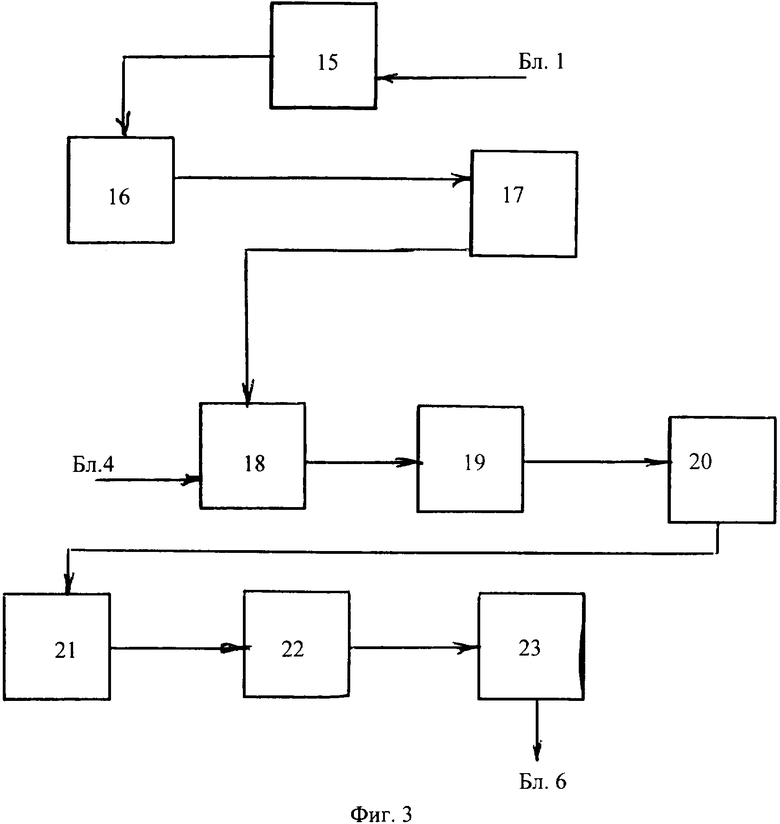
Фиг.3. Приемоизмерительный блок. Приемоизмерительный блок 3 состоит из блока полосовых усилителей 15, антенного усилителя 16, основного усилителя 17, блока формирователей кодов управления 18, блока фильтров 19, амплитудного детектора 20, фильтра 21 нижних частот, коммутатора 22, выходного усилителя 23 и предназначен для приема, усиления и частотной селекции принятых сигналов.
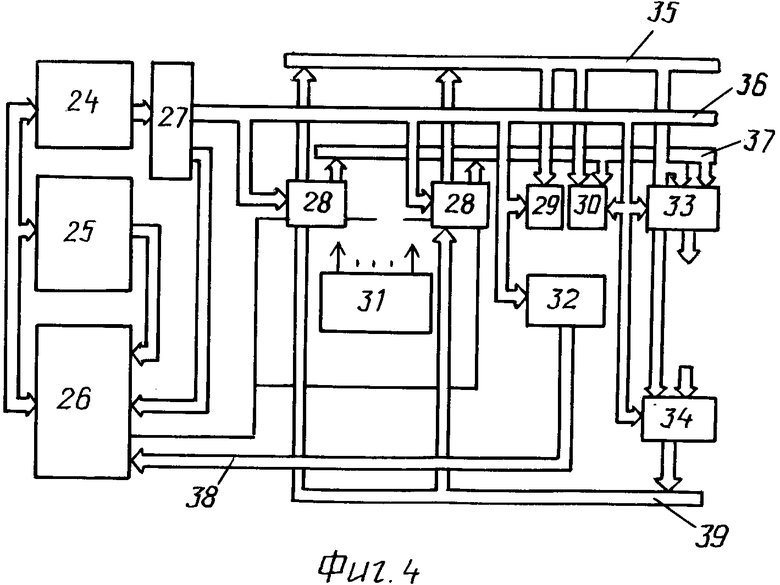
Фиг.4. Блок управления. Блок управления 4 состоит из ПЗУ микрокоманд 24, ПЗУ управления выбором адреса 25, БИС микропрограммного управления 26, регистра микрокоманд 27, двух микропроцессоров 28, ПЗУ 29, ОЗУ 30, схемы формирования переносов 31, трех буферных регистров 32, 33, 34 и пяти магистралей: магистрали адреса 35, магистрали микрокоманд 36, магистрали D 37, магистрали М 38, магистрали L 39 и предназначен для выработки и трансляции команд и информационных файлов с принимаемой от внешних источников информации, а также информации, находящейся в ПЗУ.
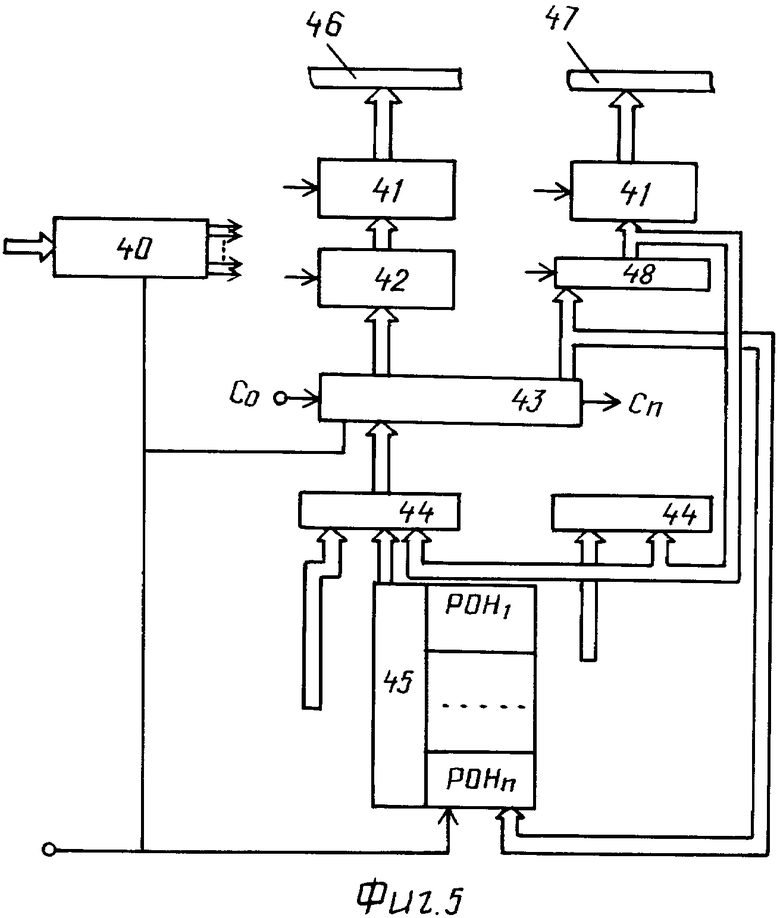
Фиг.5. Блок определения средней скорости распространения звука в воде. Блок определения средней скорости распространения звука в воде 5 состоит из дешифратора микрокоманд 40, буферных каскадов 41, регистра адреса 42, арифметико-логического устройства 43, мультиплексоров 44, дешифратора 45, магистрали А 46, магистрали D 47, аккумулятора 48.
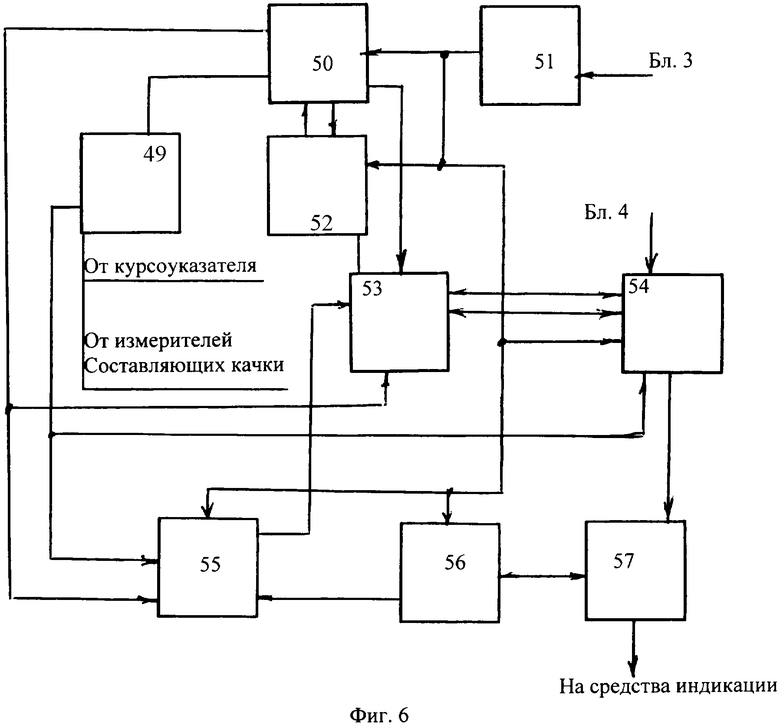
Фиг.6. Блок сбора, обработки информации и картирования рельефа дна. Блок сбора, обработки информации и картирования рельефа дна 6 состоит из приемных регистров 49, блока системной магистрали 50, усилителя 51, диспетчера памяти 52, операционного блока 53, блока управления потоком команд 54, блока микропрограммного управления 55, блока прерываний 56, выходных регистров 57.
Фиг.7. Блок-схема алгоритма сопряжения топографических и навигационных растровых карт.
Работа устройства заключается в следующем. По командным импульсам, вырабатываемым блоком управления 4 в передающем блоке 2, осуществляется формирование акустического импульса и излучение его приемоизлучающей антенной 1 в сторону дна, а также прием и преобразование в электрический сигнал отраженных дном акустических сигналов, трансляция этих сигналов на вход приемоизмерительного блока 3, в котором вырабатываются электрические сигналы, пропорциональные временным задержкам прихода отраженных от поверхности дна сигналов, по которым определяются расстояния от приемоизлучающей антенны 1 до точек отражения сигналов от морского дна.
Одновременно по командным импульсам с блока управления 4 электрические сигналы, пропорциональные доплеровскому сдвигу частоты опорного гидроакустического сигнала от судового гидроакустического доплеровского измерителя скорости (лага), аналогом которого является лаг, описанный в кн.: Абсолютные и относительные лаги. Виноградов К.А., Кошкарев В.Н., Осюхин Б.А., Хребтов А.А.//Л., Судостроение, 1990, с.30, и электричские сигналы, пропорциональные геодезическим координатам х, у, от судового приемоиндикатора спутниковой или радионавигационной системы поступают на вход блока определения средней скорости распространения звука в воде 5, в котором средняя скорость распространения звука в воде Сср определяется в соответствии с зависимостью:
Сср=Vс4fи cosα/Δfд, где Vc - скорость судна, определенная по геодезическим координатам спутниковой или радионавигационной системы, fи - частота излучения гидроакустического сигнала гидроакустическим доплеровским лагом, Δfд - доплеровский сдвиг частоты между излученным и отраженным гидроакустическими сигналами гидроакустического доплеровского лага от морского дна, α- угол, образованный направлением излучения гидроакустического сигнала до поверхности дна и горизонтом. Данная зависимость следует из того, что для конкретного четырехлучевого гидроакустического доплеровского лага типа ЛА-52, являющегося штатным измерителем скорости на гидрографических судах, скорость судна определяется в соответствии с зависимостью: Vc=Vcp/4fucosα·Δfд. Одновременно с определением скорости по лагу определяют скорость судна по геодезическим координатам, полученным по спутниковой или радионавигационной навигационным системам, в соответствии с зависимостью:
 , где Хi, Yi - геодезические координаты судна, ti - время их определения.
, где Хi, Yi - геодезические координаты судна, ti - время их определения.
Далее по командным импульсам с блока управления 4 информация с блоков 3, 4 и 5 поступает на блок сбора, обработки информации и картирования рельефа дна 6, на который также поступает информация от судовых измерителей составляющих качки и курса.
В блоке 6 определяется поправка ΔZv к глубинам, измеренным эхолотом (Н=ΣCiti/2, где Сi - скорость распространения звука в воде, ti - промежуток времени между излучением сигнала приемом эхо-сигнала от дна), за отклонение действительной скорости звука в воде от расчетной для конкретного эхолота: ΔZv=Сi (Сср/Со-1), где Сi - глубина измеренная эхолотом, Со - скорость распространения звука в воде, на которую рассчитан эхолот.
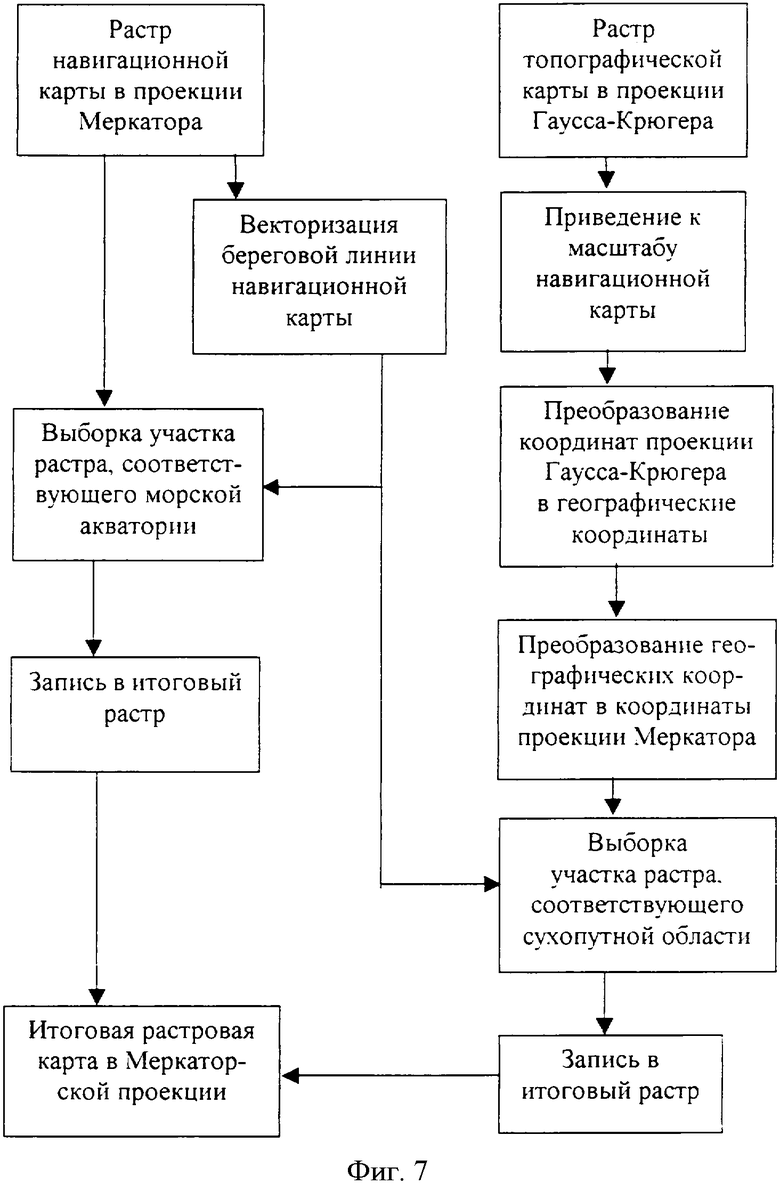
Картирование информации осуществляется нанесением геодезических координат точек отражения гидроакустических сигналов от морского дна на планшет, который строится путем сопряжения топографических и навигационных растровых карт в следующей последовательности (фиг.7):
- растр навигационной карты в проекции Меркатора подвергается векторизации береговой линии навигационной карты;
- выполняется выборка участка, соответствующего морской акватории, на которой производится съемка рельефа дна с учетом векторизации береговой линии навигационной карты;
- производится запись в итоговый растр навигационной карты;
- растр топографической карты в проекции Гаусса-Крюгера приводится к масштабу навигационной карты;
- выполняется преобразование координат проекции Гаусса-Крюгера в географические координаты;
- выполняется преобразование географических координат в координаты проекции Меркатора;
- производится выборка участка растра, соответствующего сухопутной (береговой) области;
- выполняется запись в итоговый растр топографической карты;
- по результатам записей в итоговые растры навигационной и топографической карты строится итоговая растровая карта совмещенной навигационной и топографической информации в Меркаторской проекции;
- на итоговой растровой карте, выводимой на устройство индикации, также отображается путь судна.
При использовании заявляемого способа и устройства для его осуществления, предназначенного для съемки рельефа дна акватории, выполняется требование к точности определения глубины при съемке рельефа дна акватории, установленное действующими нормативными документами, что обусловлено возможностью измерения доплеровского сдвига частоты опорного гидроакустического сигнала гидроакустического доплеровского лага, абсолютной скорости движения судна с эхолотом по внешним источникам информации (например, спутниковой навигационной системы типа GPS), по которым определяют среднюю вертикальную скорость распространения звука в водной среде.
При съемке рельефа дна эхолотом средняя квадратическая погрешность определения вертикальной скорости распространения звука не должна превышать±7,5 м/с.Выполнение данного требования может быть обеспечено, если скорость движения судна будет определяться со средней квадратической погрешностью, не превышающей±0,037 м/с, что возможно выполнить при условии определения геодезических координат со средней квадратической погрешностью, не превышающей±7,8 м. Установленные на гидрографических судах навигационные системы, в частности, совмещенные приемоиндикаторы спутниковых и радионавигационных систем берегового базирования позволяют определять геодезические координаты с точностью±6,0 м, а при их работе в дифференциальном режиме с точностью±3,0 м. При сопряжении топографических и навигационных растровых карт при картировании рельефа дна ошибки получаемой растровой карты составляют не более двух пикселей, например, для масштаба карт 1:250000 с разрешением 400 dpi это составляет 30 м на поверхности Земли, что не превышает ошибок самой растровой карты.
Практическая реализация заявляемого способа и устройства для его осуществления технической сложности не представляет ввиду того, что для его реализации используются штатные измерительные средства, установленные на гидрографических судах, предназначенных для съемки рельефа дна.
Источники информации
1. Коломийчук Н.Д. Гидрография. Л., ГУНиО МО СССР, 1988, с.240-277.
2. Hare R. Depth and position error budgets for multibeam echosounding// International Hydrographic Review. 1995, v. LXXII, №2, p.37-69.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2573626C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272303C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| СПОСОБ СТЕРЕОСЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2487368C1 |
Целью настоящего изобретения является повышение точности съемки рельефа дна. Способ съемки рельефа дна акватории эхолотом, установленным на судне, включает излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин с определением поправки за отклонение действительной скорости звука в воде от расчетной, картирование полученной информации с определением геодезических координат измеренных глубин, в котором при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют в соответствии с зависимостью: ΔΖv=Η(Cср/Со-1), где Н - глубина под килем (H=ΣCiti/2), Сср=Vс4fиcosαΔfд - средняя скорость распространения звука в воде, С0 - скорость распространения звука в воде, на которую рассчитан эхолот, fи - частота излучения гидроакустического сигнала гидроакустическим доплеровским лагом, Δfд - доплеровский сдвиг частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, α - угол, образованный направлением излучения гидроакустического сигнала до поверхности дна и горизонтом, Vc - скорость судна, определенная по геодезическим координатам, Ci - скорость распространения звука в воде при измерении глубин эхолотом, ti - промежуток времени между излучением сигнала и приемом эхо-сигнала от дна, при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт, в устройство для осуществления способа, содержащее приемоизлучаюшую антенну, передающий блок, приемоизмерительный блок, блок управления и блок сбора, обработки информации и картирования рельефа дна акватории, дополнительно введен блок определения средней скорости распространения звука в воде в направлении излучения гидроакустического сигнала. 2 н.п. ф-лы, 7 ил.
| ПРИЕМНАЯ МНОГОЭЛЕМЕНТНАЯ КОМПЕНСИРОВАННАЯ АНТЕННА ДЛЯ ГЛУБОКОВОДНОГО ФАЗОВОГО БАТИМЕТРИЧЕСКОГО ГИДРОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2209530C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2292062C2 |
| УСТРОЙСТВО ДЛЯ ИЗЛУЧЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1992 |
|
RU2010457C1 |

