Изобретение относится к устройству для удаления емкостей из установки для обработки емкостей.
К примеру, большие установки для розлива напитков имеют отдельные сосуды, которые в процессе работы должны удаляться из установки. Это происходит, к примеру, тогда, когда сосуд зажимается или опрокидывается и, в этом случае, не может транспортироваться дальше или подвергаться дальнейшей обработке. Возможным вариантом использования являются в данном случае моечные установки для очистки емкостей, к примеру, установки для промывки бутылок. Здесь предназначенные для промывки бутылки подаются по нескольким транспортирующим участкам, а затем подразделяются на множество параллельных входных направляющих установки для промывки. В зоне этих входных направляющих, в которых емкости с транспортирующих участков распределяются по направляющим, вертикально расположенные бутылки наталкиваются друг на друга и перемещаются не всегда равномерно, так что отдельные бутылки опрокидываются. В этом случае они располагаются перед направляющими и могут являться причиной неполадок. Ввиду большой ширины такого типа установок опрокинувшиеся емкости, без необходимости остановки машины, доступны непосредственно снаружи, если это вообще возможно, только лишь в кромочной зоне. Опускание установки с целью устранения данных помех может привести к остановке всей установки в целом, а тем самым к сбою производственного процесса и к увеличению издержек.
Задачей изобретения является создание такого устройства для удаления емкостей из установки для обработки емкостей, которое позволяет в процессе работы быстро и надежно удалять из установки отдельные емкости.
Изобретение реализуется посредством устройства с признаками пункта 1 формулы изобретения.
При помощи такого манипулятора емкости могут захватываться и удаляться из установки без необходимости ее остановки. К тому же можно удалять те бутылки, которые в больших установках находятся в местах, располагающихся вне зоны непосредственного захвата оператором установки.
Для этого предусмотрен манипулятор с расположенным на конце вакуумным резиновым захватом, на который может подаваться пониженное давление. Таким образом, емкость, к примеру, опрокинувшаяся бутылка, удерживается на вакуумном резиновом захвате и, таким образом, может быть удалена.
За счет выборочной подачи пониженного давления возможен простой забор емкости и ее повторное высвобождение. К тому же посредством регулирования силы пониженного давления удерживающее усилие может быть приведено в соответствие с необходимыми условиями.
Варианты осуществления изобретения очевидны из последующих зависимых пунктов формулы изобретения.
В первом варианте осуществления устройства в соответствии с изобретением манипулятор расположен на передвижном ползуне и выполнен с возможностью регулирования по длине. Ползун находится в направляющей, которая перекрывает закрываемую зону приема, так что ползун совместно с манипулятором может перемещаться в те положения, в которых емкости должны быть удалены. За счет возможности регулировки манипулятора по длине расположенные внизу бутылки могут быть подняты и вынуты наверх и, таким образом, поданы сбоку в зону разгрузки.
В целесообразном варианте зона приема является зоной входа, к примеру, машины для обработки емкостей, и зоной разгрузки в положении, в котором бутылки без помех могут быть сняты.
В принципе, ползун может перемещаться вручную посредством манипулятора.
Разумеется, предпочтительно, если это происходит автоматически.
К тому же в варианте осуществления изобретения предусмотрено устройство обнаружения, с помощью которого можно определять, когда и в каком месте емкость должна быть удалена, то есть, к примеру, когда и где бутылка опрокинулась. Это может осуществляться оптическим путем посредством сенсорных пластин или систем камер с соответствующими системами обработки изображений, или же посредством механических сенсорных устройств. Дополнительно предусмотрено устройство управления, с помощью которого после обнаружения предназначенной для удаления емкости перемещается ползун в соответствующее положение, выдвигается манипулятор в направлении емкости, и за счет активации пониженного давления захватывается емкость. В дальнейшем, с помощью устройства управления манипулятор снова может быть отведен назад и, таким образом, емкость, направляясь вверх, может быть удалена из установки. Посредством заключительного перемещения ползуна в зону разгрузки и деактивации пониженного давления емкость высвобождается, и устройство оказывается готовым для удаления последующей емкости.
В альтернативном варианте осуществления устройства в соответствии с изобретением манипулятор с расположенным на конце вакуумным резиновым захватом через шарнир соединен с трубой, которая в данном варианте осуществления выполнена с возможностью регулировки по длине. На трубе может располагаться захватывающий элемент, в случае необходимости, с устройством управления, посредством которого пониженное давление может подаваться по трубе к вакуумному резиновому захвату. Это может быть реализовано посредством пневматического соединения с управляемым вакуумным элементом.
В этом устройстве удаление емкостей из установки для обработки емкостей может осуществляться посредством действий оператора. При помощи регулируемой по длине трубной направляющей можно захватывать емкости, находящиеся на значительном удалении. Благодаря шарнирному соединению это может происходить также и в недоступных местах.
Изобретение поясняется далее более подробно на основании прилагаемых чертежей, на которых показано:
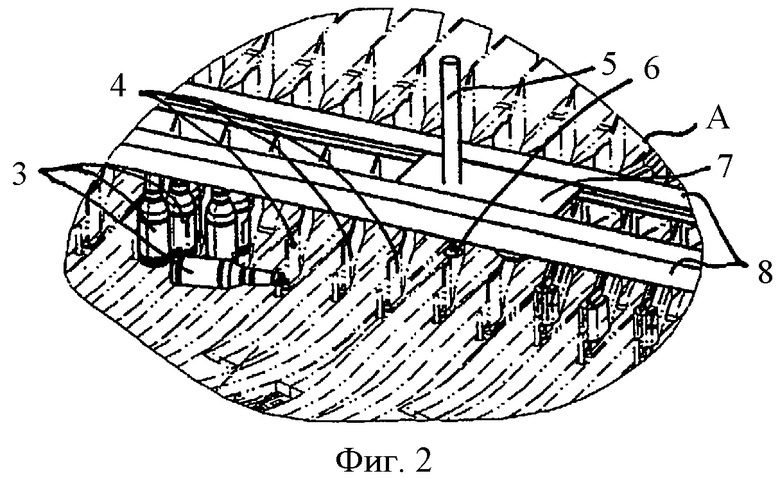
фиг.1 - схематичный в двух измерениях вид установки для обработки емкостей в первом варианте осуществления изобретения;
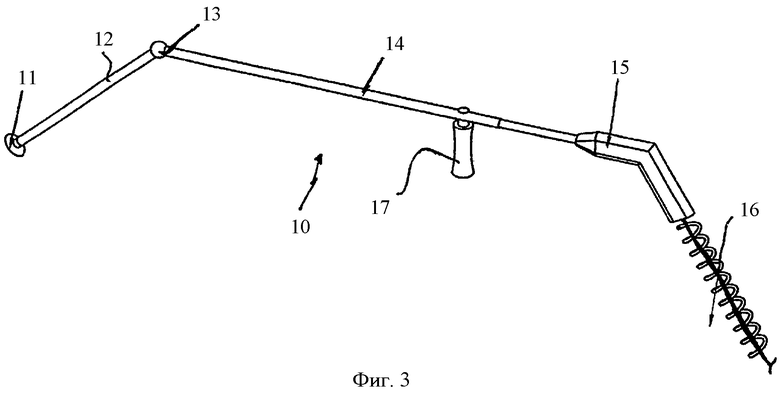
фиг.2 - обозначенная на фиг.1 зона в увеличенном масштабе, а также
фиг.3 - вид устройства в двух измерениях в соответствии с изобретением согласно второму варианту осуществления изобретения.
Зона 1 входа не изображенной более подробно установки для обработки емкостей, в данном случае, машины для промывки бутылок, представлена на фиг.1 более детально. По четырем транспортирующим участкам 2 сосуды, в данном случае бутылки 3, доставляются к машине. Установка для обработки емкостей имеет большое количество параллельных входных направляющих 4, перед которыми происходит распределение бутылок 3. Для наглядности фрагмент А представлен на фиг.2 в увеличенном масштабе. Большое количество параллельных направляющих 4 для емкостей предназначены для того, чтобы иметь возможность одновременно промывать большое количество бутылок и достигать, таким образом, высокой производительности установки.
При этом имеет место тот факт, что бутылки, как изображено на чертеже, опрокидываются и частично блокируют входные направляющие 4. В этом случае, по меньшей мере, уменьшается пропускная способность установки, так как находящиеся сзади элементы установки не могут далее снабжаться бутылками 3. Кроме того, возможно, что опрокинутые бутылки способствуют опрокидыванию других бутылок 3 или даже заклинивают и, таким образом, провоцируют неполадки в работе, вплоть до выхода установки из строя.
Для решения данной проблемы в соответствии с изобретением предусмотрен манипулятор 5, на нижнем конце которого расположен вакуумный резиновый захват 6, на который может подаваться пониженное давление. В результате этого возникает эффект всасывания, благодаря которому бутылка 3 при контакте с вакуумным резиновым захватом 6 и при приложенном пониженном давлении удерживается на вакуумном резиновом захвате 6. Манипулятор 5 выполнен с возможностью регулировки по высоте, так что вакуумный резиновый захват 6, соответственно, с находящейся на нем бутылкой 3 может перемещаться вниз и вверх.
Весь манипулятор 5 в целом расположен на выполненном с возможностью передвижения ползуне 7, который может возвратно-поступательно перемещаться по направляющей шине 8 по всей ширине зоны 1 входа установки для обработки емкостей.
Кроме того, направляющие шины 8 имеет соответственно такие размеры, что ползун 7 может проходить над разгрузочным контейнером 9, находящимся сбоку от установки.
Контроль за установкой осуществляется с помощью не представленного более детально устройства обнаружения. Оно выполнено в виде системы камер, которая посредством последовательно подключенного устройства обработки изображения контролирует надлежащее состояние зоны 1 входа и может распознавать опрокинутую бутылку 3 и место зоны 1 входа, в котором она располагается.
Также с помощью не представленного более детально устройства управления передвигается затем ползун 7 с манипулятором 5 в положение над опрокинутой бутылкой, после чего манипулятор 5 со своим вакуумным резиновым захватом 6 перемещается вниз, на вакуумный резиновый захват 6 подается пониженное давление, и затем манипулятор 5 снова перемещается вверх, причем за счет подаваемого пониженного давления опрокинутая бутылка совместно с манипулятором выводится в направлении вверх из зоны 1 входа. После этого ползун 7 при помощи устройства управления передвигается в положение над разгрузочным контейнером 9 и подача пониженного давления деактивируется, так что бутылка высвобождается и опускается в разгрузочный контейнер 9.
После этого система готова принять следующую опрокинутую бутылку и удалить ее из машины.
Если бутылки 3 опрокидываются не непосредственно перед входными направляющими 4, то они, следуя основному поступательному движению общей массы бутылок, перемещаются к входным направляющим 4, откуда затем описанным выше способом они могут удаляться из установки.
Альтернативный вариант осуществления изобретения представлен более детально на фиг.3.
Во втором варианте осуществления устройство в соответствии с изобретением выполнено в виде манипулятора 10 с ручным управлением. Оно также имеет на конце вакуумный резиновый захват 11, который посредством трубного соединения 12 и шарового шарнира 13 соединен с другим трубным соединением 14. Оно выполнено с возможностью регулировки по длине. На рукоятке 15 расположено не изображенное более детально устройство управления, которое через полое внутреннее пространство трубных соединений 12, 14 и шаровой шарнир 13 может подавать пониженное давление на вакуумный резиновый захват 11. Для этого имеется пневматическое соединение 16, которое подключается к стандартной системе обеспечения сжатым воздухом и посредством вакуумного элемента во внутреннем пространстве рукоятки 15 преобразуется в пониженное давление. За счет использования дополнительной рукоятки 17 улучшается управляемость устройством и упрощается регулировка по длине трубы 14.
Посредством данного устройства опрокинутая бутылка может простым способом удаляться из машины для обработки емкостей, к примеру, представленной на фиг.1. Для этого вакуумный резиновый захват 11 с использованием рукоятки 15 и 17 подводится оператором к предназначенной для удаления бутылке, и посредством приведения в действие элемента управления на вакуумный резиновый захват 11 подается пониженное давление. Последний захватывает бутылку сверху и способствует ее простому извлечению из установки. Таким образом, посредством устройства в соответствии с изобретением можно извлекать емкости, находящиеся в недоступных местах, без отключения установки или не создавая опасной ситуации для обслуживающего персонала.
Естественно, изобретение не ограничено описанными ранее примерами осуществления, а может быть преобразовано во многих отношениях, без потери основополагающей идеи. В частности, точное исполнение манипулятора и его движение в зоне предназначенных для удаления бутылок может изменяться. В принципе, возможны также исполнения по типу «механической руки» или использование многомерно перемещаемых систем ползунов.
ОБОЗНАЧЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЕМКОСТЕЙ (ВАРИАНТЫ) | 2006 |
|
RU2337769C2 |
| СПОСОБ ОТБОРА ПРОБ И ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ЛЕТУЧИХ ВЕЩЕСТВ ЗАГРЯЗНЕНИЙ В ЕМКОСТИ (ВАРИАНТЫ) | 1993 |
|
RU2125721C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОТБОРА ПРОБ И ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ХИМИЧЕСКИХ СОЕДИНЕНИЙ В ЕМКОСТЯХ | 1993 |
|
RU2126160C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БУТЫЛОК ИЛИ ПОДОБНЫХ ЕМКОСТЕЙ | 2009 |
|
RU2446898C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БУТЫЛОК ИЛИ ПОДОБНЫХ ИМ СОСУДОВ | 2007 |
|
RU2399438C2 |
| МАШИНА ДЛЯ НАНЕСЕНИЯ ЭТИКЕТОК НА ЕМКОСТИ | 2004 |
|
RU2280598C2 |
| СИСТЕМА ДЛЯ СТЕРИЛИЗАЦИИ ЕМКОСТЕЙ И БУТЫЛОК ИЗ ПЭТ | 2008 |
|
RU2465918C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И/ИЛИ ВЫГРУЗКИ ЕМКОСТЕЙ | 2000 |
|
RU2198835C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЕМКОСТЕЙ | 2007 |
|
RU2392070C1 |
| УПАКОВОЧНАЯ ГОЛОВКА | 2008 |
|
RU2424960C1 |
Устройство содержит манипулятор (5) с расположенным на конце и выполненным с возможностью подачи на него пониженного давления вакуумным резиновым захватом (6), выполненным с возможностью удерживания емкости (3) при подаче пониженного давления, и устройство обнаружения для распознавания предназначенных для удаления емкостей. Манипулятор расположен на выполненном с возможностью перемещения ползуне (7) и/или выполнен с возможностью регулировки по длине. Ползун при обнаружении предназначенной для удаления емкости устройством управления перемещается к ней по ширине зоны входа установки для обработки емкостей, выдвигается манипулятор в направлении емкости, подается пониженное давление на вакуумный резиновый захват (6), емкость захватывается и извлекается из потока емкостей. Обеспечивается быстрое и надежное удаление емкостей. 8 з.п. ф-лы, 3 ил.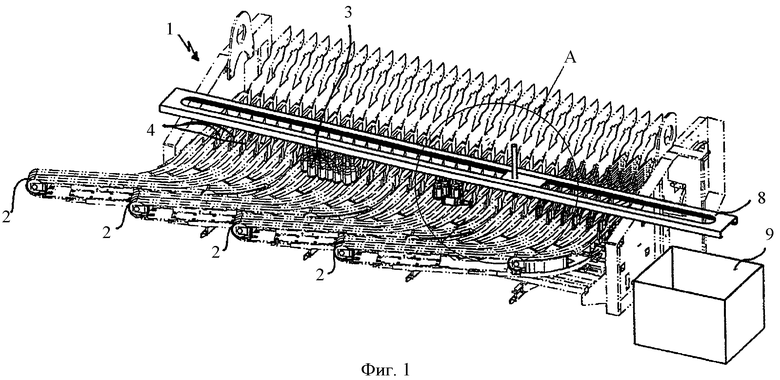
1. Устройство для удаления емкостей (3) из установки для обработки емкостей, содержащее манипулятор (5) с расположенным на конце и выполненным с возможностью подачи на него пониженного давления вакуумным резиновым захватом (6), выполненным с возможностью удерживания емкости (3) при подаче пониженного давления, и устройство обнаружения для распознавания предназначенных для удаления емкостей (3), отличающееся тем, что манипулятор (5) расположен на выполненном с возможностью перемещения ползуне (7) и/или выполнен с возможностью регулировки по длине, причем предусмотрено устройство управления, которое выполнено таким образом, что с его помощью после обнаружения предназначенной для удаления емкости (3), которая может иметь любое ориентирование, перемещается ползун (7) к предназначенной для удаления емкости (3), причем ползун перемещается по ширине зоны входа установки для обработки емкостей, выдвигается манипулятор (5) в направлении емкости (3), подается пониженное давление на вакуумный резиновый захват (6) и емкость (3) захватывается и извлекается из потока емкостей.
2. Устройство по п.1, отличающееся тем, что ползун (7) выполнен с возможностью перемещения между зоной приема и зоной разгрузки.
3. Устройство по п.2, отличающееся тем, что зона приема перекрывает зону входа для емкостей установки для обработки емкостей.
4. Устройство по п.3, отличающееся тем, что зона приема перекрывает параллельные входные направляющие (4) для емкостей установки для обработки емкостей.
5. Устройство по п.1, отличающееся тем, что устройство обнаружения выполнено в виде оптической системы распознавания, и/или в виде системы камер, и/или в виде механической системы сканирования.
6. Устройство по п.1, отличающееся тем, что устройство управления выполнено, кроме того, таким образом, что посредством его отводится манипулятор (5) назад, перемещается ползун (7) в зону разгрузки, там прекращается подача пониженного давления и, таким образом, высвобождается емкость (3).
7. Устройство по любому из пп.1-6, отличающееся тем, что манипулятор (5) через шарнир соединен с трубой.
8. Устройство по п.7, отличающееся тем, что труба выполнена с возможностью регулировки по длине.
9. Устройство по п.7 или 8, отличающееся тем, что на трубе предусмотрена, по меньшей мере, одна рукоятка (15) и/или устройство управления для подаваемого на вакуумный резиновый захват (6) пониженного давления.
| Способ оценки реперфузионного повреждения сосудистой стенки в эксперименте | 2018 |
|
RU2677471C1 |
| US 5467790 A, 21.11.1995 | |||
| US 5419350 A, 30.05.1995 | |||
| Устройство для измерения амплитуды синусоидального напряжения | 1980 |
|
SU930136A1 |
| US 5135276 A, 04.08.1992 | |||
| Гидропривод обводочного рычага и полиспаста обвязочно-формирующего устройства лесозаготовительной машины | 1971 |
|
SU596189A2 |
| US 4767142 A, 30.08.1988 | |||
| US 2004011623 A1, 22.01.2004 | |||
| ЗАХВАТЫВАЮЩЕЕ УСТРОЙСТВО С ПНЕВМОПРИСОСОМ И УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК К УПАКОВОЧНОМУ КОЛЕСУ | 1999 |
|
RU2216498C2 |
| Устройство для укладки в тару штучных предметов | 1973 |
|
SU540562A3 |
| Конвейерная система | 1985 |
|
SU1283171A1 |

