Изобретение относится к военной технике, а именно к способам функционирования мобильных комплексов навигации и топопривязки, и может быть использовано для оперативного автоматизированного определения геодезических данных в заданных точках и на заданных маршрутах движения.
Известен «Учебник сержанта ракетных войск и артиллерии Сухопутных войск» для командиров топогеодезических отделений и топопривязчиков, книга 4, утвержденный командующим ракетными войсками и артиллерией Сухопутных войск, под редакцией В.В.Бурова (стр.56-84). М.: Воениздат, 1975.
В учебнике изложены основы (способ) определения геодезических данных топогеодезическими подразделениями и машинами топопривязки, принятые за прототип. Топопривязчики предназначены для выполнения топогеодезической привязки стартовых и огневых позиций, пунктов, постов и позиций средств артиллерийской разведки для вождения колонн войск ночью и в других условиях, затрудненных для ориентирования, нанесения на карту не обозначенных на карте дорог и для передачи дирекционных углов ориентирных направлений.
Топопривязчик автоматически определяет координаты точек местности при помощи навигационной аппаратуры, принцип работы которой заключается в непрерывном вырабатывании приращений координат и суммировании их с координатами предыдущей точки. Эта задача решается с помощью специального счетно-решающего устройства (курсопрокладчика). Для получения текущих координат точек маршрута от системы подачи пути (датчика пути) в счетно-решающее устройство поступают данные об отрезках пути ΔS, пройденных машиной, а выработка дирекционного угла α направления продольной оси машины в каждой точке маршрута обеспечивается курсоуказателем. Кроме того, в состав топопривязчика входят визир ориентирования, источники питания, приборы электрооборудования, гирокомпас, выносные топогеодезические приборы и радиостанция.
Способ определения геодезических данных расчетом топопривязчика включает в себя следующие этапы:
- подготовку топопривязчика к работе;
- проведение ориентирования топопривязчика на начальной точке - определение дирекционного угла машины и координат начальной точки;
- определение расчетом топопривязчика геодезических данных на маршруте;
- определение расчетом топопривязчика координат цели.
Недостатками способа определения геодезических данных расчетом топопривязчика, взятого за прототип, являются:
- необходимость наличия разветвленной топогеодезической сети для проведения качественной топогеодезической привязки;
- высокая погрешность при определении навигационных параметров, напрямую зависящая от пройденного топопривязчиком пути и погрешности начального ориентирования;
- необходимость проведения большого количества контрольных замеров для обеспечения требуемой точности;
- низкий уровень технических средств, применяемых в топопривязчике;
- низкая степень автоматизации выполнения геодезических измерений, приводящая к высокому уровню погрешностей.
Предлагаемым изобретением решается задача по повышению эффективности топогеодезического обеспечения Сухопутных войск.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа автоматизированного определения геодезических данных с помощью универсального топопривязчика (УТП), оснащенного современными аппаратными средствами, определяющего оптимальный алгоритм выполнения работ по оперативному автоматизированному определению геодезических данных в заданных точках и на заданных маршрутах движении УТП, а также технические допуски при их выполнении.
Указанный технический результат достигается тем, что в предлагаемом способе автоматизированного определения геодезических данных (ГД) с помощью универсального топопривязчика (УТП), включающем в себя операции по подготовке к работе, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, определение геодезических данных на маршруте, определение координат цели, новым является то, что выполнение поставленных задач осуществляется в трех основных автоматизированных режимах работы УТП: «Контроль», «Настройка», «Работа», производимых в указанной последовательности; состав проверяемой аппаратуры при автоматической проверке технического состояния в режиме «Контроль» определяется оператором, в режиме «Настройка» выполняются две задачи: «Определение и ввод формулярных поправок», «Проверка и коррекция формулярных поправок»; задача «Определение и ввод формулярных поправок» включает следующие работы: определение и ввод формулярных поправок навигационной системы (НС): поправок Δβ, Δψ к измеряемым углам наклона, значения скорости собственного ухода гироскопа ωГ, румбовых поправок Δα и коэффициента KДС, определение и ввод формулярных значений поправок на установку НС ΔαГК, визира (В) ΔαВ и цены импульса датчика скорости (ДС) δS; в режиме «Работа» выполняются две задачи: задача «Определение ГД на маршруте», включающая выполнение операции по привязке УТП к исходному пункту (ИП) и маршу по маршруту с определением ГД, задача «Определение координат цели», состоящая в решении прямой геодезической задачи по определению координат цели XЦ, YЦ, HЦ; операция по привязке УТП к ИП заключается в выполнении процедуры ввода исходных данных: плоских прямоугольных координат ИП XИП, YИП, высоты над уровнем моря центра ИП HИП, высоты визирной цели над центром ИП hВЦ, горизонтального угла визирования на ИП (по визиру) αГ, вертикального угла визирования на ИП (по визиру) αВ, расстояния до визирной цели ИП (по визиру) D, в вычислении промежуточных значений: сближения меридианов на ИП YИП, азимута с визира на ИП АИП, предварительных значений координат точки привязки Х′ТП, Y′ТП, сближения меридианов на точку привязки YТП, в вычислении окончательных значений координат точки привязки ХТП, YТП, в вычислении высоты точки привязки НТП; марш по маршруту с определением ГД заключается в подготовке к движению, которая состоит из процедуры ввода исходных данных - координат точек привязки УТП X0, Y0, H0, начального ориентирования - определения начального дирекционного угла (азимута) динамической оси УТП, выполняемого автономно с помощью НС или с помощью В, и автоматического измерения параметров атмосферы: давления P0 и температуры Т0, в собственно движении по маршруту, при котором производится счисление геодезических координат, которое включает обработку исходных данных в начальной точке маршрута: плоских прямоугольных координат X0, Y0, высоты над уровнем моря H0, дирекционного угла динамической оси УТП α0, преобразование плоских прямоугольных координат X0, Y0 в геодезические B0, L0 и дирекционного угла α0 в азимут A0, вычисление текущих геодезических координат Bi, Li и азимута Ai+1 в I-м цикле измерений, преобразование текущих геодезических координат Bi, Li в плоские прямоугольные Xi, Yi и азимута Ai+1 в дирекционный угол αi+1.
Выполнение поставленных задач в трех основных автоматизированных режимах работы: «Контроль», «Настройка», «Работа», производимых в указанной последовательности, позволяет последовательно выполнять подготовительно-диагностические, контрольные операции по проверке технического состояния аппаратуры, выполнение операций по техническому обслуживанию УТП и в дальнейшем проведение операций по определению ГД на маршруте и координат цели.
Определение состава проверяемой аппаратуры при автоматической проверке технического состояния в режиме «Контроль» оператором позволяет ему изменять состав проверяемой аппаратуры в зависимости от выполняемых задач, частоты использования конкретных приборов и т.п.
Выполнение в режиме «Настройка» двух задач: задачи «Определение формулярных поправок» и задачи «Проверка и коррекция формулярных поправок», позволяет зафиксировать в вычислительном комплексе УТП формулярные поправки при вводе изделия в эксплуатацию, при регламентируемых технических обслуживаниях, при замене и восстановлении приборов, вызывающих изменение значений формулярных поправок.
Включение в задачу «Определение и ввод формулярных поправок» следующих работ: определение и ввод формулярных поправок НС: поправок Δβ, Δψ к измеряемым углам наклона, значения скорости собственного ухода гироскопа ωГ, румбовых поправок Δα и коэффициента KДС, определение и ввод формулярных значений поправок на установку ИНС ΔαГК, визира ΔαВ и цены импульса ДС δS, позволяет обеспечить необходимую точность определения ГД в процессе использования УТП.
Выполнение в режиме «Работа» задачи «Определение ГД на маршруте», включающей выполнение операции по привязке УТП к ИП и маршу по маршруту с определением ГД, позволяет обеспечить непрерывное автоматическое определение ГД аппаратурой УТП в условиях практического применения.
Выполнение в режиме «Работа» задачи «Определение координат цели», состоящей в решении прямой геодезической задачи по определению координат цели XЦ, YЦ, HЦ, позволяет обеспечить определение координат элементов боевого порядка войск, ориентирных пунктов и других неподвижных объектов, находящихся в прямой видимости с УТП на расстоянии 50-300 м.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
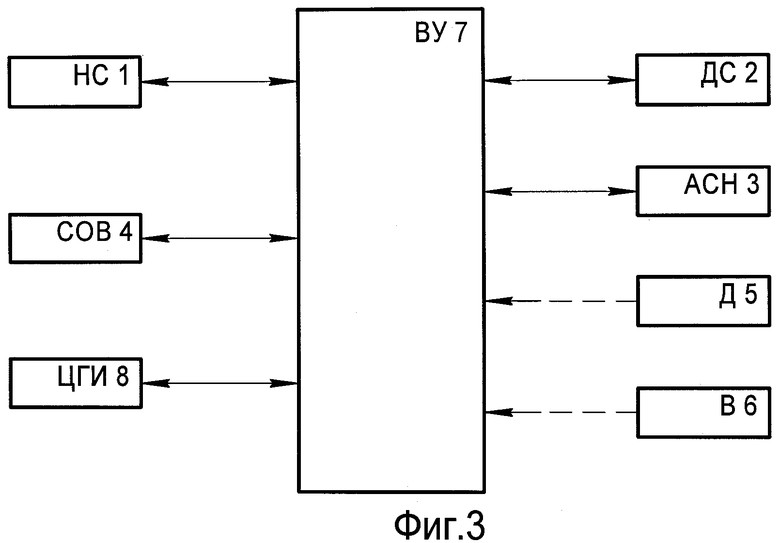
Сущность изобретения поясняется чертежами, где на фиг.1 показан алгоритм определения ГД с помощью УТП; на фиг.2 - список задач, выполняемых в режиме «Работа», на фиг.3 - структурная схема аппаратуры по определению ГД УТП.
Эксплуатационный алгоритм использования УТП определяется руководящими документам по организации и работе топогеодезических подразделений Сухопутных войск.
Технология работ УТП осуществляется в соответствии с алгоритмом, сформированным в соответствии с данным способом определения ГД с помощью УТП.
К ГД данным относятся:
- плоские прямоугольные координаты Гаусса-Крюгера (X, Y) - в системах СК-42, СК-95, МГС-84;
- высота над уровнем моря (Н) в Балтийской системе;
- дирекционный угол ориентирного направления αОРН.
В состав УТП входит следующая основная аппаратура, обеспечивающая определение ГД: НС 1 - навигационная система, ДС 2 - датчик скорости, АСН 3 - аппаратура спутниковой навигации, СОВ 4 - система определения высоты, Д 5 - дальномер, В 6 - визир, ВУ 7 - вычислительное устройство, ЦГИ 8 - индикатор графический цифровой.
Основными режимами работы УТП, обеспечивающими выполнение задачи определения ГД, являются: «Контроль», «Настройка», «Работа». Режимы выполняются в указанной последовательности. Переход к последующему режиму возможен только после проведения предыдущего. Режим «Контроль» первоначально задается автоматически с включением аппаратуры УТП.
Ввод ГД в ВУ 7, их отображение при выводе на индикатор ЦГИ 8 производится в системе плоских прямоугольных координат.
Счисление координат в движении производится в геодезической системе координат СК-42 с целью исключения необходимости редукции измеряемых расстояний на плоскость проекции Гаусса-Крюгера и перевычисления плоских прямоугольных координат при переходе из одной координатной зоны в другую.
1. Режим «Контроль»
В режиме «Контроль» выполняется автоматическая проверка технического состояния аппаратуры определения ГД. Контроль проводится каждый раз перед началом работы. При необходимости оператор может изменять состав проверяемой аппаратуры. Ход контроля отражается на индикаторе ЦГИ 8 путем обратного отсчета времени проверки каждой составной части аппаратуры. По окончании проверки каждой составной части аппаратуры на индикаторе появляется информация о ее результатах.
Причем при отрицательных результатах контроля возможность перехода в выбранный режим блокируется до устранения причин, указанных в результатах контроля.
2. Режим «Настройка»
Режим «Настройка» включает две задачи: «Определение и ввод формулярных поправок»; «Проверка и коррекция формулярных поправок».
Задача «Определение и ввод формулярных поправок» включает следующие работы: определение и ввод формулярных поправок НС 1; определение и ввод формулярных значений поправок на установку НС 1, В 6 и цены импульса ДС 2.
Определение и ввод формулярных поправок НС 1 включает: определение поправок Δβ, Δψ к измеряемым углам наклона; определение формулярного значения скорости собственного ухода гирокомпаса ωГ; ввод румбовых поправок Δαi и коэффициента KДС.
Определение поправок Δβ, Δψ производится на специально подготовленной площадке с известными средними квадратическими погрешностями не более 1' значениями β0 и ψ0 углов наклона в продольном и поперечном направлениях, не превышающих 3°, и заключается в сравнении с углами наклона β и ψ, измеренными с помощью НС 1.
УТП устанавливается на площадке так, чтобы его продольная ось располагалась вдоль продольной оси площадки. Исходные данные (значения углов наклона площадки β0 и ψ0), выбираемые из паспорта на площадку, вводятся оператором в ВУ 7 с помощью ЦГИ 8.
Измерения углов наклона β и ψ площадки, ввод их значений в ВУ 7 и вычисление формулярных поправок выполняется автоматически по команде оператора.
Вычисление производится по формулам:
Δβ=β0-β;
Δψ=ψ0-ψ.
Определение формулярного значения скорости собственного ухода гироскопа ωГ производится на неподвижном УТП в месте стояния с координатой X, известной с погрешностью не более 1000 м, и углом наклона η, не превышающим 6°. Угол наклона вычисляется по формуле:

Измерения заключаются в определении значений ωГ при различных по азимуту положениях азимутальной части гироблока НС 1. Азимутальная часть гироблока программно устанавливается в 6-ти последовательных (через 60°) румбах. На каждом румбе значение ωГ вычисляется по формуле:

где ω3=72,92·10-6 рад/с - угловая скорость вращения Земли;
n - число циклов измерений на каждом румбе;
i - номер цикла измерений;
αi - значение отсчета в i-м цикле измерения, рад;
τ - длительность цикла измерения, с;
j - номер румба.
Формулярное значение скорости собственного ухода гироскопа ωГ вычисляется как среднее из значений ωГj
Значения румбовых поправок Δαi и коэфициента KДС выбираются из паспорта на НС 1 и записываются в ПЗУ ВУ 7. Автоматически вычисляется и записывается в ПЗУ (печатно-записывающее устройство) контрольная сумма

Определение и ввод формулярных значений поправок на установку НС 1 ΔαГК, В 6 ΔαВ относительно динамической (продольной) оси УТП и цены импульса ДС 2 δS проводится на специально оборудованном мерном участке.
Значение δS выводится из отношения известной длины мерного участка к числу импульсов, полученных с ДС 2 при проезде по мерному участку.
Поправками ΔαГК, ΔαВ являются углы между направлениями начал отсчета НС 1 и В 6 и динамической оси УТП соответственно. Значения ΔαГК и ΔαВ выводятся как разности значений дирекционных углов продольной оси мерного участка, вычисленных по известным и измеренным аппаратурой УТП координатам концов мерного участка при использовании для начального ориентирования НС 1 и В 6 соответственно.
Значения δS, ΔαГК и ΔαВ определяются из заездов УТП по мерному участку с пересечением его концов. При установке УТП на мерном участке проверяется ввод формулярных поправок, вводятся исходные данные и проводится начальное ориентирование. Заезд УТП по мерному участку заключается в прямолинейном движении УТП. В процессе движения производится счисление координат и подсчет импульсов ДС 2. В момент пересечения конца мерного участка прекращается счисление координат и подсчет импульсов ДС 2, на индикаторе ЦГИ 8 появляются значения XК, YК, S0, значения Х′К, Y′К измеренных координат конца мерного участка, значения N числа импульсов ДС.
Вычисление поправки ΔαГК(ΔαВ) выполняется по формулам:
ΔαГК(ΔαВ)=α0-α, если (α0-α)≥0°;
ΔαГК(ΔαВ)=α0-α+360°, если (α0-α)<0°,
где


Значения δS вычисляется по формуле:

Далее вычисляются средние значения δS, ΔαГК и ΔαВ из n заездов, которые записываются в ПЗУ ВУ 7:

Далее проводится контрольный заезд с целью проверки правильности определения значений δS, ΔαГК и ΔαВ, заключающийся в определении координат конца мерного участка с учетом записанных в ПЗУ ВУ 7 значений δS, ΔαГК и ΔαВ и сравнения значений этих координат с известными значениями координат мерного участка.
Определение поправок ΔαГК (ΔαВ) и цены импульса δS считается правильным, если в результате контрольного заезда выполняется условие:
 ,
, 
При последующих калибровках сохраняются текущие формулярные значения поправок δS, ΔαГК и ΔαВ. При этом новые значения δS, ΔαГК и ΔαВ вычисляются по формулам:
ΔαГК(ΔαВ)=Δαф ГК(Δαф В)+Δα,
где Δαф ГК (Δαф В) - текущие формулярные значения ΔαГК (ΔαВ);
Δα=α0-α;

Задача «Проверка и коррекция формулярных поправок» выполняется оператором. Проверка ввода формулярных поправок в ВУ 7 проводится путем сверки значений поправок аппаратуры УТП с их значением в формуляре. При необходимости оператор приводит значения поправок, записанных ВУ 7, в соответствие с формуляром УТП.
3. Режим «Работа»
Режим «Работа» включает две задачи: «Определение ГД на маршруте» и «Определение координат цели».
К ГД, определяемым в точках маршрута, относятся: координаты X, Y и высота Н. Задача «Определение ГД на маршруте» включает следующие операции: привязка УТП к исходному пункту, марш по маршруту с определением ГД.
Привязка УТП к ИП заключается в определении исходных (начальных) координат (X0, Y0, H0) в точке привязки. При возможности установки УТП на центр ИП привязка выполняется наездом. Центр ИП должен располагаться над В 6. В этом случае координаты ИП принимаются за исходные. При невозможности привязки УТП к ИП наездом привязка выполняется дистанционно с помощью НС 1 и В 6. За точку привязки принимается точка на поверхности Земли, расположенная под визиром на расстоянии 50÷300 м от ИП. Операция привязки УТП к ИП выполняется по следующему алгоритму:
а) исходные данные, вводимые в ВУ 7: плоские прямоугольные координаты ИП (XИП, YИП), высота над уровнем моря центра ИП HИП, высота визирной цели над центром ИП hВЦ, горизонтальный угол визирования на ИП (по визиру) αВ, вертикальный угол визирования на ИП (по визиру) αг, расстояние до визирной цели ИП (по визиру) D;
б) вычисление промежуточных значений:
- вычисление сближения меридианов на ИП по формуле:
YИП={[YИП-(10×n-5)×105]/6367558}×tg(XИП/6367558),
где YИП·10-6=n+α;
n - целая часть числа,
- вычисление азимута с визира на ИП по формуле:
AИП=A0-ΔαВ-ΔαГ,
где A0 - азимут динамической оси УТП, определенный с помощью НС 1,
- вычисление предварительных значений координат точек привязки по формулам:
Х'ТП=ХИП-D·cosαВ·cos(AИП-YИП);
Y′ТП=YИП-D·cosαВ·cos(AИП-YИП),
- вычисление сближения меридианов на точку привязки по формуле:
YТП={[YТП-(10×n-5)×105]/6367558}×tg(XТП/6367558);
в) вычисление окончательных значений координат точек привязки по формулам:
ХТП=ХИП-D·cosαВ·cos(AИП-YТП);
YТП=YИП-D·cosαВ·cos(AИП-YТП);
г) вычисление высоты точек привязки по формуле:
HТП=HИП+hВЦ-D·sinαB-2,3.
Марш по маршруту с определением ГД включает подготовку к движению и само движение по маршруту.
Подготовка к движению состоит из ввода в ВУ 7 исходных данных, начального ориентирования и измерения параметров атмосферы:
а) Исходными данными являются координаты (X0, Y0, H0) точки привязки УТП. При привязке УТП к ИП наездом за координаты УТП принимаются координаты ИП, которые вводятся в ВУ 7 оператором. При дистанционной привязке УТП к ИП используются координаты точки привязки, определенные в результате привязки и записанные в ВУ7.
б) Начальное ориентирование заключается в определении начального (исходного) дирекционного угла (азимута) динамической оси УТП и выполняется одним из способов: автономно с помощью НС 1 или с помощью В 6, используя значение известного дирекционного угла (азимута) ориентирного направления.
При использовании НС 1 азимут динамической оси УТП вычисляется автоматически (после ввода данных) по формуле:
A0=α0+Δα+ΔαГК,
где α0 - азимут «электрического нуля» (начала отсчета) НС 1, получаемый в режиме гирокомпаса с учетом передаваемого из вычислителя кода К, вычисляемого по формуле:
где  - вертикальная составляющая угловой скорости Земли, град/ч;
- вертикальная составляющая угловой скорости Земли, град/ч;
ωГ - угловая скорость собственного ухода гироскопа (из ПЗУ ВУ 7), град/ч;
KДС - формулярный коэффициент (из ПЗУ ВУ 7), град/ч·В;
 ;
;
 ;
;
 ;
;
Определение a 0 проводится двумя последовательными измерениями (24 мин и 6 мин). Между измерениями НС 1 переводится на 1 мин в режим хранителя. Если разность между измерениями Δa 0 не превысит 11′, то окончательное значение a 0 вычисляется как среднее из двух измерений. Если разность между измерениями Δa 0 превысит 11′, то автоматически проводится третье измерение (6 мин), и окончательное значение a 0 вычисляется как среднее из трех измерений, если разность между измерениями Δa 0 между любыми из трех измерений не превысит 22′. Если разность между измерениями Δa 0 превысит 22′, то это значение выводится миганием на индикатор ЦГИ 8 и решается вопрос о продолжении работ или замене НС 1;
ΔαГК - формулярная поправка (из ПЗУ ВУ 7);
Δα=Δαi+(Δαi+1-Δαi)·(a 0/6-n) - румбовая поправка,
где n - целая часть числа a 0/6;
Δαi, Δαi+1 - формулярные румбовые поправки, соответствующие ближайшим меньшему и большему по отношению к α0 значениям азимута, соответственно.
При использовании В 6 УТП устанавливается на контрольную точку, закрепляющую ориентирное направление так, чтобы В 6 располагался строго над контрольной точкой. Азимут динамической оси УТП вычисляется автоматически (после ввода в ВУ 7 значений дирекционного угла ориентирного пункта и измеренного горизонтального угла визирования на ориентирный пункт) по формуле:
A0=αОРП-αГ+ΔαВ+γ0,
где αГ - горизонтальный угол визирования на ориентирный пункт (по визиру);
ΔαВ - формулярная поправка (из ПЗУ ВУ 7);
γ0={[Y0-(10×n-5)×105]/6367558}×tg(X0/6367558) - сближение меридианов.
Значение αГ вычисляется как среднее из двух измерений. Разность значений из двух измерений αГ не должна превышать 1 д.у.
Значение A0 используется при счислении координат. На индикатор ЦГИ 8 выводится значение исходного дирекционного угла:
α0=A0-γ0.
в) Измерение и запись параметров атмосферы (давление P0 и температуры T0) выполняется автоматически с помощью СОВ 4 по команде оператора.
После отображения на индикаторе ЦГИ 8 значений X0, Y0, H0, α0, P0, T0 появляется сообщение о готовности УТП к движению.
Движение по маршруту начинается только после получения сообщения о готовности УТП. В процессе движения производится счисление геодезических координат по измеряемым аппаратурой текущим значениям азимута (Ai) динамической оси УТП и приращения пути (ΔSi).
Значение Ai вычисляется по формуле:
Ai=A0+ΔAi+(ωЗ·sinBi-ωГ)·ti,
где ΔAi - приращение азимута относительно исходного;
ω3 - угловая скорость вращения Земли;
Bi - текущее значение геодезической широты;
ti - время с начала измерений (движения).
Значение ΔSi вычисляется по формуле:
ΔSi=Ni·δS,
где Ni - количество импульсов ДС в i-м цикле измерений;
δS - формулярное значение цены импульса ДС (из ПЗУ ВУ 7).
Счисление координат выполняется по следующему алгоритму:
а) Исходные данные в начальной точке маршрута: X0, Y0 - плоские прямоугольные координаты, H0 - высота над уровнем моря, α0 - дирекционный угол динамической оси УТП.
б) Преобразование плоских прямоугольных координат X0, Y0 в геодезические B0, L0 и дирекционного угла α0 в азимут А0:
- вычисление промежуточных значений:
YУТП·10-6=n+α;









- вычисление геодезических координат:
B0=(b5×z2-1)×b2×z2+BX;
L0=L′0+1;
- вычисление сближения меридианов:
γ=arctg(tgl0×sinB0);
- вычисление азимута:
A0=α0+γ;
в) Вычисление текущих геодезических координат Bi, Li и азимута Ai+1 в i-м цикле измерений:
- вычисление промежуточных значений


где βi - продольный угол наклона в i-м цикле измерений (с НС 1);
ΔSi - приращение пути за i-й цикл измерений;
Bi-1 - геодезическая широта, вычисленная в предыдущем цикле измерений;
 - высота над уровнем моря в предыдущем цикле измерении;
- высота над уровнем моря в предыдущем цикле измерении;
где Ai - азимут продольной оси УТП в i-м цикле измерений.





- вычисление координат:
Bi=B′i-d;
Li=L′i-1-l,
где Li-1 - геодезическая долгота в предыдущем цикле измерений.
Вычисление азимута для последующего цикла измерений:
Ai+1=Ai+c.
г) Преобразование текущих геодезических координат Bi, Li в плоские прямоугольные Xi, Yi и азимута Ai+1 в дирекционный угол αi+1:
- вычисление промежуточных значений:
 ;
;

 ;
;
 ;
;


где n - целая часть числа;
α - дробная часть числа.
- вычисление плоских координат:
Xi=[(α4×l2+0,5)×l2×N-α0]×sinBi×cosBi+6367558,5×Bi;
Yi[(α5×l2+α3)×l2+1]×l·N·cosBi×cosBi+(10·n+5)·105;
- вычисление дирекционного угла:
αi+1=Ai+1-γ.
Задача «Определение координат цели» выполняется на стоянке УТП и заключается в решении прямой геодезической задачи, исходными данными которой являются: координаты УТП (Х0, Y0, H0), дирекционный угол направления с визира на цель (αЦ), горизонтальное проложение (SЦ) между визиром и целью.
Координаты Х0, Y0 определяются в результате их счисления на марше. Высота Н определяется с помощью СОВ 4 в точке стояния УТП в конце марша. Дирекционный угол αЦ вычисляется автоматически после ввода в ВУ 7 измеренного визиром значения горизонтального угла визирования на αГ по формуле:
αЦ=α0+ΔαВ+αГ,
где α0 - дирекционный угол динамической оси УТП в месте стояния, определенный в ходе марша (с ВУ 7);
Δαв - формулярная поправка (с ПЗУ ВУ 7).
Кроме того, значение α0 с большей точностью, но и с большей затратой времени, может быть получено с помощью НС 1.
Горизонтальное проложение SЦ вычисляется автоматически после ввода в ВУ 7 измеренных с помощью В 6 значений наклонной дальности до цели DЦ и вертикального угла визирования на αB по формуле:
SЦ=DЦ·cosαB.
Координаты цели вычисляются по формулам:
XЦ=X0+SЦ·cosαЦ;
YЦ=Y0+SЦ·sinαЦ.
Высота цели вычисляется по формуле:
HЦ=H0+DЦ·sinαB+2,3.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа автоматизированного определения геодезических данных с помощью универсального топопривязчика (УТП), оснащенного современными аппаратными средствами, определяющего оптимальный алгоритм выполнения работ по оперативному автоматизированному определению геодезических данных в заданных точках и на заданных маршрутах движении УТП, а также технические допуски при их выполнении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| СПОСОБ СОГЛАСОВАНИЯ ОСЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С ОСЬЮ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436043C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| ТОПОПРИВЯЗЧИК | 2015 |
|
RU2591113C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС | 2014 |
|
RU2573247C1 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ ВЫСОКОГО КЛАССА ТОЧНОСТИ | 2012 |
|
RU2500990C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |

Изобретение относится к измерительной технике, а именно к способам функционирования мобильных измерительных комплексов навигации и топопривязки, и может быть использовано для оперативного автоматизированного определения геодезических данных в заданных точках и на заданных маршрутах движения. Технический результат - расширение функциональных возможностей. Для достижения данного результата способ автоматизированного определения геодезических данных с помощью универсального топопривязчика (УТП) включает операции подготовки к измерениям, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, определение геодезических данных на маршруте, определение координат цели. При этом выполняют в автоматизированном режиме три операции: «Контроль», «Настройка» и «Работа», производимые в заданной последовательности. 3 ил.
Способ автоматизированного определения геодезических данных (ГД) с помощью универсального топопривязчика (УТП), включающий в себя операции по подготовке к работе, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, определение геодезических данных на маршруте, определение координат цели, отличающийся тем, что выполнение поставленных задач осуществляется в трех основных автоматизированных режимах работы УТП: «Контроль», «Настройка», «Работа», производимых в указанной последовательности, состав проверяемой аппаратуры при автоматической проверке технического состояния в режиме «Контроль» определяется оператором, в режиме «Настройка» выполняются две задачи: «Определение и ввод формулярных поправок», «Проверка и коррекция формулярных поправок», задача «Определение и ввод формулярных поправок» включает следующие работы: определение и ввод формулярных поправок навигационной системы (НС): поправок Δβ, Δψ к измеряемым углам наклона, значения скорости собственного ухода гироскопа ωГ, румбовых поправок Δα и коэффициента КДС, определение и ввод формулярных значений поправок на установку НС ΔαГК, визира (В) ΔαВ и цены импульса датчика скорости (ДС) δS, в режиме «Работа» выполняются две задачи: задача «Определение ГД на маршруте», включающая выполнение операции по привязке УТП к исходному пункту (ИП) и маршу по маршруту с определением ГД, задача «Определение координат цели», состоящая в решении прямой геодезической задачи по определению координат цели ХЦ, YЦ, НЦ, операция по привязке УТП к ИП заключается в выполнении процедуры ввода исходных данных: плоских прямоугольных координат ИП ХИП, YИП, высоты над уровнем моря центра ИП НИП, высоты визирной цели над центром ИП hВЦ, горизонтального угла визирования на ИП (по визиру) αГ, вертикального угла визирования на ИП (по визиру) αВ, расстояния до визирной цели ИП (по визиру) D, в вычислении промежуточных значений: сближения меридианов на ИП уИП, азимута с визира на ИП АИП, предварительных значений координат точки привязки Х′ТП, Y′ТП, сближения меридианов на точку привязки Y′ТП, в вычислении окончательных значений координат точки привязки ХТП, YТП, в вычислении высоты точки привязки НТП, марш по маршруту с определением ГД заключается в подготовке к движению, которая состоит из процедуры ввода исходных данных - координат точек привязки УТП Х0, Y0, Н0, начального ориентирования - определения начального дирекционного угла (азимута) динамической оси УТП, выполняемого автономно с помощью НС или с помощью В, и автоматического измерения параметров атмосферы: давления Р0 и температуры Т0, и собственно движение по маршруту, при котором производится счисление геодезических координат, которое включает обработку исходных данных в начальной точке маршрута: плоских прямоугольных координат Х0, Y0, высоты над уровнем моря Н0, дирекционного угла динамической оси УТП α0, преобразование плоских прямоугольных координат Х0, Y0 в геодезические В0, L0 и дирекционного угла α0 в азимут А0, вычисление текущих геодезических координат Bi, Li и азимута Ai+1 в I-ом цикле измерений, преобразование текущих геодезических координат Bi, Li в плоские прямоугольные XiYi и азимута Ai+1 в дирекционный угол αi+1.
| Учебник сержанта ракетных войск и артиллерии Сухопутных войск для командиров топогеодезических отделений и топопривязчиков / Под ред | |||
| В.В.БУРОВА | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - М.: Воениздат, 1975, с.56-84 | |||
| Устройство для транспортирования рыбы из невода в лабаз | 1932 |
|
SU32262A1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ПЕРВИЧНОЙ УТИЛИЗАЦИИ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ НА МЕСТАХ ИХ ДИСЛОКАЦИИ | 2005 |
|
RU2309061C2 |
| US 6765499 B2, 20.07.2004 | |||
| US 6816761 B2, 09.11.2004 | |||
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |
| СПОСОБ ИНТЕРПОЛЯЦИИ ЗНАЧЕНИЙ ПОДПИКСЕЛОВ | 2002 |
|
RU2317654C2 |
| Станд для испытания стеклодувных формовочных приборов | 1933 |
|
SU39433A1 |

