Изобретение относится к вибрационной технике и может быть использовано в машиностроении для механических испытаний и реализации вибрационных технологий виброупрочнения деталей летательных аппаратов, а также и в других областях современной техники, работающей в условиях интенсивного динамического нагружения. В связи с этим, имеет значение создание вибрационных технологических машин, способствующих улучшению характеристик деталей на стадии их изготовления.
В частности, предлагается ряд конструктивно-технических решений.
1. Известен способ решения задач возбуждения стабильных резонансных колебаний на основе инерционного возбуждения, создающего условия для самоорганизации процессов устойчивых колебаний, происходящих в сложных системах динамического равновесия [Антипов В.И. Использование комбинационного параметрического резонанса для усовершенствования вибрационных машин // Проблемы машиностроения и надежности машин. 1998. №4, с. 16-21].
В данном способе максимальная производительность и энергоэффективность вибрационных машин достигается путем создания резонансных колебательных систем, обладающих техническим интеллектом, то есть способностью автоматической адаптации машины к постоянно действующим возмущениям при протекании технологического процесса без вмешательства из вне. Изобретение решает задачу возбуждения стабильных резонансных колебаний с обкаткой тел вращения на основе использования процессов самоорганизации, происходящих в сложных системах вдали от равновесия.
Недостатком данного изобретения является то, что для самовозбуждения обкатки тел вращения требуется сообщить несущему телу круговые колебания достаточно большой амплитуды и высокой частоты, что связано с увеличением дебалансных масс вибровозбудителя. Создаваемые при вращении дебалансов большие центробежные силы нагружают подшипники. Это снижает их ресурс и влечет большой непроизводительный расход энергии на преодоление сопротивлений вращения вала.
2. Известен способ возбуждения механических колебаний и вращательных движений системы твердых тел, схема которой приведена в работе [Блехман И.И. Что может вибрация? О «Вибрационной механике» и вибрационной технике. М: Наука, 1988, с. 134, рис. 12.2, в]. Система состоит из одного инерционного дебалансного вибровозбудителя, закрепленного на мягко виброизолированном твердом теле (несущем теле), в котором размещены два тела вращения (ролик и кольцо). Под действием вибрации ролик обкатывается по внутренней поверхности цилиндрической полости, а кольцо своей внутренней поверхностью обкатывается по внешней поверхности оси, закрепленной на несущем теле. При этом система функционирует в далеко зарезонансном режиме колебаний. Здесь реализуется эффект вибрационного поддержания вращения. Тела вращения (ролик, кольцо) совершают сложные движения: вращение вокруг собственной оси и планетарное движение вокруг центра цилиндрической полости или оси. Передаточное отношение угловой скорости обкатки к угловой скорости собственного вращения определяется выражением i=r/(r-R), где R -радиус беговой дорожки, r - радиус тела вращения. Оно отрицательно при наружной обкатке.
К основному недостатку следует отнести то обстоятельство, что при зарезонансной настройке для преодоления области интенсивных резонансных колебаний нужно иметь двигатель, мощность которого в 5-6 раз первышает мощность, необходимую для работы в зарезонансном режиме.
3. Известно устройство, в котором при обкатке тела вращения оказывают на несущее тело действие, подобное действию инерционного дебалансного вибровозбудителя. В вибротехнике тела вращения используются не как возбудители колебаний, а в качестве рабочих органов машины. Например, в конусных дробилках «Механобр-Техника» рабочий орган представляет собой конусообразное тело, которое под действием вибраций обкатывается по конусообразной полости в корпусе машины [Блехман И.И. Что может вибрация? O«Вибрационной механике» и вибрационной технике. М.: Наука, 1988, с. 128-129, рис. 11.3, а].
К недостаткам следует отнести: в зарезонансном режиме работы машины энергия вибровозбудителя расходуется не только на преодоление сил трения и поддержание обкатки, но и на преодоление сил инерции масс системы, тогда как в резонансном состоянии упругие и инерционные силы взаимно уравновешиваются.
В качестве прототипа принят способ возбуждении резонансных механических колебаний и устройство для его осуществления [Антипов В.И., Антипова Р.И., Руин А.А. «Способ возбуждении резонансных механических колебаний и устройство для его осуществления», патент РФ №2486017, В06В 1/16, приоритет 29.12.2011]. Способ заключается в том, что резонансные колебания возбуждают за счет периодического принудительного изменения инерционных параметров колебательной системы, образованной рабочим органом общей массой на упругой подвеске и параметрическим вибровозбудителем, включающим ротор с беговыми дорожками в нем и телами качения в них, осуществляют упругую подвеску рабочего органа в двух взаимно перпендикулярных направлениях по двум осям и производят настройку колебательной системы, задавая жесткость упругой подвески и частоту вращения ротора. Дополнительно вводят реактивную массу, соединенную с общей массой при помощи упругой системы, и возбуждают поступательные резонансные противофазные колебания обоих масс с реализацией синергетического эффекта системы в целом. Настройку колебательной системы производят, задавая жесткость упругой системы между обеими массами, угловые скорости ротора вибровозбудителя и обкатки, собственную частоту колебаний тел качения. Устройство содержит колебательную систему в виде соединенного с основанием упругими связями рабочего органа общей массой и установленного на нем параметрического вибровозбудителя, в котором на валу электродвигателя закреплен уравновешенный ротор с парой незамкнутых круговых беговых дорожек, расположенных симметрично относительно двух взаимно перпендикулярных его диаметров, их центры смещены от оси вращения ротора на одинаковые расстояния в сторону беговой дорожки, а в беговых дорожках размещены одинаковые уравновешенные тела качения.
Ротор выполнен из набора одинаковых дисков, в смежных дисках оси обкатки тел качения повернуты вокруг оси вращения ротора на одинаковый угол, а колебательная система выполнена с возможностью перемещения рабочего органа по двум осям. Дополнительно оно содержит реактивную массу, соединенную с рабочим органом и основанием упругими связями. Рабочий орган снабжен по меньшей мере двумя полыми цилиндрами, которые размещены на нем симметрично относительно оси вращения ротора, а в полости цилиндров свободно вложены цилиндрические ролики с возможностью обкатки внутри полостей.
Данное изобретение имеет следующие недостатки:
- сложность конструкции (а именно двухуровневая система упругих подвесок и рабочего органа), вследствие чего необходимо затрачивать значительное количество времени и материала на ее изготовление;
- вибрация передается не только на рабочий орган, но и на вибровозбудитель, что приводит к его более быстрому износу и сокращению срок эксплуатации.
Цель предлагаемого изобретения заключается в том, чтобы упростить способ возбуждения резонансных колебаний, при этом уменьшить неблагоприятные воздействия на элементы вибрационного стенда.
Способ возбуждения колебаний, заключающийся в том, что устанавливают жесткость упругих элементов колебательной системы в зависимости от заданной частоты и амплитуды колебаний рабочего стола, возбуждают колебания системы вибровозбудителя и передают колебания на рабочий стол, отличающийся тем, что жесткость колебательной системы регулируют с помощью компенсатора, установленного на жестком элементе натяжного устройства, путем изменения длины жесткого элемента, соединяющего рабочий стол с вибровозбудителем, а резонансные колебания возбуждают при помощи вибровозбудителя, работающего в режиме, определяемом по формуле:

где р=jω (j - комплексная переменная, ω - частота внешнего возмущения), ω -угловая скорость вращения дисбаланса, параметры а, b и с обозначаются  М - суммарная масса обеих парциальных систем; m0 - масса дебалансов, которые устанавливают на вибровозбудителе;
М - суммарная масса обеих парциальных систем; m0 - масса дебалансов, которые устанавливают на вибровозбудителе;
 эксцентриситет вибровозбудителя (R - радиус эксцентрика).
эксцентриситет вибровозбудителя (R - радиус эксцентрика).
Устройство для возбуждения колебаний, состоящее из рабочего стола, вибровозбудителя и упругих элементов, отличающееся тем, что рабочий стол и вибровозбудитель соединены компенсатором и жестким элементом с возможностью изменения длины, а также соединены упругими элементами с основанием и гибкими элементами с вертикальными стенками, причем гибкий элемент, соединяющий вибровозбудитель с вертикальной стенкой, имеет натяжное устройство.
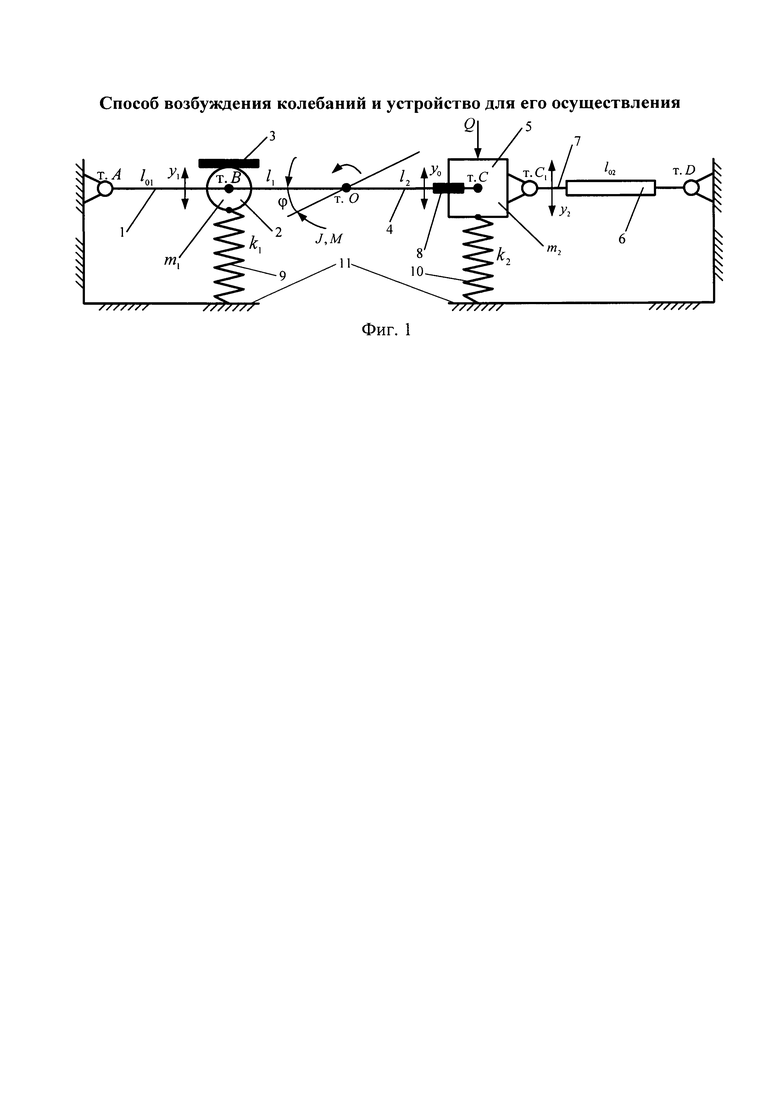
На фиг. 1 показана схема для настройки режимов работы вибростенда.
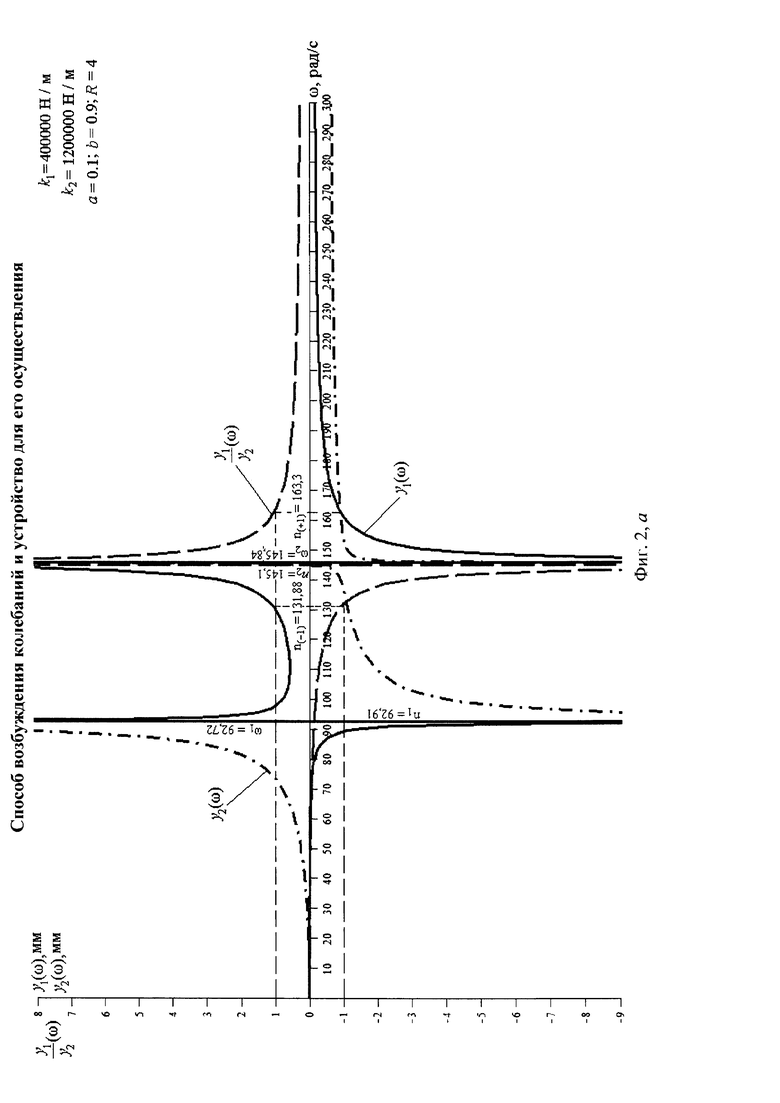
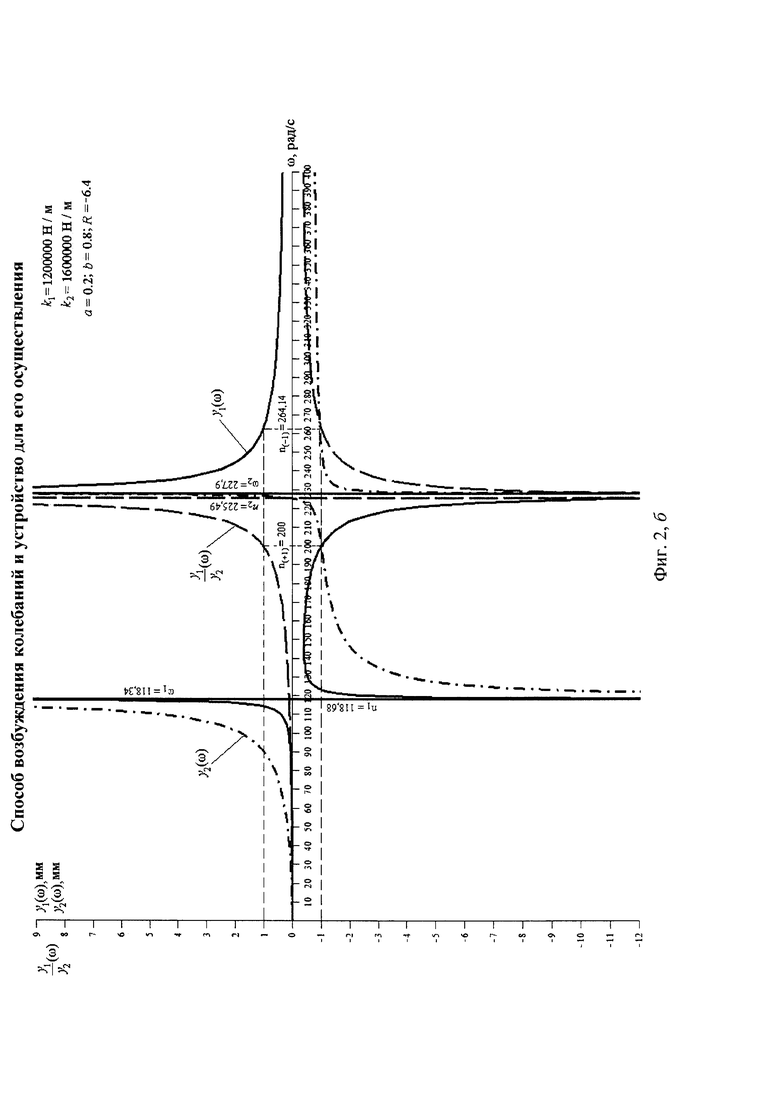
На фиг. 2 показаны зависимости амплитуд колебаний и отношение амплитуд колебаний рабочих частей вибростенда от частоты внешнего воздействия и изменения инерционных параметров системы.
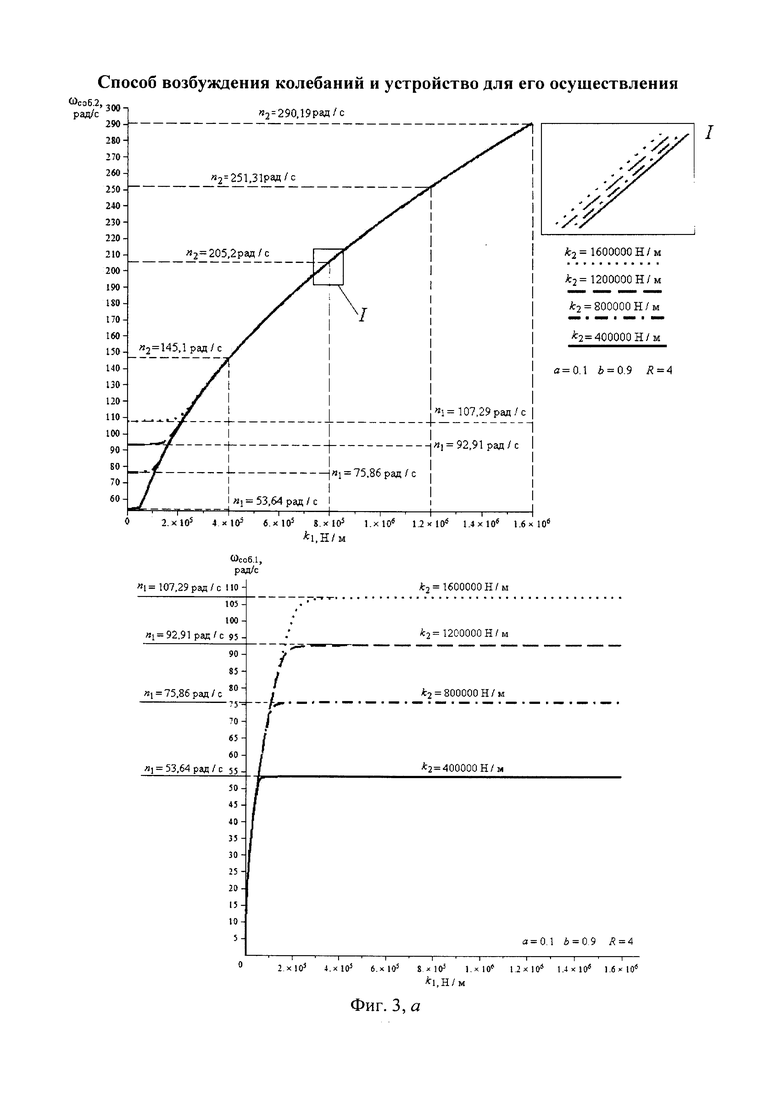
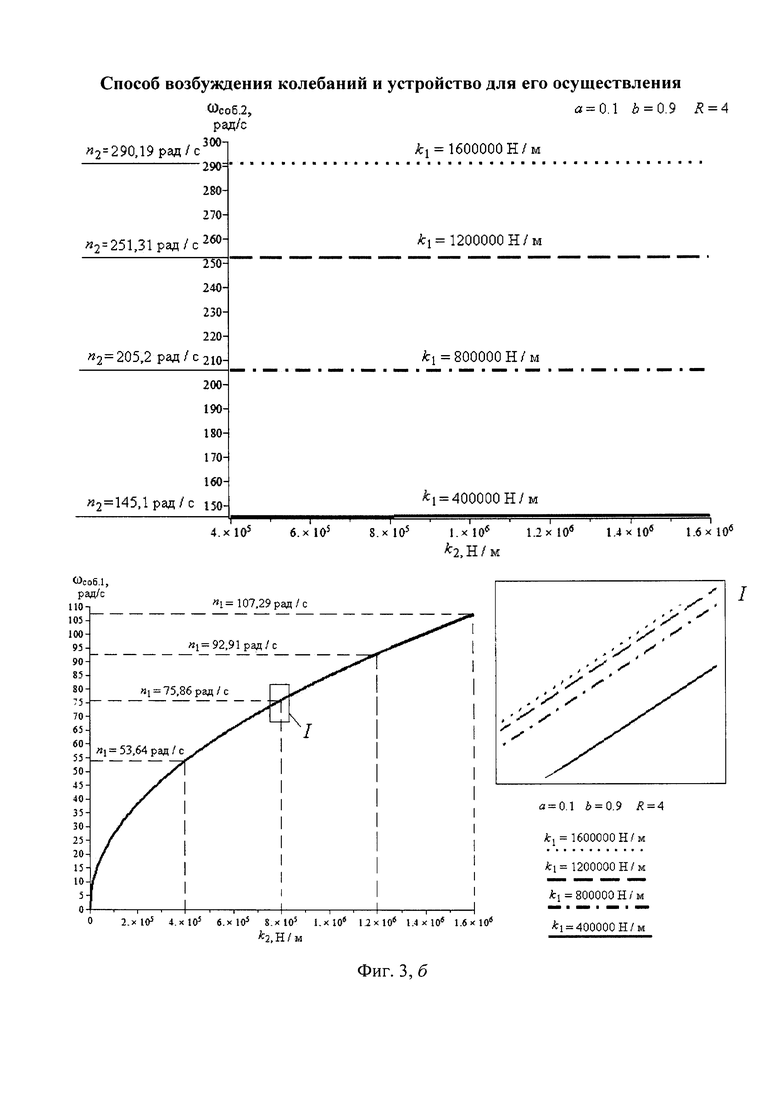
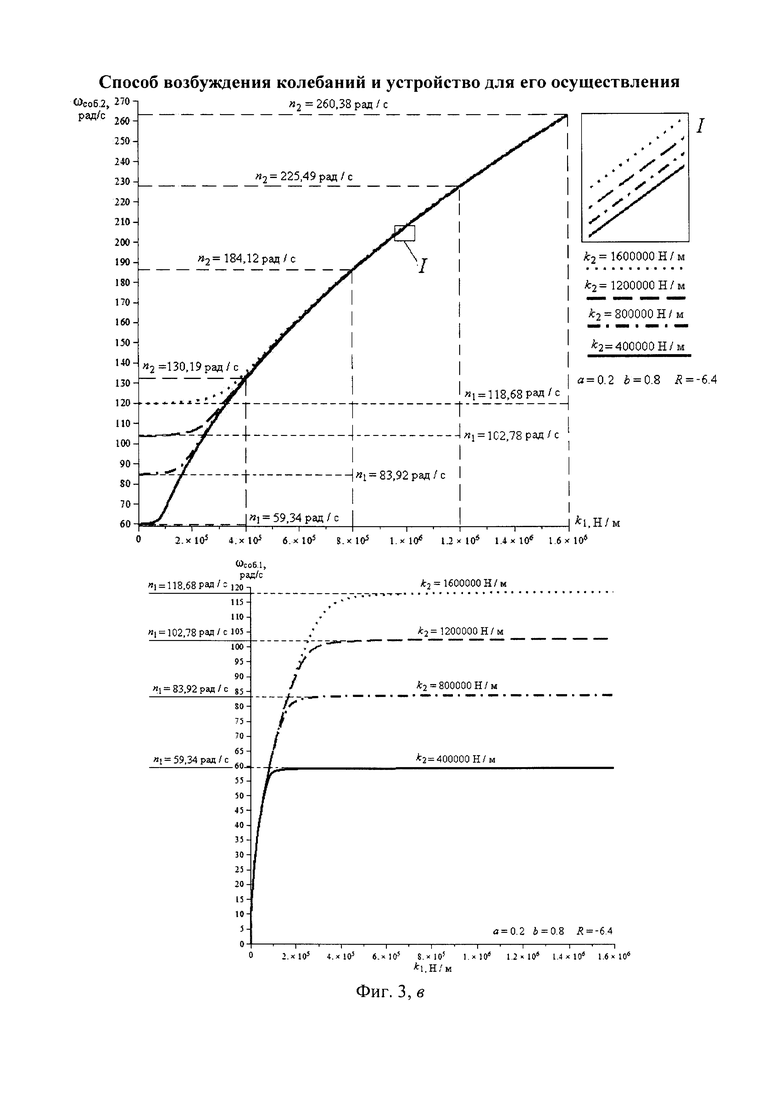
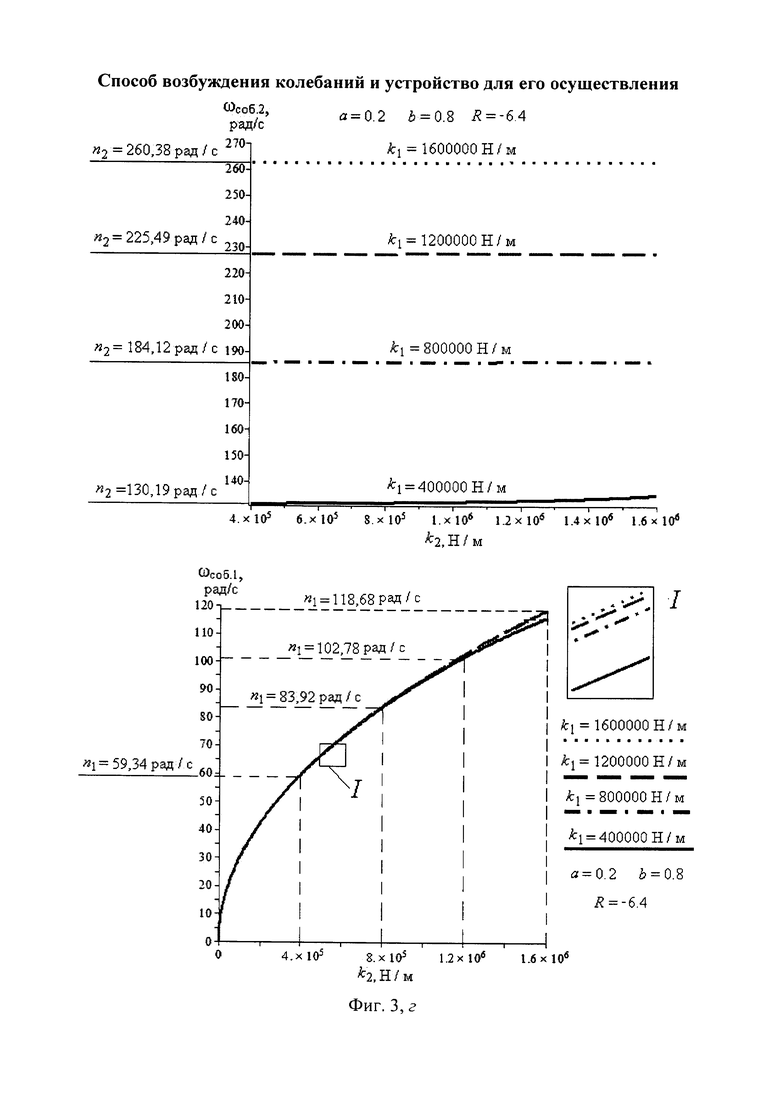
На фиг. 3 показаны зависимости частот собственных колебаний парциальных систем от жесткостей упругих опор и инерционных параметров системы.
На фиг. 1 показаны: гибкий элемент 1; опорный диск 2 и площадка 3, объединенные в рабочий стол для установки контейнера, в котором происходит вибрационная обработка деталей, объединенные в рабочий стол; жесткий элемент 4; вибровозбудитель 5; натяжное устройство 6; гибкий элемент 7; компенсатор продольных колебаний 8; упругие элементы 9, 10; основание 11.
Приняты следующие обозначения: т. А - точка шарнирного крепления гибкого элемента 1 с основанием 11; l01 - длина гибкого элемента 1; у1 - амплитуда колебаний рабочего стола; т. В - точка крепления рабочего стола к упругому элементу 9; m1 - масса рабочего стола; k1 - жесткость упругого элемента 9; k2 - жесткость упругого элемента 10; т. О - центр тяжести жесткого элемента; l1 - расстояние от центра тяжести жесткого элемента 4 до т. В опорного диска 2; ϕ - угол поворота рабочего органа 4; J, М - момент инерции и масса жесткого элемента 4; т. С - точка крепления жесткого элемента 4 к вибровозбудителю 5; l2 - расстояние от центра тяжести жесткого элемента 4 до точки крепления с вибровозбудителем 5; Q - силовое гармоническое воздействие вибровозбудителя 5; m2 - масса вибровозбудителя 5; k2 - жесткость упругого элемента 10; т. С1 - точка крепления гибкого элемента 7 к вибровозбудителю 5; y2 - амплитуда колебаний вибровозбудителя 5; l02 - длина гибкого элемента 7; т. D-точка шарнирного крепления гибкого элемента 7 к основанию 11.
Способ осуществляется следующим образом. Выделяют две парциальные системы: первая состоит из диска и рабочей площадки, объединенных в рабочий стол, а вторая - инерционный возбудитель, которые соединяют с помощью жесткого элемента. При возникновении гармонической силы Q на вибровозбудителе создаются вертикальные колебания жесткого элемента, а также рабочего стола, амплитуда которого определяется соотношением:
 ,
,
где у - колебания вибровозбудителя; m0 - масса дебалансов, которые устанавливают на вибровозбудителе;  эксцентриситет вибровозбудителя (R - радиус эксцентрика); k1, k2 - жесткости упругих элементов; ω - частота внешнего возмущения; М- суммарная масса парциальных систем; J- момент инерции;
эксцентриситет вибровозбудителя (R - радиус эксцентрика); k1, k2 - жесткости упругих элементов; ω - частота внешнего возмущения; М- суммарная масса парциальных систем; J- момент инерции;  , l1 - расстояние от центра тяжести жесткого элемента до рабочего стола; l2 - расстояние от центра тяжести жесткого элемента до точки крепления с вибровозбудителем; р=jω,
, l1 - расстояние от центра тяжести жесткого элемента до рабочего стола; l2 - расстояние от центра тяжести жесткого элемента до точки крепления с вибровозбудителем; р=jω,  - комплексная переменная.
- комплексная переменная.
В то же время, на вибровозбудителе возникают колебания с амплитудой у2, определяемой

Выполнив преобразование р=jω, получают следующие выражения амплитуд y1 и у2:

Производят настройку колебательной системы, задавая жесткости упругих опор k1 и k2, регулируя силу натяжения гибкого элемента, изменяя положение центра тяжести жесткого элемента, а также парциальные частоты систем, определяемые как:

При создании явлений, близких к резонансных в парциальных системах, жесткости упругих опор k1 и k2, а также положение центра тяжести жесткого элемента задают таким образом, чтобы внутри интервала частот собственных колебаний:

располагались парциальные частоты.
В данном вибрационном стенде также находят проявление рычажные связи. Суть явлений заключается в том, что жесткости упругих опор k1 и k2, а также положение центра тяжести рабочего органа задают таким образом, что при частоте  соотношение амплитуд колебаний
соотношение амплитуд колебаний  , что свидетельствует о работе рабочего органа как рычага второго рода, а при частоте
, что свидетельствует о работе рабочего органа как рычага второго рода, а при частоте  - как рычага первого рода.
- как рычага первого рода.
Вибрационное устройство работает следующим образом.
При воздействии гармонической силы Q, возникающей на вибровозбудителе 5, установленном на упругой опоре 10, закрепленной на основании 11, создаются вертикальные колебания, передающиеся через жесткий элемент 4 на площадку для вибрационной обработки 3 и диска 2, объединенных в рабочий стол, расположенных на упругой опоре 9, закрепленной на основании 11; для устранения продольных колебаний используются гибкий элемент 1, закрепленный неподвижным шарниром в точке А, компенсатор 8, а также ограничитель в виде гибкого элемента 7; сила натяжения гибкого элемента 7 и значение статической нагрузки на жесткий элемент 4 осуществляются с помощью регулировочного устройства 6. В этом случае в процессе работы вибрационного стенда на опорном диске 2 и площадке для вибрационной обработки 3, объединенных в рабочий стол, возникают явления, близкие к резонансу, а на вибровозбудителе 5 амплитуда колебаний у2 стремится к нулю.
Предлагаемый способ возбуждения колебаний в вибростенде с рычажными связями, по сравнению с известными способами, позволяет передавать энергию вибрации практически полностью на рабочий орган, а не распределять ее и на вибровозбудитель, что позволяет обеспечивать в нем динамическое гашение колебаний и его надежную работу.
По результатам математического моделирования были рассчитаны амплитуды колебаний у1 и у2, отношение амплитуд колебаний в зависимости от частоты внешнего воздействия, представленные на графиках фиг. 2, а также зависимость собственных частот парциальных систем от жесткостей упругих опор, приведенных на фиг. 3. На графиках фиг.2 было рассмотрено два случая. В первом - соотношение R=Jc2 - Mab=4 кг⋅м2, а=0,1 м, b=0.9 м, с=0,25 м, М=150 кг, m0=3.5 кг; r=23,343 см; k1=4⋅105 Н/м; k2=12⋅105 Н/м. Во втором - R=Jc2-Mab=-6,4 кг⋅м2, а=0,2 м, b=0.8 м, с=0,25 м М=150 кг, m0=3.5 кг; r=23,343 см; k1=12⋅105 Н/м; k2=16⋅105 Н/м, что соответствует параметрам реальных конструктивных решений, реализованных при виброупрочнении лопастей вертолета. Было установлено следующее:
1) парциальные частоты систем близки к собственным частотам, но не выходят за их пределы;
2) на парциальной частоте n2 наблюдается значение амплитуды колебаний у2=0, т.е. обеспечивается режим динамического гашения на вибровозбудителе;
3) в зависимости от соотношения параметров а, b и J изменяются положения частот, при которых рабочий орган выполняет функции рычагов первого и второго родов: при R>0 рабочий орган ведет себя как рычаг первого рода в зарезонансной области, а как рычаг второго рода - в межрезонансной области; при R<0 рабочий орган ведет себя как рычаг первого рода в межрезонансной области, а как рычаг второго рода - в зажрезонансной области;
На фиг. 3 также были рассмотрены зависимости собственных частот парциальных систем от жесткостей и инерционных параметров рабочего органа для двух случаев. На основании математических расчетов можно сделать следующие выводы:
1) при увеличении жесткостей упругих опор k1 и k2 собственные и парциальные частоты увеличиваются согласно квадратичной зависимости;
2) при настройке вибрационного стенда от жесткости k1 зависят значения верхних границ парциальных и собственных частот рабочих частей, а от жесткости k2 - нижние границы парциальных и собственных частот;
3) при изменении инерционного параметра R в меньшую сторону уменьшаются и значения собственных и парциальных частот;
4) асимптотическое приближение кривых на некоторых графиках объясняется близостью собственных и парциальных частот;
5) прямолинейность зависимости ωсоб.2 (k2) для каждого из случаев R объясняется полученными значениями собственных частот и расположением кривых на одном графике.
Список использованной литературы
1. Антипов В.И. Использование комбинационного параметрического резонанса для усовершенствования вибрационных машин // Проблемы машиностроения и надежности машин. 1998. №4, с. 16-21
2. Блехман И.И. Что может вибрация? О «Вибрационной механике» и вибрационной технике. М.: Наука, 1988, - 208 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486017C1 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
Изобретение относится к вибрационной технике. Способ возбуждения колебаний заключается в том, что возбуждают резонансные колебания, задают жесткость упругих подвесок колебательной системы, образованной рабочим органом и вибровозбудителем. На вибровозбудителе создают гармоническую силу, вследствие чего возникают вертикальные колебания. Колебания передают на рабочую систему, образованную рабочим органом, диском и площадкой для вибрационной обработки деталей. На концах устанавливают два стержня и компенсатор у вибровозбудителя, которыми устраняют продольные колебания рабочей системы. Амплитуду колебаний рабочей системы регулируют с помощью натяжного устройства и меняют значения жесткости пружин и положение центра тяжести и момента инерции рабочей системы таким образом, что на вибровозбудителе получают колебания, близкие к нулю, необходимую амплитуду колебаний, совершая вертикальные движения. Технический результат – уменьшение неблагоприятных воздействий на элементы вибрационного стола. 2 н.п. ф-лы, 7 ил. 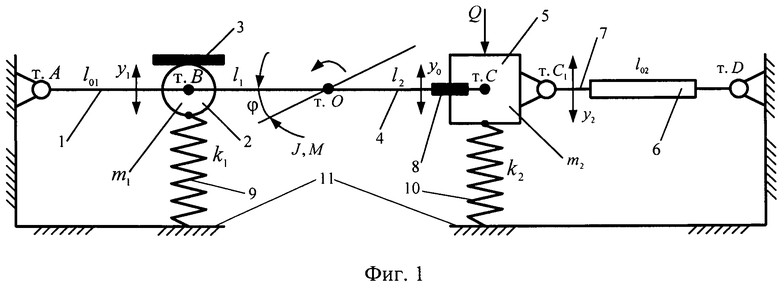
1. Способ возбуждения колебаний, заключающийся в том, что устанавливают жесткость упругих элементов колебательной системы в зависимости от заданной частоты и амплитуды колебаний рабочего стола, возбуждают колебания системы вибровозбудителя и передают колебания на рабочий стол, отличающийся тем, что жесткость колебательной системы регулируют с помощью компенсатора, установленного на жестком элементе натяжного устройства, путем изменения длины жесткого элемента, соединяющего рабочий стол с вибровозбудителем, а резонансные колебания возбуждают при помощи вибровозбудителя, работающего в режиме, определяемом по формуле:

где у - колебания вибровозбудителя; m0 - масса дебалансов, которые устанавливают на вибровозбудителе;  эксцентриситет вибровозбудителя (R - радиус эксцентрика); k1, k2 - жесткости упругих элементов; ω - частота внешнего возмущения; М - суммарная масса парциальных систем; J - момент инерции;
эксцентриситет вибровозбудителя (R - радиус эксцентрика); k1, k2 - жесткости упругих элементов; ω - частота внешнего возмущения; М - суммарная масса парциальных систем; J - момент инерции;
 , l1 - расстояние от центра тяжести жесткого элемента до рабочего стола; l2 - расстояние от центра тяжести жесткого элемента до точки крепления с вибровозбудителем; р=jω,
, l1 - расстояние от центра тяжести жесткого элемента до рабочего стола; l2 - расстояние от центра тяжести жесткого элемента до точки крепления с вибровозбудителем; р=jω,  - комплексная переменная.
- комплексная переменная.
2. Устройство для возбуждения колебаний, состоящее из рабочего стола, вибровозбудителя и упругих элементов, отличающееся тем, что рабочий стол и вибровозбудитель соединены компенсатором и жестким элементом с возможностью изменения длины, а также соединены упругими элементами с основанием и гибкими элементами с вертикальными стенками, причем гибкий элемент, соединяющий вибровозбудитель с вертикальной стенкой, имеет натяжное устройство.
| Способ извлечения ванадия в виде его хлорокиси в процессе очистки четыреххлористого титана | 1960 |
|
SU133232A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486017C1 |
| CN 102661839 A, 12.09.2012 | |||
| А.П | |||
| Хоменко и др | |||
| ВИРТУАЛЬНЫЙ РЫЧАЖНЫЙ МЕХАНИЗМ: ДИНАМИЧЕСКОЕ ГАШЕНИЕ КОЛЕБАНИЙ КАК ФОРМА ПРОЯВЛЕНИЯ РЫЧАЖНЫХ СВЯЗЕЙ // Известия Транссиба, N 4(20), 2014 (стр | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| US 4602555 A, 29.07.1986 | |||
| JP S5946533 A, 15.03.1984. | |||

