(54) ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2065092C1 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2074329C1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2079732C1 |
| Позиционный пневмогидравлический привод | 1988 |
|
SU1521935A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ И ВЫПОЛНЕННАЯ С ПОДОБНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ КЛАПАННАЯ СИСТЕМА | 2009 |
|
RU2548137C1 |
| Регулируемый магнитореологический пневматический амортизатор | 2021 |
|
RU2764210C1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1562542A1 |
| Позиционный привод | 1983 |
|
SU1160135A1 |
1
Изобретение относится к пневмогидравлическим приводам которые, в частности, находят широкое применение в промышленных роботах, станках и манипуляторах.
Известен позиционный пневмогидравлический привод, содержащий исполнительный пневмоцилиндр, шток .которого жестко связан со штоком гидроцилиндра, управляющие полости которого заполнены магнитореологичёской жидкостью и связаны между собой через регулируемый дроссель с дросселирующим каналом и органом управления с переключателем 1 .
Недостатком известного привода Является сложность конструкции тормозного устройства, включающего гидроцилиндр и регулиру;емый дроссель.
Целью изобретения является упрощение конструкции привода.
Поставленная цель достигается тем, что в позиционном пневмогидравлическом приводе, содержащем исполнительный пневмоцилиндр, шток которого жестко связан со штоком гидроцилиндра, управляющие полости которого заполнены магнитореологичёской жидкостью и связаны между собой через регулируемый дроссель с дросселирующим каналом и органом .управления с переключателем, орган управления дросселя выполнен в виде трех последовательно расположенных электромагнитных катущек, охватывающих дросселирующий канал, причем центральная электромагнитная катушка связана через переключатель с источником постоянного тока, а две крайние катушки - через переключатель с источником переменного и постоянного тока.
10
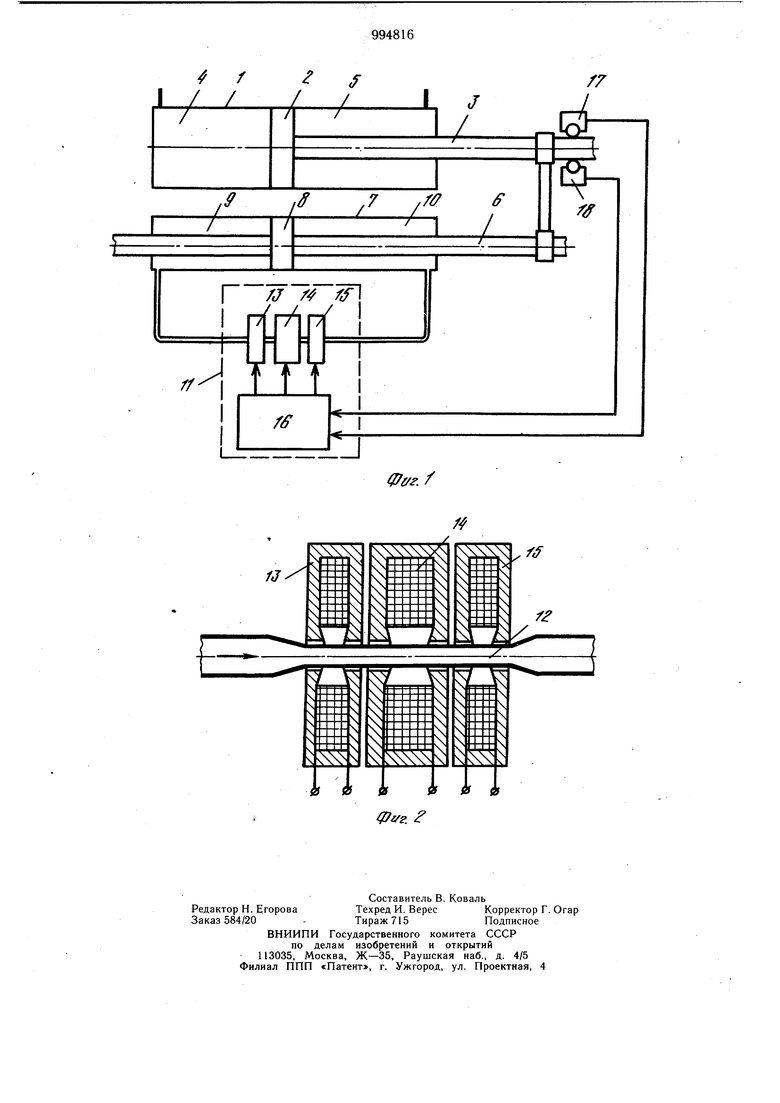
На фиг. I представлена принципиальная .схема привода; на фиг. 2 - полуконструктивная схема регулируемого дросселя.
Позиционный пневмогидравлический привод (фиг. 1) содержит исполнительный пнев15 моцилиндр 1 с установленным в нем поршнем 2 со щтоком 3 с образованием рабочих полостей 4 и 5. Шток 3 связан со штоком 6 гидроцилиндра 7, в котором уста-новлен поршень 8 с образованием управляющих полостей 9 и 10, связанных между собой
20 через регулируемый дроссель 11 с дросселирующим каналом 12 (фиг. 2), органом управления, выполненным в виде трех последовательно расположенных электромагнитных катушек 13, 14 и 15, охватывающих
дросселирующий канал 12, и переключателем 16.
Со штоком 3 пневмоцилиндра 1 взаимодействуют датчики обратной связи по положению и скорости - соответственно 17 и 18, подключенные к переключателю 16.
Электромагнитная катушка 14 через переключатель 16 сообщается с источником постоянного тока, а электромагнитные катушки 13 и 15 через переключатель 16 - с источником переменного и постоянного тока (Ни чертеже не показаны). Управляющие полости 9 и 10 заполнены магнитореологической жидкостью.
Позиционный пневмогидравлический привод работает следующим образом.
При подаче воздуха в одну из рабочих полостей, например 4, исполнительного пневмоцилиндра 1 развивается движущее усилие, обеспечивающее перемещение штока 3 и связанного с ним щтока 6 гидроцилиндра 7 (вправо по чертежу). При этом магнитореологическая жидкость из управляющей полости 10 перетекает в управляющую полость 5, развивая на поршне 8 гидроцилиндра 7 усилие сопротивления движению щтока 3, определяемое, в основном, проводимостью регулируемого дросселя И. В соответствии с программой и сигналами с датчиков 17 и 18 обратной связи по положению и скорости, электромагнитная катущка 14 через переключатель 16 запитывается от источника постоянного тока, тем самым намагничивая магнитореологическую жидкость, и изменяя сопротивление дросселя 11. Таким образом, можно управлять скоростью перемещения штока 3 исполнительного пневмоцилиндра 1 и в широких пределах - от максимального до полного останова.
Магнитореологическая жидкость, пригодная для работы в гидравлических тормозных приводах, т. е. способная создать значительные тормозные усилия, имеет сравнительно высокую вязкость, даже при отсутствии магнитного поля. Это объясняется наличием структуры в кидкости из-за присутствия магнитотвердой постоянно намагниченной составляющей, добавляемой в жидкость для ее седиментационной устойчивости (для предотвращения ее расслоения) . Поэтому для снижения вязкости жидкости, протекающей через дроссель 11 в неуправляемом режиме (т. е. при обесточенной электромагнитной катушке 14) производится размагничивание жидкости с помощью электромагнитной катушки 15 путем сообщения ее с источником переменного тока через переключатель 16 и восстановления ее намагниченности на выходе из
дросселя 11 с помощью электромагнитной катушки 13, связанной с источником постоя нного тока через переключатель 16.
При реверсе привода воздух подается в рабочую полость 5 исполнительного пневмо.. цилиндра 1. При этом магнитореологическая жидкость из управляющей полости 9 через регулируемый дроссель 11 поступает в управляющую полость 10. Проводимость дросселя. 11 определяется величиной намагничиваемости жидкости.
В неуправляемом режиме электромагнитная катушка 13 связана с источником переменного тока, а электромагнитная катушка 14 - с источником постоянного тока. Конструктивная простота регулируемого дросселя, обусловленная отсутствием подвижных частей, повышает надежность, устойчивость регулирования и не требует тщательного изготовления и настройки, по сравнению с известным приводом.
Формула изобретения
Позиционный пневмогидравлический при.вод, содержащий исполнительный пневмоцилиндр, шток которого жестко связан со штоком гидроцилиндра, управляющие полости которого заполнены магнитореологической жидкостью и связаны между собой через регулируемый дроссель с дросселирующим каналом и органом управления с переключателем, отличающийся тем, что, с целью упрощения конструкции привода, орган управления дросселя выполнен в виде трех последовательно расположенных электромагнитных катушек, охватывающих дросселирующий канал, причем центральная
электромагнитная катушка связана через переключатель с источником постоянного тока, а две крайние катушки - через переключатель с источником переменного и постоянного тока.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 750144, кл. F 15 В 9/03, 1978.
//
I / ///I/
/7
фуг./
