Изобретение относится к радиолокации и может использоваться в системах судовой навигации.
Из уровня техники известна радиолокационная станция системы судовой навигации, выполненная в виде антенного поста. Антенный пост содержит волноводно-щелевую антенную систему, соединенную с вращающимся переходом (RU 2126570 C1, 20.02.1999). Недостатки известного устройства состоят в том, что принятые сигналы по длинным трактам поступают на прибор обработки, находящийся на расстоянии до 100 м.
Технический результат состоит в уменьшении потерь в тракте приемопередатчика.
Указанный результат достигается тем, что в способе формирования сложных фазоманипулированных сигналов для корабельной радиолокационной станции, заключающемся в том, что для определения дальности объекта по отраженному сигналу в качестве зондирующего сигнала используют непериодический сложный сигнал, длина временного отрезка которого является сегментом сигнала, при этом сегменты сигнала в течение времени накопления не повторяются, в каждый сегмент сигнала введен строб импульсного сигнала, расположение которого посередине сегмента сигнала, и временной отрезок строба импульсного сигнала равен максимальной задержке отраженного сигнала от дальнего объекта, на которую рассчитана шкала радиолокационной станции. При этом непериодический сложный сигнал представлен в виде сосредоточенных во времени пачек, интервал следования которых равен максимальной задержке до цели, и располагаются сосредоточенные во времени пачки таким образом, чтобы отраженные сигналы от ближних и дальних целей не пересекались во времени. Отраженный сигнал принимается, производится его оцифровка, выделяется импульсный сигнал и режектируются импульсные помехи, на сегменте сигнала осуществляется свертка сигнала по пачкам путем корреляции принятого сигнала и непериодического сложного сигнала, осуществляется накопление в рециркуляторе пачек сегмента, формируется суммарный отклик импульсного строба и сложного сигнала, по которому рассчитывается скорость корабля с учетом среднего доплеровского смещения, определяется дальность до объекта путем компенсации собственной скорости корабля. В корабельной радиолокационной станции с использованием сложных фазоманипулированных сигналов, содержащей антенный пост, включающий в себя волноводно-щелевую антенную систему, соединенную с вращающимся переходом, соединенным через ферритовый циркулятор с приемопередатчиком, выполненным в виде модуля формирователя зондирующего сигнала (МФЗС) и приемника отраженного сигнала, а также устройство формирования и обработки сигналов (УФОС), входы и выходы которого соединены с приемопередатчиком и пульт управления, УФОС включен в состав антенного поста и расположен от радиопередатчика не более чем на 1 м. При этом УФОС выполнен на программируемой логической интегральной схеме (ПЛИС), формирующей сигнал на видеочастоте и передающей его на формирователь зондирующего сигнала в виде сложных фазоманипулированных сигналов и стробимпульсов и на приемник отраженных сигналов для приема отраженных сигналов и режекции импульсных помех, формирующей сигналы коммутации приемопередатчика для осуществления работы РЛС в двух режимах и подающей их на управляющие входы приемопередатчика в виде стробимпульсов, формирующей команды для управления приводом вращения антенного поста по принимаемым сигналам контроля и подачи команд управления во вращающуюся систему по цифровым линиям транзисторно-транзисторной логики (TTL), формирующей команды управления мощностью и чувствительностью приемника отраженных сигналов. ПЛИС соединена с процессором, предназначенным для обработки и вычисления навигационных данных по принимаемым ПЛИС сигналам от приемника отраженного сигнала в виде кодов амплитуды и фазы; и сигналам датчиков угла и передачи обработанных цифровых данных по сети Ethernet в радиопередатчик радиолокационной станции (РП РЛС).
Кроме того, процессор предназначен для обработки и вычисления навигационных данных и выполнен с возможностью последовательного осуществления действий: прием отраженного сигнала, его оцифровка, выделение импульсного сигнала и режекция импульсных помех. На сегменте сигнала осуществляют свертку сигнала по пачкам путем корреляции принятого сигнала и непериодического сложного сигнала и осуществляют накопление в рециркуляторе пачек сегмента, формируют суммарный отклик импульсного строба и сложного сигнала, по которому рассчитывают скорость корабля с учетом среднего доплеровского смещения, определяют дальность до объекта путем компенсации собственной скорости корабля.
Устройство формирования сложных сигналов содержит программируемую логическую интегральную схему (ПЛИС), выполненную с возможностью:
- формировать сигнал на видеочастоте для зондирования в виде импульсов фазовой модуляции и формирования из принятых отраженных сигналов сигнала на нулевой частоте с режекцией импульсных помех для передачи их в приемник отраженных сигналов;
- формирования сигналов коммутации для приемопередатчика и подачи их на управляющие входы приемопередатчика в виде стробимпульсов;
- формирования командных сигналов по принимаемым сигналам для управления приводом вращения антенного поста и подачи команд управления во вращающуюся систему по цифровым линиям транзисторно-транзисторной логики (TTL), с возможностью формирования сигналов команд управления мощностью и чувствительностью приемника отраженных сигналов.
На Фиг.1 показана структурно-функциональная схема СН РЛС.
На Фиг.2 отображена функциональная схема устройства обработки и формирования сигналов.
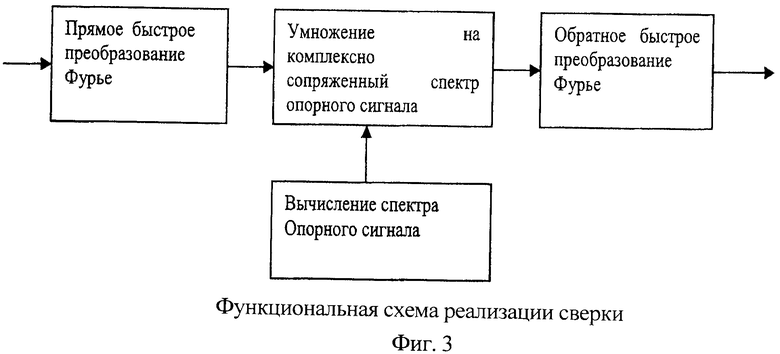
На Фиг.3 показана функциональная схема реализации сверки.
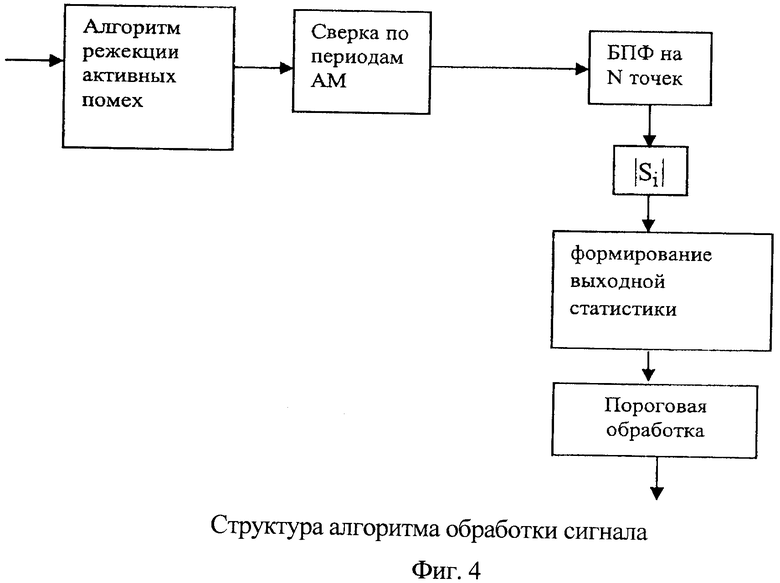
На Фиг.4 показана структура алгоритма обработки сигнала.
Радиолокационная станция системы судовой навигации содержит антенный пост 1, включающий в себя волноводно-щелевую антенную систему 2, соединенную с вращающимся переходом 3, соединенным через ферритовый циркулятор 4 с приемопередатчиком, выполненным в виде формирователя 5 зондирующего сигнала и приемника 6 отраженного сигнала, а также устройство 7 формирования и обработки сигналов (УФОС), входы и выходы которого соединены с приемопередатчиком и пульт управления 8, при этом УФОС включен в состав антенного поста 1 и расположен от пульта управления 8 не более чем на 1 м. УФОС выполнен на программируемой логической интегральной схеме (ПЛИС).
УФОС содержит блок формирования зондирующего сигнала, блок оцифровки принимаемого сигнала, блок управления приемопередатчиком, блок цифровой обработки сигнала (Фиг.2) и предназначен для работы совместно с приемопередатчиком, в котором обеспечивается формирование сигнала на несущей частоте и прием сигнала с использованием прямого преобразования на нулевую частоту. Связь с РП РЛС осуществляется по Ethernet интерфейсу со скоростью не менее 100 МБ/с.
Входным сигналом для формирователя сигнала приемопередатчика являются коды, амплитуды и фазы. При этом предусмотрено управление двумя ключами прием-передача в приемном тракте и двумя ключами в передающем тракте.
В приемопередатчике могут использоваться цифровые аттенюаторы. Для установки выходной мощности выделено шесть линий управления цифровым аттенюатором передающего тракта.
Для реализации временной автоматической регулировки усиления (ВАРУ) и установки усиления в приемном тракте выделено шесть линий управления цифровым аттенюатором приемного тракта.
Для управления мотором антенного поста (включить, выключить, вращение) выделены специальные цифровые линии TTL уровня, всего четыре линии.
Для осуществления контроля источников питания, тока выходного каскада, температуры внутри антенного поста и т.п. установлено медленное многоканальное аналого-цифровое преобразование и выделено четыре цифровых входа.
Вычислитель выполнен на процессоре цифровой обработки сигнала с целочисленной арифметикой и ПЛИС обработки и формирования сигнала. Коммутация прием-передача осуществляется с помощью сигналов LVD (низковольтных дифференциальных). Остальные сигналы имеют низкий TTL уровень.
При обработке сигнала выполняется следующая последовательность действий:
- оцифровка сигнала и выделение комплексной огибающей сигнала;
- реализация алгоритма бланкирования асинхронных помех;
- свертка сигнала на одном периоде амплитудной модуляции;
- доплеровская фильтрация (БПФ, согласованное с длительностью сигнала);
- формирование выходной статистики;
- пороговая обработка.
Рассмотрим этапы этого алгоритма более подробно (см. Фиг.4):
1. Оцифровка квадратурных составляющих комплексной огибающей сигнала: частоту дискретизации следует в каждом канале сделать максимально возможную и кратную частоте формирования выходного потока данных. Поле оцифровки следует организовать как цифровой фильтр, с последующей децимацией отсчетов.
2. Помехи от импульсных станций, асинхронные помехи протяженностью, сравнимой с периодом сигнала, подавляются алгоритмом бланкирования асинхронных помех. Алгоритм бланкирования помехового сигнала основывается на том, что мощность излучаемого сигнала и, соответственно, закон изменения амплитуды от дальности отраженного сигнала не очень сильно изменяются от периода к периоду. Изменение амплитуды обусловлено только флюктуациями самого отраженного сигнала и вращением диаграммы направленности антенны. Если импульсная помеха, не синхронная по сравнению с зондирующим сигналом, то можно сравнить амплитуду сигнала на соседних периодах. Если амплитуда сигнала резко изменилась, то можно предположить, что это помеховый сигнал, и его необходимо бланкировать (обнулить). Преимуществом этого алгоритма является то, что его эффективность сохраняется, если протяженность помехи сравнима или даже превышает длительность пачки сигнала. В этом случае зона бланкирования может быть расширена вплоть до периода сигнала, но, учитывая большую длительность сигнала, потеря нескольких периодов не очень существенна ни с точки зрения его энергии, ни с точки зрения его корреляционных свойств.
3. Свертка сигнала на одном периоде амплитудной модуляции: алгоритм свертки вычислительно удобнее реализовать в частотной области. Функциональная схема реализации сверки изображена на Фиг.3.
4. Доплеровская фильтрация: для отсчетов свертки принятого и опорного сигнала с одинаковой задержкой τ вычисляется дискретное преобразование Фурье (ДПФ) с предварительным взвешиванием по амплитуде, согласно окну - квадрату диаграммы направленности антенны:
 ,
,
где Ok[n] - функция окна, определяется табличными данными квадрата диаграммы направленности антенны.
Для вычисления ДПФ используется алгоритм быстрого преобразования Фурье (БПФ) Кули-Тьюки по основанию 2.
5. Формирование выходной статистики: в результате обработки была получена матрица дальность - скорость большой размерности. Для того чтобы отобразить эти данные, надо объединить результат по всем доплеровским каналам. Для этого обычно выбирают максимальный отклик по всем доплеровским каналам одной дальности за исключением каналов, которые соответствуют отражениям от подстилающей поверхности.
Применение сложного сигнала позволяет построить РЛС с малой пиковой мощностью излучения по сравнению с импульсной станцией того же энергопотенциала. И, как следствие, это приводит к технологическим преимуществам, а именно, появляется возможность использовать полупроводниковые усилители мощности с высоким КПД, большим сроком службы и низкими напряжениями питания. Сравнительно просто получить когерентный прием и обработку сигнала большой длительности, так как нет необходимости в качестве формирователей сигнала большой мощности использовать автогенераторные приборы (например, магнетроны).
Независимость разрешающей способности станции со сжатием импульса от длительности импульса позволяет иметь одно и то же разрешение по дальности на любых шкалах дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| Устройство согласованной фильтрации произвольных отраженных ЛЧМ сигналов в реальном масштабе времени | 2018 |
|
RU2699828C1 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2608637C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ДЛЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ И ИЗМЕРЕНИЯ ИХ ПАРАМЕТРОВ ДВИЖЕНИЯ В ЗОНЕ СЕЛЕКЦИИ И РАДИОЛОКАЦИОННЫЙ ДАТЧИК ЕГО РЕАЛИЗУЮЩИЙ | 2021 |
|
RU2783402C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |

Изобретение относится к радиолокации и может использоваться в системах судовой навигации. Достигаемый технический результат состоит в уменьшении потерь в тракте приемопередатчика. Указанный результат достигается тем, что в способе формирования сложных фазоманипулированных сигналов для корабельной радиолокационной станции в каждый сегмент сигнала введен строб импульсного сигнала, расположение которого посередине сегмента сигнала, и временной отрезок строба импульсного сигнала равен максимальной задержке отраженного сигнала от дальнего объекта, на которую рассчитана шкала радиолокационной станции. При этом непериодический сложный сигнал представлен в виде сосредоточенных во времени пачек, интервал следования которых равен максимальной задержке до цели, и располагаются сосредоточенные во времени пачки таким образом, чтобы отраженные сигналы от ближних и дальних целей не пересекались во времени. В корабельной радиолокационной станции с использованием сложных фазоманипулированных сигналов устройство формирования и обработки сигналов (УФОС) включено в состав антенного поста и расположено от радиопередатчика не более чем на 1 м. При этом УФОС выполнен на программируемой логической интегральной схеме (ПЛИС). ПЛИС соединена с процессором, предназначенным для обработки и вычисления навигационных данных по принимаемым ПЛИС сигналам от приемника отраженного сигнала в виде кодов амплитуды и фазы; и сигналам датчиков угла и передачи обработанных цифровых данных по сети Ethernet в радиопередатчик радиолокационной станции. 4 н. и 1 з.п. ф-лы, 4 ил.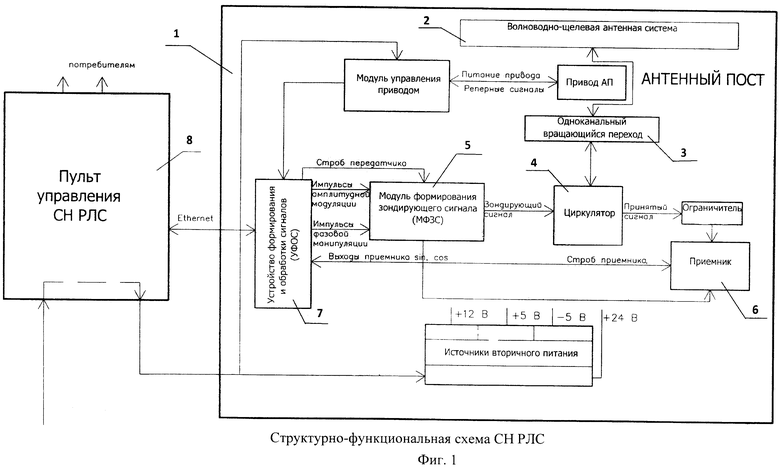
1. Способ формирования сложных фазоманипулированных сигналов для корабельной радиолокационной станции, заключающийся в том, что для определения дальности объекта по отраженному сигналу в качестве зондирующего сигнала используют непериодический сложный сигнал, длина временного отрезка которого является сегментом сигнала, при этом сегменты сигнала в течение времени накопления не повторяются, в каждый сегмент сигнала введен строб импульсного сигнала, расположение которого посередине сегмента сигнала и временной отрезок строба импульсного сигнала равен максимальной задержке отраженного сигнала от дальнего объекта, на которую рассчитана шкала радиолокационной станции, при этом непериодический сложный сигнал состоит в виде сосредоточенных во времени пачек, интервал следования которых равен максимальной задержке до цели, и располагаются сосредоточенные во времени пачки таким образом, чтобы отраженные сигналы от ближних и дальних целей не пересекались во времени.
2. Способ обработки принятого сложного фазоманипулированного сигнала, заключающийся в том, что принимают отраженный сигнал и производят его оцифровку, выделяют импульсный сигнал и режектируют импульсные помехи, на сегменте сигнала осуществляют свертку сигнала по пачкам путем корреляции принятого сигнала и непериодического сложного сигнала и осуществляют накопление в рециркуляторе пачек сегмента, формируют суммарный отклик импульсного строба и сложного сигнала, по которому рассчитывают скорость корабля с учетом среднего доплеровского смещения, определяют дальность до объекта путем компенсации собственной скорости корабля.
3. Корабельная радиолокационная станция с использованием сложных фазоманипулированных сигналов, содержащая антенный пост, включающий в себя волноводно-щелевую антенную систему, соединенную с вращающимся переходом, соединенным через ферритовый циркулятор с приемопередатчиком, выполненным в виде модуля формирователя зондирующего сигнала (МФЗС) и приемника отраженного сигнала, а также устройство формирования и обработки сигналов (УФОС), входы и выходы которого соединены с приемопередатчиком, и пульт управления, отличающаяся тем, что УФОС включен в состав антенного поста и расположен от радиопередатчика не более чем на 1 м, при этом УФОС выполнен на программируемой логической интегральной схеме (ПЛИС), формирующей сигнал на видеочастоте и передающей его на формирователь зондирующего сигнала в виде сложных фазоманипулированных сигналов и стробимпульсов и на приемник отраженных сигналов для приема отраженных сигналов и режекции импульсных помех, формирующей сигналы коммутации приемопередатчика для осуществления работы РЛС в двух режимах и подающей их на управляющие входы приемопередатчика в виде стробимпульсов, формирующей команды для управления приводом вращения антенного поста по принимаемым сигналам контроля и подачи команд управления во вращающуюся систему по цифровым линиям транзисторно-транзисторной логики (TTL), формирующей команды управления мощностью и чувствительностью приемника отраженных сигналов, причем ПЛИС соединена с процессором, предназначенным для обработки и вычисления навигационных данных по принимаемым ПЛИС сигналам от приемника отраженного сигнала в виде кодов амплитуды и фазы; и сигналам датчиков угла и передачи обработанных цифровых данных по сети Ethernet в радиопередатчик радиолокационной станции (РП РЛС).
4. Устройство по п.3, отличающееся тем, что процессор, предназначенный для обработки и вычисления навигационных данных, выполнен с возможностью последовательного осуществления действий: принимают отраженный сигнал и производят его оцифровку, выделяют импульсный сигнал и режектируют импульсные помехи, на сегменте сигнала осуществляют свертку сигнала по пачкам путем корреляции принятого сигнала и непериодического сложного сигнала и осуществляют накопление в рециркуляторе пачек сегмента, формируют суммарный отклик импульсного строба и сложного сигнала, по которому рассчитывают скорость корабля с учетом среднего доплеровского смещения, определяют дальность до объекта путем компенсации собственной скорости корабля.
5. Устройство формирования сложных сигналов, содержащее программируемую логическую интегральную схему (ПЛИС), выполненную с возможностью формировать сигнал на видеочастоте для зондирования в виде импульсов фазовой модуляции и формирования из принятых отраженных сигналов сигнала на нулевой частоте с режекцией импульсных помех для передачи их в приемник отраженных сигналов, с возможностью формирования сигналов коммутации для приемопередатчика и подачи их на управляющие входы приемопередатчика в виде стробимпульсов, с возможностью формирования командных сигналов по принимаемым сигналам для управления приводом вращения антенного поста и подачи команд управления во вращающуюся систему по цифровым линиям транзисторно-транзисторной логики (TTL), с возможностью формирования сигналов команд управления мощностью и чувствительностью приемника отраженных сигналов.
| СТАБИЛИЗИРОВАННЫЙ АНТЕННЫЙ ПОСТ СУДОВОЙ НАВИГАЦИОННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1997 |
|
RU2126570C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
| Устройство для непрерывного получения раствора из быстро твердеющих вяжущих | 1947 |
|
SU76464A1 |
| Наушники для заглушения шума | 1926 |
|
SU13928A1 |
| US 5179385 A, 12.01.1993 | |||
| EP 1990651 A1, 12.01.2008 | |||
| US 7710309 B2, 04.05.2010. | |||

