Изобретение относится к гидроакустике и может быть использовано для гидроакустических исследований и определения местоположения подводных и поверхностных объектов с использованием акустических комбинированных приемников.
Известны способы определения пеленга на источник шума, например определение пеленгов источников звука в горизонтальной плоскости (з. РФ №2002113840, МПК7 G01S 3/00). Способ основан на приеме акустических колебаний двумя линейными группами электроакустических преобразователей, преобразовании акустических сигналов в пропорциональные электрические сигналы, измерении этих сигналов, определении пеленга на источник звука с использованием величин электрических сигналов и определении пеленга на источник звука по отношению между измеренными электрическими сигналами.
Известен способ определения углов пеленга низколетящих целей в пространстве по их акустическим излучениям (з. РФ №95103536, МПК6 G01S 3/808). Способ заключается в измерении разности прихода фаз акустической волны между разнесенными точками приема, при этом с целью получения кругового сектора обнаружения без механических перемещений приемной системы приходящий акустический сигнал измеряют в трех фиксированных точках горизонтальной плоскости, находящихся в вершинах равностороннего треугольника, и по значениям разности фаз между различными точками приема определяют углы пеленга низколетящей цели в горизонтальной и вертикальной плоскостях.
Однако эти способы обладают невысокой точностью определения пеленга и низкой помехозащищенностью. Кроме того, для их реализации требуются сложные построения устройства, используется сложная конфигурация и большие размеры приемных систем.
Наиболее близким к заявляемому способу является способ определения пеленга на подводный объект, излучающий акустический гармонический сигнал с определенной частотой (п. РФ №2158430, МПК G01S 3/80). Способ включает генерацию и излучение подводным объектом вышеприведенного сигнала, прием сигнала приемником, состоящим, по меньшей мере, из восьми гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделение квадратурных составляющих комплексной огибающей принятых акустических сигналов и измерение их фазы. Сигналы, принятые гидрофонами базы, предварительно фазируют на N направлений, проходящих через центр базы и каждый из N гидрофонов. Определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении. Пеленг на источник в локальной системе координат, связанный с круговой базой, определяют по формуле с учетом угловых координат φn гидрофонов, числа гидрофонов, кумулятивной фазы θn на n-м гидрофоне относительно фазы на гидрофоне, лежащем на направлении максимума сигнала, то есть направление на источник определяется по максимуму амплитуды и изменению фазы.
Основным недостатком такого способа является требование о необходимости излучения подводным объектом искусственного гармонического сигнала и учет при расчете пеленга только акустического давления, а также необходимость большого количества гидрофонов, расположенных определенным образом, что приводит к сложности выполнения способа, низкой помехоустойчивости и точности.
Задача данного изобретения заключается в разработке помехоустойчивого способа определения пеленга на шумящий объект, упрощении способа и повышении его точности, расширении диапазона рабочих частот способа, что достигается за счет учета в способе одновременно как скалярных, так и векторных информационных характеристик акустического поля и на основе скачка разности фаз между акустическим давлением и горизонтальными компонентами колебательной скорости.
Поставленная задача решается способом определения пеленга на шумящий подводный или надводный объект, включающий измерение в одной точке акустического поля одновременно четырех физических величин: трех ортогональных компонент вектора колебательной скорости  и акустического давления p(t) с использованием комбинированного приемника, включающего векторный приемник и гидрофон, преобразование полученного сигнала в цифровой код, перевод его в аналитическую форму для определения разности фаз между акустическим давлением и ортогональными компонентами колебательной скорости при "электрическом" повороте вокруг оси z характеристики направленности векторного приемника и по скачку разности фаз между акустическим давлением p(t) и ортогональными компонентами колебательной скорости Vx(t, α) и Vy(t, α) определяют пеленг на шумящий объект.
и акустического давления p(t) с использованием комбинированного приемника, включающего векторный приемник и гидрофон, преобразование полученного сигнала в цифровой код, перевод его в аналитическую форму для определения разности фаз между акустическим давлением и ортогональными компонентами колебательной скорости при "электрическом" повороте вокруг оси z характеристики направленности векторного приемника и по скачку разности фаз между акустическим давлением p(t) и ортогональными компонентами колебательной скорости Vx(t, α) и Vy(t, α) определяют пеленг на шумящий объект.
Способ основан на постоянном "электрическом" вращении вокруг оси z горизонтальных осей координат x и y комбинированного приемника по формуле


где ux, uy - электрические сигналы с каналов x и y, при угле поворота α=0,  ,
,  - электрические сигналы, при повороте координат на азимутальный угол α.
- электрические сигналы, при повороте координат на азимутальный угол α.
Комбинированный приемник представляет собой устройство, включеющее векторный приемник и гидрофон [Щуров В.А. Векторная акустика океана. Дальнаука, 2003. 307 с.].
Скачок разности фаз происходит поочередно по одной из компонент колебательной скорости либо по Vx(t, α), либо по Vy(t, α), минимум характеристики направленности которой лежит на прямой, соединяющей комбинированный приемник и лоцируемый объект. При этом максимум характеристики направленности второй компоненты Vy(t, α) совпадает с минимумом направленности первой компоненты Vx(t, α).
После того как установлен сектор углов α0±Δα, в котором происходит скачок разности фаз на 180°, система координат x0y "качается" "электрическим" способом в угловом секторе α0±Δα для определения статистических характеристик: среднего значения <α0>и его среднеквадратического отклонения  . Угол <α0>, отсчитываемый от оси x, совпадает с направлением на источник шума.
. Угол <α0>, отсчитываемый от оси x, совпадает с направлением на источник шума.
Алгоритм способа включает в себя следующую последовательность операций. Четырехкомпонентный узкополосный акустический сигнал p(t, f0), Vx(t, f0), Vy(t, f0), Vz(t, f0), регистрируемый векторным приемником и гидрофоном, преобразуется в цифровой код, который в вычислительном блоке преобразуется в аналитическую форму с использованием обычного математического преобразования, например преобразования Фурье или Гильберта:
S=S-j·Re(TH(S)),
где TH(S) - преобразование Гильберта сигнала S.
Вычисляется отношение мнимой и вещественной части аналитического сигнала для получения тангенса фазы:
где P(f) - акустическое давление, зависящее только от времени t; Vx(t, α), Vy(t, α) - ортогональные компоненты колебательной скорости, зависящие от времени t и азимутального угла поворота α; φp(t), φx(t, α), φy(t, α) - усредненные значения фазы акустического давления и колебательной скорости аналитического сигнала. Величина усреднения по времени зависит от скорости движения шумящего объекта.
Вывод о наличии шумящего объекта в данном направлении α0 следует из скачка разности фаз между акустическим давлением p(t) и компонентами колебательной скорости Δφx=φp-φx или Δφy=φp-φy при переходе через α0 от α0-Δα до α0+Δα.
Для повышения точности пеленгования находятся производные от Δφx(t, α) и Δφy(t, α) по углу α:  ,
,  . Результирующий пеленг определяют как (α0+180°)±σα, где σα - среднеквадратичное отклонение.
. Результирующий пеленг определяют как (α0+180°)±σα, где σα - среднеквадратичное отклонение.
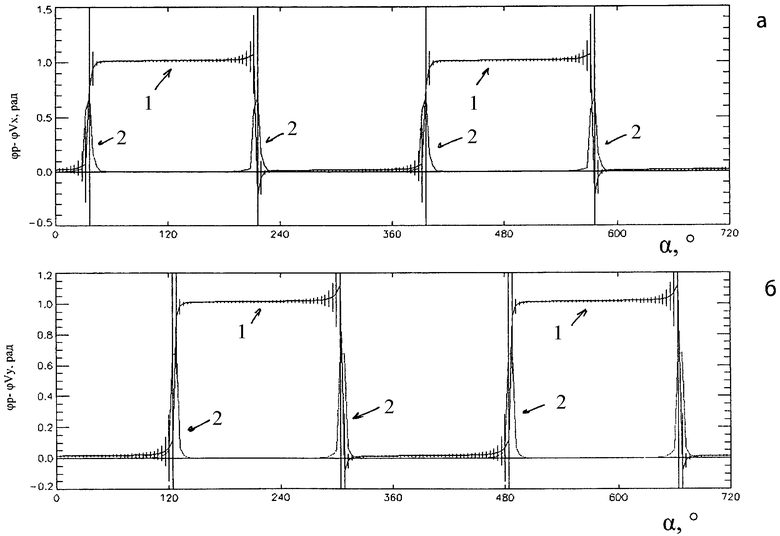
На чертеже приведены результаты пассивного лоцирования подводного источника. Глубина источника ≈60 м. Глубина комбинированного приемника 150 м. Скачки разности фаз а) - Δφx(α0, t0), б - Δφy(α0, t0); 1 - соответствуют кривым Δφ(α0, t0), Δφy(α0, t0), 2 - их производным. Вертикальные линии на кривых соответствуют σx и σy. Угол поворота α измеряется в градусах, разность фаз - в радианах. Источник находился на глубине около 60 м. Комбинированный приемник находился на глубине 150 м. Частота, на которой проводилось пассивное лоцирование объекта, равна 617 Гц. Полоса анализа Δf=3 Гц. Отношение сигнал/шум не более 3 dB. По первому скачку разности фаз (чертеж, а) следует, что α0 равно 32,5°±5,0° и пеленг на объект равен 212,5°±5,0°.
Таким образом, заявляемый способ позволяет достичь заявляемый технический результат и обнаружить в пассивном режиме поверхностный или подводный объект по излучению им шумоподобного сигнала, а не по излучению им искусственно генерируемых гармонических колебаний. Переход от амплитудных характеристик к фазовым существенно увеличил помехозащищенность способа, поскольку разность фаз Δφx(t, α) и Δφy(t, α) принимает только два значения 0° или 180° и переход от одного значения разности фаз к другому происходит скачком. В заявляемом способе направление на источник определяется только по скачку разности фаз между акустическим давлением и горизонтальными компонентами колебательной скорости, равному 180°, в то время как в прототипе направление на источник определяется по максимуму амплитуды и изменению фазы. Кроме того, вместо набора из N гидрофонов (минимум 8 в прототипе) возможно использование одного практически точечного комбинированного приемника, включающего векторный приемник и гидрофон.
Изобретение относится к гидроакустике и может быть использовано для гидроакустических исследований и определения местоположения подводных и поверхностных объектов с использованием акустических комбинированных приемников. Заявленный способ заключается в приеме акустического сигнала при "электрическом" вращении диаграммы направленности компонент x и y комбинированного приемника, состоящего из векторного приемника и гидрофона. Принятый сигнал подвергается аналого-цифровому преобразованию посредством преобразования Гильберта или Фурье с последующим преобразованием сигнала в аналитическую форму. Далее осуществляют вычисление отношения мнимой части сигнала к реальной и оценку по этому отношению разности фаз между акустическим давлением p(t) и ортогональными компонентами колебательной скорости  . При обнаружение скачка разности фаз на 180° определяют пеленг на шумящий объект. Технический результат заключается в расширении диапазона рабочих частот способа (при низкочастотном приемнике от 5 Гц до 800 Гц; при среднечастотном приемнике от 500 Гц до 11 кГц). 1 ил.
. При обнаружение скачка разности фаз на 180° определяют пеленг на шумящий объект. Технический результат заключается в расширении диапазона рабочих частот способа (при низкочастотном приемнике от 5 Гц до 800 Гц; при среднечастотном приемнике от 500 Гц до 11 кГц). 1 ил.
Способ определения пеленга на шумящий подводный или надводный объект, включающий измерение в одной точке акустического поля одновременно четырех физических величин: трех ортогональных компонент вектора колебательной скорости  и акустического давления p(t) с использованием комбинированного приемника, включающего векторный приемник и гидрофон, преобразование полученного сигнала в цифровой код, перевод его в аналитическую форму, вычисление отношения мнимой части сигнала к реальной для получения тангенса фазы и по скачку разности фаз между акустическим давлением p(t) и ортогональными компонентами колебательной скорости Vx(t, α) и Vy(t, α) при "электрическом" повороте вокруг оси z характеристики направленности векторного приемника определяют пеленг на шумящий объект.
и акустического давления p(t) с использованием комбинированного приемника, включающего векторный приемник и гидрофон, преобразование полученного сигнала в цифровой код, перевод его в аналитическую форму, вычисление отношения мнимой части сигнала к реальной для получения тангенса фазы и по скачку разности фаз между акустическим давлением p(t) и ортогональными компонентами колебательной скорости Vx(t, α) и Vy(t, α) при "электрическом" повороте вокруг оси z характеристики направленности векторного приемника определяют пеленг на шумящий объект.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ИСТОЧНИК ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2158430C2 |
| RU 95103536 A1, 27.12.1996 | |||
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ВЫСОКОКАЧЕСТВЕННОГО БЫСТРОГО ПОИСКА ПРОГНОЗИРУЕМОГО ДВИЖЕНИЯ | 2003 |
|
RU2323541C2 |
| US 3886553 А, 27.05.1975. | |||

