Изобретение относится к области гидроакустики и может быть использовано для определения местоположения подводных объектов с использованием звуковых колебаний.
Известен способ определения пеленга на источник излучения и известно устройство для его осуществления [1]. Способ заключается в формировании направленного приема с помощью устройства в виде многоэлементной антенны, апертура которой достаточно велика по сравнению с длиной волны.
Общим недостатком такого способа и устройства для его осуществления является сравнительно большая погрешность пеленгования.
Известен также способ определения пеленга на источник излучения, в котором для уменьшения погрешности пеленгования используется фазовая информация [2]. Известный способ определения пеленга на источник излучения включает генерацию и излучение источником гармонического сигнала частотой ω, прием акустического сигнала набором из N гидрофонов, образующих ориентированную в горизонтальной плоскости круговую базу, выделение квадратурных составляющих комплексной огибающей принятых сигналов, коммутацию квадратурных составляющих, определяющих фазу на гидрофонах круговой базы, с некоторой частотой F1 на общий выход, стробирование выходного сигнала с некоторой частотой F2, не равной частоте F1, измерение фазы сигнала по его квадратурным составляющим на выходе стробирующего устройства и ее изменчивости во времени. При дальнейшей обработке фазовой информации используется то обстоятельство, что сигнал на выходе электронного коммутатора подобен сигналу от движущегося источника, фаза которого изменяется во времени с некоторой псевдодоплеровской частотой, а за пеленг на источник принимается направление, для которого скорость изменения фазы максимальна.
Для уменьшения погрешности пеленгования, связанной с дискретностью круговой базы и дискретным изменением ее фазовой характеристики, выходной сигнал электронного коммутатора сглаживается интерполяционным фильтром, а за счет стробоскопического эффекта при F2 ≠ F1 организуется вращение фазовой характеристики круговой базы, эквивалентное вращению самой базы, что позволяет с минимальной погрешностью определять максимум скорости изменения фазы и пеленг на источник.
Известный способ определения пеленга на источник излучения осуществляется через известное устройство [2], содержащее ориентированную в горизонтальной плоскости круговую базу из N гидрофонов, расстояние между которыми не превышает половины длины волны, N-канальный приемник, входы, которого соединены с выходами N гидрофонов базы, N-канальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, первые N входов которого соединены с выходами N-канального приемника, умножитель, первые 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок управления коммутацией, первые N выходов которого соединены с 2N входами умножителя, задатчик синхроимпульсов с частотой следования F0, выход которого соединен со входом блока управления коммутацией, электронный коммутатор, первые два входа которого соединены с двумя выходами умножителя, а вторые два входа соединены со вторым выходом блока управления коммутацией, интерполяционный фильтр, два входа которого соединены с двумя выходами электронного коммутатора, стробирующее устройство, первые два входа которого соединены с двумя выходами интерполяционного фильтра, а два вторых входа - с третьим выходом блока управления коммутацией, блок измерения фазовой характеристики базы, первые два входа которого соединены с двумя выходами стробирующего устройства, а второй вход - с четвертым выходом блока управления коммутацией.
Известный способ определения пеленга на источник излучения и известное устройство для определения пеленга на источник излучения по своему функциональному назначению, по своей технической сущности и по достигаемому техническому результату наиболее близки к заявленным способу и устройству его осуществляющему.
Недостатком известного способа определения пеленга на источник излучения и устройства его реализующего является также большое время пеленгования и невозможность реализации способа при малом времени излучения сигнала источником, например, в импульсном режиме в течение длительности одного импульса.
В основу изобретений поставлена задача разработать такой способ определения пеленга на источник излучения и устройство его осуществляющее, которые позволят уменьшить погрешность измерения пеленга при малом времени наблюдения сигнала излучения.
Поставленная задача решается тем, что в способе определения пеленга на источник излучения, заключающемся в генерации и излучении источником гармоничного сигнала частотой ω, приеме акустического сигнала набором из N гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов, измерении фазы принятых акустических сигналов, круговую измерительную базу набирают по меньшей мере из восьми гидрофонов, сигналы, принятые гидрофонами базы, предварительно фазируют на N направлений, проходящих через центр базы и каждый из N гидрофонов, определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении, а пеленг на источник в локальной системе координат, связанной с круговой базой, определяют по формуле

 угловая координата n-го гидрофона базы;
угловая координата n-го гидрофона базы;
n= 1, 2,...N,N - число гидрофонов базы;
ψn - кумулятивная фаза на n-ном гидрофоне базы относительно фазы на первом гидрофоне, относительно которого отсчитываются углы ϕn, θ0, вычисляемая по формуле ψn = (ψn-ψn-1)+(ψn-1-ψn-2)+...(ψ2-ψ1), причем первым гидрофоном считают лежащий на направлении максимума сигнала.
Поставленная задача решается также тем, что в устройство для определения пеленга на источник излучения, содержащее ориентированную в горизонтальной плоскости круговую измерительную базу из N приемных гидрофонов, N-канальный приемник, входы которого соединены с выходами N гидрофонов базы, N-канальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, первые N входов которого соединены с выходами N-канального приемника, генератор опорного сигнала частоты  выход которого соединен со вторыми N входами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов и измеритель фазы принятых сигналов, введены блок фазирования принятых сигналов на N направлений, проходящих через центр базы и каждый из N гидрофонов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок выбора максимального значения, вход которого соединен с N выходами блока фазирования принятых сигналов, измеритель фазы принятых сигналов выполнен N-канальным, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, а также введен вычислитель пеленга, первые N входов которого соединены с N выходами измерителя фазы принятых сигналов, а второй вход соединен с выходом блока выбора максимального значения, причем круговую измерительную базу набирают по меньшей мере из восьми гидрофонов, а расстояние между гидрофонами круговой измерительной базы больше половины длины и меньше длины волны.
выход которого соединен со вторыми N входами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов и измеритель фазы принятых сигналов, введены блок фазирования принятых сигналов на N направлений, проходящих через центр базы и каждый из N гидрофонов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок выбора максимального значения, вход которого соединен с N выходами блока фазирования принятых сигналов, измеритель фазы принятых сигналов выполнен N-канальным, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, а также введен вычислитель пеленга, первые N входов которого соединены с N выходами измерителя фазы принятых сигналов, а второй вход соединен с выходом блока выбора максимального значения, причем круговую измерительную базу набирают по меньшей мере из восьми гидрофонов, а расстояние между гидрофонами круговой измерительной базы больше половины длины и меньше длины волны.
Увеличение расстояния между гидрофонами в два раза в сравнении с прототипом без нарушения условия однозначности пеленгования позволяет вдвое уменьшить погрешность пеленгования.
Следовательно, способ определения пеленга на источник излучения и устройство для его осуществления объединены единым изобретательским замыслом, на решение которого они направлены, т.к. только посредством всей совокупности признаков заявленных способа и устройства для его осуществления достигается единый технический результат - уменьшение погрешности измерения пеленга при малом времени наблюдения сигнала.
Совокупность существенных признаков заявленных способа определения пеленга на источник излучения и устройства для его осуществления имеют причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков способа и устройства стало возможным решить поставленную задачу.
На основании изложенного можно заключить, что заявленные способ определения пеленга на источник излучения и устройство для его осуществления являются новыми, обладают изобретательским уровнем, т.е. они явным образом не следуют из уровня техники и пригодны для промышленного применения.
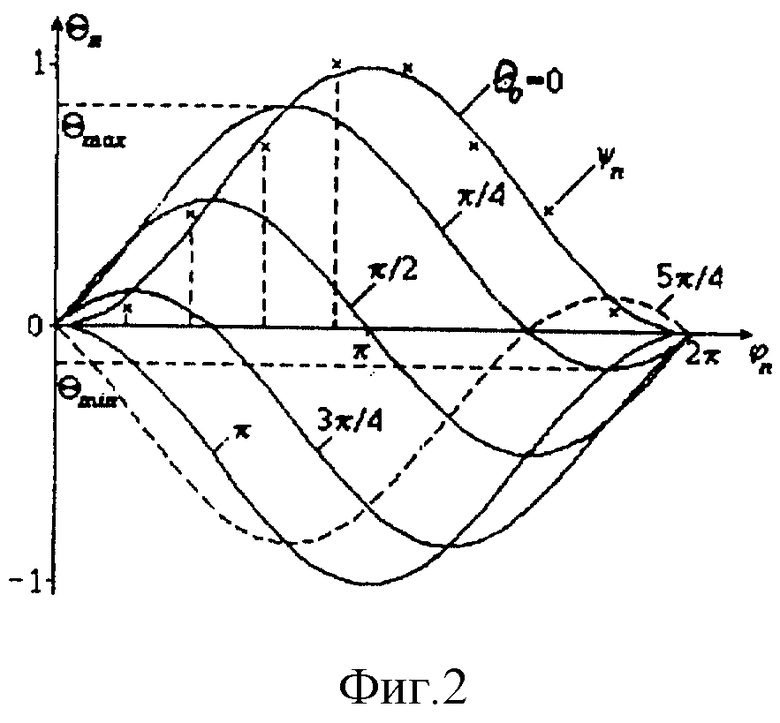
Сущность заявленных способа определения пеленга на источник излучения и устройство для его осуществления поясняется чертежами, где на фиг.1 приведена круговая измерительная база пеленгатора; на фиг.2 - зависимость кумулятивной фазы θn на n-гидрофоне базы от угловой координаты ϕn гидрофона и угла пеленга θ0; на фиг.3 - блок-схема устройства для измерения пеленга на источник излучения.
Для реализации заявляемого способа пеленгования генерируют и излучают источником гармонического сигнала частотой ω акустический сигнал, который принимают N гидрофонами круговой измерительной базы, ориентированной в горизонтальной плоскости. Сигналы, принятые гидрофонами базы предварительно фазируют на N направлений, проходящих через центр базы и каждый из N гидрофонов. Затем выделяют квадратурные составляющие комплексной огибающей принятых и акустических сигналов, измеряют фазу принятых акустических сигналов, определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении. Пеленг на источник в локальной системе координат, связанной с круговой измерительной базой определяют по формуле (1). При числе гидрофонов круговой измерительной базы N больше или равное 8 характеристика направленности круговой измерительной базы, сфазированной на любое из N направлений, проходящих через центр круговой измерительной базы и каждый из N гидрофонов, оказывается однонаправленной с подавлением боковых лепестков примерно на 6 дБ, а ширина характеристики направленности в направлении главного максимума составляет 30 - 35o.
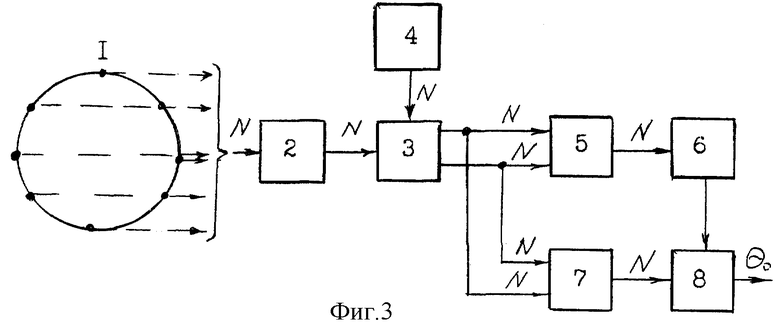
Устройство для определения пеленга на источник излучения содержит круговую измерительную базу 1, N-канальный приемник 2, блок 3 выделения квадратурных составляющих комплексной огибающей сигнала, опорный генератор 4, блок 5 фазирования на N-направлений, блок 6 выбора максимального значения, блок 7 измерения фазы и вычислитель 8 пеленга.
Входы N-канального приемника 2 соединены с выходами N гидрофонов базы, N входов N-канального блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов соединены с выходами N-канального приемника 2. Выход генератора 4 опорного сигнала частоты  соединен с вторыми N входами блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов. 2N входов блока 5 фазирования соединены с 2N выходами блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов. Вход блока 6 выбора максимального значения соединен с N выходами блока 5 фазирования принятых сигналов. Блок 7 измерения фазы принятых сигналов выполнен N-канальным, 2N входов которого соединены с 2N выходами блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов. Первые N входов вычислителя 8 пеленга соединены с N выходами блока 7 измерения фазы принятых сигналов, а второй вход соединен с выходом блока 6 выбора максимального значения.
соединен с вторыми N входами блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов. 2N входов блока 5 фазирования соединены с 2N выходами блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов. Вход блока 6 выбора максимального значения соединен с N выходами блока 5 фазирования принятых сигналов. Блок 7 измерения фазы принятых сигналов выполнен N-канальным, 2N входов которого соединены с 2N выходами блока 3 выделения квадратурных составляющих комплексной огибающей принятых сигналов. Первые N входов вычислителя 8 пеленга соединены с N выходами блока 7 измерения фазы принятых сигналов, а второй вход соединен с выходом блока 6 выбора максимального значения.
Устройство для определения пеленга на источник излучения работает следующим образом.
Акустический сигнал, принятый N гидрофонами круговой измерительной базы 1, ориентированной в горизонтальной плоскости, усиливается N-канальным приемником 2 и поступает на первые N входов блока 3 выделения квадратурных составляющих комплексной огибающей сигнала, на второй вход которого поступает сигнал частоты ω опорного генератора 4. Затем сигналы с выхода блока 3 выделения квадратурных составляющих поступают на 2N входов блока 5 фазирования на N направлений и блок 7 измерения фазы. С выхода блока 5 фазирования сигналы поступают в блок 6 выбора максимального значения, в котором грубо определяется пеленг на источник и номер гидрофона, лежащего на направлении максимума сигнала. Измеренные N значений кумулятивной фазы с выхода блока 7 измерения фазы и грубо определенное в блоке 6 выбора максимального значения значение пеленга поступают в вычислитель 8 пеленга, который обрабатывает всю измерительную информацию по алгоритму (1) с минимальной погрешностью. Это объясняется тем, что зависимость кумулятивной фазы θn на n-гидрофоне базы от угловой координаты ϕn гидрофона и угла пеленга θ0 описывается в источнике [3] аналитически выражением
где К= ω /c - волновое число;
ω - круговая частота;
c - скорость звука;
R- радиус круговой измерительной базы.
Аппроксимируя зависимостью (2) измеренные экспериментально значения кумулятивной фазы ψn и минимизируя погрешность аппроксимации по методу наименьших квадратов, получаем формулу (1) для определения истинного пеленга θ0.
Источники информации
1. А.С.Колчеданцев. Гидроакустические станции. - Л.: Судостроение, 1982, с. 42-49.
2. Патент ФРГ N 2323541, МПК 2 G O1 S 3/80, 1973 - прототип.
3. Морские технологии /Под общей редакцией академика М.Д.Агеева. Вып. 1. Владивосток: Дальнаука, 1996, с. 69-73.
Способ определения пеленга на источник излучения заключается в генерации и излучении источником гармонического сигнала с частотой  приеме акустического сигала набором по меньшей мере из восьми гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов и измерении фазы принятых акустических сигналов. Сигналы, принятые гидрофонами базы, предварительно фазируют на N направлений, проходящих через центр базы и каждый из N гидрофонов. Определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении. Пеленг на источник в локальной системе координат, связанный с круговой базой, определяют по формуле с учетом угловых координат ϕn гидрофонов, числа гидрофонов, кумулятивной фазы Ψn на n-м гидрофоне относительно фазы на первом гидрофоне, за который принимают гидрофон, лежащий на направлении максимума сигнала. Устройство содержит круговую базу из N приемных гидрофонов, N-канальный приемник, N-канальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, генератор опорного сигнала частоты
приеме акустического сигала набором по меньшей мере из восьми гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов и измерении фазы принятых акустических сигналов. Сигналы, принятые гидрофонами базы, предварительно фазируют на N направлений, проходящих через центр базы и каждый из N гидрофонов. Определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении. Пеленг на источник в локальной системе координат, связанный с круговой базой, определяют по формуле с учетом угловых координат ϕn гидрофонов, числа гидрофонов, кумулятивной фазы Ψn на n-м гидрофоне относительно фазы на первом гидрофоне, за который принимают гидрофон, лежащий на направлении максимума сигнала. Устройство содержит круговую базу из N приемных гидрофонов, N-канальный приемник, N-канальный блок выделения квадратурных составляющих комплексной огибающей принятых сигналов, генератор опорного сигнала частоты  измеритель фазы принятых сигналов, блок фазирования принятых сигналов на N направлений, блок выбора максимального значения и вычислитель пеленга. Технический результат заключается в уменьшении погрешности при малом времени излучения сигнала источником. 2 с.п.ф-лы, 3 ил.
измеритель фазы принятых сигналов, блок фазирования принятых сигналов на N направлений, блок выбора максимального значения и вычислитель пеленга. Технический результат заключается в уменьшении погрешности при малом времени излучения сигнала источником. 2 с.п.ф-лы, 3 ил.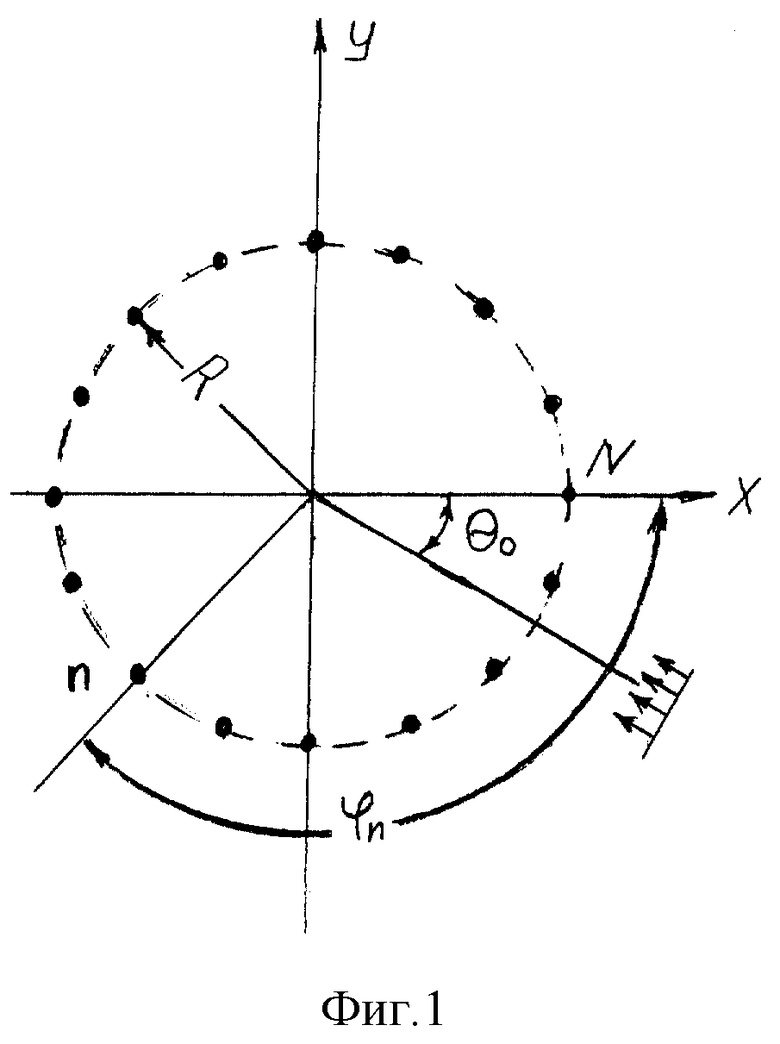
 приеме акустического сигнала набором из N гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов и измерении фазы принятых акустических сигналов, отличающийся тем, что круговую измерительную базу набирают по меньшей мере из восьми гидрофонов, сигналы, принятые гидрофонами базы, предварительно фазируют на N направлений, проходящих через центр базы и каждый из N гидрофонов, определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении, а пеленг на источник в локальной системе координат, связанный с круговой базой, определяют по формуле
приеме акустического сигнала набором из N гидрофонов, образующих ориентированную в горизонтальной плоскости круговую измерительную базу, выделении квадратурных составляющих комплексной огибающей принятых акустических сигналов и измерении фазы принятых акустических сигналов, отличающийся тем, что круговую измерительную базу набирают по меньшей мере из восьми гидрофонов, сигналы, принятые гидрофонами базы, предварительно фазируют на N направлений, проходящих через центр базы и каждый из N гидрофонов, определяют направление, соответствующее максимуму сигнала, и гидрофон, лежащий на этом направлении, а пеленг на источник в локальной системе координат, связанный с круговой базой, определяют по формуле

 угловая координата n-го гидрофона базы;
угловая координата n-го гидрофона базы;
n = 1,2,......N, N - число гидрофонов базы;
Ψn - комулятивная фаза на n-ом гидрофоне базы относительно фазы на первом гидрофоне, относительно которого отсчитываются углы ϕn, θ0, вычисляемая по формуле Ψn = (Ψn-Ψn-1)+(Ψn-1-Ψn-2)+...(Ψ2-Ψ1),
причем первым гидрофоном считают лежащий на направлении максимума сигнала. вход которого соединен с вторыми N входами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, и измеритель фазы принятых сигналов, отличающееся тем, что в него введены блок фазирования принятых сигналов на N направлений, проходящих через центр базы и каждый из N гидрофонов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок выбора максимального значения, вход которого соединен с N выходами блока фазирования принятых сигналов, измеритель фазы принятых сигналов выполнен N канальным, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, и введен вычислитель пеленга, первые N входов которого соединены с N выходами измерителя фазы принятых сигналов, а второй вход - с выходом блока выбора максимального значения, причем круговую измерительную базу набирают по меньшей мере из восьми гидрофонов, а расстояние между гидрофонами круговой измерительной базы больше половины длины волны и меньше длины волны.
вход которого соединен с вторыми N входами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, и измеритель фазы принятых сигналов, отличающееся тем, что в него введены блок фазирования принятых сигналов на N направлений, проходящих через центр базы и каждый из N гидрофонов, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, блок выбора максимального значения, вход которого соединен с N выходами блока фазирования принятых сигналов, измеритель фазы принятых сигналов выполнен N канальным, 2N входов которого соединены с 2N выходами блока выделения квадратурных составляющих комплексной огибающей принятых сигналов, и введен вычислитель пеленга, первые N входов которого соединены с N выходами измерителя фазы принятых сигналов, а второй вход - с выходом блока выбора максимального значения, причем круговую измерительную базу набирают по меньшей мере из восьми гидрофонов, а расстояние между гидрофонами круговой измерительной базы больше половины длины волны и меньше длины волны.
| RU 95105314 A1, 20.08.1996 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ВЫСОКОКАЧЕСТВЕННОГО БЫСТРОГО ПОИСКА ПРОГНОЗИРУЕМОГО ДВИЖЕНИЯ | 2003 |
|
RU2323541C2 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2010 |
|
RU2444943C1 |

