Изобретение относится к области механики, а именно к конструкторам для образования, в частности к конструктору для сборки робота.
Известен обучающий конструктор в виде сборных электронных моделей (Модульные электронные строительные системы с магнитными взаимосвязями и способы их применения: патент №2686521, Российская Федерация, заявка № RU 2015110259, заявл. 26.08.2013, опубл. 29.04.2019), включающие электрические соединители, электрические модули и системы. В одном аспекте, электрический соединитель включает в себя корпус, ограничивающий боковую поверхность, электрический проводник, поддерживаемый корпусом и включающий в себя контактный участок вблизи боковой поверхности корпуса. Контактный участок адаптирован к контакту с другим электрическим проводником другого электрического соединителя. Соединитель также включает в себя магнит, поддерживаемый корпусом, вблизи боковой поверхности корпуса. В других аспектах, электрический модуль включает в себя, по меньшей мере, один из этих электрических соединителей. В дополнительных аспектах система включает в себя множество этих модулей, а модули являются избирательно соединяемыми друг с другом. Технический результат заключается в расширении технических возможностей интерактивных обучающих электронных конструкторов.
Недостатком данного технического решения является относительно низкая надежность, обусловленная отсутствием конструктивных элементов, обеспечивающих прочность конструкции. При падении на твердую поверхность элементы такого конструктора с большой вероятностью будут повреждены.
Известен сборный мобильный робот (Сборный мобильный робот: патент №174140, Российская Федерация, заявка № RU 2016125517, заявл. 24.06.2016, опубл. 04.10.2017), содержащий платформу, два колеса, два колесных вала со смонтированными на них колесами, установленные на платформе две колесные вилки, два электродвигателя, выходные валы которых кинематически связаны с лежащими на одной прямой валами первого и второго колес, источник питания, бортовую вычислительную сеть, выполненную с возможностью сбора и обработки данных с одометрических датчиков первого и второго колес и формирования, и передачи управляющих сигналов на электродвигатели первого и второго колес. При этом робот также содержит сборный реконфигурируемый корпус, содержащий формообразующие части и соединительные элементы с технологическими отверстиями, при этом выступы соединительных элементов, вставленные в симметрично расположенные по периметру платформы и формообразующих частей пазы, закреплены соединительными механизмами, третье и четвертое шар-колесо, расположенные по разные стороны от оси первого и второго колеса и прикрепленные к платформе, установленный на корпусе блок исполнительных механизмов, бортовая вычислительная сеть включает блок перепрограммируемого управления, блок датчиков расстояния, блок датчиков оптического потока, блок датчиков позиционирования и навигации, коммуникационный блок.
Недостатком данного технического решения является относительно низкая надежность и относительно низкое удобство эксплуатации. Относительно низкая надежность обусловлена отсутствием конструктивных элементов, обеспечивающих прочность конструкции. Относительно низкое удобство эксплуатации обусловлено тем, что соединение элементов сборного робота осуществляется с помощью установки выступов в пазы, что не позволяет быстро и удобно сочленить элементы.
Техническая проблема заключается в необходимости разработки простого в производстве, быстрого и удобного в сборке для последующего программирования, а также надежного робота-конструктора с широкими функциональными возможностями, лишенного вышеприведенных недостатков.
Технический результат состоит в повышении прочности робота-конструктора при одновременном расширении его функциональных возможностей и удобства эксплуатации.
Технический результат достигается тем, что в конструкторе для сборки робота, содержащем корпус, контроллер, мотор-редуктор, соединенные с контроллером колесные валы, соединенные с мотором-редуктором колеса, закрепленные на колесных валах, и источник питания, располагаемый внутри корпуса и соединенный с контроллером, а также робот содержит съемные модули, которые крепятся к корпусу с помощью соединительных элементов, согласно изобретению корпус выполнен в виде металлического каркаса и жестко закрепленных на его нижней и верхней поверхностях полимерных пластин, при этом источник питания расположен внутри металлического каркаса, а мотор-редуктор и колесные валы расположены между полимерных пластин по периметру корпуса, при этом соединительные элементы на корпусе представляют собой расположенные на поверхностях пластин магниты, а соединительные элементы на съемных модулях представляют собой металлические болты.
Выполнение корпуса в виде металлического каркаса и жестко закрепленных на его нижней и верхней поверхностях полимерных пластин, а также расположение источника питания внутри указанного каркаса обеспечивает высокую прочность конструкции и простоту эксплуатации. В предпочтительном варианте реализации изобретения металлический каркас выполнен из нержавеющей стали, что также положительно влияет на прочность конструкции, а также повышает технологичность изготовления и сборки конструкции. Выполнение в каркасе и пластинах резьбовых отверстий позволяет достаточно просто и прочно закрепить на корпусе несъемные элементы (например, электропривод или колесные валы) с помощью болтов без использования гаек. В качестве полимерного материала предпочтительно использование ABS-пластика, так как этот материал обладает высокой устойчивостью к различным внешним средам, высокими электроизоляционными свойствами, а также относительно легко поддается обработке и является экологически чистым. Выполнение соединительных элементов на корпусе в виде расположенных на поверхностях пластин магнитов, а также выполнение соединительных элементов на съемных модулях в виде металлических болтов (которые также упрощают сборку корпусов съемных модулей) значительно повышает удобство эксплуатации без ущерба прочности конструкции и пригодно для использования детей более младшего возраста, что расширяет аудиторию возможных пользователей заявляемого устройства.
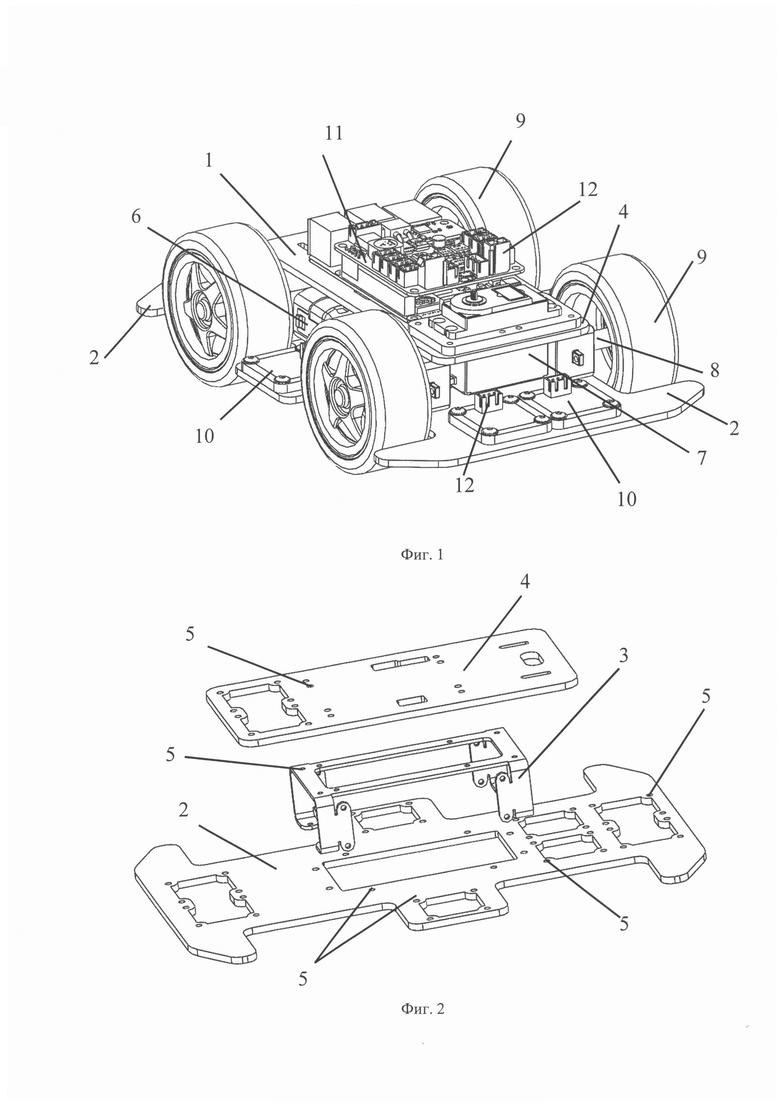
Заявляемое изобретение поясняется чертежами, где на фиг. 1 представлен робот-конструктор в общем виде, на фиг. 2 представлен вариант выполнения корпуса робота-конструктора в разборе.
Конструктор для сборки робота содержит корпус 1, который включает металлический каркас 3, нижнюю полимерную пластину 2 и верхнюю полимерную пластину 4. В качестве полимера для всех элементов робота-конструктора предпочтительно использовать ABS-пластик. В металлическом каркасе 3, предпочтительно выполненного из нержавеющей стали и полимерных пластинах 2, 4 выполнены резьбовые отверстия 5. Элементы корпуса, а именно каркас 3 и полимерные пластины 2, 4 соединены между собой с помощью болтов, вкрученных в резьбовые отверстия 5. Между полимерными пластинами 2, 4 расположены моторы-редукторы 6, источник питания 7, и колесные валы 8. Моторы-редукторы 6 и источник питания 7 соединены с контроллером. При этом моторы-редукторы 6 и источник питания 7 соединены с корпусом с помощью болтов, которые вкручены в резьбовые отверстия 5. Каждый колесный вал 8 соединен с соответствующим мотором-редуктором 6, а также к каждому колесному валу 8 прикреплено соответствующее колесо 9. При этом источник питания 7 расположен внутри металлического каркаса 3, а остальные элементы расположены за его пределами. Моторы-редукторы 6 и колесные валы 8 расположены по периметру корпуса 1 между пластинами 2, 4. В предпочтительном варианте робот-конструктор снабжен четырьмя колесными валами 8 (один вал для одного мотора-редуктора 6 и одного колеса) и четырьмя колесами 9. С помощью соединительных элементов (не показаны на чертеже) к корпусу 1 прикрепляются съемные модули 10. Соединительные элементы, расположенные на пластинах 2, 4 представляют собой магниты (не показаны на чертеже), а соединительные элементы на съемных модулях 10 представляют собой металлические болты (не показаны на чертеже). На корпусе 1, а именно на его верхней пластине 4 отведено специальное посадочной место для контроллера 11. На пластинах вблизи съемных модулей 10 и контроллере 11 размещены контактные разъемы 12. Контроллер крепится к корпусу 1 с помощью соединительных элементов аналогично съемным модулям. Все несъемные элементы соединены между собой с помощью проводов. Контактные разъемы съемных модулей 10 подключаются к контактным разъемам 12 на корпусе 1 с помощью проводов. Контроллер 11 робота представляет собой прямоугольную плату (полноценную ЭВМ) с расположенными на ней необходимыми для работы робота электронными компонентами и разъемами (например, контроллер может включать микропроцессор для программирования и управления, драйвер электроприводов для управления до двух независимых моторов постоянного тока, беспроводной передатчик bluetooth или wifi, модуль понижения и фильтрации входного питания, а также управляемый светодиод). При этом контроллер 11 аналогично съемным модулям содержит соединительные элементы в виде болтов. Каждый съемный модуль включает отдельный полимерный корпус и плату, соединенные между собой металлическими болтами, а также каждый модуль 10 содержит закрепленный на его полимерном корпусе функциональный элемент (не показан на чертеже), отвечающий за его роль в работе робота. Каждый модуль или датчик имеет один контактный разъем 12 для подключения его к контроллеру. Сам контроллер имеет по меньшей мере десять разъемов для подключения модулей или датчиков, один разъем для подключения питания (от источника питания 7), два разъема для подключения моторов-редукторов 6 и USB-разъем для программирования контроллера.
Кроме того, корпус оснащен USB-разъемом (не показан на чертеже) для подключения к компьютеру и программирования робота. При этом в качестве функционального элемента модуля 10 могут быть использованы следующие устройства: кнопка, геркон, датчик прикосновения, энкодер, датчик преграды, датчик угла поворота, датчик линии, датчик температуры, датчик расстояния, датчик освещенности, датчик холла. Кроме того, для крепления съемных модулей 10 под углом может быть предусмотрен специальный модуль переходник (не показан на чертеже), позволяющий регулировать наклон в различных положениях. При этом разъемы источника питания 7, моторов-редукторов 6 и съемных модулей 10 отличаются между собой для предотвращения ошибки при подключении и ключем, который определяет положение разъема при подключении. Таким образом съемные модули 10 представляют собой унифицированные по габаритам платы в отдельном корпусе и являются взаимозаменяемыми как по механическому креплению, так и по подключению, что позволяет быстро менять и расширять функционал робота. Вышеприведенные конструктивные особенности позволяют получить простой в изготовлении робот-конструктор обладающий высокой прочностью и широкими функциональными возможностями.
Заявляемое устройство работает следующим образом.
Перед началом сборки робота пользователь продумывает функционал, необходимый для последующего программирования и выбирает необходимый набор датчиков и модулей, которые будут обеспечивать данный функционал. Затем пользователь берет собранный на заводе изготовителе корпус 1 (который включает металлический каркас 3, полимерные пластины 2, 4 соединительные элементы 10 и остальные элементы, установленные внутри корпуса, а также закрепленный с помощью соединительных элементов контроллер). Затем пользователь размещает выбранные модули и датчики (каждый из которых оснащен отдельным полимерным корпусом и своими соединительными элементами 10 в виде болтов), на магнитных креплениях робота таким образом, чтобы разъем для электрического соединения к контроллеру 11 был направлен к центру робота (чтобы контактный разъем 12 на корпусе и на съемном модуле были сопряжены). Затем пользователь размещает в средней части робота (сверху верхней пластины 4) на специальных магнитных креплениях контроллер робота 11 и подсоединяет к нему все необходимые провода: от источника питания 7, от моторов-редукторов 6, а также от датчиков (модулей). После чего пользователь подключает собранного робота через USB-кабель к компьютеру для программирования и дальнейшего использования. При окончании работы пользователь разбирает робота до первоначального состояния -разъединяет провода, снимает с магнитных креплений электронные платы и убирает набор обратно в коробку в специально отведенные для этого места. При использовании робота при его сборке возможна сборка и в другом порядке, например вначале крепление контроллера, затем датчиков и модулей на усмотрение пользователя.
Сборка при производстве робота происходит следующем образом.
К корпусу 3, вырезанному лазером из листа металла, согнутого и с нарезанной резьбой 5, вначале болтовым соединением в средней части крепится источник питания 7, затем болтовым соединением крепятся мотор-редукторы 6 с уже припаянными проводами перед сборкой к боковым граням каркаса, затем к валам 8 мотор-редукторов 6 крепятся колеса 9, после чего к получившейся конструкции к ее нижней и верхней части крепятся пластиковые корпусные детали (полимерные пластины 2, 4), которые вырезаются на лазере из листового пластика и запрессовываются магниты в отверстия для крепления электронных плат. При сборке датчиков и модулей берутся электронные платы с напаянными компонентами и разъемами и прикручиваются болтами к пластиковым деталям (которые соединяются болтами и образуют отдельные корпуса модулей), вырезанной из листового материала на лазерном станке. При сборке контроллера 11 к отверстиям платы, расположенным в ее углах, прикручиваются пластиковые стойки болтами с одной стороны, с другой, нижней стороне, запрессовываются магниты для последующего крепления контроллерного модуля к корпусу 1 робота.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНФИГУРИРУЕМЫЙ МОБИЛЬНЫЙ РОБОТ | 2023 |
|
RU2821375C1 |
| ЧРЕСКОСТНЫЙ АВТОМАТИЗИРОВАННЫЙ ДИСТРАКЦИОННЫЙ АППАРАТ И АВТОМАТИЧЕСКИЙ УЗЕЛ ПЕРЕМЕЩЕНИЯ | 2021 |
|
RU2763644C1 |
| Опорно-поворотное устройство | 2016 |
|
RU2634333C1 |
| ГУСЕНИЧНЫЙ СВАРОЧНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2019 |
|
RU2754728C1 |
| Цифровой обучающий комплекс для подготовки к перспективным профессиям в области нейрофизиологии | 2019 |
|
RU2698994C1 |
| Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов | 2024 |
|
RU2836085C1 |
| УЧЕБНЫЙ ПРИБОР | 2017 |
|
RU2663008C1 |
| Подвижная перегородка | 2021 |
|
RU2781787C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Спутник-конструктор - учебно-демонстрационная модель | 2017 |
|
RU2693722C2 |
Изобретение относится к области механики, а именно к конструкторам для образования, в частности к конструктору для сборки робота. Конструктор для сборки робота содержит корпус, контроллер, мотор-редуктор, соединенные с контроллером колесные валы, соединенные с мотором-редуктором колеса, закрепленные на колесных валах, и источник питания, располагаемый внутри корпуса и соединенный с контроллером, а также робот содержит съемные модули, которые крепятся к корпусу с помощью соединительных элементов, при этом корпус выполнен в виде металлического каркаса и жестко закрепленных на его нижней и верхней поверхностях полимерных пластин, при этом источник питания расположен внутри металлического каркаса, а мотор-редуктор и колесные валы расположены между полимерными пластинами по периметру корпуса, при этом соединительные элементы на корпусе представляют собой расположенные на поверхностях пластин магниты, а соединительные элементы на съемных модулях представляют собой металлические болты. Технический результат состоит в повышении прочности робота-конструктора при одновременном расширении его функциональных возможностей и удобства эксплуатации. 3 з.п. ф-лы, 2 ил. 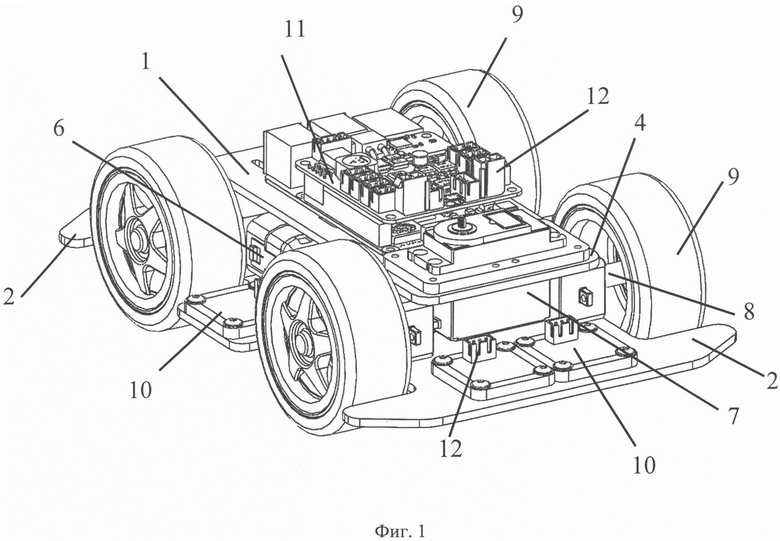
1. Конструктор для сборки робота, содержащий корпус, контроллер, мотор-редуктор, соединенные с контроллером колесные валы, соединенные с мотором-редуктором колеса, закрепленные на колесных валах, и источник питания, располагаемый внутри корпуса и соединенный с контроллером, а также робот содержит съемные модули, которые крепятся к корпусу с помощью соединительных элементов, отличающийся тем, что корпус выполнен в виде металлического каркаса и жестко закрепленных на его нижней и верхней поверхностях полимерных пластин, при этом источник питания расположен внутри металлического каркаса, а мотор-редуктор и колесные валы расположены между полимерными пластинами по периметру корпуса, при этом соединительные элементы на корпусе представляют собой расположенные на поверхностях пластин магниты, а соединительные элементы на съемных модулях представляют собой металлические болты.
2. Конструктор для сборки робота по п. 1, отличающийся тем, что металлический каркас выполнен из нержавеющей стали.
3. Конструктор для сборки робота по п. 1, отличающийся тем, что в металлическом каркасе выполнены резьбовые отверстия.
4. Конструктор для сборки робота по п. 1, отличающийся тем, что все полимерные пластины выполнены из ABS-пластика.
| 0 |
|
SU174140A1 | |
| 0 |
|
SU183006A1 | |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 2015012163 A1, 08.01.2015. | |||

