Изобретение относится к радиотехнике и может быть использовано для определения направления и частоты априорно неизвестных источников радиоизлучения (ИРИ).
Известен амплитудный способ пеленгования, основанный на приеме сигналов ИРИ двумя антеннами с общим центром раскрыва, фокальные оси которых сдвинуты одна относительно другой примерно на ширину диаграммы направленности (ДН), измерении амплитуд сигналов на выходах антенн и последующем их сравнении (см. А.И. Леонов, К.И. Фомичев. Моноимпульсная радиолокация. - М.: Сов. радио, 1984, с. 6, рис. 1.1а).
Недостатком аналога является низкая точность измерения пеленгов на ИРИ, обусловленная неидентичностью приемных каналов и зависимостью направленных свойств ДН антенной решетки от частоты.
Более высокой точностью измерения пространственных параметров сигнала обладает фазовый способ пеленгования, основанный на приеме сигналов ИРИ двумя антеннами, фокальные оси которых совпадают по направлению, а центры раскрыва разнесены в пространстве, с последующим измерением фазового сдвига между принятыми сигналами на выходах антенн (см. А.И. Леонов, К.И. Фомичев. Моноимпульсная радиолокация. - М.: Сов. радио, 1984, с. 6, рис. 1.1б).
Недостатком этого аналога, ограничивающим его применение, является неоднозначность результатов пеленгования в широком (1-18 ГГц) частотном диапазоне. При устранении этого недостатка за счет увеличения числа антенн и приемных каналов существенно возрастают габариты и стоимость измерителя. Кроме того, аналогу присущи ограниченные функциональные возможности. Последние обусловлены, например, тем, что в нем не предусмотрено измерение значения текущей частоты ИРИ.
Известен "Способ адаптивного измерения пространственных параметров ИРИ и устройство для его осуществления" по Пат. РФ №2423719, МПК G01S 3/14, опубл. 10.07.2011 г., бюл. №19. Способ включает прием радиосигналов антенной решеткой, преобразование принятых радиосигналов в цифровую форму, вычисление из эталонных разностей фаз с учетом измеренной девиации пеленгатора соответствующих измеренных разностей фаз, возведение в квадрат полученных значений невязок, их суммирование и определение наиболее вероятного направления прихода радиосигнала.
Способ обладает более высокой точностью измерения пространственных параметров сигналов за счет выполнения на подготовительном этапе операции обноски радиопеленгатора. Однако способ обладает недостаточной точностью измерений в силу ряда причин: в связи с тем что обноску пеленгатора выполняют относительно редко в силу значительных временных затрат на ее выполнение, а в ряде случаев отсутствия таких возможностей, ограниченной стабильностью опорных генераторов приемных трактов, влияния климатических и температурных изменений, изменений окружающей среды, подстилающей поверхности и др.
Наиболее близким по технической сущности к заявленному является "Способ автоматизированного контроля источников радиоизлучений" по Пат. РФ №2260814, МПК G01S 3/02, опубл. 20.05.2005 г., бюл. №26. Прототип включает прием сигнала источника радиоизлучения двумя антеннами, фокальные оси которых сдвинуты одна относительно другой в плоскости пеленгования примерно на ширину диаграммы направленности d, в 5…10 раз превышающую длину волны контролируемого сигнала, измерение несущей частоты ƒn и разности фаз Δϕ принятых сигналов и грубую оценку пеленга θ источника радиоизлучения путем вычисления отношения разности амплитуд принятых сигналов к их сумме, вычисление нескольких значений пеленга на ИРИ по измеренной разности фаз по формуле

где n=0,±1,±2,…,k - целое число, сравнение их с грубой оценкой пеленга, выбор пеленга из вычисленных по разности фаз Δϕ наиболее близкого к определенному по отношению разности амплитуд к их сумме, принятие его в качестве пеленга на ИРИ, при этом значение k выбирают из условия, чтобы значение θ по модулю не превышало углового сдвига между фокальными осями антенн.
Прототип обеспечивает повышение точности измерения пеленга на ИРИ и расширение рабочего диапазона частот благодаря использованию в обработке амплитудных, частотных и фазовых параметров сигналов.
Однако способу-прототипу присущ недостаток, связанный с недостаточной точностью измерения пеленгов на ИРИ.
Целью заявляемого способа автоматизированного контроля ИРИ является повышение точности измерения пеленгов в условиях воздействия внешних дестабилизирующих факторов, приводящих к флуктуациям амплитудно-фазовых характеристик приемных трактов.
Поставленная цель достигается тем, что в известном способе автоматизированного контроля источников радиоизлучений, состоящем в том, что принимают радиосигналы двумя идентичными радиоприемными модулями (РПМ) с антеннами, фазовые центры которых разнесены в плоскости пеленгования на расстояние, в 5…10 раз превосходящее длину волны контролируемых сигналов, измеряют их несущую частоту ƒn, разность фаз Δϕ и амплитуд  , принятых первым и вторым РПМ, на подготовительном этапе поочередно определяют комплексные эталонные коэффициенты
, принятых первым и вторым РПМ, на подготовительном этапе поочередно определяют комплексные эталонные коэффициенты  и
и  для первого и второго РПМ, полученные в результате определения девиации измерителя, где n=1,2,…,N, N - число анализируемых калибровочных поддиапазонов частот из диапазона ΔF=ƒ1,ƒ2,…,ƒn,…,ƒN, k=1,2,…,K, К - число анализируемых пространственных углов из сектора обзора θ=θ1,θ2,…,θk,…,θК, и комплексные калибровочные коэффициенты
для первого и второго РПМ, полученные в результате определения девиации измерителя, где n=1,2,…,N, N - число анализируемых калибровочных поддиапазонов частот из диапазона ΔF=ƒ1,ƒ2,…,ƒn,…,ƒN, k=1,2,…,K, К - число анализируемых пространственных углов из сектора обзора θ=θ1,θ2,…,θk,…,θК, и комплексные калибровочные коэффициенты  и
и  , n=1,2,…,N, полученные подключением генератора шума непосредственно на входы обеих РПМ и отражающие неидентичность их амплитудно-фазовых характеристик на момент измерения комплексных эталонных коэффициентов и , формируют матрицу эталонных коэффициентов QKN размерности K×N, элементами которой является совокупность соответствующих коэффициентов
, n=1,2,…,N, полученные подключением генератора шума непосредственно на входы обеих РПМ и отражающие неидентичность их амплитудно-фазовых характеристик на момент измерения комплексных эталонных коэффициентов и , формируют матрицу эталонных коэффициентов QKN размерности K×N, элементами которой является совокупность соответствующих коэффициентов  , а в процессе работы после обнаружения излучения в n-ном поддиапазоне рабочих частот Δƒn измеряют текущее значение калибровочных коэффициентов
, а в процессе работы после обнаружения излучения в n-ном поддиапазоне рабочих частот Δƒn измеряют текущее значение калибровочных коэффициентов  и
и  с подключением для этого генератора шума на входы обоих РПМ, принимают пеленгуемый сигнал ИРИ с помощью обоих РПМ, преобразуют принятый сигнал в цифровую форму
с подключением для этого генератора шума на входы обоих РПМ, принимают пеленгуемый сигнал ИРИ с помощью обоих РПМ, преобразуют принятый сигнал в цифровую форму  и
и  , определяют несущую частоту сигнала ƒn и разности фаз
, определяют несущую частоту сигнала ƒn и разности фаз  и амплитуд сигнала, принятого первым и вторым РПМ в одни и те же моменты времени, учитывают неидентичность амплитудно-фазовых характеристик РПМ в соответствии с выражением:
и амплитуд сигнала, принятого первым и вторым РПМ в одни и те же моменты времени, учитывают неидентичность амплитудно-фазовых характеристик РПМ в соответствии с выражением:

где  - откалиброванный вектор разности фаз пеленгуемого сигнала,
- откалиброванный вектор разности фаз пеленгуемого сигнала,  , * - операция комплексно-сопряженного умножения,
, * - операция комплексно-сопряженного умножения,  , рассчитывают нормированную функцию пространственного распределения амплитуды сигнала в секторе углов θ для n-ого поддиапазона Δƒn рабочих частот
, рассчитывают нормированную функцию пространственного распределения амплитуды сигнала в секторе углов θ для n-ого поддиапазона Δƒn рабочих частот  с использованием соответствующих элементов матрицы эталонных коэффициентов QKN и нормированную функцию пространственного распределения фазы сигнала
с использованием соответствующих элементов матрицы эталонных коэффициентов QKN и нормированную функцию пространственного распределения фазы сигнала  , а в качестве измеренного пеленга принимают значение, соответствующее максимальной сумме пространственных распределений амплитуды и фазы оцениваемого сигнала:
, а в качестве измеренного пеленга принимают значение, соответствующее максимальной сумме пространственных распределений амплитуды и фазы оцениваемого сигнала:

При этом нормированную функцию пространственного распределения амплитуды сигнала в секторе θ для n-ого частотного поддиапазона Δƒn рассчитывают в соответствии с выражением:

где  , k=1,2,…,K, An={A1n,A2n,…,Akn,…AKn} - вектор эталонных разностей амплитуд в секторе углов θ для n-ого поддиапазона частот Δƒn,
, k=1,2,…,K, An={A1n,A2n,…,Akn,…AKn} - вектор эталонных разностей амплитуд в секторе углов θ для n-ого поддиапазона частот Δƒn,  ,
,  - амплитуды соответственно первого и второго комплексных сигналов и на выходах первого и второго РПМ, полученные на подготовительном этапе.
- амплитуды соответственно первого и второго комплексных сигналов и на выходах первого и второго РПМ, полученные на подготовительном этапе.
Нормированную функцию пространственного распределения фазы сигнала FPn(k) рассчитывают следующим образом:

где  - вектор эталонных разностей фаз сигнала в секторе углов θ для n-ого поддиапазона частот Δƒn, полученные на подготовительном этапе,
- вектор эталонных разностей фаз сигнала в секторе углов θ для n-ого поддиапазона частот Δƒn, полученные на подготовительном этапе,  .
.
Благодаря новой совокупности существенных признаков в заявляемом способе за счет использования в процессе принятия решения совместного пространственного распределения амплитуды и фазы оцениваемого сигнала достигается повышение точности измерения пеленга на ИРИ в условиях воздействия внешних дестабилизирующих факторов. Кроме того, повышение точностных характеристик способа обеспечивают за счет учета изменений в неидентичности трактов приема сигналов в РПМ в моменты выполнения обноски измерителя по сравнению со временем проведения измерений пеленга на ИРИ (коррекция результатов обноски).
Заявляемый объект поясняется чертежами, на которых показаны:
на фиг. 1 - обобщенный алгоритм автоматизированного контроля источников радиоизлучений;
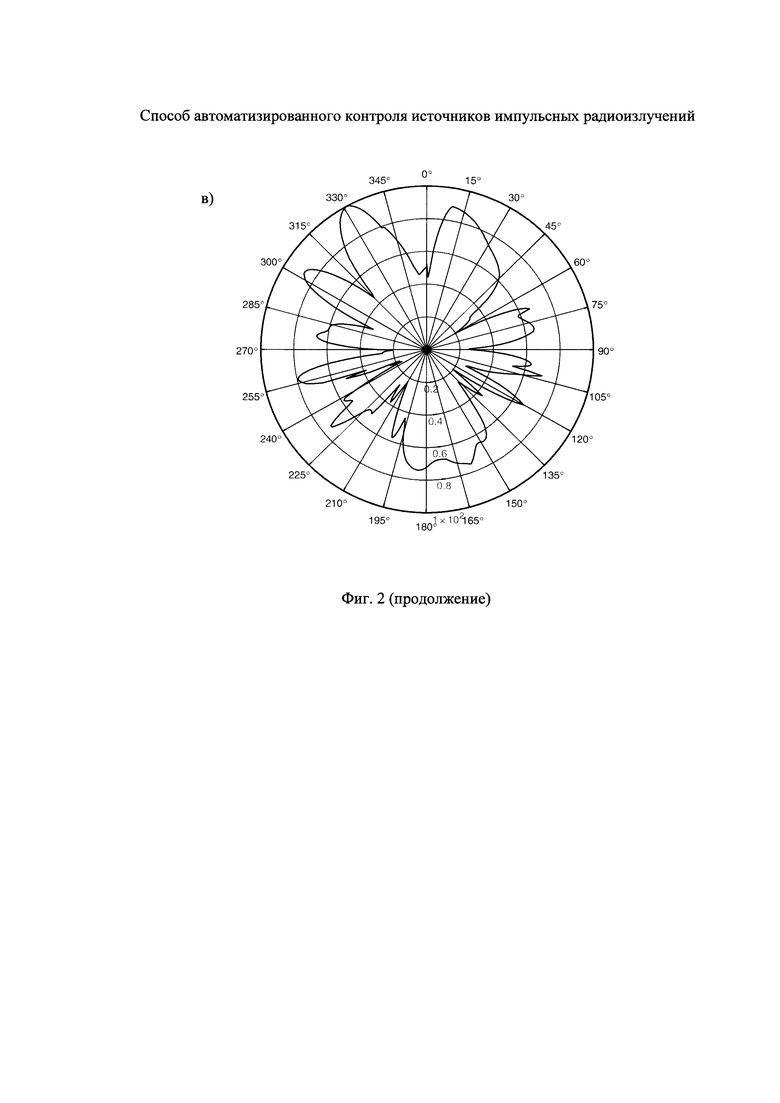
на фиг. 2 - пространственное распределение параметров сигнала в секторе θ=180° при использовании заявляемого способа:
а) нормированной функции пространственного распределения амплитуды сигнала  ;
;
б) нормированной функции пространственного распределения фазы сигнала  ;
;
в) суммарное распределение параметров сигнала;
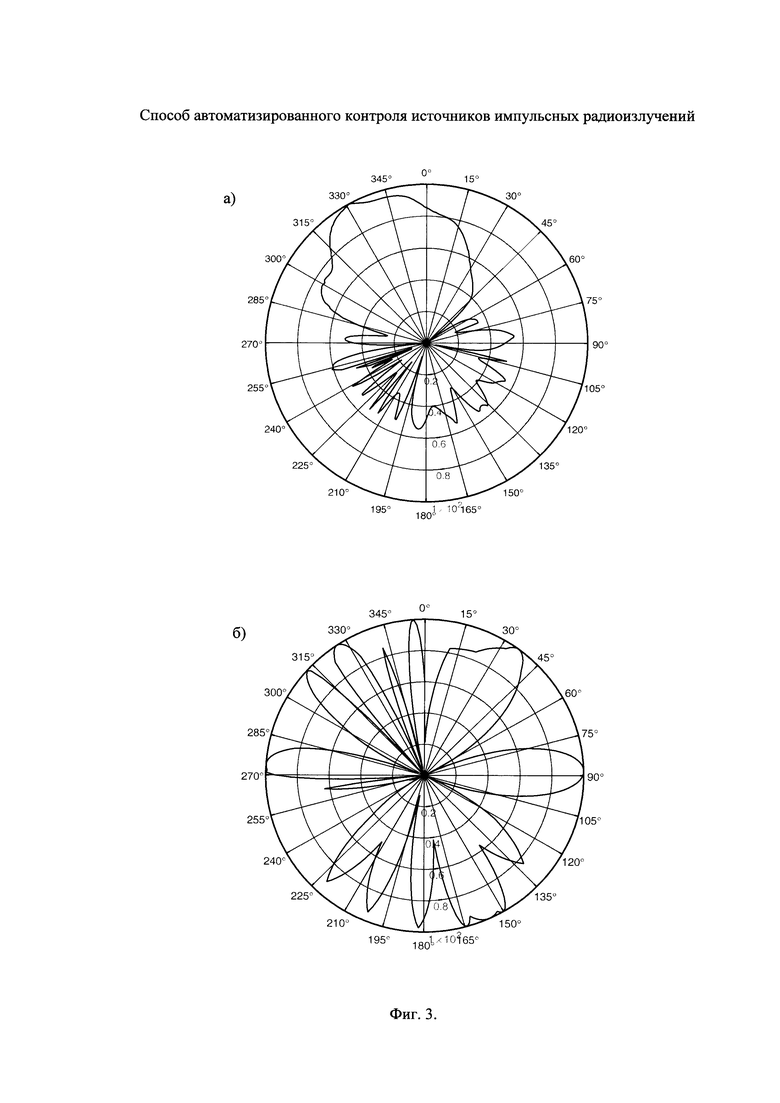
на фиг. 3 - пространственное распределение параметров сигнала при использовании способа-прототипа:
а) нормированной функции пространственного распределения амплитуды сигнала ;
б) нормированной функции пространственного распределения фазы сигнала ;
в) суммарное распределение параметров сигнала;
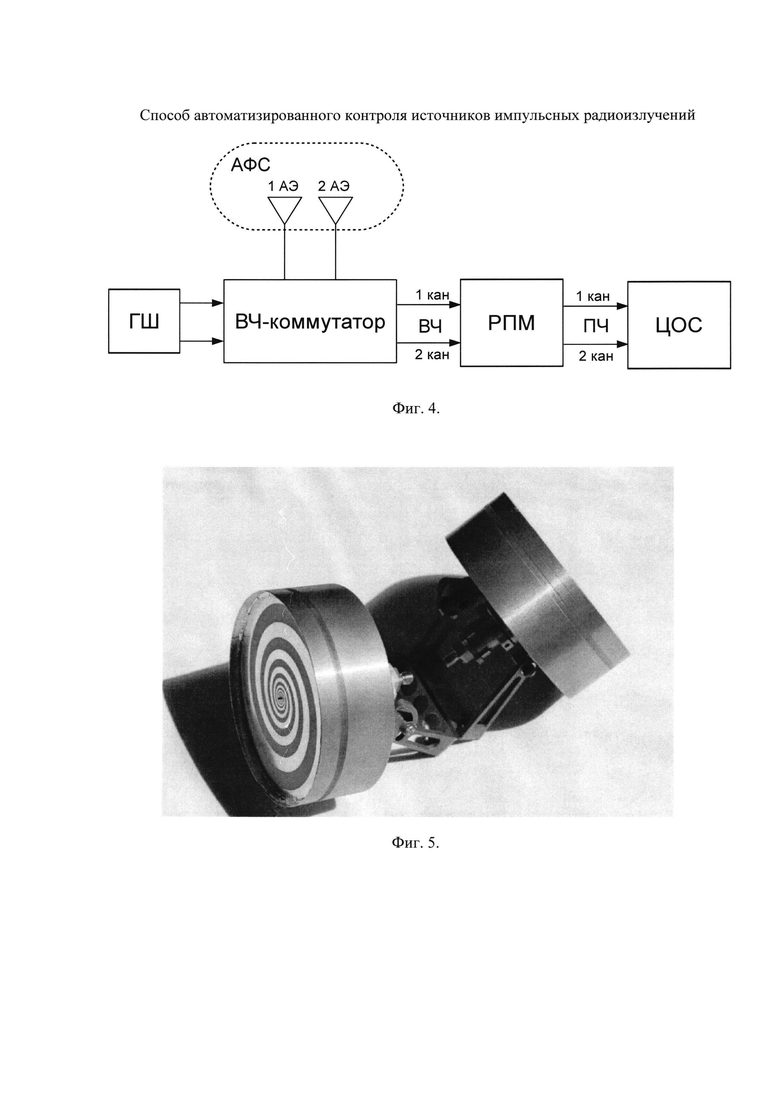
на фиг. 4 - обобщенная структурная схема устройства автоматизированного контроля источников радиоизлучений;
на фиг. 5 - внешний вид антенных элементов.
Сущность изобретения состоит в следующем. В настоящее время наблюдается устойчивая тенденция по расширению диапазона рабочих частот пеленгаторов, например 1-18 ГГц. В этих условиях достижение идентичности амплитудно-фазовых характеристик трактов приема пеленгаторов представляет большую проблему (см. Радиомониторинг - задачи, методы, средства / Под ред. А.М. Рембовского. 2-е изд., перераб. и доп. - М.: Горячая линия - Телеком, 2010. - 624 с.). В настоящее время известен ряд подходов к решению данной проблемы. Это "обноска" (снятие девиации) пеленгатора, калибровка трактов приема сигналов (см. Кукес И.С., Старик М.Е. Основы радиопеленгации. - М.: Сов. радио, 1964, с. 536-537). В предлагаемом способе также выполняют снятие девиации пеленгатора и одновременно фиксируют степень неидентичности трактов приема. Это необходимо в связи с тем, что через незначительный интервал времени под воздействием дестабилизирующих факторов, например температуры окружающей среды, неидентичность трактов приема претерпевает изменения. Практические испытания показали, что это явление типично для верхней части диапазона частот. Вследствие этого результаты "обноски", выполненной на подготовительном этапе, не соответствуют действительности. Последнее приводит к систематическим ошибкам в оценивании пространственных параметров, значение которых на интервале времени претерпевает изменение (не подлежит измерению и учету). Поэтому предлагается повторное (перед каждым измерением пеленга на ИРИ) проведение оценки степени неидентичности трактов приема. После этого определяют произошедшие в трактах приема изменения (по сравнению с подготовительным этапом) и их пересчет в суммарный результат оценки пеленга на ИРИ.
Кроме того, в способе-прототипе для оценки пеленга используется несколько значений амплитуды и разностей фаз сигнала (учитывают несколько дискретных точек для получения пеленгов). В предлагаемом способе рассчитывают нормированные функции пространственного распределения амплитуды и разности фаз сигнала в заданном секторе (непрерывные функции), а решение о значении пеленга принимают с учетом их взаимного распределения. В результате используют максимальную статистику параметров принятого сигнала ИРИ для оценивания его пеленга.
Предлагаемый способ реализуют следующим образом. Рабочий диапазон частот ΔF, например 1-18 ГГц, делят на N поддиапазонов Δƒn, n=1,2,…,N. Значение Δƒn выбирают исходя из поставленных требований, оно может составлять, например 200 МГц. В качестве частоты калибровки определяют центральную частоту каждого n-го поддиапазона ƒn.
На подготовительном этапе (см. фиг. 1) в результате обноски, желательно выполняемой в безэховой камере, последовательно рассчитывают эталонные коэффициенты  и
и  для первого и второго РПМ, где n=1,2,…,N, N - число анализируемых калибровочных поддиапазонов частот Δƒn из диапазона ΔF=ƒ1,ƒ2,…,ƒn,…,ƒN, k=1,2,…,K, K - число анализируемых пространственных углов из сектора обзора θ=θ1,θ2,…,θk,…,θK. Значения и представляют собой комплексные сигналы:
для первого и второго РПМ, где n=1,2,…,N, N - число анализируемых калибровочных поддиапазонов частот Δƒn из диапазона ΔF=ƒ1,ƒ2,…,ƒn,…,ƒN, k=1,2,…,K, K - число анализируемых пространственных углов из сектора обзора θ=θ1,θ2,…,θk,…,θK. Значения и представляют собой комплексные сигналы:  ,
,  , полученные на выходах первого и второго РПМ соответственно от эталонного источника излучения при k-м азимуте и на n-й калибровочной частоте.
, полученные на выходах первого и второго РПМ соответственно от эталонного источника излучения при k-м азимуте и на n-й калибровочной частоте.
Поочередно с эталонными коэффициентами и измеряют калибровочные коэффициенты  и
и  , полученные подключением генератора шума непосредственно на входы обоих РПМ (см. фиг. 5). Последние отражают неидентичность их амплитудно-фазовых характеристик на момент измерения комплексных эталонных коэффициентов. Здесь
, полученные подключением генератора шума непосредственно на входы обоих РПМ (см. фиг. 5). Последние отражают неидентичность их амплитудно-фазовых характеристик на момент измерения комплексных эталонных коэффициентов. Здесь  и
и  представляют собой комплексные сигналы на выходах первого и второго РПМ, полученные от генератора шума при k-м азимуте и на n-й калибровочной частоте.
представляют собой комплексные сигналы на выходах первого и второго РПМ, полученные от генератора шума при k-м азимуте и на n-й калибровочной частоте.
На основе полученных данных формируют матрицу эталонных коэффициентов QKN размерности K×N, элементами которой является совокупность соответствующих коэффициентов  .
.
В процессе работы после обнаружения излучения в n-ном поддиапазоне рабочих частот Δƒn измеряют текущее значение калибровочных коэффициентов  и
и  путем подключения для этого генератора шума на входы обоих РПМ. После этого принимают обнаруженный сигнал ИРИ с помощью обоих РПМ, преобразуют принятый сигнал в цифровую форму
путем подключения для этого генератора шума на входы обоих РПМ. После этого принимают обнаруженный сигнал ИРИ с помощью обоих РПМ, преобразуют принятый сигнал в цифровую форму  и
и  , определяют его несущую частоту ƒn, а также разности фаз
, определяют его несущую частоту ƒn, а также разности фаз  и амплитуд
и амплитуд  сигнала в одни и те же моменты времени. Последние находят на основе выражений:
сигнала в одни и те же моменты времени. Последние находят на основе выражений:


где * - операция комплексно-сопряженного умножения.
Далее устраняют неидентичность амплитудно-фазовых характеристик приемных трактов с использованием выражения:

где  - откалиброванный вектор разности фаз пеленгуемого сигнала,
- откалиброванный вектор разности фаз пеленгуемого сигнала,

На следующем этапе рассчитывают нормированную функцию пространственного распределения амплитуды сигнала в секторе углов θ для n-ого поддиапазона Δƒn рабочих частот  с использованием значений соответствующих элементов матрицы эталонных коэффициентов QKN
с использованием значений соответствующих элементов матрицы эталонных коэффициентов QKN

и нормированную функцию пространственного распределения фаз

где  , k=1,2,…,К, An={A1n,A2n,…,Akn,…AKn} - вектор эталонных разностей амплитуд в секторе углов θ для n-ого поддиапазона частот Δƒn,
, k=1,2,…,К, An={A1n,A2n,…,Akn,…AKn} - вектор эталонных разностей амплитуд в секторе углов θ для n-ого поддиапазона частот Δƒn,  - амплитуда комплексного сигнала
- амплитуда комплексного сигнала  ,
,  - амплитуда комплексного сигнала
- амплитуда комплексного сигнала  ,
,  - вектор эталонных разностей фаз сигнала в секторе углов θ для n-ого поддиапазона частот Δƒn,
- вектор эталонных разностей фаз сигнала в секторе углов θ для n-ого поддиапазона частот Δƒn,  .
.
После завершения названных операций, учитывающих текущую неидентичность приемных (пеленгаторных) трактов и результаты эталонных описаний, приступают к оцениванию пеленга на ИРИ в соответствии с выражением:

Таким образом, решение о значении пеленга θk принимают по максимальной сумме пространственных распределений: амплитуды и фазы сигнала. Последнее соответствует наиболее вероятному направлению на ИРИ.
В рамках представленных материалов выполнено моделирование и сравнительная оценка предложенного способа автоматизированного контроля ИРИ (см. фиг. 2) и способа-прототипа (фиг. 3). При этом характеристики прототипа несколько завышены в связи с тем, что в нем так же, как и в предложенном способе, дополнительно выполнен расчет пространственных функций  и
и  , а решение принималось в соответствии с (7). Отличие состоит лишь в том, что не осуществлялась корректировка калибровочных коэффициентов Δgkn, входящих в состав вектора эталонных разностей фаз Pn.
, а решение принималось в соответствии с (7). Отличие состоит лишь в том, что не осуществлялась корректировка калибровочных коэффициентов Δgkn, входящих в состав вектора эталонных разностей фаз Pn.
На фиг. 2 представлены распределения амплитуды и фазы сигнала в зависимости от направления его прихода (фиг. 2а и 2б соответственно), а также их суммарное распределение (фиг. 2в) для частоты 1900 МГц. При этом сигнал ИРИ поступал с направления 331°. На амплитудном распределении виден один главный максимум в направлении источника. Однако он достаточно широк, что влечет за собой большие ошибки в определении θk (порядка 15°). Для более точного определения θk получено фазовое распределение с большим числом узконаправленных максимумов (фиг. 2б). Суммарное их распределение (фиг. 2в) дает один максимум в направлении 331°.
На фиг. 3а, б и в приведены диаграммы, характеризующие способ-прототип для рассмотренных условий (без уточнения калибровочных коэффициентов  и
и  ). Из их рассмотрения следует, что на фазовом распределении (фиг. 3б) имеется несколько узконаправленных максимумов, но все они сдвинуты относительного истинного направления на ИРИ. В результате в суммарном распределении (фиг. 3в) максимум оказался в направлении 353°, т.е. ошибка составила 22° из-за ухода фазы под воздействием дестабилизирующих факторов на измеритель. Однако оцениваемая точность прототипа еще ниже приведенной из-за частичного (дискретного) измерения Δϕ.
). Из их рассмотрения следует, что на фазовом распределении (фиг. 3б) имеется несколько узконаправленных максимумов, но все они сдвинуты относительного истинного направления на ИРИ. В результате в суммарном распределении (фиг. 3в) максимум оказался в направлении 353°, т.е. ошибка составила 22° из-за ухода фазы под воздействием дестабилизирующих факторов на измеритель. Однако оцениваемая точность прототипа еще ниже приведенной из-за частичного (дискретного) измерения Δϕ.
Таким образом, в предлагаемом способе дополнительно выполняют операцию по сравнению результатов калибровки приемных каналов в момент измерений анализируемого сигнала с результатами, полученными на подготовительном этапе при обноске измерителя. В результате стало возможным скорректировать результаты обноски с учетом воздействия дестабилизирующих факторов на РПМ, например температуры окружающей среды. Кроме того, расчет коэффициентов пространственного распределения амплитуды и фазы сигнала позволил более полно использовать его статистические характеристики.
На фиг. 4 приведена обобщенная структурная схема устройства автоматизированного контроля ИРИ в соответствии с заявляемым способом. Устройство содержит последовательно соединенные антенно-фидерную систему (АФС) из двух антенных элементов, коммутатор, двухканальный радиоприемный модуль и блок цифровой обработки сигналов, генератор шума, выходы которого подключены ко второй группе входов коммутатора.
На подготовительном этапе с помощью коммутатора на входы двухканального РПМ поочередно поступают сигналы от АФС и генератора шума. Последние принимаются в РПМ и далее поступают в блок цифровой обработки сигналов (ЦОС). Здесь их преобразуют в цифровую форму и формируют эталонные  и
и  и калибровочные
и калибровочные  и
и  коэффициенты. На их основе в блоке ЦОС формируют матрицу QKN размерности K×N.
коэффициенты. На их основе в блоке ЦОС формируют матрицу QKN размерности K×N.
В процессе работы с помощью АФС и РПМ на интервале времени Δt принимают анализируемый сигнал, который далее поступает в блок ЦОС. После этого на вход РПМ подключают генератор шума с помощью коммутатора. Интервал Δt выбирают из условия минимально необходимого времени для измерения коэффициентов  . Далее в соответствии с выражениями (1)-(7) в блоке ЦОС определяют пеленг на ИРИ.
. Далее в соответствии с выражениями (1)-(7) в блоке ЦОС определяют пеленг на ИРИ.
Реализация устройства известна и трудностей не вызывает. В качестве антенных элементов могут быть использованы спиральные антенны (см. Антенны измерительные АС 8.33.1 - АС 8.33.2, ОАО "НПЦ СКАРД", Россия). Внешний вид антенн приведен на фиг. 5.
Радиоприемный модуль может быть реализован по известной схеме (см. М.Н. Воропай, С.В. Иванов. Синтез структуры и реализация широкополосного радиоприемного устройства в диапазоне рабочих частот 0,02…18 ГГц для комплексов радиомониторинга // ИВД 2010, №2, с. 108-120).
Измерение несущей частоты ƒn, разности фаз Δϕ и амплитуд  (блок ЦОС) осуществляют с помощью быстрого преобразования Фурье с функциональной обработкой входных сигналов на программируемых логических интегральных схемах семейства Virtex-5 фирмы Xilinx, сигнальном процессоре TMS320C6455. На этих же элементах выполняют вычисления
(блок ЦОС) осуществляют с помощью быстрого преобразования Фурье с функциональной обработкой входных сигналов на программируемых логических интегральных схемах семейства Virtex-5 фирмы Xilinx, сигнальном процессоре TMS320C6455. На этих же элементах выполняют вычисления  и θk.
и θk.
Реализация генератора шума известна. Наиболее распространенным является подход с использованием серийных шумовых генераторов на лавинно-пролетных диодах (см. Ю.И. Алексеев, А.В. Демьяненко, И.В. Семерник. Генератор хаотических колебаний на лавинно-пролетном диоде // Изв. вузов. Физика, 2012. Т. 55, №8/3. С. 205-206).
Реализация коммутатора известна (см. Модули коммутаторов СВЧ сигнала от Mini Circuits. Электронный ресурс: http://www.vital-ic.ru).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2014 |
|
RU2556699C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГАЦИОННОЙ ПАНОРАМЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2528177C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2603356C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2380719C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |



Изобретение относится к радиотехнике и может быть использовано для определения пеленга и частоты источника радиоизлучения в системах радиоконтроля. Техническим результатом является повышение точности пеленгования в условиях воздействия внешних дестабилизирующих факторов. Указанный результат достигается благодаря выполнению операции сравнения результатов калибровки трактов приема в момент измерения пеленга анализируемого сигнала с результатами калибровки, полученными на подготовительном этапе при определении девиации измерителя, что позволяет скорректировать результаты калибровки с учетом воздействия дестабилизирующих факторов, при этом расчет коэффициентов пространственного распределения амплитуды и фазы сигнала с учетом их взаимного распределения обеспечивает использование статистических характеристик для повышения точности измерения пеленга. 2 з.п. ф-лы, 5 ил.
1. Способ автоматизированного контроля источников радиоизлучений (ИРИ), включающий прием радиосигналов двумя идентичными радиоприемными модулями (РПМ) с антеннами, фазовые центры которых разнесены в плоскости пеленгования на расстояние, в 5…10 раз превышающее длину волны контролируемых сигналов, измерение их несущей частоты ƒn, разности фаз Δϕ и амплитуд  , принятых первым и вторым РПМ, отличающийся тем, что дополнительно на подготовительном этапе поочередно определяют комплексные эталонные коэффициенты
, принятых первым и вторым РПМ, отличающийся тем, что дополнительно на подготовительном этапе поочередно определяют комплексные эталонные коэффициенты  и
и  для первого и второго РПМ, полученные в результате определения девиации измерителя, где n=1, 2, …, N, N - число анализируемых калибровочных поддиапазонов частот из диапазона ΔF=ƒ1, ƒ2, …, ƒn, …, ƒN, k=1, 2, …, K, K - число анализируемых пространственных углов из сектора обзора θ=θ1, θ2, …, θk, …, θK, и комплексные калибровочные коэффициенты
для первого и второго РПМ, полученные в результате определения девиации измерителя, где n=1, 2, …, N, N - число анализируемых калибровочных поддиапазонов частот из диапазона ΔF=ƒ1, ƒ2, …, ƒn, …, ƒN, k=1, 2, …, K, K - число анализируемых пространственных углов из сектора обзора θ=θ1, θ2, …, θk, …, θK, и комплексные калибровочные коэффициенты  и
и  , n=1, 2, …, N, полученные подключением генератора шума непосредственно на входы обеих РПМ и отражающие неидентичность их амплитудно-фазовых характеристик на момент измерения комплексных эталонных коэффициентов
, n=1, 2, …, N, полученные подключением генератора шума непосредственно на входы обеих РПМ и отражающие неидентичность их амплитудно-фазовых характеристик на момент измерения комплексных эталонных коэффициентов  и
и  , формируют матрицу эталонных коэффициентов QKN размерности K×N, элементами которой является совокупность соответствующих коэффициентов
, формируют матрицу эталонных коэффициентов QKN размерности K×N, элементами которой является совокупность соответствующих коэффициентов 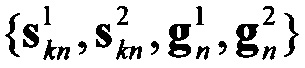 , а в процессе работы после обнаружения излучения в n-ном поддиапазоне рабочих частот Δƒn измеряют текущее значение калибровочных коэффициентов
, а в процессе работы после обнаружения излучения в n-ном поддиапазоне рабочих частот Δƒn измеряют текущее значение калибровочных коэффициентов  и
и  с подключением для этого генератора шума на входы обоих РПМ, принимают пеленгуемый сигнал ИРИ с помощью двух РПМ, преобразуют принятый сигнал в цифровую форму
с подключением для этого генератора шума на входы обоих РПМ, принимают пеленгуемый сигнал ИРИ с помощью двух РПМ, преобразуют принятый сигнал в цифровую форму  и
и  , определяют несущую частоту сигнала ƒn, разности фаз
, определяют несущую частоту сигнала ƒn, разности фаз  и амплитуд
и амплитуд  сигнала, принятого первым и вторым РПМ в одни и те же моменты времени, учитывают неидентичность амплитудно-фазовых характеристик РПМ в соответствии с выражением:
сигнала, принятого первым и вторым РПМ в одни и те же моменты времени, учитывают неидентичность амплитудно-фазовых характеристик РПМ в соответствии с выражением:
 ,
,
где  - откалиброванный вектор разности фаз пеленгуемого сигнала,
- откалиброванный вектор разности фаз пеленгуемого сигнала,  ,
,
* - операция комплексно-сопряженного умножения,  , рассчитывают нормированную функцию пространственного распределения амплитуды сигнала в секторе углов θ для n-ого поддиапазона Δƒn рабочих частот
, рассчитывают нормированную функцию пространственного распределения амплитуды сигнала в секторе углов θ для n-ого поддиапазона Δƒn рабочих частот  с использованием соответствующих элементов матрицы эталонных коэффициентов QKN и нормированную функцию пространственного распределения фазы сигнала
с использованием соответствующих элементов матрицы эталонных коэффициентов QKN и нормированную функцию пространственного распределения фазы сигнала  , а в качестве измеренного пеленга принимают значение, соответствующее максимальной сумме пространственных распределений амплитуды и фазы оцениваемого сигнала:
, а в качестве измеренного пеленга принимают значение, соответствующее максимальной сумме пространственных распределений амплитуды и фазы оцениваемого сигнала:
 .
.
2. Способ по п. 1, отличающийся тем, что нормированную функцию пространственного распределения амплитуды сигнала в секторе θ для n-ого частотного поддиапазона Δƒn рассчитывают в соответствии с выражением:
 ,
,
где  , k=1, 2, …, K, An={A1n, A2n, …, Akn, … AKn} - вектор эталонных разностей амплитуд в секторе углов θ для n-ого поддиапазона частот Δƒn,
, k=1, 2, …, K, An={A1n, A2n, …, Akn, … AKn} - вектор эталонных разностей амплитуд в секторе углов θ для n-ого поддиапазона частот Δƒn,  ,
,  ,
,  - амплитуды соответственно первого и второго комплексных сигналов
- амплитуды соответственно первого и второго комплексных сигналов  и
и  на выходах первого и второго РПМ, полученные на подготовительном этапе.
на выходах первого и второго РПМ, полученные на подготовительном этапе.
3. Способ по п. 1, отличающийся тем, что нормированную функцию пространственного распределения фазы сигнала рассчитывают в соответствии с выражением:
 ,
,
где  - вектор эталонных разностей фаз сигнала в секторе углов θ для n-ого поддиапазона частот Δƒn, полученных на подготовительном этапе,
- вектор эталонных разностей фаз сигнала в секторе углов θ для n-ого поддиапазона частот Δƒn, полученных на подготовительном этапе,  ,
,  ,
,  .
.
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2004 |
|
RU2260814C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА ОВЧ И УВЧ ДИАПАЗОНОВ "КУНИЦА" | 2007 |
|
RU2340914C1 |
| Способ изготовления синтетических олиф для печатных красок посредством обработки сланцевых масел | 1952 |
|
SU95204A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| CN 205333850 U, 22.06.2016 | |||
| JP 2010034797 A, 12.02.2010 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТВЕРДОГО БЕЗВОДНОГО МЕТИЛОЛГИДАНТОИНА | 1993 |
|
RU2105760C1 |

