Изобретение относится к радиотехнике и может быть использовано для определения координат источников радиоизлучений (ИРИ), в частности для определения координат ИРИ при амплитудно-фазовой пеленгации с борта летательного аппарата (ЛА).
Определение координат ИРИ является важным составным элементом мониторинга сигналов. Достоинством пеленгации в системе местоопределения (МО) ИРИ является скрытность при определении координат вследствие отсутствия активного излучения. Размещение пеленгационных средств на ЛА и в том числе на беспилотных ЛА [1] позволяет существенно расширить зону мониторинга и осуществлять превентивное обнаружение и определение координат ИРИ.
Известен способ определения координат ИРИ, основанный на процессе пеленгования, описанном в патенте RU №2192651 [2]. Способ включает прием сигнала элементами линейной эквидистантной антенной решетки (ЛЭАР), дополнительный прием этого сигнала элементами второй ЛЭАР, расположенной перпендикулярно относительно первой ЛЭАР, и нелинейную обработку сигнала, в ходе которой вычисляют комплексно-сопряженный пространственный спектр Фурье пеленгуемого сигнала, принятого элементами первой и второй ЛЭАР, преобразовывают масштабы обоих вычисленных пространственных спектров по логарифмическому закону, производят корреляционный анализ и измерение относительного сдвига преобразованных пространственных спектров и оценивают угловую координату источника сигнала в соответствии с выражением θ=arctg(expΔ), где Δ - измеренный относительный сдвиг преобразованных пространственных спектров пеленгуемого сигнала. Координаты ИРИ определяются по двум-трем полученным пеленгам. Известный способ позволяет обеспечить возможность пеленгования источника любого априорно неизвестного сигнала.
Однако точность определения координат ИРИ при использовании известного способа бортовыми средствами ЛА низкая. Это объясняется тем, что возникает ошибка определения координат, связанная со случайными флуктуациями пространственного положения плоскости пеленгаторной антенны во время полета ЛА, причем величина этой ошибки соизмерима с систематическими и эксплуатационными ошибками самого пеленгатора. Недостатком известного способа является также то, что его узкая функциональная направленность не позволяет совмещать процесс местоопределения ИРИ с другими процессами радиомониторинга. Необходимые для реализации способа две ЛЭАР достаточно сложны при установке на ЛА, в особенности на малогабаритном беспилотном ЛА.
Известен способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА, используемый устройством по патенту RU №2275746 [3]. Способ включает прием радиосигналов бортовой антенной, частотную селекцию, определение пеленгов, регистрацию и обработку полученных данных. Координаты ИРИ фиксируются как точка пересечения, по крайней мере, двух линий пеленгов. Способ позволяет при его реализации совмещать процесс определения координат ИРИ с другими процессами радиомониторинга: параметрическим и семантическим контролем сигналов.
Но точность определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА известным способом низкая. Это объясняется в первую очередь возникновением ошибок, связанных со случайными флуктуациями пространственного положения плоскости пеленгаторной антенны во время полета ЛА. Величина этих ошибок соизмерима с систематическими и эксплуатационными ошибками используемых при реализации аппаратных средств.
Наиболее близким по технической сущности к заявляемому объекту является способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА, описанный в работе [4, с.18-22] (прототип). Способ включает прием радиосигналов бортовой антенной, частотную селекцию, определение линий пеленгов, регистрацию и весовую обработку полученных данных. Координаты ИРИ фиксируются как точка пересечения, по крайней мере, двух линий пеленгов. Пеленги на ИРИ измеряются во время полета последовательно по мере приближения к линии траверза и дальнейшего удаления от нее. Проведение весовой обработки результатов пеленгования позволяет уменьшить ошибки при фиксации координат ИРИ и за счет этого повысить точность.
Однако точность определения координат ИРИ при использовании известного способа недостаточна. Это объясняется возникновением ошибок, вызванных случайными флуктуациями пространственного положения плоскости пеленгаторной антенны в процессе полета ЛА.
Целью изобретения является повышение точности определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА.
Поставленная цель достигается за счет того, что в известный способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА, включающий прием радиосигналов бортовой пеленгаторной антенной, частотную селекцию, определение линий пеленгов, регистрацию и весовую обработку полученных данных, введены операции определения линий пеленгов в плоскости пеленгаторной антенны, формирования вспомогательных плоскостей, ортогональных плоскости пеленгаторной антенны и проходящих через каждую полученную линию пеленга, определения линий положения ИРИ как пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисления координат ИРИ как точки пересечения линий положения ИРИ.
Введение новых операций в известный способ определения координат ИРИ позволяет устранить неопределенность, связанную с отсутствием данных об угле места прихода волны, за счет чего уменьшается количество ошибок определения координат ИРИ и повышается точность отсчетов.
Сочетание отличительных признаков и свойства предлагаемого способа определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА из патентных источников не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
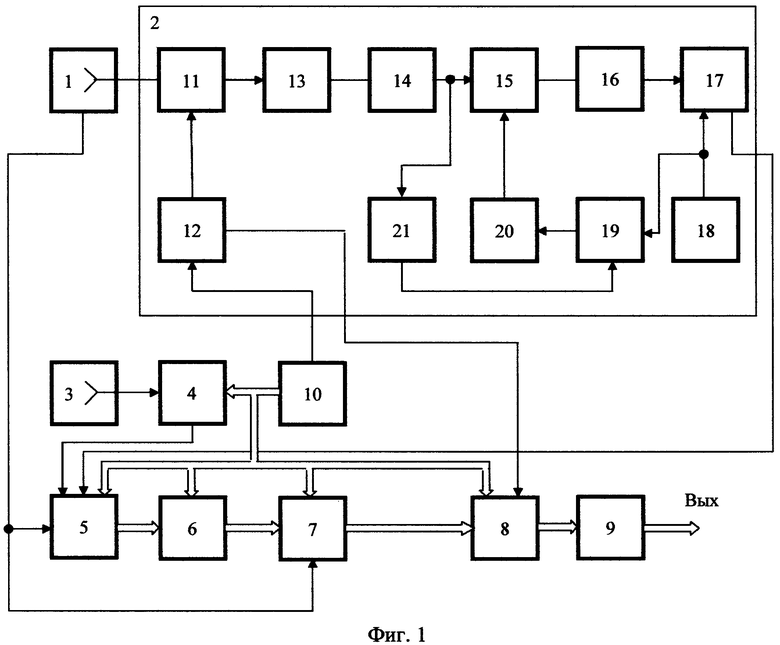
На фиг.1 приведена функциональная схема устройства определения координат ИРИ, реализующего предлагаемый способ;
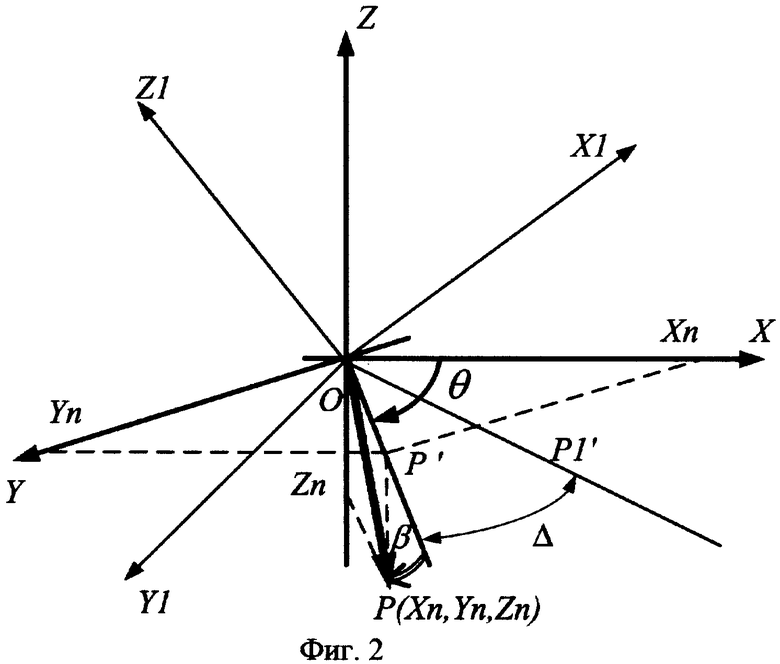
на фиг.2 - системы координат при пеленгации;
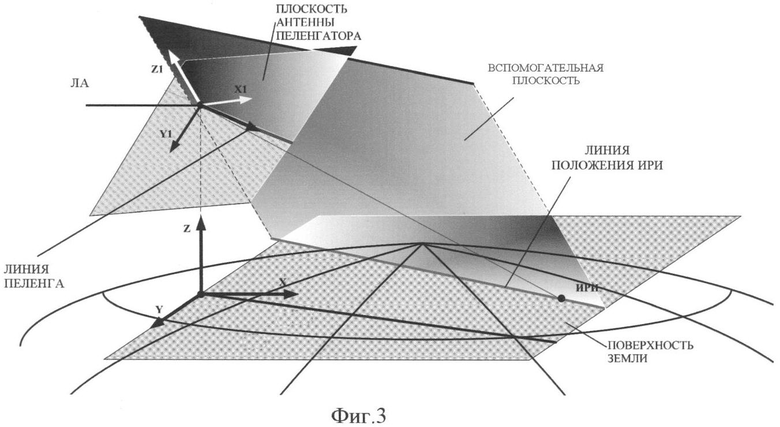
на фиг.3 - процесс построения линии положения ИРИ;
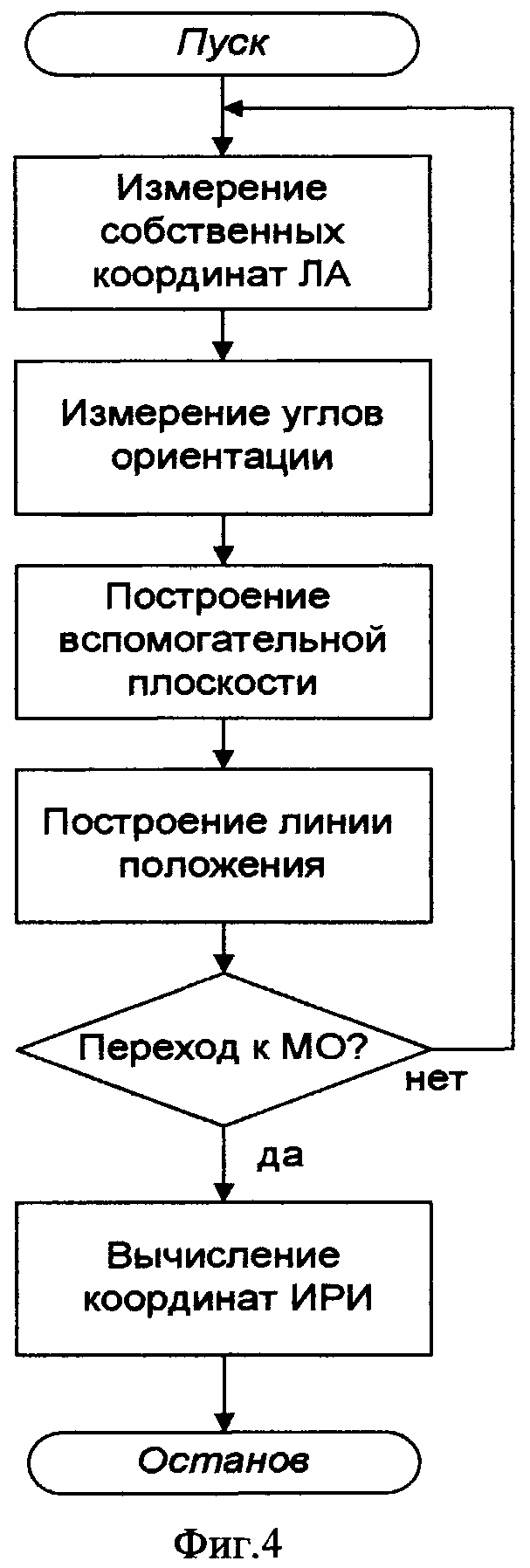
на фиг.4 - алгоритм определения координат ИРИ.
Устройство определения координат ИРИ (фиг.1), реализующее предлагаемый способ, содержит пеленгаторную антенну 1, приемник 2, навигационную антенну 3, спутниковый навигатор 4, модуль 5 вычисления пеленгов, модуль 6 весовой обработки, модуль 7 определения линий положения, вычислитель 8 координат ИРИ, модуль 9 картографирования и индикации и модуль 10 программного управления. Приемник 2 включает в своем составе последовательно соединенные смеситель 11, вход которого соединен с сигнальным выходом пеленгаторной антенны 1, а на второй вход подается сигнал с выхода гетеродина 12, первый полосовой фильтр 13, усилитель 14 промежуточной частоты, первый перемножитель 15, узкополосный фильтр 16 и фазовый детектор 17, выход которого соединен с вторым входом модуля 5 вычисления пеленгов, причем на второй вход первого перемножителя 15 подается сигнал с выхода опорного генератора 18 через второй перемножитель 19 и второй полосовой фильтр 20, выход усилителя 14 промежуточной частоты через линию 21 задержки соединен с вторым входом второго перемножителя 19, выход опорного генератора 18 подключен к второму входу фазового детектора 17. Модуль 5 вычисления пеленгов через модуль 6 весовой обработки, модуль 7 определения линий положения ИРИ и вычислитель 8 координат ИРИ подключен к модулю 9 картографирования и индикации, первый вход модуля 5 вычисления пеленгов, на третий вход которого подается сигнал с выхода навигационной антенны 3 через спутниковый навигатор 4, и второй вход модуля 7 определения линий положения ИРИ соединены с вторым выходом пеленгаторной антенны 1, первый выход модуля 10 программного управления через управляющую шину подключен к управляющим входам спутникового навигатора 4, модуля 5 вычисления пеленгов, модуля 6 весовой обработки, модуля 7 определения линий положения ИРИ и вычислителя 8 координат ИРИ, второй вход которого соединен с вторым выходом гетеродина 12, а второй выход модуля 10 программного управления подключен к управляющему входу гетеродина 12. Выход модуля 9 картографирования и индикации является выходом устройства определения координат ИРИ.
Способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА реализуется следующим образом.
При определении координат ИРИ с борта ЛА возникает ошибка, связанная со случайными флуктуациями пространственного положения плоскости пеленгаторной антенны во время полета. Определение координат ЛА при использовании аналогов производится в системе координат, связанной с ЛА, а задача местоопределения ИРИ решается в местной системе координат, начало которой связывается с Землей. Невозможно с достаточной степенью точности обеспечить неизменность исходной ориентации системы координат ЛА с местной системой координат, связанной с Землей, так как координаты и углы ориентации ЛА (курс, крен, тангаж) непрерывно изменяются в процессе полета. В связи с этим истинный пеленг на ИРИ будет отличаться от измеренного на величину ошибки ориентации Δθ. На фиг.2 приведены две декартовые прямоугольные системы координат: система 0XYZ, параллельная местной системе координат (в который откладываются пеленги и решается задача местоопределения ИРИ), ее центр связан с центром пеленгаторной антенны ЛА, и система координат 0X1Y1Z1, центр которой совпадает с центром координат 0XYZ, ось 0X1 параллельна строительной оси ЛА, а плоскость X10Y1 совпадает с плоскостью пеленгаторной антенны. Введен вектор 0Р, начало которого совпадает с центром пеленгаторной антенны, а конец лежит в точке пространственного расположения пеленгуемого ИРИ. Вектор 0P в системе координат XYZ описывается тройкой чисел xp, yp, zp, а в системе координат X1Y1Z1 - x1p, y1p, z1p. Луч 0P имеет проекцию  на плоскость X0Y и соответственно
на плоскость X0Y и соответственно  на плоскость X10Y1. Ошибка ориентации может быть вычислена как разница углов ∠X0P' и
на плоскость X10Y1. Ошибка ориентации может быть вычислена как разница углов ∠X0P' и  :
:

Положение системы координат 0X1Y1Z1 относительно системы координат 0XYZ определяется соответствующими направляющими косинусами осей:
ось 0X1 t11=cos(∠x10X), t21=cos(∠x10Y), t31=cos(∠x10Z);
ось 0Y1 tl2=cos(∠y10X), t22=cos(∠y10Y), t32=cos(∠y10Z);
ось 0Z1 t13=cos(∠z10X), t23=cos(∠z10Y), t33=cos(∠z10Z).
Если вектор 0P единичный, то для системы координат 0XYZ можно представить:

где φ - азимут прихода волны, β - угол места прихода волны.
В этом случае для системы координат 0X1Y1Z1:

Направляющие косинусы связаны со значениями углов курса - ψ, крена - γ и тангажа υ ЛА соотношениями:
Конечное выражение для ошибки ориентации получается путем последовательной замены переменных в приведенных ранее выражениях (4), (3), (2) и (1). Таким образом, величина ошибки ориентации является нелинейной функцией пяти переменных
 ,
,
где ψ, γ, υ - текущие углы курса, крена и тангажа ЛА;
φ, β - азимут и угол места прихода волны в точку расположения ЛА.
Ошибки, вызванные флуктуациями углов курса, крена и тангажа, в значительной степени систематические, зависят от типа и конструкции ЛА и поддаются измерению и расчетному прогнозированию. Отсюда следует, что исключение из процесса пеленгации определения угла места прихода волны в точку расположения ЛА позволит существенно сократить ошибки определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА.
Для расчета координат ИРИ используются линии пеленгов, под которыми понимаются проекции отрезков прямых, соединяющих ЛА (центр пеленгаторной антенны) с ИРИ, на соответствующую плоскость. В аналогах и в прототипе использовалась проекция на плоскость (поверхность) Земли. При минимизации ошибок получения координат ИРИ предлагаемым способом определение линий пеленгов производится в плоскости пеленгаторной антенны, а также введены операции формирования вспомогательных плоскостей, ортогональных плоскости пеленгаторной антенны и проходящих через каждую полученную линию пеленга, определения линий положения ИРИ как пересечений каждой вспомогательной плоскости с поверхностью Земли и вычисления координат ИРИ как точки пересечения линий положения ИРИ. На фиг.3 графически показано построение линии положения ИРИ.
Вспомогательная плоскость, ортогональная плоскости пеленгаторной антенны и проходящая через линию пеленга, описывается уравнением

коэффициенты которого находятся через формулы для уравнения плоскости, проходящей через три известные точки P1(x1, y1, z1), P2(x2, y2, z2), P3(x3, y3, z3):

Известные точки выбираются с координатами в системе координат, связанной с ЛА.

Координаты выбранных точек в местной системе координат, связанной с Землей, находятся исходя из априорного знания значений углов ориентации собственных координат ЛА:
Значения коэффициентов для управления вспомогательной плоскости находятся путем подстановки полученных координат выбранных точек.
Линия положения ИРИ находится из системы линейных уравнений:
где второе уравнение описывает поверхность Земли.
Если поверхность Земли является плоскостью, то решением приведенной системы линейных уравнений является выражение для линии положения ИРИ

с известными коэффициентами A, B и D.
Структурная схема алгоритма, иллюстрирующего способ определения координат ИРИ, приведена на фиг.4.
Таким образом, угол β места прихода волны в точку расположения ЛА отсутствует. Сокращение числа факторов, влияющих на величину Δθ, обеспечивает повышение точности определения координат ИРИ.
Весь цикл определения координат ИРИ предлагаемым способом может быть реализован с помощью устройства определения координат ИРИ, функциональная схема которого приведена на фиг.1. Сигнал fc ИРИ поступает на пеленгаторную антенну 1 и далее - на приемник 2. В приемнике 2 сигнал преобразуется в смесителе 11 в промежуточную частоту с помощью гетеродина 12 с частотой fГ.
Промежуточная частота fПЧ1 соответствует формуле fГ=fc±fПЧ1. Сигнал промежуточной частоты подается через первый полосовой фильтр 13 и усилитель 14 промежуточной частоты на вход первого перемножителя 15 и через линию 21 задержки - на вход второго перемножителя 19. Полоса пропускания первого полосового фильтра 13 выбирается близкой к ширине спектра сигнала ИРИ: ΔfПФ1=Δfc. Второй перемножитель 19 переносит промежуточную частоту к значению fПР=fПЧ1+fОГ, где fОГ - частота опорного генератора 18, подаваемая на другой вход второго перемножителя 19. Выходной сигнал второго перемножителя фильтруется вторым полосовым фильтром 20, полоса пропускания которого ΔfПФ2=ΔfПФ1=Δfc. Сигнал на средней частоте fПР с выхода второго полосового фильтра 20 подается на второй вход первого перемножителя 15, в итоге сигнал на выходе первого перемножителя 15 имеет частоту fПЧ2=fПР-fПЧ1=fОГ. Устройства 15, 18-21 обеспечивают автокорреляционную свертку спектра сигнала к частоте fПЧ2, стабильность которой полностью определяется стабильностью опорного генератора 18. Полоса пропускания последующего узкополосного фильтра 16 зависит только от допустимой инерционности приемника 2.
Сигнал частоты fПЧ2 подается на фазовый детектор 17, опорное напряжение на который поступает с выхода опорного генератора 18. Отклик фазового детектора 17 подается на второй вход модуля 5 вычисления пеленгов.
Определение пеленгов в ходе полета ЛА производится многократно модулем 5. Для нахождения координат ИРИ достаточно двух пеленгов. Но погрешность определения координат зависит от среднеквадратической погрешности отдельных пеленгов [4, с.12]:
 ,
,
где R1 и R2 - расстояние между точкой нахождения ЛА и ИРИ;
σa1 и σa2 - среднеквадратические погрешности пеленгации;
γ - угол между двумя пеленгами.
Отсюда следует, что для уменьшения погрешности измерений координат ИРИ необходимо обоснованно выбирать пару полученных пеленгов.
Решение этой задачи обеспечивается модулем 6 весовой обработки, на который подаются кодированные пеленги с выхода модуля 5.
Модуль 6 при обработке пеленгов использует весовые коэффициенты:
 ,
,  ,
,
где n - число независимых пар пеленгов;
 ,
,  - средневзвешенные оценки координат ИРИ;
- средневзвешенные оценки координат ИРИ;
xi, yi - координаты точки пересечения i-й пары пеленгов;
pxi, pyi - весовые коэффициенты i-й пары пеленгов, которые для получения минимальных погрешностей должны быть выбраны обратно пропорционально дисперсиям Dx, Dy каждого измерения [4, с.19]
 ,
,
где a i, a j - курсовые углы;
Ri=D/sina i, Rj=D/sina j.
Кодированная пара значений пеленгов с выхода модуля 6 весовой обработки поступает на информационный вход модуля 7 определения линий положения ИРИ, функционирование которого осуществляется в соответствии с приведенными формулами (9), согласно которым осуществляются операции определения вспомогательных плоскостей, ортогональных плоскости пеленгаторной антенны и проходящих через каждую полученную линию пеленга, и определения линий положения ИРИ как пересечения каждой вспомогательной плоскости с поверхностью Земли (формула (10)).
Выходные сигналы модуля 7 определения линий положения ИРИ подаются на вычислитель 8 координат ИРИ и далее - на модуль 9 картографирования и индикации.
Алгоритм работы устройства пеленгации ИРИ (фиг.1) следующий:
- запуск осуществляется по команде модуля 10 программного управления;
- с выхода 2 модуля 10 подается сигнал на управляющий вход гетеродина 12, обеспечивая настройку на среднюю частоту сигнала ИРИ;
- с выхода 1 модуля 10 подаются управляющие сигналы на спутниковый навигатор 4, определяющий координаты ЛА, а также углы курса, крена и тангажа, и модули 5-8 устройства пеленгации;
- модуль 5 вычисляет пеленги на ИРИ, используя в качестве опорных данных сигнал положения пеленгаторной антенны 1, поступающий на вход 1 модуля 5, сигнал с выхода фазового детектора 17 и сигналы спутникового навигатора 4. Результаты в виде кодированных значений пеленгов подаются на модуль 6 весовой обработки;
- модуль 6 весовой обработки выбирает пару линий пеленгов, соответствующую минимуму погрешности произведенных измерений. Результаты обработки подаются на модуль 7;
- модуль 7 определяет линии положения ИРИ, используя в качестве опорных сигналы модуля 6 весовой обработки и сигнал положения пеленгаторной антенны 1. Результаты подаются на вычислитель 8 координат ИРИ;
- вычислитель 8 определяет координаты, одновременно регистрируя частоту ИРИ по сигналу гетеродина 12 с учетом сдвига на величину промежуточной частоты, и подает выходные данные на модуль 9, обеспечивающий картографирование, индикацию и регистрацию результатов местоопределения ИРИ.
Устройство не требует для определения координат ИРИ информации о угле места прихода волны сигнала ИРИ.
Все узлы приемника 2 могут быть выполнены аналогично соответствующим узлам приемника по патенту RU №2275746.
Модули 5-7 и вычислитель 8 координат ИРИ могут быть выполнены, например, на базе процессоров Texas Instruments TMS 320 C 6416/6713 и ПЛИС [5].
В качестве спутникового навигатора 4 может быть использовано, например, устройство МРК 11 [6].
Таким образом, предлагаемый способ позволяет существенно повысить точность определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА. При испытаниях в реальных условиях точность определения координат ИРИ повышалась от 20 до 60% в зависимости от условий полета ЛА. Экспериментальная проверка предлагаемого способа подтвердила правильность и достаточность технических решений.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Василин Н.Я. Беспилотные летательные аппараты. - Мн.: ООО «Попурри», 2003.
2. Способ пеленгования источника сигнала. Патент RU №2192651, МПК G01S 3/00, 3/14, опубл. 10.11.2002, бюл. №31.
3. Станция радиотехнической разведки. Патент RU №2275746, МПК G01S 7/28, 13/32, опубл. 27.04.2006.
4. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: Радиотехника, 2008.
5. Потехин Д.С., Тарасов И.Е. Разработка систем цифровой обработки сигналов на базе ПЛИС. - М.: Горячая линия - Телеком, 2007.
6. Аппаратура МРК-11. Руководство по эксплуатации. УЭ2.517.006 РЭ. Научно-исследовательский институт радиотехники КГТУ. - Красноярск, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам | 2016 |
|
RU2638177C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ КОРОТКОВОЛНОВОГО ДИАПАЗОНА | 2012 |
|
RU2490661C1 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2603356C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
Изобретение относится к радиотехнике и может быть использовано для определения координат источников радиоизлучений (ИРИ), в частности для определения координат ИРИ при амплитудно-фазовой пеленгации с борта летательного аппарата (ЛА). Достигаемый технический результат изобретения - повышение точности определения координат ИРИ. Сущность изобретения заключается в том, что в известный способ определения координат ИРИ при амплитудно-фазовой пеленгации с борта ЛА, включающий прием радиосигналов бортовой пеленгаторной антенной, частотную селекцию, определение линий пеленгов, регистрацию и весовую обработку полученных данных, введены операции формирования вспомогательных плоскостей, ортогональных плоскости пеленгаторной антенны и проходящих через каждую полученную линию пеленга, определения линий положения ИРИ как пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисления координат ИРИ как точки пересечения линий положения ИРИ, а определение линий пеленгов осуществляется в плоскости пеленгаторной антенны. 4 ил.
Способ определения координат источника радиоизлучений при амплитудно-фазовой пеленгации с борта летательного аппарата, включающий прием радиосигналов бортовой пеленгаторной антенной, частотную селекцию, определение линий пеленгов, регистрацию и весовую обработку полученных данных, отличающийся тем, что линии пеленгов определяют в плоскости пеленгаторной антенны, а по результатам весовой обработки формируют вспомогательные плоскости, ортогональные плоскости пеленгаторной антенны и проходящие через каждую полученную линию пеленга, определяют линии положения источника радиоизлучений как линии пересечения каждой вспомогательной плоскости с поверхностью Земли и вычисляют координаты источника радиоизлучений как точку пересечения линий положения источника радиоизлучений.
| МЕЛЬНИКОВ Ю.П., ПОПОВ С.В | |||
| Радиотехническая разведка | |||
| Методы оценки эффективности местоопределения источников излучения | |||
| - Москва, Радиотехника, 2008, с.18-22 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2334244C1 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ В ДВУХПОЗИЦИОННОЙ УГЛОМЕРНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2246121C9 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2294546C2 |
| Способ изготовления ферритовыхСЕРдЕчНиКОВ МАгНиТНыХ гОлОВОК | 1979 |
|
SU834748A1 |
| US 7567627 В1, 28.07.2009 | |||
| СПОСОБ ПРОИЗВОДСТВА ОСНОВЫ ИЗ ЦИТРУСОВЫХ ПЛОДОВ ДЛЯ ЗАМУТНЁННЫХ НАПИТКОВ | 2002 |
|
RU2209016C1 |
| US 7579989 B2, 25.08.2009. | |||

