Изобретение относится к способам неразрушающего контроля качества магистральных трубопроводов, в частности к способам внутритрубной дефектоскопии трубопроводов с помощью дефектоскопов-снарядов (Техника и технология транспорта и хранения нефти и газа. Под редакцией д.т.н. В.Ф.Новоселова,- М.: Недра 1992, с. 210).
Известные способы внутритрубной дефектоскопии трубопроводов при помощи дефектоскопов-снарядов заключаются в измерении параметров материала стенки трубы с помощью чувствительных элементов, размещенных на дефектоскопе-снаряде, в процессе его непрерывного перемещения по трубопроводу в потоке транспортируемого продукта. Результаты измерений подвергаются первичной обработке и регистрируются в блоке памяти дефектоскопа-снаряда. Информация, накопленная в блоке памяти дефектоскопа-снаряда в результате его перемещения по многокилометровому контролируемому участку трубопровода, воспроизводится наземными средствами вторичной обработки информации после выемки дефектоскопа-снаряда на конечном участке трубопровода, идентифицируется и представляется пользователю.
Известные способы дефектоскопии трубопроводов для выявления дефектов стенок трубы, таких как раковины, трещины (продольные и поперечные), стресс-коррозия, участки напряженно-деформированного состояния стенок и т.д., могут использовать различные методы контроля (оптический, магнитный, электромагнитный, тепловой, радиационный и т.д.) в наведенном и остаточном электромагнитных полях или в собственном магнитном поле. (Неразрушающий контроль качества изделий электромагнитными методами,- М.: Энергия 1978, с. 8-15).
Анализ известных способов дефектоскопии трубопроводов позволяет сделать вывод о том, что одним из важных вопросов является достаточность получаемой информации для оценки параметров дефектов стенок с заданной точностью при имеющейся погрешности измерений. Система обработки информации с внутритрубного дефектоскопа по сути является системой распознавания объектов на трубопроводе. Это связано с тем, что кроме сигналов от дефектов стенок регистрируются также сигналы от разных объектов и элементов трубопровода: маркеров, отводов, сварных швов и т.д., поэтому необходимо разделение сигналов. При соблюдении единообразия и технических условий эта задача дефектоскопии решается довольно просто. Несколько сложнее обстоит дело с распознаванием дефектов, так как методы контроля, применяемые в дефектоскопии, относятся к непрямым методам определения параметров дефектов. Для получения более достоверной и более точной информации о дефекте необходим возврат дефектоскопа-снаряда в зону предполагаемого дефекта и повторная дефектоскопия зоны дефекта с меньшими скоростями движения.
В известных способах внутритрубной дефектоскопии дефектоскоп-снаряд перемещается по трубе со скоростью, определяемой скоростью движения потока транспортируемого продукта, что не позволяет снизить скорость перемещения дефектоскопа-снаряда и тем более вернуть дефектоскоп-снаряд в зону предполагаемого дефекта для получения исчерпывающей информации о дефекте.
Наиболее близким к предлагаемому способу является способ внутритрубной дефектоскопии, заключающийся в измерении величины электрического тока, распределенного в стенках трубы, в процессе перемещения устройства по трубопроводу в потоке транспортируемого продукта, привязке к текущим координатам, регистрации результатов измерений и текущих координат и обработке результатов измерений [1].
Данный способ обладает недостаточными точностью дефектоскопии и достоверностью информации, получаемой в результате его реализации.
Целью изобретения является повышение точности и увеличение достоверности информации, получаемой в процессе внутритрубной дефектоскопии, за счет проведения повторной дефектоскопии зоны предполагаемого дефекта со скоростью, обеспечивающей заданную точность измерений, а также расширение функциональных возможностей дефектоскопа-снаряда за счет совмещения операций дефектоскопии стенок трубопровода и его внешней изоляции.
Предлагаемый способ внутритрубной дефектоскопии при помощи дефектоскопов-снарядов заключается в измерении величины электрического тока, распределенного в стенках трубы, в процессе перемещения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта, привязке к текущим координатам и регистрации результатов измерений и текущих координат с последующей обработкой результатов измерений. Причем в процессе перемещения дефектоскопа-снаряда по трубопроводу измеряют параметры материала стенок трубы, а также в процессе перемещения дефектоскопа-снаряда по направлению потока транспортируемого продукта первоначально определяют отклонение величины параметров материала стенок трубы и величины электрического тока, распределенного в стенках трубы, от их заданных значений. Одновременно определяют и регистрируют координаты выявленного отклонения. Затем по сформированной в системе управления команде производят остановку дефектоскопа-снаряда, возвращают его к координатам выявленного отклонения и со скоростью, обеспечивающей заданную точность измерений, производят повторную дефектоскопию зоны выявленного отклонения. Наконец, производят последующую обработку и регистрацию информации в блоке памяти дефектоскопа-снаряда.
Известно устройство для нахождения дефектов в стенке подземного трубопровода, перемещающееся по трубопроводу под действием потока транспортируемого продукта. Оно содержит намагничивающую систему, индикаторную систему, электронный блок, записывающую систему и источник питания, расположенные в гибко связанных узлах, несущих на себе резиновые манжеты. Датчики индикаторной системы в известном устройстве укреплены между кольцами постоянных магнитов, установленных на амортизаторах, и размещены группами в кассетах, перекрывающих все сечение трубопровода. (Авт.св. N 246667, кл. G 01 V 3/11, 1969).
Недостатком этого устройства является неспособность его перемещаться против потока транспортируемого продукта обратно в зону выявленного дефекта для повторной дефектоскопии.
Наиболее близким к предлагаемому дефектоскопу-снаряду в части обеспечения функции его передвижения обратно в зону выявленного дефекта является устройство для перемещения в трубопроводе. Оно представляет собой двухзвенный механизм с приводом осевого возвратно-поступательного перемещения одного звена относительно другого, каждое звено которого имеет средство для фиксации в трубопроводе, состоящее из опорных надувных подушек и узла их радиального перемещения. Узлы радиального перемещения опорных надувных подушек выполнены в известном устройстве в виде кривошипно- ползунных механизмов, ползуны которых имеют возможность перемещения по оси звена с фиксацией в заданном положении, при этом каждая опорная надувная подушка размещена на шарнире, связывающем оба стержня диады соответствующего кривошипно-ползунного механизма, а каждый стержень состоит из двух звеньев, связанных посредством катаракта, поршень которого подпружинен, а канал, соединяющий полости катаракта, снабжен запорным органом. (авт. св. N 1278044, кл. B 08 B 9/04, 1986).
Недостатком известного устройства является невозможность использования для обеспечения его функционирования энергетики транспортируемого продукта и в связи с этим ограниченный ресурс его работы по питанию. Кроме того, известное устройство не может обеспечить предлагаемый способ внутритрубной дефектоскопии трубопроводов.
Наиболее близким к предлагаемому дефектоскопу-снаряду является устройство [1] , предназначенное для внутритрубной дефектоскопии, содержащее электрически связанные между собой блоки источников излучения, блоки чувствительных элементов, систему управления, систему определения координат, систему обработки и регистрации информации и систему электропитания. Оно представляет собой цилиндр с наружным диаметром, меньшим внутреннего диаметра трубопровода, перемещающийся вдоль трубопровода. Внутри цилиндра размещены две группы электромагнитных катушек на некотором расстоянии друг от друга, симметрично относительно оси трубопровода, электродвигатель, вращающий электромагнитные катушки, прибор, обрабатывающий данные о напряжении тока, вызываемого в катушках магнитным полем, создаваемым токами, циркулирующими в стенках трубопровода. По изменению тока определяются поврежденные места изоляции трубопровода.
Данное устройство не может обеспечить предлагаемый способ внутритрубной дефектоскопии трубопроводов.
Дефектоскоп-снаряд для осуществления предлагаемого способа внутритрубной дефектоскопии содержит электрически связанные между собой, блоки источников излучения, блоки чувствительных элементов, систему управления, систему определения координат, систему обработки и регистрации информации и систему электропитания. При этом дефектоскоп-снаряд содержит двухмодульный механизм с приводом осевого возвратно-поступательного перемещения одного модуля относительно другого, каждый модуль которого имеет опорные органы с узлами их радиального перемещения для фиксации в трубопроводе. Один из модулей снабжен аэродинамическим винтом, вращающимся от потока транспортируемого продукта. Энергия, накапливаемая с помощью вращения аэродинамического винта, используется для привода всех силовых узлов предлагаемого дефектоскопа-снаряда. Вал аэродинамического винта связан с валом гидронасоса, который в свою очередь связан рабочими магистралями через электрогидроклапаны с гидроприводом осевого возвратно-поступательного перемещения одного модуля относительно другого, с гидроприводами вращения блоков чувствительных элементов, с гидроприводом вращения электрогенератора системы электропитания, с гидроприводами узлов радиального перемещения опорных органов. Электрогидроклапаны включены в контур системы управления и с их помощью осуществляется управление фазами перемещения предлагаемого дефектоскопа-снаряда. При решении комплексной задачи контроля трубопроводов одновременно несколькими методами, например методом магнитной дефектоскопии и тепловым методом, дефектоскоп-снаряд снабжается соответствующими блоками источников излучения и блоками чувствительных элементов.
Для обеспечения сканирования чувствительными элементами всей внутренней поверхности трубопровода блоки чувствительных элементов выполнены с возможностью их вращения относительно продольной оси предлагаемого дефектоскопа-снаряда от гидропривода, соединенного с гидронасосом.
Для подзаряда аккумуляторной батареи, входящей в состав системы электропитания, используется электрогенератор, вращающийся от гидропривода, соединенного с гидронасосом.
Для обеспечения перемещения и фиксации внутри трубопровода предлагаемый дефектоскоп-снаряд снабжен опорными органами, например опорными подпушками или ластами, с узлами их радиального перемещения, которые в зависимости от режима передвижения дефектоскопа-снаряда в трубопроводе, с помощью гидропривода, соединенного с гидронасосом, обеспечивают необходимое усилие прижима опорных поверхностей к внутренней поверхности трубопровода и, тем самым, необходимую скорость перемещения.
Для организации шагового режима передвижения предлагаемого дефектоскопа-снаряда опорные органы выполнены в виде колес, снабженных тормозами мгновенного действия, например ленточными, с гидроприводом, связанным рабочими магистралями через электрогидроклапаны с гидронасосом, причем электрогидроклапаны в качестве исполнительных элементов включены в контур системы управления.
Для организации непрерывного режима передвижения предлагаемого дефектоскопа-снаряда под действием потока транспортируемого продукта и возможности регулирования скорости передвижения на узлах радиального перемещения опорных колес закреплены кривошипно-кулисные механизмы, кулисы которых через кривошипы, установленные на осях опорных колес, связаны с поршнями регуляторов скорости, полости которых соединены между собой через ограничители расхода. Регулирование расхода рабочей жидкости между полостями регуляторов скорости позволяет изменять в необходимом интервале тормозное усилие опорных колес и тем самым регулировать скорость передвижения предлагаемого дефектоскопа-снаряда.
На фиг. 1 изображен общий вид дефектоскопа-снаряда, продольный разрез; на фиг. 2 - конструкция опорных колес с ленточными тормозами; на фиг. 3 - конструкция кривошипно-кулисного механизма опорных колес.
Дефектоскоп-снаряд, изображенный на фиг. 1, содержит модули 1 и 2, связанные между собой гидроприводом осевого возвратно-поступательного перемещения 3 одного модуля относительно другого. Гидропривод 3 связан с каждым из модулей с помощью шарнирного соединения. Каждый из модулей представляет собой гермоотсек, снаружи которого с помощью шарнирных соединений укреплены опорные органы 4 с узлами их радиального перемещения 5. Каждый из модулей имеет два ряда опорных органов, равномерно распределенных по диаметру гермоотсека в каждом из рядов. В ряду может быть, например, по 6 опорных органов. На наружной поверхности гермоотсека модуля 1 установлены блоки источников излучения 6, а на наружной поверхности гермоотсека модуля 2 - блоки чувствительных элементов 7 с гидроприводами их вращения 16. Внутри гермоотсека модуля 2 размещаются приборы системы управления 8, системы определения координат 9, системы обработки и регистрации информации 10 и система электропитания 11. На наружной поверхности гермоотсека модуля 1 установлен аэродинамический винт 12, вал которого через сальник соединен с валом гидронасоса 13, размещенного внутри гермоотсека. Гидронасос 13 через электрогидроклапаны 14 связан рабочими магистралями 15 с гидроприводом осевого возвратно-поступательного перемещения 3 одного модуля относительно другого, с гидроприводами вращения 16 блоков чувствительных элементов 7, с гидроприводом вращения 17 электрогенератора 18 системы электропитания 11 и с гидроприводами 19 узлов радиального перемещения 5 опорных органов 4.
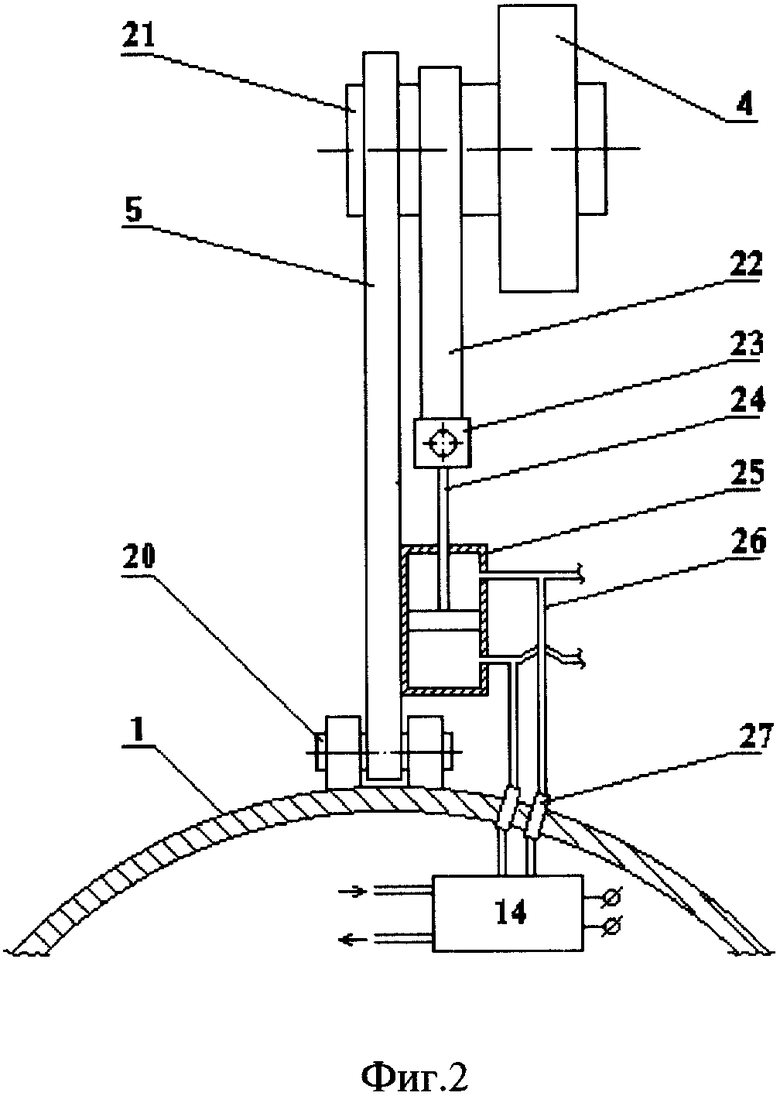
Как показано на фиг. 2, на корпусе 1 гермоотсеков обоих модулей с помощью шарнирных соединений 20 установлены узлы радиального перемещения 5 с осями 21, на которые жестко посажены опорные колеса 4. Оси 21 охватываются лентами тормозя 22, которые с помощью узлов 23 крепятся к штокам 24 гидроприводов 25. Полости гидроприводов 25 рабочими магистралями 26, входящими в гермоотсеки через гермопроходники 27, связаны с электрогидроклапанами 14. Причем гидроприводы 25, обеспечивающие торможение опорных колес каждого из модулей, объединены с помощью рабочих магистралей в две отдельные группы, каждая из которых связана со своим электрогидроклапаном.
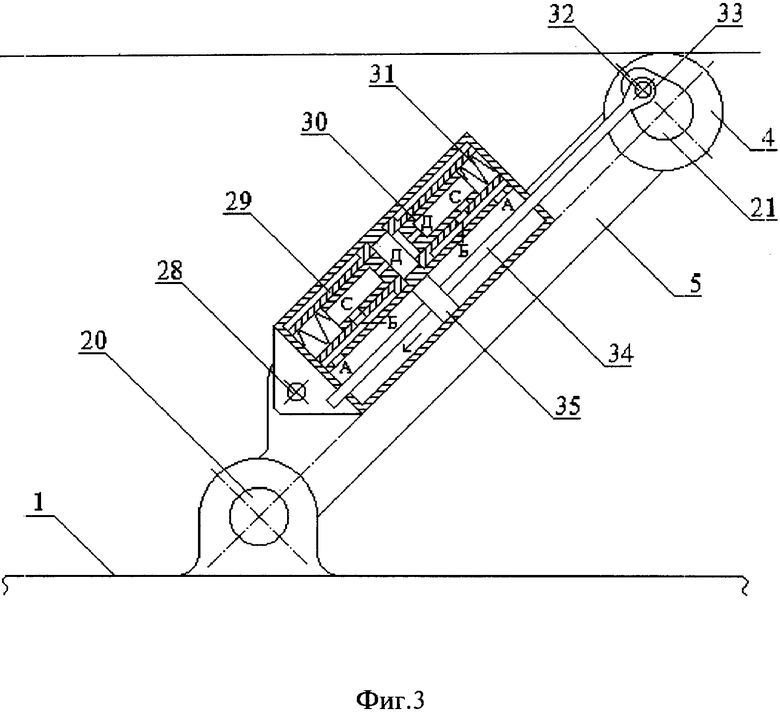
Как показано на фиг. 3, на узлах радиального перемещения 5 опорных колес 4 с помощью шарнирных соединений 28 закреплены кривошипно-кулисные механизмы, кулисы 33 которых через кривошипы 32 и штоки 34 связаны с поршнями 35 регуляторов скорости. Полости каждого регулятора скорости через отверстия А и профильные щели 6 связаны с полостями ограничителя расхода. В каждой из двух полостей ограничителя расхода установлена гильза 29 с профильной щелью 6 и золотник 30 с отверстием С и дроссельным отверстием Д, подпружиненный пружиной 31.
Дефектоскоп-снаряд работает следующим образом.
Через шлюзовую камеру снаряд вводится в начало контролируемого участка трубопровода. Причем на период контроля трубопровода подача транспортируемого продукта через него не прекращается. Оптимальная расчетная скорость движения снаряда по трубе составляет 1... 3 м/с при скорости движения транспортируемого продукта, например газа, до 17 м/с.
Предлагаемый дефектоскоп-снаряд имеет два режима передвижения по трубопроводу: непрерывный и шаговый.
Непрерывный режим передвижения обеспечивается, так называемой "байпасной" схемой взаимодействия транспортируемого продукта и дефектоскопа-снаряда, при которой транспортируемый продукт обтекает элементы конструкции снаряда, создавая на них и на аэродинамическом винте 12 необходимую осевую силу, заставляющую снаряд непрерывно перемещаться в направлении потока транспортируемого продукта. Аэродинамический винт 12, обтекаемый транспортируемым продуктом, начинает вращаться. Отбор мощности с вала винта осуществляется гидронасосом 13, от которого запитывается вся гидросистема снаряда.
С помощью гидроприводов 19 узлов радиального перемещения 5 опорных органов 4 (опорных подушек или ласт) обеспечивается необходимое усилие прижима опорных органов к внутренней поверхности трубы и тем самым регулирование тормозного момента дефектоскопа-снаряда.
Регулирование шага аэродинамического винта и параметров гидронасоса по командам от системы управления 8 позволяет реализовать широкий диапазон изменения величины осевой силы, действующей на снаряд, что с одновременным регулированием тормозного момента позволяет поддерживать стабильность скорости его непрерывного движения в необходимом интервале, соответствующем выбранному закону управления.
Шаговый режим передвижения дефектоскопа-снаряда обеспечивается с помощью гидропривода осевого возвратно-поступательного перемещения 3 модуля 1 относительно модуля 2 и с помощью гидроприводов 19 узлов радиального перемещения 5 опорных органов 4. При подаче команды на переход к шаговому режиму передвижения гидроприводы 19, например модуля 1, создают на узлах радиального перемещения 5 такое усилие прижима опорных органов 4 к стенкам трубы, что модуль 1 неподвижно фиксируется в трубе. Затем с помощью гидропривода осевого возвратно-поступательного перемещения 3 модуль 2 перемещается в направлении против потока транспортируемого продукта на расстояние в пределах хода поршня гидропривода. Максимальная длина одного шага соответствует полной длине хода поршня гидропривода 3. Далее модуль 2 с помощью гидроприводов 19 фиксируется в трубе, а на модуле 1 усилие прижима опорных органов к стенкам трубы ослабляется и он с помощью гидропривода 3 подтягивается к модулю 2 и т.д.
Предлагаемый дефектоскоп-снаряд может передвигаться в шаговом режиме и в направлении потока транспортируемого продукта, например, в случае большого угла подъема трубопровода на местности или в других случаях при получении команды от системы управления 8.
В процессе контроля трубопровода дефектоскоп-снаряд совершает сложное движение. В режиме непрерывного передвижения снаряда по направлению потока транспортируемого продукта производится первоначальное определение отклонения величины параметров материала стенок трубы и величины электрического тока, распределенные в стенках трубы, от их заданных значений. На этом этапе обработка измеряемой информации идет в темпе ее поступления с одновременным определением и регистрацией координат выявленных отклонений с помощью систем 9 и 10. В случае выявления отклонения одного из измеряемых параметров ее его заданного значения система управления 8 дает команду на прекращение режима непрерывного передвижения снаряда и переход в режим шагового передвижения. Дефектоскоп-снаряд останавливается и начитает в шаговом режиме возвратно-поступательное передвижение к координатам выявленного отклонения. Когда в зоне выявленного отклонения оказываются блоки источников излучения 6 и блоки чувствительных элементов 7, производится фиксация дефектоскопа-снаряда в трубе и повторная дефектоскопия зоны предполагаемого дефекта, при которой модуль 2 с установленными на нем блоками чувствительных элементов 7 совершает продольное перемещение, а сами блоки 7 совершают вращательное движение со скоростями, обеспечивающими заданную точность измерений. На этом этапе производится повторная обработка и регистрация информации с помощью системы 10 и после ее окончания дефектоскоп-снаряд снова переходит в режим непрерывного передвижения в направлении потока транспортируемого продукта до выявления очередного отклонения измеряемых параметров от их заданных значений с определением координат этих отклонений.
Аналогичный процесс передвижения дефектоскопа-снаряда поддерживается на всем контролируемом участке магистрального трубопровода.
В процессе передвижения дефектоскопа-снаряда и в период его фиксации в трубе блоки чувствительных элементов 7 совершают вращательное движение относительно продольной оси снаряда с помощью гидроприводов 16, соединенных через гидроклапаны 14 с гидронасосом 13. Чувствительные элементы блоков, прижимаемые к внутренней поверхности трубы, например с помощью гибких ласт, обеспечивают сканирование всей ее внутренней поверхности.
Как указывалось выше, контроль стенок трубопровода может проводиться в наведенном, в остаточном электромагнитных полях или в собственном магнитном поле. В зависимости от применяемого метода контроля или от комплексного применения нескольких методов контроля конструкции блоков источников излучений 6 и блоков чувствительных элементов 7 могут быть различны. Например, для контроля в наведенном магнитном поле блоки источников излучений 6 конструктивно представляют собой магнитную систему, намагничивающую стенки трубы до состояния насыщения, а поля рассеяния дефектов намагниченной стенки регистрируются с помощью чувствительных элементов, встроенных в магнитную систему и размещенных между ее полюсами. В этом случае элементы, размещенные в блоках 7 и чувствительные к наличию магнитного поля, будут регистрировать поля рассеяния дефектов остаточного магнитного поля при движении модуля 2 в направлении модуля 1, что позволяет получить дополнительную информацию, облегчающую выявление дефектов.
В случае применения метода контроля напряженно-деформированного состояния стенок по длине трубопровода блоки источников излучения 6 отсутствуют, а блоки 7 набираются из элементов, чувствительных к собственному магнитному полю трубопровода, например феррозондовыми датчиками или датчиками Холла.
В случае решения задачи контроля качества внешней изоляции трубопровода блоки источников излучения 6 также отсутствуют, а блоки 7 набираются из элементов, чувствительных к наличию переменного магнитного поля, наводимого токами катодной защиты трубопровода.
Два последних метода контроля, например, конструктивно могут быть объединены в одном блоке чувствительных элементов 7.
Вращение блоков чувствительных элементов 7 вокруг продольной оси дефектоскопа-снаряда позволяет выявить наличие дефектов стенок трубы, расположенных вдоль ее образующей, например продольных трещин.
Система управления 8 обеспечивает управление всеми фазами работы и движения дефектоскопа-снаряда по трубопроводу. Исполнительными органами для системы управления являются электрогидроклапаны 14.
Система определения координат 9 работает следующим образом.
Она состоит из одометров, служащих для определения пройденного дефектоскопом-снарядом пути и продольной координаты дефекта. В качестве колес одометров используются опорные колеса 4, в которых по периметру на одинаковом расстоянии друг от друга устанавливаются магниты, а в опорах узлов радиального перемещения 5 закрепляются магниточувствительные микросхемы или катушки индуктивности, в которых при прохождении магнитов появляются сигналы, передаваемые в электронный блок системы обработки и регистрации информации 10. Дискретность прохождения сигналов от каждого одометра соответствует выбранной дискретности пройденного пути, а в электронном блоке производится усреднение информации, поступающей от нескольких одометров. Для определения угловой координаты дефекта используется то обстоятельство, что предлагаемый дефектоскоп-снаряд представляет собой самоустанавливающуюся конструкцию, которая за счет смещения центра масс занимает в трубе вполне определенное положение, а угол поворота блоков чувствительных элементов 7 относительно продольной оси дефектоскопа-снаряда всегда известен.
Система обработки и регистрации информации 10 обрабатывает и регистрирует всю измерительную и служебную информацию дефектоскопа-снаряда. Регистрация информации производится на жестком магнитном диске или flach-памяти.
Подзаряд аккумуляторной батареи, входящей в состав системы электропитания 11, осуществляется с помощью электрогенератора 18, вращающегося от гидропривода 17, соединенного рабочей магистралью 15 с гидронасосом 13.
Обеспечение поочередной мгновенной остановки модулей 1 и 2 дефектоскопа-снаряда в режиме шагового передвижения осуществляется с помощью ленточных тормозов 22, заклинивающих оси 21 опорных колес 4 по командам от системы управления 8.
Регулятор скорости с ограничителем расхода, показанные на фиг.3, работают следующим образом. При движении поршня 35 в направлении стрелки рабочая жидкость свободно вытесняется через отверстие А из левой полости регулятора, через открытую профильную щель Б, отверстие С и дроссельное отверстие Д золотника левой полости ограничителя расхода и поступает на кромки дросселя золотника правой полости ограничителя, создавая на нем перепад давлений, который преодолевает усилие пружины 31 и, таким образом, перемещает правый золотник, уменьшая при этом проходное сечение профильной щели Б, через которую рабочая жидкость поступает в правую полость регулятора скорости. При движении поршня 35 в противоположном направлении происходит перекрытие профильной щели левым золотником и т.д. Величина перекрытия профильных щелей поддерживается золотниками такой, чтобы обеспечивался постоянный расход рабочей жидкости в полостях регулятора скорости и, таким образом, поддерживалась постоянная окружная скорость опорного колеса 4 независимо от усилий, действующих на дефектоскоп-снаряд.
Регулирование окружной скорости опорных колес 4 и, тем самым скорости движения дефектоскопа-снаряда возможно путем регулирования проходного сечения профильных щелей с помощью дополнительного устройства по командам от системы управления 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДВУХМОДУЛЬНЫЙ ДЕФЕКТОСКОП-СНАРЯД | 2014 |
|
RU2562333C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2270955C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2395750C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХМОДУЛЬНЫМ ДЕФЕКТОСКОПОМ-СНАРЯДОМ В ПРОЦЕССЕ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2425278C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2369783C1 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ ПРОФИЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2393466C2 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНЫХ ОБСЛЕДОВАНИЙ ТРУБОПРОВОДОВ | 1994 |
|
RU2102738C1 |
| МАГНИТНЫЙ ПРОХОДНОЙ ДЕФЕКТОСКОП | 1998 |
|
RU2144182C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АВТОНОМНЫМ ИСТОЧНИКОМ ЭЛЕКТРОЭНЕРГИИ | 2005 |
|
RU2300046C1 |
Сущность изобретения: способ заключается в измерении параметров материала стенок трубы и величины электрического тока, распределенного в стенках трубы, при перемещении дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта. Определяют отклонение измеренных параметров от их заданных значений, с помощью системы определения координат определяют координаты выявленного отклонения, регистрируют их, по команде из системы управления производят остановку устройства и возвращают его к координатам выявленного отклонения. С заданной скоростью проводят повторную дефектоскопию. Обрабатывают и регистрируют результаты измерений. Устройство содержит двухмодульный механизм, снабженный блоками источников излучения, каждый модуль имеет опорные органы с узлами их радиального перемещения, один из модулей снабжен аэродинамическим винтом, вал которого соединен с валом гидронасоса, от которого через электрогидроклапаны запитывается вся гидросистема устройства, обеспечивающая осевое возвратно-поступательное перемещение одного модуля относительно другого, вращение блоков чувствительных элементов, вращение электрогенератора системы электропитания и перемещение опорных органов. Повышается точность, увеличивается достоверность информации, расширяются функциональные возможности устройства. 2 с. и 2 з.п. ф-лы, 3 ил.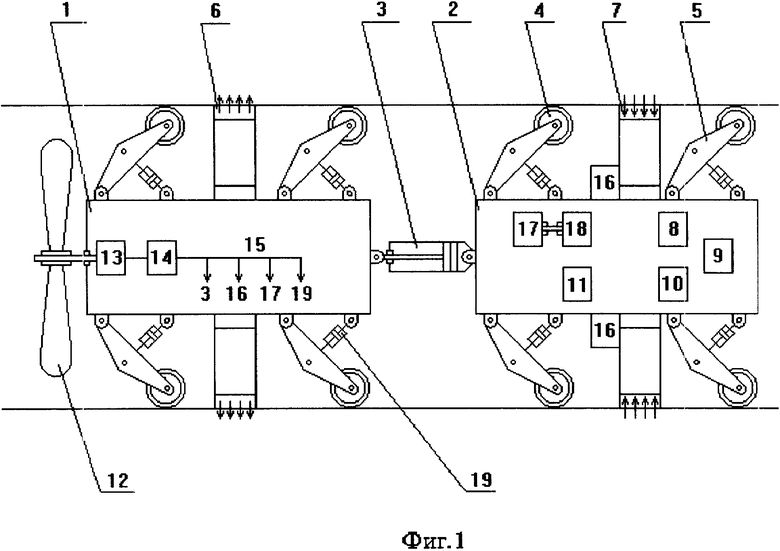
| FR, заявка, 2667159, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

