Изобретение относится к области приборостроения, а именно - к инерционным датчикам порогового действия, осуществляющим регистрацию и запоминание в автономном режиме (без источника электропитания) информации о достижении ускорением заданных предельных уровней.
Подобные датчики могут быть использованы для автономной регистрации заданных уровней ускорений, которым может быть подвергнут опасный груз, например, при транспортных авариях.
Чтобы использовать инерционные пороговые датчики в качестве регистраторов заданных уровней ускорений с запоминанием информации, их конструкция должна иметь дополнительные элементы в виде защелок или стопоров, фиксирующих инерционное тело датчика в конце рабочего хода. Так как инерционное тело, как правило, контактирует с внутренними поверхностями корпуса датчика, то при его перемещении возникают силы трения. При этом фиксаторы инерционного тела будут способствовать образованию дополнительных пар трения.
Наряду с усложнением конструкции образование дополнительных пар трения неизбежно ухудшит точностные характеристики датчика. Кроме того, наличие в конструкции датчика даже небольшого количества пар трения является препятствием для его миниатюризации, так как с уменьшением массы инерционного тела сила инерции, возникающая при действии на датчик ускорения, может стать сопоставимой по величине с суммарной силой трения.
Для того чтобы сохранить информацию о превышении ускорением заданного порога, целесообразно использовать упругий элемент, который при перемещении инерционного тела не возвращается в исходное положение. У таких упругих элементов имеется два устойчивых состояния, а переход из одного устойчивого состояния (исходного положения) в другое (конечное положение) осуществляется благодаря тому, что вектор восстанавливающей силы упругого элемента меняет свое направление на противоположное. При смене направления вектора восстанавливающей силы происходит так называемое прощелкивание упругого элемента.
Известен инерционный пороговый датчик, предназначенный для запоминания факта действия ускорения, в котором используется эффект прощелкивания упругого элемента (см. патент США №4789762, МПК Н01Н 35/14, опубл. 1988 г.). Упругий элемент датчика выполняется из тонкого упругого стержня прямоугольного сечения, которому придана форма пологой арки. При этом концы арки не закрепляются на корпусе датчика. Для обеспечения требуемого порога центральная часть пологой арки при сборке датчика предварительно деформируется, благодаря чему инерционное тело, контактируя с аркой, поджимается к опорной поверхности. Отношение усилия, с которым инерционное тело поджимается к опорной поверхности, к массе инерционного тела обеспечивает датчику требуемый порог по ускорению срабатывания. При действии ускорения инерционное тело нагружает пологую арку в центральной части, и при достижении ускорением величины, равной пороговому значению, инерционное тело перемещается на величину рабочего хода. Благодаря тому, что в конце рабочего хода инерционного тела восстанавливающая сила меняет свое направление, происходит прощелкивание пологой арки. При этом арка скачкообразно переходит из одного устойчивого состояния в другое. Установление факта превышения ускорением заданной величины осуществляется либо визуально, по положению инерционного тела, либо путем опроса состояния электрического контакта, который замыкается аркой в конечном положении чувствительного элемента.
Основным недостатком конструкций датчиков, в которых использован эффект прощелкивания пологой арки, является зависимость силовой характеристики арки от условий ее нагружения (см. Р.Гилмор. Прикладная теория катастроф: В 2-книгах. Кн.1. М.: Мир, 1984, стр.252), так как прощелкивание арки происходит при условии образования форм высших гармоник, которые могут отличаться в зависимости от характера нагружения или места приложения нагрузки. Для получения стабильного порога по ускорению срабатывания необходимо конструктивно обеспечить точную симметрию расположения концов пологой арки относительно точки приложения нагрузки и одинаковую жесткость к изгибу ее концов. Кроме того, при перемещении инерционного тела, особенно при боковых нагрузках, возникают силы трения скольжения, которые необходимо свести к минимуму.
При действии на датчик ударных ускорений, которые, как правило, носят характер затухающих колебаний, необходимо принять дополнительные меры для исключения возврата инерционного тела в исходное состояние при действии ускорений обратной направленности, так как при возвращении инерционного тела в исходное состояние информация о превышении ускорением заданной величины, по показаниям датчика, будет искажена.
В реальной конструкции датчика для выполнения этих условий необходимо принять ряд конструктивных мер, которые приведут к усложнению конструкции датчика и, как следствие, к удорожанию его изготовления.
Для того чтобы изменение формы пологой арки при прощелкивании происходило по определенному закону, необходимо конструктивно обеспечить нагружение арки не в центральной части, а в зоне перегиба, который образуется в случае неподвижного закрепления концов арки в корпусе для формирования требуемой высоты подъема центральной части. А для исключения сил трения при перемещении инерционного тела целесообразно функции инерционного тела и упругого элемента совместить в одной детали, которая будет являться чувствительным элементом датчика.
Наиболее близким к данной схеме построения является «Механический акселерометр» по А.с. №156781, класс G01c, опубл. в «Бюллетене изобретений и товарных знаков» №16 за 1963 г., который выбран в качестве прототипа. Механический акселерометр содержит в качестве чувствительного элемента пластинчатую пружину с грузом, имеющую два устойчивых положения. Концы пружины закреплены в корпусе акселерометра в изогнутом состоянии, а груз смещен от оси симметрии к одному из концов пружины. Груз размещен на линии перегиба и неподвижно закреплен на пружине (припаян).
К главным недостаткам прототипа можно отнести то, что пластинчатая пружина с грузом на линии перегиба в исходном положении чувствительного элемента образует динамическую систему, которая является колебательной. Реакция колебательной системы на ударные импульсы произвольной формы может отличаться в зависимости от темпа нарастания ускорения. Поскольку любая механическая колебательная система характеризуется наличием частот, при которых возможно возникновение резонанса, то в условиях вибронагружений возникновение резонанса может приводить к дребезгу пружины и, соответственно, потере устойчивости датчика и ложным срабатываниям (Ю.И.Иориш, Виброметрия, Москва, ГНТИ, 1963 г., стр.463).
Кроме того, необходимо обеспечить установку груза как можно точнее на линии перегиба, а зона размещения груза должна быть минимальной, так как в противном случае установка груза изменит в месте его установки жесткость пружины на изгиб, что повлечет за собой ухудшение точностных характеристик датчика.
Так как груз закреплен на пружине, при действии ускорений обратной направленности возможен возврат чувствительного элемента датчика в исходное положение.
Задачей заявляемого изобретения является создание датчика предельных ускорений, регистрирующего с повышенной точностью заданные уровни ускорений с достоверным запоминанием информации о факте превышения ускорением заданной величины, в том числе при действии ударных импульсов произвольной формы.
Технические результаты, достигаемые при реализации изобретения, заключаются в повышении точности срабатывания датчика при действии ускорений, в том числе ударных импульсов произвольной формы, а также повышении достоверности информации о факте превышения ускорениями предельных уровней.
Это достигается тем, что в датчике предельных ускорений, содержащем чувствительный элемент в виде пластинчатой пружины с закрепленными в корпусе концами, установленный с возможностью перехода из одного устойчивого положения в другое путем прощелкивания, новым является то, что чувствительный элемент в исходном положении имеет S-образную форму, образованную в результате его взаимодействия с упором, размещенным в корпусе.
Выполнение чувствительного элемента в виде пластинчатой пружины, установленной с возможностью перехода из одного устойчивого положения в другое путем прощелкивания и имеющей в исходном положении S-образную форму, обеспечивает чувствительному элементу силовую характеристику (зависимость обобщенной восстанавливающей силы от перемещения центра масс пружины), на которой есть участок, где происходит уменьшение силы, но при этом вектор обобщенной восстанавливающей силы не меняет своего направления. Указанный участок силовой характеристики и используется для обеспечения требуемого порога по ускорению срабатывания путем выбора положения чувствительного элемента относительно корпуса с помощью упора, размещенного в корпусе с возможностью контактирования с чувствительным элементом в одной из зон, где кривизна изогнутой пружины максимальна, а выпуклость участка чувствительного элемента обращена в сторону, где чувствительный элемент находится в конечном положении. Так как величина обобщенной восстанавливающей силы в зависимости от перемещения чувствительного элемента уменьшается, то обобщенный коэффициент жесткости его как упругого элемента на участке рабочего хода имеет отрицательное значение. Поэтому динамическая система датчика является неколебательной, благодаря чему достигается повышение точности срабатывания датчика при действии ускорений, в том числе ударных импульсов произвольной формы.
Для точной настройки порога по ускорению срабатывания упор целесообразно выполнять, например, в виде винта, который после настройки требуемого порога по ускорению срабатывания контрится.
Так как пластинчатая пружина, являясь чувствительным элементом, совмещает в себе функции упругого элемента и инерционного тела, то при перемещении чувствительного элемента практически отсутствуют силы трения, за исключением внутреннего трения в материале пружины, которым можно пренебречь. Это также способствует повышению точности датчика предельных ускорений.
Благодаря тому, что в исходном положении чувствительный элемент имеет S-образную форму, переход из конечного положения в исходное при действии ударных ускорений обратной направленности невозможен, так как для восстановления исходной формы чувствительного элемента необходимо воздействие ударного импульса со строго определенным сочетанием параметров (амплитуды, длительности и направления вектора ускорения), вероятность реализации которого в реальных условиях практически равна нулю. Кроме того, в исходном положении чувствительного элемента потенциальная энергия, накопленная в изогнутых участках пластинчатой пружины, больше потенциальной энергии изгиба в конечном положении чувствительного элемента, что также усложняет возврат чувствительного элемента в исходное положение. Невозможность возвращения чувствительного элемента в исходное положение повышает достоверность запоминания факта действия ускорения, то есть зарегистрированной информации.
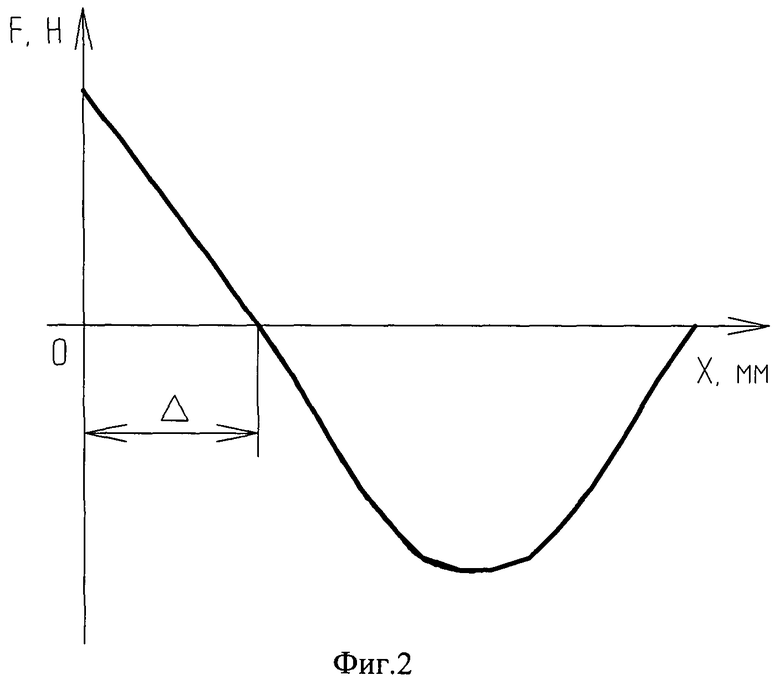
На фиг.1 изображена схема исполнения датчика предельных ускорений,
на фиг.2 - вид силовой характеристики чувствительного элемента.
Датчик предельных ускорений содержит в качестве чувствительного элемента пластинчатую пружину 1, концы которой закреплены в корпусе 2. В исходном положении пружина 1 имеет S-образную форму, которая обеспечивается благодаря взаимодействию ее с упором 3 (показан условно), размещенным в корпусе 2 датчика.
Пружина 1 имеет два устойчивых положения: а - исходное, б - конечное (см. фиг.1).
Пластинчатая пружина 1 изготавливается из тонкой упругой, как правило, металлической ленты прямоугольного сечения. До сборки датчика пружина имеет прямолинейную форму. При закреплении концов пружины 1 в корпусе 2 датчика и благодаря взаимодействию с упором 3 чувствительный элемент приобретает S-образную форму.
Упор 3 выполняется, например, в виде винта для осуществления точной настройки датчика на требуемую величину порога по ускорению срабатывания.
Изображенная на фиг.2 качественная характеристика восстанавливающей силы чувствительного элемента датчика имеет участок, где обобщенный коэффициент жесткости отрицательный. Данный участок протяженностью Δ представляет собой рабочий ход чувствительного элемента датчика, при этом отношение величины восстанавливающей силы к массе подвижного участка пластинчатой пружины в исходном положении чувствительного элемента определяет порог по ускорению срабатывания датчика. На графике видно, что восстанавливающая сила меняет направление на противоположное после того, как чувствительный элемент переместится на величину рабочего хода Δ. Благодаря этому чувствительный элемент не возвращается из конечного положения в исходное. Поэтому факт действия ускорения можно определить по положению чувствительного элемента в течение времени сколь угодно продолжительного после непосредственного действия ускорения на датчик.
Контролировать положение чувствительного элемента с целью определения факта срабатывания датчика предельных ускорений целесообразно визуально. Для этого корпус датчика должен быть изготовлен из прозрачного материала, например, ударопрочного полистирола.
Положения чувствительного элемента можно контролировать путем опроса состояния электрических контактов, установленных соответственно в исходном и конечном положениях. В этом случае целесообразно использовать пластинчатую пружину из электропроводящего материала в качестве подвижного электрического контакта, в качестве контакта исходного положения чувствительного элемента использовать упор, выполненный из металла, а контакт конечного положения необходимо разместить в зоне максимального подъема пластинчатой пружины в ее конечном положении.
Датчик работает следующим образом.
Под действием ускорения, величина которого превышает порог по ускорению срабатывания, чувствительный элемент 1 датчика, имея в исходном положении S-образную форму, отрывается от упора, перемещается на величину рабочего хода Δ и затем, благодаря смене направления вектора восстанавливающей силы, чувствительный элемент 1 прощелкивается в конечное положение. Таким образом, при срабатывании датчика его чувствительный элемент переходит из одного устойчивого положения в другое.
Проведенные испытания макетных образцов датчика предельных ускорений, выполненного в соответствии с изобретением, подтвердили достижение заявляемых технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2014 |
|
RU2580902C1 |
| ДАТЧИК УСКОРЕНИЯ | 1999 |
|
RU2192645C2 |
| ИНЕРЦИОННЫЙ ПОРОГОВЫЙ ДАТЧИК | 2010 |
|
RU2443979C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2017 |
|
RU2669014C1 |
| ДАТЧИК ПРЕДЕЛЬНОГО УСКОРЕНИЯ | 1995 |
|
RU2106641C1 |
| ДАТЧИК УДАРНЫХ УСКОРЕНИЙ | 2023 |
|
RU2806247C1 |
| ИНЕРЦИОННЫЙ ДАТЧИК | 2012 |
|
RU2522895C2 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2020 |
|
RU2754918C1 |
| ПОРОГОВЫЙ ДАТЧИК ИНЕРЦИОННОГО ТИПА | 2021 |
|
RU2768012C1 |
| ИНЕРЦИОННЫЙ ДАТЧИК | 2021 |
|
RU2760150C1 |
Изобретение относится к области приборостроения, а именно - к инерционным датчикам порогового действия, осуществляющим регистрацию и запоминание в автономном режиме (без источника электропитания) информации о достижении ускорением заданных предельных уровней. Датчик содержит чувствительный элемент в виде пластинчатой пружины с закрепленными в корпусе концами, установленный с возможностью перехода из одного устойчивого положения в другое путем прощелкивания. В исходном положении чувствительный элемент имеет S-образную форму, образованную в результате его взаимодействия с упором, размещенным в корпусе. Изобретение позволяет повысить точность срабатывания датчика при действии ускорений, в том числе ударных импульсов произвольной формы, и повысить достоверность информации о факте превышения ускорениями предельных уровней. 2 ил.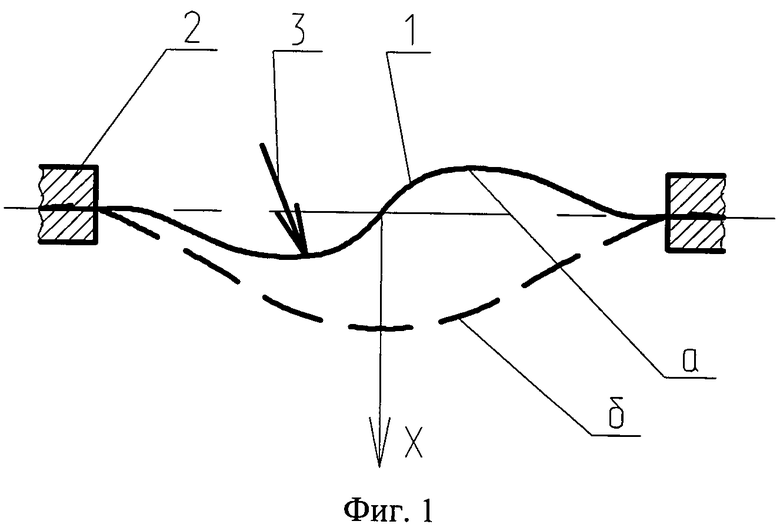
Датчик предельных ускорений, содержащий чувствительный элемент в виде пластинчатой пружины с закрепленными в корпусе концами, установленный с возможностью перехода из одного устойчивого положения в другое путем прощелкивания, отличающийся тем, что чувствительный элемент в исходном положении имеет S-образную форму, образованную в результате его взаимодействия с упором, размещенным в корпусе.
| 0 |
|
SU156781A1 | |
| US 4789762 А, 06.12.1988 | |||
| ДАТЧИК ПРЕДЕЛЬНОГО УСКОРЕНИЯ | 1995 |
|
RU2106641C1 |
| ДАТЧИК ПРЕДЕЛЬНЫХ УСКОРЕНИЙ | 2001 |
|
RU2216026C2 |
| US 4361106 А, 30.11.1982. | |||

