Изобретение относится к лазерной технике, а именно к лазерной дальнометрии.
Известны локационные способы измерения дальности до удаленных объектов. Известен способ измерения дальности до цели, включающий посылку на цель лазерного импульса S0(t, t0), регистрацию момента посылки t0, прием отраженного целью излучения S(t, tD), регистрацию момента приема tD и определение временного интервала τ=tD-t0, по которому судят о дальности D до цели [1] по формуле D=сτ/2, где с - скорость света. Согласно этому способу регистрацию момента приема отраженного сигнала (временную привязку) производят в момент превышения сигналом заданного порога (привязка по фронту сигнала). При таком способе погрешность временной привязки велика - порядка длительности фронта принятого сигнала [2]. Другим недостатком описанного в [1] способа является невысокая точность определения временного интервала τ, поскольку в измерителях первого поколения использовались аналоговые методы измерения временных интервалов.
Наиболее близким по технической сущности к предлагаемому способу является способ измерения дальности, включающий формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0(t, t0) длительностью ts>T, форма которого соответствует заданной последовательности его выборочных значений S0i, зарегистрированной в массиве {S0i}, прием отраженного целью сигнала S(t, tD), его оцифровку путем определения и регистрации массива его выборочных значений {Sj} относительно тактовой последовательности, определение временного положения принятого сигнала относительно зондирующего сигнала путем сравнения массивов выборочных значений зондирующего и принятого сигналов, причем t - текущее время, t0 - момент излучения зондирующего сигнала, tD - момент приема отраженного целью сигнала, i=1…K - порядковый номер выборки зондирующего сигнала S0i относительно тактовой последовательности, К=ts/T - количество выборок зондирующего сигнала, j=1…Jmax - порядковый номер выборки принятого сигнала Sj относительно тактовой последовательности, Jmax=2Dmax/cT - количество выборок принятого сигнала; Dmax - максимальная измеряемая дальность, с - скорость света [3].
В указанном источнике сравнение массивов {S0i} и {Sj} производят путем последовательного сдвига массива {Sj} на р=1, 2 …Jmax шагов, соответствующих шагу Т тактовой последовательности, и определения на каждом шаге коэффициента корреляции  . Значение Р, при котором корреляционная зависимость R(P) принимает максимальное значение, считают соответствующим временному положению принятого сигнала и определяют дальность до цели по формуле D=сРТ/2, где с - скорость света.
. Значение Р, при котором корреляционная зависимость R(P) принимает максимальное значение, считают соответствующим временному положению принятого сигнала и определяют дальность до цели по формуле D=сРТ/2, где с - скорость света.
При таком методе фиксации временного положения принятого сигнала S(t, tD), представленного массивом своих выборочных значений {Sj}, точность измерения дальности определяется дискретностью ячеек дальности d=сТ/2.
Задачей изобретения является повышение точности определения дальности.
Указанная задача решается за счет того, что в известном способе определения дальности, включающем формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0(t, t0) длительностью ts>T, форма которого соответствует заданной последовательности его выборочных значений S0i, зарегистрированной в массиве {S0i}, прием отраженного целью сигнала S(t, tD), его оцифровку путем определения и регистрации относительно тактовой последовательности массива его выборочных значений {Sj}, определение временного положения принятого сигнала относительно зондирующего сигнала путем сравнения массивов выборочных значений зондирующего и принятого сигналов, причем t - текущее время, t0 - момент излучения зондирующего сигнала, tD - момент приема отраженного целью сигнала, i=1…K - порядковый номер выборки зондирующего сигнала S0i относительно тактовой последовательности, К=ts/T - количество выборок зондирующего сигнала, j=1…Jmax - порядковый номер выборки принятого сигнала Sj относительно тактовой последовательности, Jmax=2Dmax/cT - количество выборок принятого сигнала, Dmax - максимальная измеряемая дальность, с - скорость света, момент генерации зондирующего сигнала синхронизируют с одним из импульсов тактовой последовательности, принимая его за начало отсчета, формируют и регистрируют W≥2 массивов выборочных значений {S0i}w зондирующего сигнала, где w=1…W - порядковый номер массива, путем формирования выборок с интервалом Т, причем в w-м массиве момент первой выборки сдвигают относительно начала отсчета на интервал δtw=(w-1)T/W, находят такой сдвиг p=Pw массива {Sj} относительно каждого из массивов {S0j}w, при котором степень их совпадения в наибольшей степени удовлетворяет заранее установленному критерию Rw(Pw), например минимуму суммарного абсолютного отклонения  где р=1, 2, …Pmax, Рmах=2Dmax/cT - максимальное число ячеек дальности, соответствующее максимальной измеряемой дальности Dmax, затем определяют номер w=Q массива выборочных значений зондирующего сигнала, для которого оценка Rw(p) в наибольшей степени соответствует установленному критерию, и судят о дальности D до цели по соотношению D=с(Р+(Q-1)/W)T/2+ΔD0, где с - скорость света, ΔD0 - постоянная величина, которую определяют предварительно путем калибровки на эталонной трассе для компенсации систематической ошибки.
где р=1, 2, …Pmax, Рmах=2Dmax/cT - максимальное число ячеек дальности, соответствующее максимальной измеряемой дальности Dmax, затем определяют номер w=Q массива выборочных значений зондирующего сигнала, для которого оценка Rw(p) в наибольшей степени соответствует установленному критерию, и судят о дальности D до цели по соотношению D=с(Р+(Q-1)/W)T/2+ΔD0, где с - скорость света, ΔD0 - постоянная величина, которую определяют предварительно путем калибровки на эталонной трассе для компенсации систематической ошибки.
Массивы {S0i}w можно формировать путем предварительной оцифровки зондирующего сигнала, заключающейся в пробном излучении зондирующего сигнала, его преобразовании в электрический сигнал, определении и регистрации его выборочных значений S0iw с периодом Т.
Массивы {S0i}w целесообразно размещать так, чтобы выборки с максимальным значением имели одинаковый порядковый номер во всех массивах.
Для быстрого определения оптимального массива с номером w=Q в массиве {Sj} определяют порядковый номер выборки с максимальным значением и совмещают массивы выборочных значений зондирующего {S0i}w и принятого {Sj} сигналов путем совмещения выборок, имеющих максимальные значения.
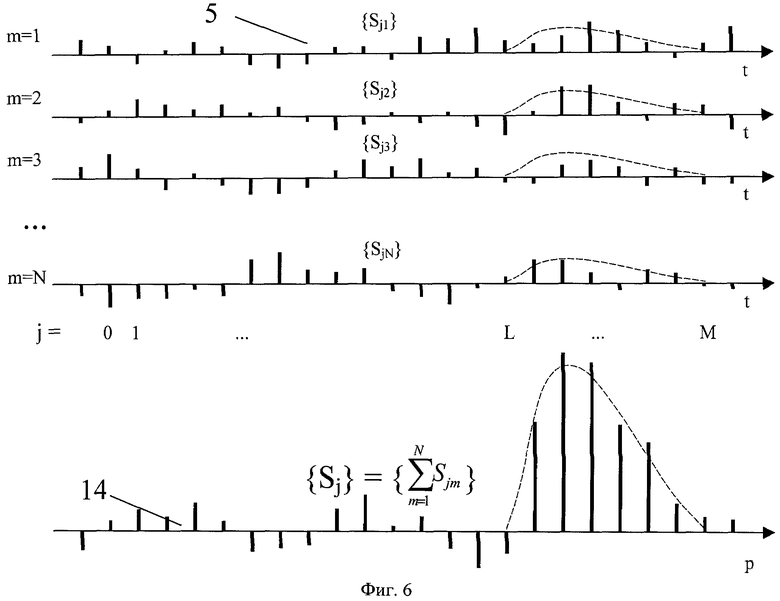
Зондирование цели можно производить многократно, а массив выборочных значений принятого сигнала в каждой j-й позиции формировать в виде суммы  выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
На Фиг.1 представлена временная диаграмма процесса зондирования, его привязки к тактовой частоте и формирования массивов {S0i} и {Sj}. Фиг.2 иллюстрирует формирование функции  На Фиг.3 показаны зависимости вида
На Фиг.3 показаны зависимости вида  и
и  полученные при воздействии шума. Фиг.4 иллюстрирует принцип формирования массивов {S0i}w=1 и {S0i}w=2. На фиг.5 представлены результаты формирования функций
полученные при воздействии шума. Фиг.4 иллюстрирует принцип формирования массивов {S0i}w=1 и {S0i}w=2. На фиг.5 представлены результаты формирования функций  при моделировании реального процесса измерения дальности. Фиг.6 поясняет процесс накопления данных при многократном зондировании.
при моделировании реального процесса измерения дальности. Фиг.6 поясняет процесс накопления данных при многократном зондировании.
В момент времени t0 в направлении цели посылают зондирующий импульс S0(t, t0) 1, представленный массивами своих выборочных значений {S0i}w. Один из таких массивов 2 показан на фиг.1. Затем принимают отраженный целью импульс S(t, tD) 3. Момент t0 излучения зондирующего импульса 1 привязан к тактовой последовательности 4 путем присвоения импульсу тактовой последовательности, совпадающему с моментом t0, порядкового номера i=0. Тактовые импульсы генерируют с помощью высокостабильного источника с частотой FT=1/Т, где Т - период следования тактовых импульсов. Массивы {S0i}w можно формировать путем предварительной оцифровки зондирующего сигнала, заключающейся в пробном излучении зондирующего сигнала, его преобразовании в электрический сигнал, определении и регистрации его выборочных значений S0iw с периодом Т. Массивы 2 сохраняют в памяти системы и обновляют их в процессе подготовки к измерениям каждый раз, когда это требуется по условиям метрологической калибровки. Принятый сигнал 3 оцифровывают путем определения его выборочных значений S(j) в моменты генерации каждого j-го тактового импульса; нумерация отсчетов S(j) ведется от тактового импульса с номером j=0, совпадающего с моментом t0. Полученные выборочные значения сохраняют в массиве {Sj} 5, хранящемся в памяти системы. Массивы {S0i}w и {Sj} нормируют так, чтобы их выборки с максимальными значениями были равны. При этом минимизируется вредное влияние шумов и динамических искажений на последующую обработку данных. После нормировки формируют для каждого из массивов {S0i}w оценочную функцию R(p) 6 путем последовательной генерации чисел р=1, 2, …Рmах и определения для каждого p величины  ,
,  или иной функциональной зависимости, отражающей степень совпадения формы переданного и принятого сигналов, содержащейся в массивах {S0i}w и {Sj}, где р=1, 2, …, Рmах - номер ячейки дальности; Рmах=2Dmax/cT - количество ячеек дальности, Dmax - максимальная измеряемая дальность, с - скорость света. На фиг.3а) показана зависимость вида
или иной функциональной зависимости, отражающей степень совпадения формы переданного и принятого сигналов, содержащейся в массивах {S0i}w и {Sj}, где р=1, 2, …, Рmах - номер ячейки дальности; Рmах=2Dmax/cT - количество ячеек дальности, Dmax - максимальная измеряемая дальность, с - скорость света. На фиг.3а) показана зависимость вида  (6), а на фиг.3б) - зависимость вида
(6), а на фиг.3б) - зависимость вида  (7). Затем для каждого массива {S0i}w определяют номер ячейки Р=p(Rmin), соответствующей оптимальному значению критерия (минимальному для зависимости 6 и максимальному для зависимости 7), и номер w=Q массива выборочных значений зондирующего сигнала, для которого оценка Rw(p) в наибольшей степени соответствует установленному критерию. Если в массивах {S0i}w выборка с максимальным значением находится в одной и той же позиции, то значение Р одинаково для всех массивов, и поиск оптимального массива {S0i}w может быть ускорен путем совмещения максимальных выборок {Sj} с максимальными выборками каждого из массивов {S0i}w и вычисления Rw(p) при сдвиге p=Р, соответствующем такому совмещению без построения всей кривой Rw(p). После определения оптимальных значений Р и Q вычисляют дальность D до цели по формуле D=с(Р+(Q-1)/W)T/2+ΔD0, где с - скорость света, W - количество массивов {S0i}w, Т - период тактовой частоты, ΔD0 - поправка, определяемая предварительно при калибровке измерителя на эталонной дистанции.
(7). Затем для каждого массива {S0i}w определяют номер ячейки Р=p(Rmin), соответствующей оптимальному значению критерия (минимальному для зависимости 6 и максимальному для зависимости 7), и номер w=Q массива выборочных значений зондирующего сигнала, для которого оценка Rw(p) в наибольшей степени соответствует установленному критерию. Если в массивах {S0i}w выборка с максимальным значением находится в одной и той же позиции, то значение Р одинаково для всех массивов, и поиск оптимального массива {S0i}w может быть ускорен путем совмещения максимальных выборок {Sj} с максимальными выборками каждого из массивов {S0i}w и вычисления Rw(p) при сдвиге p=Р, соответствующем такому совмещению без построения всей кривой Rw(p). После определения оптимальных значений Р и Q вычисляют дальность D до цели по формуле D=с(Р+(Q-1)/W)T/2+ΔD0, где с - скорость света, W - количество массивов {S0i}w, Т - период тактовой частоты, ΔD0 - поправка, определяемая предварительно при калибровке измерителя на эталонной дистанции.
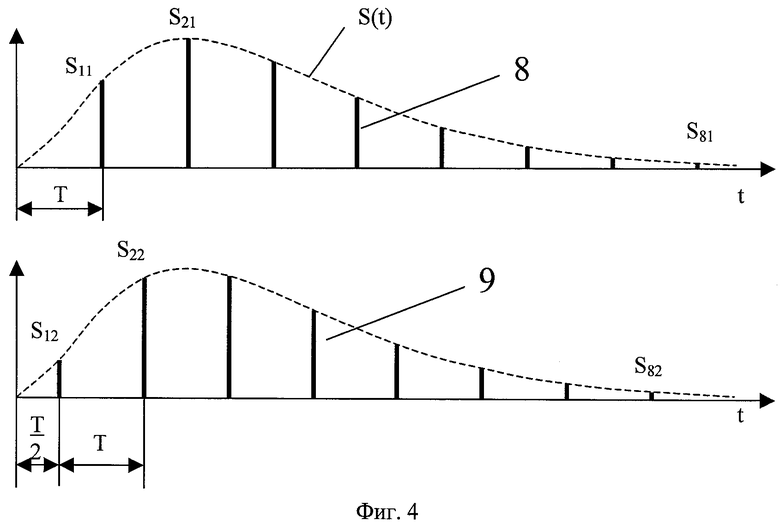
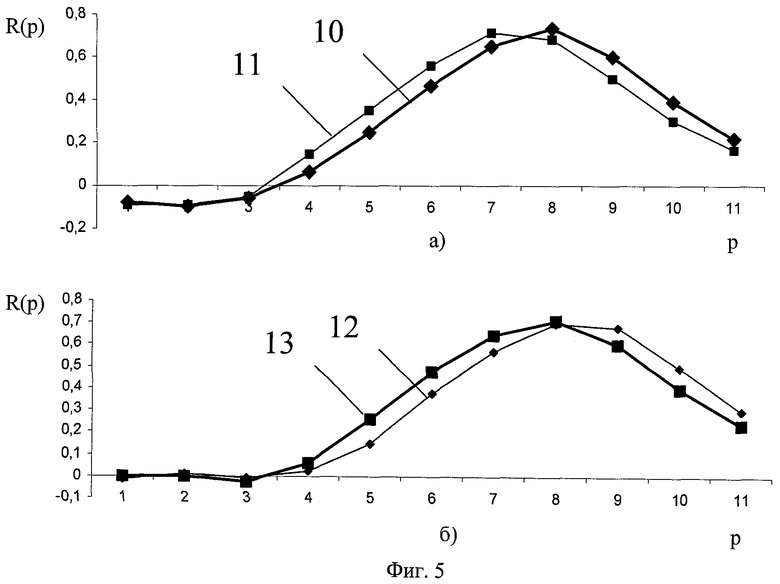
На фиг.4 представлен пример формирования массивов {S0i}1 8 и {S0i}2 9 при W=2 и, соответственно, при сдвиге выборочных значений второго массива относительно первого на δtw=(w-1)T/W=δt2=(2-1)T/2=Т/2. В каждом из этих массивов содержится по восемь выборок зондирующего сигнала, причем выборки с максимальным значением приходятся в обоих случаях на вторую позицию (S21 и S22). На фиг.5а) и 5б) показаны результаты обработки данных при сдвиге сигнала S(t, tD) 3 на время tD=8Т (фиг.5а) и tD=8,5Т (фиг.5б). В обоих случаях сигнал искажен аддитивным нормальным шумом со средним значением, равным нулю, и среднеквадратическим отклонением σ=0,1 от максимального значения (амплитуды) сигнала S(t). Оценку положения сигнала производят с помощью массивов 8 и 9 путем формирования функции  определения позиции Р ее максимума и определения номера массива w=Q с максимальным значением Rw(P). Кривые 10 и 11 построены соответственно с помощью массивов 8 и 9. Аналогично, массивам 8 и 9 соответствуют кривые 12 и 13. На фиг.5а) максимум критерия Rw(P) обеспечивается для функции 10, для которой Q=1, в позиции Р=8. Тогда оценка задержки tD сигнала в этом случае составляет tD=(Р+(Q-1)/W)T=(8+(1-1)/2)Т=8Т. На фиг.5б) максимум критерия Rw(P) обеспечивается для функции 13, для которой Q=2, в позиции Р=8. Тогда оценка задержки tD сигнала в этом случае составляет tD=(8+(2-1)/2)Т=8,5Т. Обе оценки соответствуют истинным значениям задержки.
определения позиции Р ее максимума и определения номера массива w=Q с максимальным значением Rw(P). Кривые 10 и 11 построены соответственно с помощью массивов 8 и 9. Аналогично, массивам 8 и 9 соответствуют кривые 12 и 13. На фиг.5а) максимум критерия Rw(P) обеспечивается для функции 10, для которой Q=1, в позиции Р=8. Тогда оценка задержки tD сигнала в этом случае составляет tD=(Р+(Q-1)/W)T=(8+(1-1)/2)Т=8Т. На фиг.5б) максимум критерия Rw(P) обеспечивается для функции 13, для которой Q=2, в позиции Р=8. Тогда оценка задержки tD сигнала в этом случае составляет tD=(8+(2-1)/2)Т=8,5Т. Обе оценки соответствуют истинным значениям задержки.
Таким образом, при использовании двух массивов {S0i} дискретность определения задержки сигнала уменьшена до Т/2. Аналогично, при увеличении количества W массивов {S0i} дискретность оценки задержки уменьшается до Т/W.
Практически нет необходимости строить зависимости Rw(p). Достаточно совместить максимальные выборки {Sj} и каждого из массивов {S0i}w, определить значения критерия Rw при таком совмещении и определить номер Q массива с наилучшим значением Rw=Q.
Точность измерения дальности может быть значительно увеличена методом накопления [5] за счет увеличения эффективного отношения сигнал/шум путем многократного зондирования цели и формирования массива 14 выборочных значений принятого сигнала в каждой j-й позиции в виде суммы  выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
Для повышения устойчивости к шумам и помехам можно формировать критерий совпадения массивов в виде функции  минимальное значение которой соответствует наилучшему совпадению массивов {S0i}w и {Sj}. Из фиг.3 видно, что такая зависимость 6 имеет более острый экстремум по сравнению с корреляционной зависимостью 7. Это снижает вероятность ошибки при воздействии возмущающих воздействий.
минимальное значение которой соответствует наилучшему совпадению массивов {S0i}w и {Sj}. Из фиг.3 видно, что такая зависимость 6 имеет более острый экстремум по сравнению с корреляционной зависимостью 7. Это снижает вероятность ошибки при воздействии возмущающих воздействий.
Предлагаемый способ реализован в экспериментальном образце лазерного дальномера со следующими характеристиками. Тактовая частота FT=25 МГц (тактовый период Т=40 нс, что соответствует дискретности по дальности ΔD=6 м). Количество массивов {S0i} W=100. Критерий  вычисляется в одной точке - в ячейке дальности p=Р, соответствующей совпадению максимальных выборок массивов {S0i} и {Sj}. Максимальные выборки всех массивов {S0i}w находятся во 2-й позиции, а общее количество выборок К=5. Дальномер работает в режиме накопления с частотой зондирований 8000 Гц. Объем накопления N устанавливается автоматически в зависимости от величины отраженного сигнала - от N=128 при сильном сигнале до N=8000 при слабом сигнале. Среднеквадратичная ошибка измерения дальности не превышает 0,06 м. У известных дальномеров ошибка измерения в десятки раз больше этой величины.
вычисляется в одной точке - в ячейке дальности p=Р, соответствующей совпадению максимальных выборок массивов {S0i} и {Sj}. Максимальные выборки всех массивов {S0i}w находятся во 2-й позиции, а общее количество выборок К=5. Дальномер работает в режиме накопления с частотой зондирований 8000 Гц. Объем накопления N устанавливается автоматически в зависимости от величины отраженного сигнала - от N=128 при сильном сигнале до N=8000 при слабом сигнале. Среднеквадратичная ошибка измерения дальности не превышает 0,06 м. У известных дальномеров ошибка измерения в десятки раз больше этой величины.
Предлагаемый способ измерения дальности по сравнению с известными способами обеспечивает значительно более точную оценку положения отраженного сигнала по массиву его выборочных значений в условиях воздействия шумов, в том числе при многократном зондировании и накоплении данных. В результате обеспечивается существенное повышение точности определения дальности до цели.
Источники информации
1. В.А.Волохатюк, В.М.Кочетков, P.P.Красовский. Вопросы оптической локации. М.: Советское радио, 1971 г., с.176.
2. Е.А.Мелешко. Интегральные схемы в наносекундной ядерной электронике. М.: Атомиздат, 1977, с.77.
3. United States Patent No 5805468, September 8, 1998, Method and apparatus for determining the light transit time over a measurement path arranged between a measuring apparatus and a reflecting object. - Прототип.
4. B.E.Гмурман. Теория вероятностей и математическая статистика. М.: Высшая школа, 1977.
5. Я.Д.Ширман, В.Н.Манжос. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2011 |
|
RU2469269C2 |
| СПОСОБ НЕКОГЕРЕНТНОГО НАКОПЛЕНИЯ СВЕТОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2455615C1 |
| СПОСОБ ВРЕМЕННОЙ ПРИВЯЗКИ ИМПУЛЬСНОГО СВЕТОЛОКАЦИОННОГО СИГНАЛА | 2011 |
|
RU2451950C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННОГО ИНТЕРВАЛА | 2011 |
|
RU2451962C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2563608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2014 |
|
RU2562148C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА | 2014 |
|
RU2563607C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ | 2014 |
|
RU2562147C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2562150C1 |


Способ включает формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0 длительностью ts>Т, при этом момент генерации зондирующего сигнала синхронизируют с одним из импульсов тактовой последовательности, принимая его за начало отсчета. Форма зондирующего сигнала соответствует заданной последовательности его выборочных значений S0i, взятых с интервалом Т, зарегистрированной в массиве {S0i}. При этом формируют и регистрируют W≥2 массивов выборочных значений {S0i}w зондирующего сигнала, где w=1…W - порядковый номер массива, причем в w-м массиве момент первой выборки сдвигают относительно начала отсчета на интервал δtw=(w-1)T/W. Осуществляют прием отраженного сигнала S, его оцифровку путем определения и регистрации относительно тактовой последовательности массива его выборочных значений {Sj}, находят такой сдвиг р=Pw массива {Sj} относительно каждого из массивов {S0j}w, при котором степень их совпадения в наибольшей степени удовлетворяет заранее установленному критерию Rw(Pw). Затем определяют номер w=Q массива выборочных значений зондирующего сигнала, для которого оценка Rw(p) в наибольшей степени соответствует установленному критерию, и судят о дальности D до цели по соотношению D=с(Р+(Q-1)/W)T/2+ΔD0, где с - скорость света, ΔD0 - величина, которую определяют путем калибровки на эталонной трассе для компенсации систематической ошибки. Технический результат заключается в повышении точности определения дальности. 4 з.п. ф-лы, 6 ил.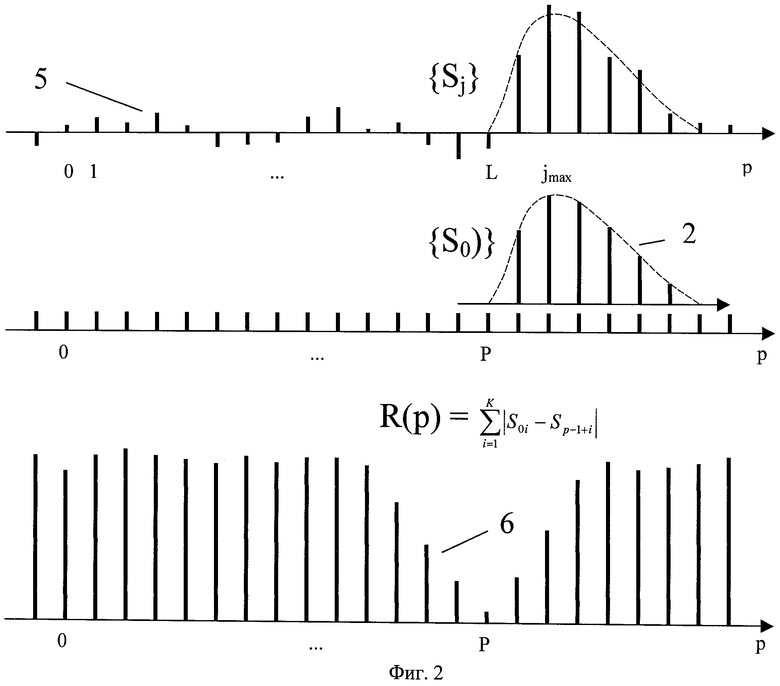
1. Способ измерения дальности, включающий формирование времязадающей тактовой последовательности импульсов с периодом Т, генерацию и посылку на цель зондирующего сигнала S0(t, t0) длительностью ts>T, форма которого соответствует заданной последовательности его выборочных значений S0i, зарегистрированной в массиве {S0i}, прием отраженного целью сигнала S(t, tD), его оцифровку путем определения и регистрации относительно тактовой последовательности массива его выборочных значений {Sj}, определение временного положения принятого сигнала относительно зондирующего сигнала путем сравнения массивов выборочных значений зондирующего и принятого сигналов, где t - текущее время, t0 - момент излучения зондирующего сигнала, tD - момент приема отраженного целью сигнала, i=1…К - порядковый номер выборки зондирующего сигнала S0i относительно тактовой последовательности, К=ts/T - количество выборок зондирующего сигнала, j=1…Jmax - порядковый номер выборки принятого сигнала Sj относительно тактовой последовательности, Jmax=2Dmax/cT - количество выборок принятого сигнала, Dmax - максимальная измеряемая дальность, с - скорость света, отличающийся тем, что момент генерации зондирующего сигнала синхронизируют с одним из импульсов тактовой последовательности, принимая его за начало отсчета, формируют и регистрируют W≥2 массивов выборочных значений {S0i}w зондирующего сигнала, где w=1…W - порядковый номер массива, путем формирования выборок с интервалом Т, причем в w-ом массиве момент первой выборки сдвигают относительно начала отсчета на интервал δtw=(w-1)T/W, находят такой сдвиг р=Pw массива {Sj} относительно каждого из массивов {S0j}w, при котором степень их совпадения в наибольшей степени удовлетворяет заранее установленному критерию Rw(Pw), например, минимуму суммарного абсолютного отклонения  ,
,
где р=1, 2,… Рmах; Рmах=2Dmax/cT - максимальное число ячеек дальности, соответствующее максимальной измеряемой дальности Dmax, затем определяют номер w=Q массива выборочных значений зондирующего сигнала, для которого оценка Rw(p) в наибольшей степени соответствует установленному критерию, и судят о дальности D до цели по соотношению D=c(P+(Q-1)/W)T/2+ΔD0, где с - скорость света, ΔD0 - постоянная величина, которую определяют предварительно путем калибровки на эталонной трассе для компенсации систематической ошибки.
2. Способ по п.1, отличающийся тем, что массивы {S0i}w формируют путем предварительной оцифровки зондирующего сигнала, заключающейся в пробном излучении зондирующего сигнала, его преобразовании в электрический сигнал, определении и регистрации его выборочных значений S0iw с периодом Т.
3. Способ по п.1, отличающийся тем, что массивы {S0i}w размещают так, чтобы выборки с максимальным значением имели одинаковый порядковый номер во всех массивах.
4. Способ по п.1 или 3, отличающийся тем, что в массиве {Sj} определяют порядковый номер выборки с максимальным значением и совмещают массивы выборочных значений зондирующего {S0i}w и принятого {Sj} сигналов путем совмещения выборок, имеющих максимальные значения.
5. Способ по п.1, отличающийся тем, что зондирование цели производят многократно, а массив выборочных значений принятого сигнала в каждой j-й позиции формируют в виде суммы  выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
выборочных значений, получаемых при каждом зондировании, где m - порядковый номер зондирования, N - количество зондирований.
| US 5805468 А, 08.09.1998 | |||
| JP 2008145201 А, 26.06.2008 | |||
| Штамм молочнокислых бактерия 74-продуцент -глюкозоизомеразы | 1977 |
|
SU654682A1 |
| СПОСОБ НЕПРЕРЫВНОЙ РАЗЛИВКИ ФЕРРОСПЛАВА | 1997 |
|
RU2116864C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ РАДИОЛОКАЦИОННОЙ ОТРАЖАТЕЛЬНОЙ СПОСОБНОСТИ И ДОПЛЕРОВСКОГО СДВИГА ПОСРЕДСТВОМ ИМПУЛЬСНОГО РАДИОЛОКАТОРА | 1999 |
|
RU2249230C2 |

