Изобретение относится к области приборостроения, преимущественно к измерительной технике, основанной на лазерном излучении, и может быть использовано в робототехнике и на предприятиях, занимающихся разработкой, изготовлением и применением систем лазерной локации для определения местонахождения объекта на плоскости.
Известен способ лазерной локации, при котором облучают определяемый объект лазерным излучением, принимают лазерное излучение приемником, преобразуют лазерное излучение в электрический сигнал, производят обработку и анализ электрического сигнала и по результатам анализа этого сигнала определяют координаты каждой точки поверхности контролируемого объекта (заявка на изобретение №2001117241, G01B 11/24, опубликована в 2003 г.) В данном способе лазер устанавливается на поворотной платформе, а лазерное излучение направляется на объект под разными углами, при этом для определения координат каждой точки поверхности контролируемого объекта необходимо измерять углы поворотной платформы, на которой устанавливают лазер. Погрешность измерения этих углов сильно влияет на точность определения координат каждой точки поверхности контролируемого объекта. Недостаток данного способа заключается в невысокой точности определения местоположения объекта, обусловленной сложностью точного определения углов установки платформы с лазером.
Известен также способ лазерной локации, включающий облучение определяемого объекта лазерным излучением, принятие лазерного излучения приемником, преобразование лазерного излучения в электрический сигнал, обработку и анализ электрического сигнала, по результатам которого определяют местоположение объекта (патент Российской Федерации №2296350, G01S 17/02, 2007 г.) Этот способ выбран в качестве прототипа предложенного решения.
В указанном способе объект облучают немодулированным лазерным излучением, излучение отражается объектом и водной поверхностью, над которой расположен объект, принимается приемником, расположенным вблизи источника лазерного излучения, преобразуется в электрический сигнал, по результатам обработки которого судят о координатах объекта относительно водной поверхности. Недостатком известного способа является невысокая точность определения местоположения объекта на плоскости, обусловленная тем, что принимают излучения не только от объекта, но и от бликов морской поверхности и статистически усредняют полученные результаты. Кроме того недостатком данного способа является невозможность применения его в робототехнике.
В предложенном изобретении ставится техническая задача создания такого способа лазерной локации, который бы обеспечивал высокую точность определения местоположения объекта на плоскости, что особенно важно для робототехники.
Указанный технический результат достигается тем, что в способе лазерной локации, включающим облучение определяемого объекта лазерным излучением, принятие лазерного излучения приемником, преобразование лазерного излучения в электрический сигнал, обработку и анализ электрического сигнала, по результатам которого определяют местоположение объекта. При облучении материального объекта лазерным излучением изменяют частоту лазерного излучения по пилообразному закону, разделяют лазерное излучение на две пары составляющих, преобразуют каждую составляющую лазерного излучения из прямого в рассеянное путем пропускания через диафрагму, располагают все диафрагмы в одной плоскости таким образом, чтобы оптические пути прохождения лазерного излучения от лазера до каждой из пары диафрагм были одинаковы, облучают определяемый объект рассеянным лазерным излучением от каждой пары диафрагм поочередно, располагают приемник на определяемом объекте, принимают приемником суммарный сигнал рассеянного лазерного излучения от каждой пары диафрагм и преобразуют его в электрический сигнал, производят обработку и анализ электрического сигнала, возникающего при воздействии рассеянного лазерного излучения поочередно от каждой пары диафрагм, по результатам анализа обработанных сигналов от каждой пары определяют две кривые всех возможных расположений объекта на плоскости, по точке пересечения которых и определяют действительное местоположение объекта на плоскости, проходящей через объект и диафрагмы.
Предлагаемый способ лазерной локации поясняется с помощью прилагаемых чертежей:
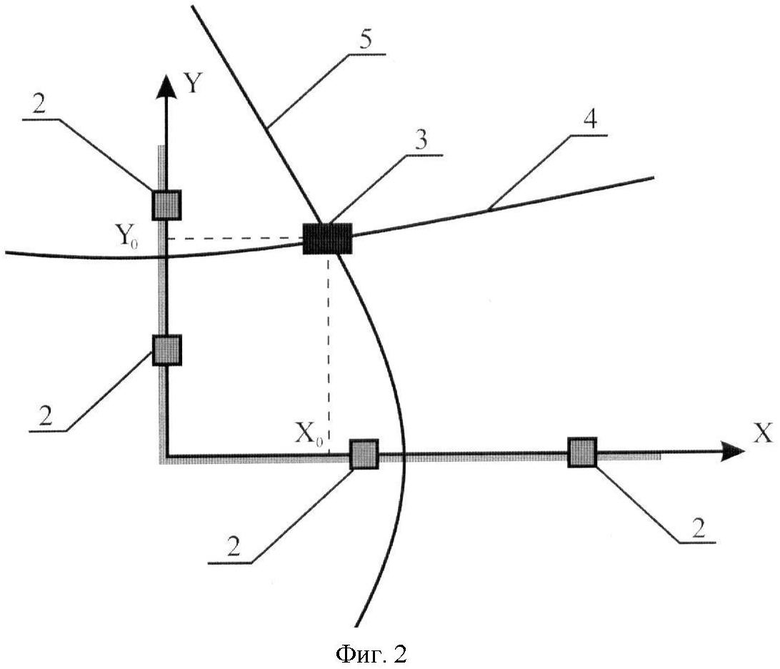
- на фиг.1 изображена схема взаимного расположения лазера, диафрагм и определяемого объекта;
- на фиг.2 изображены результаты обработки электрических сигналов, возникающих при воздействии рассеянного лазерного излучения поочередно от каждой пары диафрагм.
Сущность предлагаемого изобретения заключается в следующем.
В лазере 1 (фиг.1) излучение модулируется по пилообразному закону. Базовая частота излучения может быть выбрана в инфракрасном диапазоне, например, 200 ТГц, что соответствует длине волны примерно 1,5 мкм. При этом мы линейно наращиваем частоту на 100 ГГц за 1 мс.
Лазерное излучение разделяют на две пары составляющих, например с помощью полупрозрачных зеркал или призм, и направляют на диафрагмы 2, при этом оптические пути прохождения лазерного излучения от лазера до каждой из пары диафрагм выполняются одинаковыми.
Преобразуют каждую составляющую лазерного излучения из прямого в рассеянное путем пропускания через диафрагмы 2. При этом располагают все диафрагмы в одной плоскости. Две пары диафрагм могут быть образованы как четырьмя диафрагмами, так и тремя, если одна из них будет являться общей для обеих пар.
Приемник рассеянного лазерного излучения располагают на определяемом объекте 3. Производят облучение определяемого объекта рассеянным лазерным излучением от каждой пары диафрагм поочередно, поскольку излучение от одной пары диафрагм при данном способе локации не дает однозначного решения. При этом частота переключения рассеянного лазерного излучения от каждой пары диафрагм выбирается из условий обеспечения необходимой точности определения местоположения объекта. Например, при указанных выше параметрах модуляции лазерного излучения, частота переключения между парами источников должна составлять порядка секунд.
С помощью установленного на объекте приемника поочередно принимают суммарные сигналы рассеянного лазерного излучения от каждой пары диафрагм, которые преобразуют в электрические сигналы, например, с помощью фотоэлектрического преобразователя. Производят обработку и анализ электрического сигнала, возникающего при воздействии рассеянного лазерного излучения поочередно от каждой пары диафрагм.
В результате анализа обработанного сигнала через определение разности частот от каждой диафрагмы в паре, находится разность расстояний от определяемого объекта до диафрагм, координаты которых известны. По разности расстояний от определяемого объекта до диафрагм задает некую кривую 4 всех возможных расположений объекта на плоскости. Так как геометрическое место точек М Евклидовой плоскости, для которых абсолютное значение разности расстояний от М до двух выделенных точек F1 и F2 (называемых фокусами, в нашем случае это как раз и есть диафрагмы) постоянно - это гипербола, то указанная кривая имеет вид гиперболы, на которой находится определяемый объект, при облучении его рассеянным лазерным излучением от одной пары диафрагм. Путем облучения определяемого объекта рассеянным лазерным излучением от второй пары диафрагм, можно определить вторую кривую 5, также имеющую вид гиперболы, на которой находится определяемый объект и лежащей в той же плоскости. Точка пересечения этих кривых и дает координаты (X0, Y0) или действительное местоположение определяемого объекта на плоскости (фиг.2).
Заявленный способ лазерной локации может быть осуществлен в промышленности с применением освоенных современных технологий, материалов и процессов и может быть использован для определения местоположения объекта в робототехнике, станкостроении и машиностроении.
Предложенный способ лазерной локации не использует измерения углов, что приводит к увеличению погрешности определения местоположения определяемого объекта с увеличением расстояния от лазерного источника, позволяет повысить точность определения местоположения объекта на плоскости, которая не зависит в данном способе от расстояния между объектом и источником лазерного излучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ | 2011 |
|
RU2464590C1 |
| Способ определения параметров вращательного движения диффузно рассеивающих объектов | 1985 |
|
SU1283656A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЗАМИРАНИЯ АТМОСФЕРЫ | 2001 |
|
RU2194290C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| Способ дистанционного измерения средних размеров частиц аэрозоля | 1980 |
|
SU911232A1 |
| СПОСОБ ДОСТАВКИ НА ЦЕЛЬ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1987 |
|
SU1839888A1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2002 |
|
RU2223515C1 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| СПОСОБ ЛАЗЕРНОГО АТОМНО-ФЛУОРЕСЦЕНТНОГО АНАЛИЗА | 1989 |
|
SU1818958A1 |
Способ включает облучение определяемого объекта лазерным излучением, принятие лазерного излучения приемником, преобразование лазерного излучения в электрический сигнал, обработку и анализ электрического сигнала, по результатам которого определяют местоположение объекта. При облучении материального объекта лазерным излучением изменяют частоту лазерного излучения по пилообразному закону. Разделяют лазерное излучение на две пары составляющих, преобразуют каждую составляющую лазерного излучения из прямого в рассеянное пропусканием через диафрагму. Располагают все диафрагмы в одной плоскости таким образом, чтобы оптические пути прохождения лазерного излучения от лазера до каждой из пары диафрагм были одинаковы. Облучают определяемый объект рассеянным лазерным излучением от каждой пары диафрагм поочередно. Располагают приемник на определяемом объекте и принимают суммарный сигнал рассеянного лазерного излучения от каждой пары диафрагм. Преобразуют его в электрический сигнал, производят обработку и анализ. По результатам анализа обработанных сигналов от каждой пары определяют две кривые всех возможных расположений объекта на плоскости. По точке пересечения кривых определяют действительное местоположение объекта на плоскости, проходящей через объект и диафрагмы. Технический результат - обеспечение высокой точности определения местоположения объекта на плоскости. 2 ил.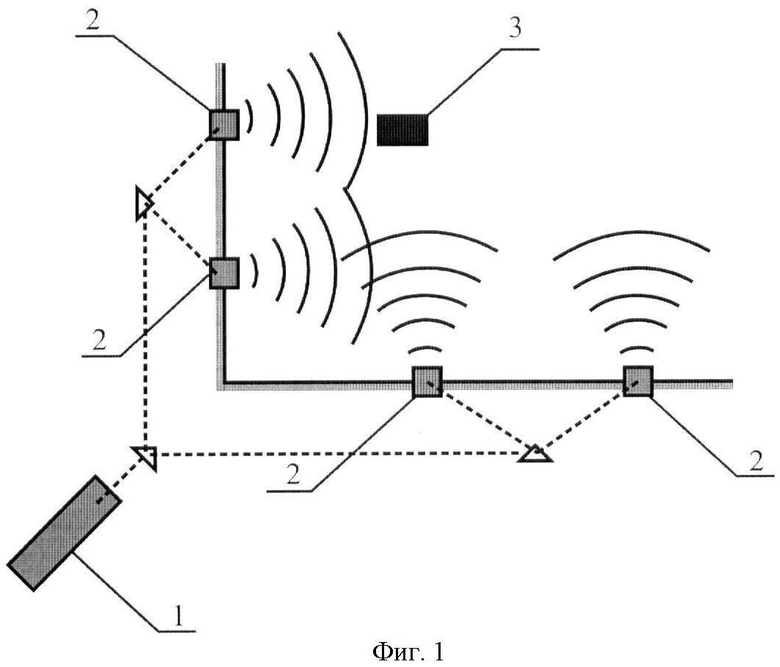
Способ лазерной локации, включающий облучение определяемого объекта лазерным излучением, принятие лазерного излучения приемником, преобразование лазерного излучения в электрический сигнал, обработку и анализ электрического сигнала, по результатам которого определяют местоположение объекта, отличающийся тем, что при облучении материального объекта лазерным излучением изменяют частоту лазерного излучения по пилообразному закону, разделяют лазерное излучение на две пары составляющих, преобразуют каждую составляющую лазерного излучения из прямого в рассеянное путем пропускания через диафрагму, располагают все диафрагмы в одной плоскости таким образом, чтобы оптические пути прохождения лазерного излучения от лазера до каждой из пары диафрагм были одинаковы, облучают определяемый объект рассеянным лазерным излучением от каждой пары диафрагм поочередно, располагают приемник на определяемом объекте, принимают приемником суммарный сигнал рассеянного лазерного излучения от каждой пары диафрагм и преобразуют его в электрический сигнал, производят обработку и анализ электрического сигнала, возникающего при воздействии рассеянного лазерного излучения поочередно от каждой пары диафрагм, по результатам анализа обработанных сигналов от каждой пары определяют две кривые всех возможных расположений объекта на плоскости, по точке пересечения которых и определяют действительное местоположение объекта на плоскости, проходящей через объект и диафрагмы.
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| EP 1381881 A1, 21.01.2004 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2224267C2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |

