Изобретение относится к области авиационного приборостроения, в частности к комплексам навигации и индикационным приборам отображения экипажу параметров состояния летательных аппаратов (ЛА).
В наиболее близком аналоге [Автономное Пилотажно-Навигационное Средство. Описание системы. Статья «Образная индикация», журнал «Вертолет» №2, 2005 г., стр.16-18] представлено Автономное Пилотажно-Навигационное Средство (ПНС-А), разработанное компанией ТеКнол на базе микромеханической бесплатформенной инерциальной навигационной системы, спутникового приемника, баровысотомера, магнитометра, дисплея и следующих вычислительно-логических блоков: блока комплексной обработки спутниковых данных и измерений датчиков, блока формирования маршрутов полета, блока синтеза 2D карты, блока синтеза 3D карты рельефа местности. ПНС-А обеспечивает определение параметров навигации и ориентации летательного аппарата, а также отображение данных параметров на экране индикатора в виде символов на фоне электронной карты или 3-мерной цифровой карты рельефа местности с использованием цветового кодирования в зависимости от высоты полета ЛА.
Недостатком наиболее близкого аналога являются ограниченные возможности по обеспечению безопасного пилотирования ЛА на малых высотах полета, а также нереалистичное представление трехмерного изображения закабинного пространства ввиду отсутствия на изображении объектового состава местности.
Задачей изобретения является повышение безопасности полета ЛА за счет расширения функциональных возможностей авианавигатора.
Достигается указанный результат тем, что содержащий микромеханическую бесплатформенную инерциальную навигационную систему, спутниковый навигационный приемник, магнитометр, баровысотомер, подключенные через блок комплексной обработки спутниковых данных и измерений датчиков к блоку синтеза 2D карты, выдающему изображение на дисплей с учетом поступающих данных от блока формирования маршрутов полета, авианавигатор дополнительно снабжен блоком синтеза 3D карты с учетом объектового состава и блоком формирования траектории маловысотного полета, причем блок синтеза 3D карты с учетом объектового состава выдает информацию на дисплей по поступающим данным от блока комплексной обработки спутниковых данных и измерений датчиков и блока формирования траектории маловысотного полета, на вход которого поступают данные от блока формирования маршрутов полета, а выходы дисплея подключены к блоку синтеза 2D карты, блоку формирования маршрутов полета, блоку формирования траектории маловысотного полета и блоку синтеза 3D карты с учетом объектового состава.
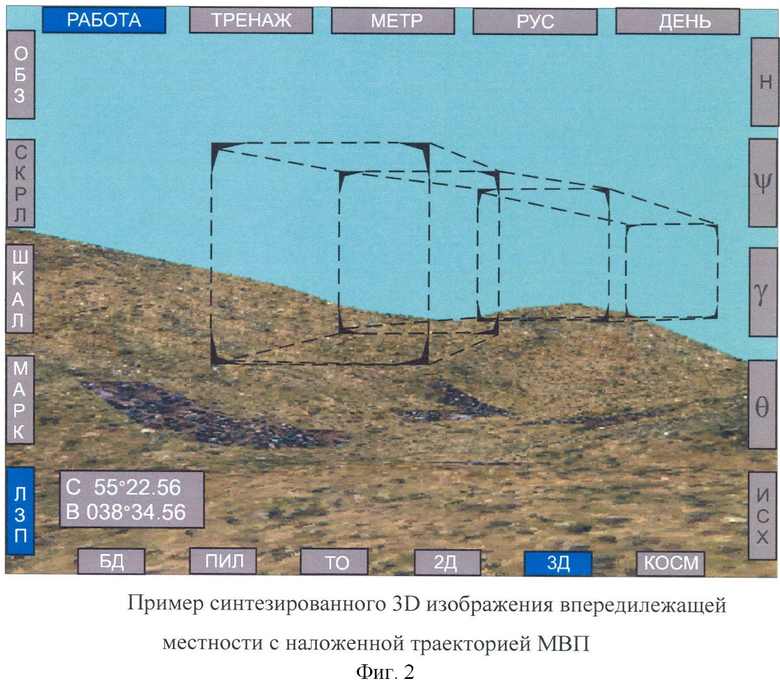
На фигуре 1 представлена блок-схема авианавигатора, содержащего: 1 - микромеханическую бесплатформенную инерциальную навигационную систему (МБИНС), 2 - спутниковый навигационный приемник (СНП), 3 - магнитометр, 4 - баровысотомер, 5 - блок комплексной обработки спутниковых данных и измерений датчиков (БКОСД), 6 - блок синтеза 2D карты (БC2D), 7 - блок формирования маршрутов полета (БФМП), 8 - блок формирования траектории маловысотного полета (БФТМВП), 9 - блок синтеза 3D карты с учетом объектового состава (БC3DOC), 10 - дисплей.
На фигуре 2 представлен пример синтезированного 3D изображения впередилежащей местности с наложенной траекторией МВП.
Информационный обмен между входами-выходами блоков осуществляется по линиям связи, показанным на чертеже сплошной линией. Линии связи представляют собой известные (описанные, например, в книге [Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г., стр.21-24, 394-406] линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные, RS232 и др.
МБИНС 1 обеспечивает измерение географических координат, скоростей и угловых эволюции летательного аппарата. МБИНС 1 может быть построена на базе стандартных микромеханических датчиков системы ориентации по стандартным схемам, приведенным, например, в [Власенко А. Интегральные гироскопы iMEMS - датчики угловой скорости фирмы Analog Devices Российское Представительство Analog Devices, Inc. Электронные компоненты, №2, 2003 г.].
СНП 2 обеспечивает прием спутниковых сигналов о положении и скорости ЛА. СНП 2 может быть построен на базе стандартных элементов, применяемых в приемниках СНС. Например, в качестве СНП 2 могут применяться изделия, приведенные в каталоге «Навигационная аппаратура ГЛОНАСС/GPS ОАО «Ижевский радиозавод» [www.irz.ru].
Магнитометр 3 обеспечивает измерение магнитного курса ЛА. Магнитометр 3 может быть построен на базе стандартных элементов, применяемых в трехосных или двухосных магнитометрах. Принципы построения магнитометров приведены, например, в [статья «Магнитный компас и система GPS». Журнал GPS World, сентябрь 2003, USA].
Баровысотомер 4 обеспечивает измерение абсолютной высоты полета ЛА. Баровысотомер 4 может быть построен на базе стандартных элементов, применяемых в датчиках давления, в том числе микромеханических специальных микросхем типа MPXAZ4115AC6U [Описание микромеханической специальной микросхемы MPXAZ4115AC6U, фирма MOTOROLA].
Дисплей 10 представляет собой стандартный экранный модуль с жидкокристаллическим экраном, на котором осуществляется отображение цветной и монохромной знакографической, телевизионной, картографической и смешанной информации, с кнопочным обрамлением (кнопки-клавиши, сенсорные кнопки), с помощью которого назначают режимы индикации и подрежимы различного назначения.
Вычислительно-логические блоки БКОСД 5, БC2D 6, БФМП 7, БФТМВП 8, БC3DOC 9 выполнены, например, в виде однопроцессорных вычислителей [Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г., стр.31].
БКОСД 5 обеспечивает комплексную обработку спутниковых данных и измерений датчиков с целью формирования комплексной информации о местоположении и углов эволюции летательного аппарата. При нормальной работе приемника СНС он является основным источником навигационной информации. При этом показания инерциальной системы постоянно сравнивают с данными спутниковой и производят уточнение значений параметров модели ошибок ИНС. Когда сигналы спутников пропадают, система переходит в режим прогноза, и навигационную информацию получают от ИНС. В этом случае показания ИНС корректируют в соответствии с прогнозом по модели ошибок. Когда приемник восстанавливает связь со спутниками, его измерения сглаживают, и продолжают оценивать по ним ошибки ИНС. Таким образом, спутниковая и инерциальная навигационные системы при совместном использовании дополняют и корректируют информацию друг друга, повышая надежность и точность навигационного комплекса.
БC2D 6 обеспечивает формирование движущейся двумерной карты (электронный аналог бумажной топографической карты) на основе векторного бортового формата, что позволяет экипажу с помощью кнопочного обрамления дисплея разгружать изображение путем снятия слоев картографической информации. На сформированное картографическое изображение накладывается навигационно-тактическая информация о маршруте полета, а также счетчики и шкалы, отображающие значения измеряемых навигационных параметров.
БФМП 7 обеспечивает формирование заданного маршрута полета на основе работы экипажа с базой аэронавигационных данных, подготовленной в формате по ARINC 424, или введенным с кнопочного обрамления дисплея географическим координатам промежуточных пунктов маршрута (ППМ). Помимо ввода координат ППМ экипаж осуществляет выбор начального и конечного ППМ для участка маловысотного полета (МВП). Информацию о маршруте полета БФМП 7 передает на вход БC2D 6, а информацию о географических координатах начального и конечного ППМ для участка МВП - на вход БФТМВП 8.
Дополнительно введенный БФТМВП 8 обеспечивает расчет траектории МВП по введенным с кнопочного обрамления дисплея данным о режиме МВП (ОБХОД или ОБЛЕТ), заданной скорости полета на участке МВП и заданной высоте облета рельефа. Формирование траектории МВП проводится в два этапа. На первом этапе траектория МВП прокладывается в горизонтальной плоскости, на втором - в вертикальной. Алгоритмы построения траектории МВП в горизонтальной плоскости основаны на использовании метода динамического программирования применительно к решению задачи поиска траектории, соответствующей самому низкому уровню по высотам рельефа. При построении траектории в вертикальной плоскости используется подход, основанный на аппроксимации рельефа кривыми второго порядка. Траектория МВП формируется с учетом заданных экипажем скорости и высоте облета рельефа, а также ограничений на предельные углы крена, наклона траектории и перегрузки, значения которых выбраны соответствующими комфортным условиям пилотирования. Информация о траектории МВП передается на вход БC2D 6 и БC3DOC 9 для отображения экипажу, что позволяет существенно снизить психофизическую нагрузку, связанную с проблемой выбора направления движения ЛА на малой высоте, и тем самым повысить безопасность полета.
Дополнительно введенный БC3DOC 9 обеспечивает формирование трехмерного рельефа впередилежащей местности с нанесенным на него объектовым составом и наложением основных пилотажных параметров ЛА. В режиме МВП на 3D изображении выводится сформированная траектория МВП в виде трехмерного коридора. Синтезируемое изображение впередилежащей местности обладает высокой реалистичностью за счет специальным образом подготовленной базы данных о рельефе местности и объектовом составе в виде полуграней (треугольников), заданных трехмерными координатами и типом объекта. При «заливке» полуграней используются типовые текстуры объектов и/или текстуры местности, сформированные на основе реального космофотоснимка. При опасном сближении ЛА с землей соответствующие полуграни рельефа «подкрашиваются» красным цветом, что является предупреждающим сигналом экипажу для увода ЛА от земли. Реалистичность изображения существенно снижает психофизическую нагрузку экипажа по оценке полетной ситуации, что в совокупности с формированием предупреждающего сигнала об опасном сближении ЛА с землей позволяет существенно повысить безопасность полета.
Дополнительно введенные БФТМВП 8 и БC3DOC 9 значительно расширяют функциональные возможности авианавигатора и существенно повышают эффективность выполнения экипажем задач навигации и управления летательными аппаратами различного назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| УСТРОЙСТВО СИНТЕЗА КАРТОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2250182C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА МНОГОФУНКЦИОНАЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476920C1 |
| Способ оценки маловысотного контура управления ЛА | 2018 |
|
RU2691984C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СПОСОБ УПРАВЛЕНИЯ МАЛОВЫСОТНЫМ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2023 |
|
RU2822805C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| Способ построения маршрута маловысотного полета на виртуальном полигоне | 2018 |
|
RU2696047C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
Изобретение относится к измерительной технике, в частности к радиоэлектронным системам повышения безопасности полета летательных аппаратов (ЛА). Технический результат - повышение безопасности полета ЛА за счет резервирования основного пилотажно-навигационного контура, а также информационной поддержки при полете ЛА в сложных метеоусловиях путем формирования трехмерных и двумерных изображений картографической обстановки с наложением пилотажно-навигационной информации. Для достижения данного результата в состав устройства входят микромеханическая бесплатформенная инерциальная навигационная система, спутниковый приемник, магнитометр, баровысотомер, дисплей и следующие вычислительно-логические блоки: блок формирования маршрутов полета, блок синтеза 2D карты, блок синтеза 3D карты с учетом объектового состава, блок формирования траектории маловысотного полета. Данный авианавигатор значительно расширяет функциональные возможности авианавигатора и существенно повышает эффективность выполнения экипажем задач навигации и управления летательными аппаратами различного назначения. 2 ил.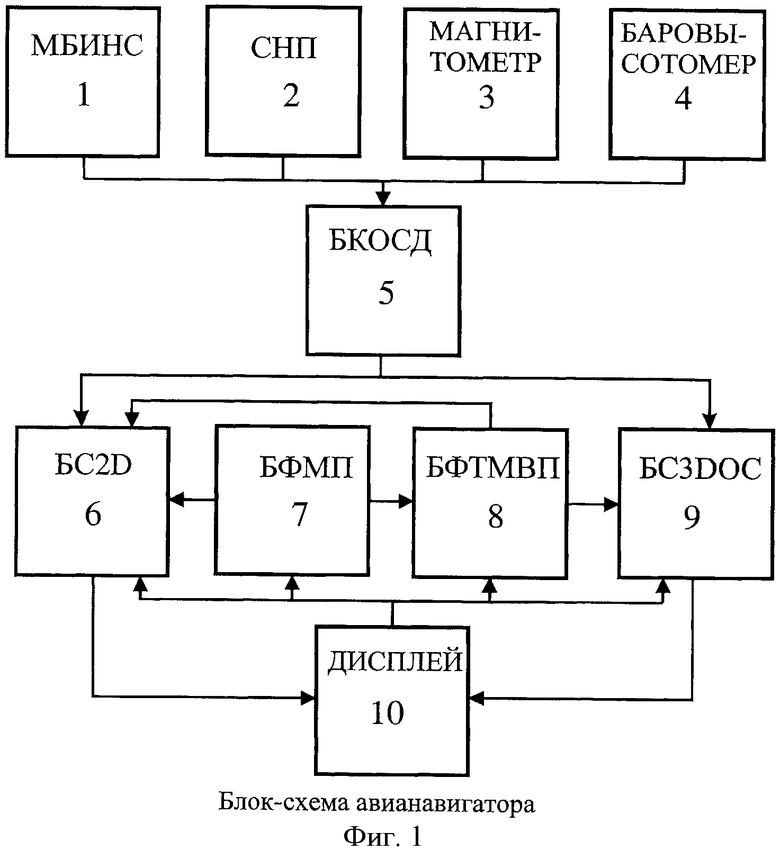
Авианавигатор, включающий микромеханическую бесплатформенную инерциальную навигационную систему, спутниковый навигационный приемник, магнитометр, баровысотомер, подключенные через блок комплексной обработки спутниковых данных и измерений датчиков к блоку синтеза 2D карты, выдающему изображение на дисплей с учетом поступающих данных от блока формирования маршрутов полета, при этом блок синтеза 2D карты и блок формирования маршрутов полета управляются по сигналам от дисплея, отличающийся тем, что в него дополнительно введены блок синтеза 3D карты с учетом объектового состава и блок формирования траектории маловысотного полета, причем блок синтеза 3D карты с учетом объектового состава выдает информацию на дисплей по поступающим данным от блока комплексной обработки спутниковых данных и измерений датчиков и блока формирования траектории маловысотного полета, на вход которого поступают данные от блока формирования маршрутов полета, выход блока формирования траектории маловысотного полета подключен к блоку синтеза 2D карты, а выходы дисплея подключены к блоку формирования траектории маловысотного полета и блоку синтеза 3D карты с учетом объектового состава.
| ТИТОВ А | |||
| Автономное пилотажно-навигационное средство | |||
| Описание системы | |||
| Статья «Образная индикация» // Вертолет | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2264598C1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.171, 185-188 | |||
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2184381C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| US 6041280 A, 21.03.2000 | |||
| DE 10146333 A1, 02.05.2002. | |||

