Область техники
Настоящее изобретение относится к способу, позволяющему оценивать определенные параметры импульсной характеристики канала распространения электромагнитных или акустических волн, тогда как последние предусматривают излучатели, чувствительные элементы и отражатели, стационарные или подвижные, посредством сложной функции пространственной/запаздывания-дальностной/доплеровской-кинематической неопределенностей, для обнаружения и определения положения и кинематических параметров излучателей и отражателей.
Это используется во многих областях электромагнетизма и акустики, при обнаружении, передаче, определении местоположения, навигации, в целях совершенствования знаний о среде распространения, и следовательно, улучшения обработки полезных сигналов, техники радиосвязи и широковещательных радиосетей, управления воздушным движением, контроля береговой зоны, и т.д.
Это может применяться для самоопределения местоположения приемной системы, реализующей настоящее изобретение.
Это используется, например, в отношении излучателей, отражателей и чувствительных элементов, стационарных или подвижных, в электромагнетизме и в акустике.
Предшествующий уровень техники
Измерительные системы распространения, зондирования, обнаружения и определения местоположения стандартных электромагнитных или акустических отражателей почти всегда активны и обычно используют:
- механическое зондирование с использованием направленной антенны (параболического отражателя, например) или электронное зондирование с использованием луча, сформированного благодаря массиву чувствительных элементов с взвешиванием фазы и с взвешиванием амплитуды, и
- для каждого положения наведения (или пространственной ячейки) луча:
испускание известных сигналов, которые могут быть непрерывными, импульсными или в форме известных последовательностей импульсов,
вычисление функции дальностной/скоростной неопределенностей на основании, в случае узкополосных сигналов, корреляции, с испускаемыми сигналами, сигналов, наблюдаемых на выходе антенны и смещенных по времени и частоте, и на основании, в случае широкополосных сигналов, корреляции, с испускаемыми сигналами, запаздывающих сигналов, наблюдаемых на выходе антенны, смещенных по частоте, сжатых по времени и по частоте,
- для каждой дальностной/доплеровской ячейки
установление порога для заданной вероятности ложной тревоги,
сравнение функции неопределенностей с порогом.
Основным конкретным признаком этой операции является разделение между пространственным анализом (качание луча) и дальностным/скоростным или запаздывания/доплеровским анализом. Это разделение порождает необходимость систематически обеспечивать выполнение дальностного/скоростного анализа для каждого положения луча, независимо от наличия в луче излучателей или отражателей.
При этом наведение луча неявно предполагает распространение неявным образом в свободном пространстве (без множественных трактов) и требует, для электронного зондирования, управления диаграммой направленности антенны (моделирование излучающих элементов и сети, калибровка матрицы чувствительных элементов, и т.д.).
Кроме того, для данной пространственной/дальностной/ доплеровской ячейки, регулирование порога требует предварительной оценки уровня шумов на основании результата наблюдения за пространственными/дальностными/доплеровскими ячейками в отсутствии отражателей, что может оказаться сложным для реализации и дорогостоящим в вычислении. Кроме того, при наличии помех при приеме должны быть введены методы для исключения помех с помощью пространственной фильтрации для каждого положения качающегося луча, который таким образом становится защищенным от помех и устойчивым к ним. Однако, поскольку качающийся луч имеет определенную угловую ширину, обратно пропорциональную раскрытию антенны или сети (в переводе на число длин волны), подавление помех для заданной пространственной ячейки может сопровождаться подавлением отражающегося эхо-сигнала, присутствующего в той же ячейке. В связи с этим методы повышения устойчивости, предотвращающие подавление отражателей, которые будут измеряться, должны быть встроены в операции обработки за счет потенциальной потери эксплуатационных характеристик в отношении подавления помех и повышенной сложности при реализации.
Задача измерения распространения или электромагнитного, или акустического обнаружения предполагает обнаружение присутствия испускаемого сигнала s(kTe) определенной длительности 0≤k≤K-1, а также оценку канального вектора hs (имеющего отношение к приему множественными чувствительными элементами и соответствующего направляющему вектору положения отражателя или излучателя для распространения в свободном пространстве), запаздывания l0Te (для простоты принимается равным кратному периода выборки, но это отнюдь не является обязательным или ограничивающим условием) и доплеровского сдвига Δf0=m0/KTe (имея разрешающую способность по частоте 1/KTe, для простоты принимается, что доплеровский сдвиг является кратным этой разрешающей способности), исходя из знания испускаемого сигнала и из результата наблюдения за вариантами векторов x(kTe) сигналов со смещением частоты и с преобразованием частоты, принимаемых на чувствительном элементе.
В случае применения стандартного измерения распространения или обнаружения в электромагнетизме или в акустике, стандартные принимающие устройства заранее предполагают распространение в свободном пространстве, другими словами  и сканирование пространства, направление за направлением или вектор s за вектором s, с разрешением, соответствующим ширине лепестка диаграммы направленности (обычно ширине лепестка диаграммы направленности "на 3 дБ") луча, сформированного используемой сетью, где hS является вектором импульсных характеристик каналов, связанных с направлением отражателя, и ϕS и s, соответственно, представляют собой фазу и направляющий вектор излучателя или отражателя. Это определяет вышеупомянутое понятие пространственной ячейки, обычно используемое специалистами в данной области техники. Более того, запаздывание l0Te оценивается с разрешением, равным 1/Be, которое номинально является функцией (как правило, пропорциональной) обратной величины эквивалентной частоты, Be, испускаемого сигнала, и эта обратная величина также определяет разрешение по дальности. Это определяет понятие дальностной ячейки, упомянутое выше и обычно используемое специалистами в данной области техники. Наконец, разрешение оценки доплеровского сдвига является функцией (как правило, пропорциональной) обратной величины срока отдельного наблюдения, то есть обратной величины продолжительности KTe испускаемого сигнала. Это определяет понятие доплеровской ячейки, упомянутое выше и обычно используемое специалистами в данной области техники.
и сканирование пространства, направление за направлением или вектор s за вектором s, с разрешением, соответствующим ширине лепестка диаграммы направленности (обычно ширине лепестка диаграммы направленности "на 3 дБ") луча, сформированного используемой сетью, где hS является вектором импульсных характеристик каналов, связанных с направлением отражателя, и ϕS и s, соответственно, представляют собой фазу и направляющий вектор излучателя или отражателя. Это определяет вышеупомянутое понятие пространственной ячейки, обычно используемое специалистами в данной области техники. Более того, запаздывание l0Te оценивается с разрешением, равным 1/Be, которое номинально является функцией (как правило, пропорциональной) обратной величины эквивалентной частоты, Be, испускаемого сигнала, и эта обратная величина также определяет разрешение по дальности. Это определяет понятие дальностной ячейки, упомянутое выше и обычно используемое специалистами в данной области техники. Наконец, разрешение оценки доплеровского сдвига является функцией (как правило, пропорциональной) обратной величины срока отдельного наблюдения, то есть обратной величины продолжительности KTe испускаемого сигнала. Это определяет понятие доплеровской ячейки, упомянутое выше и обычно используемое специалистами в данной области техники.
Предшествующий уровень техники определяет различные структуры приема. В общем случае структура приема оптимального устройства обнаружения зависит от заранее доступной информации о каналах распространения сигналов, исходящих от излучателей и отражателей, которые будут обнаруживаться, и о суммарном шуме, который содержит тепловой шум принимающих устройств и потенциальные помехи [1]. Стандартные принимающие устройства, используемые при электромагнитном [2] или акустическом [4] обнаружении, которые сканируют пространство при помощи электронного или механического качания луча и реализуют пространственный анализ в направлении восходящего потока и без связи с дальностным/доплеровским анализом, заранее предполагают, как правило, неявно или явно, для каждого положения луча и каждой сканируемой дальностной/доплеровской ячейки, следующее:
- распространение в свободном пространстве,
- известное направление сканирования,
- суммарный гауссов шум, кольцевой и неизвестный,
- сигналы, исходящие от излучателей или от отражателей, которые являются слабыми по сравнению с фоновым шумом,
- неизвестная фаза сигналов, исходящих от излучателей или от отражателей.
Эти принимающие устройства являются оптимальными только с учетом этих допущений.
Краткое изложение существа изобретения
Задачей настоящего изобретения является замена вышеописанных стандартных структур структурой приема, которая позволяет преодолеть, по меньшей мере, вышеупомянутые недостатки системы. В частности, в это входит увязывание пространственного анализа и запаздывания-дальностного/ доплеровского-кинематического анализа в объединенном способе обработки. Это реализует связанную/объединенную обработку пространственных переменных запаздывания-дальности. Способ изобретения позволяет, в частности, определить параметры импульсной характеристики. Этими параметрами являются, например, параметры, касающиеся пространственной, временной и частотной структуры радиоэлектрического поля (распределения углов падения, угловая, временная и доплеровская диффузия, и т.д.). Этими параметрами также могут быть характеристики диффузии за счет препятствий на земле, в пространстве, и т.д., или даже кинематические параметры диффузоров. Настоящее изобретение имеет отношение к способу для обнаружения и/или определения местоположения излучателей и отражателей, стационарных или подвижных, в системе, содержащей N чувствительных элементов, принимающих сигналы, исходящие от упомянутых излучателей или отражателей, стационарных или подвижных, отличающемуся тем, что содержит, по меньшей мере, следующие этапы, на которых:
определяют функции неопределенности, увязывая пространственный анализ и запаздывания-дальностный/ доплеровский-кинематический анализ,
определяют, по меньшей мере, одну достаточную статистику  , соответствующую корреляции между известным сигналом s(kTe), соответствующим комплексной огибающей испускаемого сигнала, и выходом фильтра w (l, m), где l обозначает временное/запаздывания-дальностное допущение, а m обозначает частотное/доплеровское-кинематическое допущение, определяя значения параметров допущения (l, m) путем сравнения значения статистики для параметров допущения (l, m) с пороговым значением.
, соответствующую корреляции между известным сигналом s(kTe), соответствующим комплексной огибающей испускаемого сигнала, и выходом фильтра w (l, m), где l обозначает временное/запаздывания-дальностное допущение, а m обозначает частотное/доплеровское-кинематическое допущение, определяя значения параметров допущения (l, m) путем сравнения значения статистики для параметров допущения (l, m) с пороговым значением.
Доплеровский/кинематический параметр использует m как индекс переменных. Следует отметить, что вышеупомянутые обозначения для статистики  , для сигнала s(kTe) и фильтра w(l, m) понимаются в формальном смысле: как полная общность, каждый из параметров l, k и m может представлять ряд переменных, связанных с положением и кинематикой излучателя, отражателя, даже чувствительного элемента, если он сам является подвижным. Однако для узкополосного сигнала и времени когерентного интегрирования способа обработки, которое является достаточно малым, чтобы гарантировать уменьшение изменения положения и кинематики излучателя, отражателя и чувствительного элемента, мы возвращаемся к упрощенным случаям, описанным выше: временное допущение l сводится к допущению в отношении величины запаздывания, а частотное допущение m сводится к допущению в отношении величины доплеровского сдвига, соответственно, представляющим собой значения, кратные (целые или иные) разрешениям, о которых говорилось выше. Чтобы гарантировать эффективность способа в самых сложных случаях, например, когда кинематика чувствительного элемента, излучателя или отражателя порождает нестационарности параметров запаздывания или доплеровских параметров в течение времени когерентного интегрирования сигналов при реализации (например, нестационарности, связанные с высокой скоростью), определение l учитывает не только запаздывание сигнала, исходящего от отражателя, но и параметры первого порядка, такие, как относительное временное пилообразное изменение сигнала, исходящего от отражателя (или производная запаздывания по времени интегрирования, как таковая зависящая от временной огибающей сигнала и от параметризации операции обработки, что является предметом настоящего изобретения), не только допплеровский сдвиг m сигнала, исходящего от отражателя, но и параметры первого порядка, такие, как пилообразное изменение доплеровской частоты в сигнале, исходящем от отражателя (или производная допплеровского сдвига по времени интегрирования, как таковая ограниченная спектральной огибающей сигнала и параметризацией операции обработки, что является предметом настоящего изобретения). Даже в более сложных случаях, возможно использование относительных угловых, временных и доплеровских параметров второго порядка, и любого другого типа переменной, моделирующей кинематику излучателя, отражателя или чувствительного элемента.
, для сигнала s(kTe) и фильтра w(l, m) понимаются в формальном смысле: как полная общность, каждый из параметров l, k и m может представлять ряд переменных, связанных с положением и кинематикой излучателя, отражателя, даже чувствительного элемента, если он сам является подвижным. Однако для узкополосного сигнала и времени когерентного интегрирования способа обработки, которое является достаточно малым, чтобы гарантировать уменьшение изменения положения и кинематики излучателя, отражателя и чувствительного элемента, мы возвращаемся к упрощенным случаям, описанным выше: временное допущение l сводится к допущению в отношении величины запаздывания, а частотное допущение m сводится к допущению в отношении величины доплеровского сдвига, соответственно, представляющим собой значения, кратные (целые или иные) разрешениям, о которых говорилось выше. Чтобы гарантировать эффективность способа в самых сложных случаях, например, когда кинематика чувствительного элемента, излучателя или отражателя порождает нестационарности параметров запаздывания или доплеровских параметров в течение времени когерентного интегрирования сигналов при реализации (например, нестационарности, связанные с высокой скоростью), определение l учитывает не только запаздывание сигнала, исходящего от отражателя, но и параметры первого порядка, такие, как относительное временное пилообразное изменение сигнала, исходящего от отражателя (или производная запаздывания по времени интегрирования, как таковая зависящая от временной огибающей сигнала и от параметризации операции обработки, что является предметом настоящего изобретения), не только допплеровский сдвиг m сигнала, исходящего от отражателя, но и параметры первого порядка, такие, как пилообразное изменение доплеровской частоты в сигнале, исходящем от отражателя (или производная допплеровского сдвига по времени интегрирования, как таковая ограниченная спектральной огибающей сигнала и параметризацией операции обработки, что является предметом настоящего изобретения). Даже в более сложных случаях, возможно использование относительных угловых, временных и доплеровских параметров второго порядка, и любого другого типа переменной, моделирующей кинематику излучателя, отражателя или чувствительного элемента.
В тех случаях, когда временные параметры, обозначенные l, сводятся к запаздыванию или к дальности, и когда кинематические параметры, обозначенные m, сводятся к доплеровской частоте или к относительной скорости, способ содержит, по меньшей мере, следующие этапы, на которых:
для каждого допущения l запаздывания и каждого доплеровского допущения m:
- оценивают вектор  (5), исходя из K известных выборок, s(kTe), из испускаемого сигнала и из K результатов наблюдений, которые смещаются по частотам, xm ((k+l)Te)=x ((k +l) Te) exp[-j2πm (k+l)/K ], 0≤k≤K-1,
(5), исходя из K известных выборок, s(kTe), из испускаемого сигнала и из K результатов наблюдений, которые смещаются по частотам, xm ((k+l)Te)=x ((k +l) Te) exp[-j2πm (k+l)/K ], 0≤k≤K-1,
- оценивают матрицу  , исходя из K результатов наблюдений, которые смещаются по частотам, xm((k+l)Te)=x ((k +l) Te) exp[-j2πm (k+l)/K ], 0≤k≤K-1,
, исходя из K результатов наблюдений, которые смещаются по частотам, xm((k+l)Te)=x ((k +l) Te) exp[-j2πm (k+l)/K ], 0≤k≤K-1,
- вычисляют достаточную статистику  , где
, где  определяется оценкой по методу наименьших квадратов средней мощности известного сигнала,
определяется оценкой по методу наименьших квадратов средней мощности известного сигнала,
- устанавливают порог обнаружения для заданной вероятности ложной тревоги,
- сравнивают статистику  с фиксированным порогом и дают команду на обнаружение излучателя или отражателя в дальностной/доплеровской ячейке (l, m), если порог превышен,
с фиксированным порогом и дают команду на обнаружение излучателя или отражателя в дальностной/доплеровской ячейке (l, m), если порог превышен,
- оценивают относительное запаздывание и дальность излучателя или отражателя, исходя из l,
- оценивают относительную доплеровскую частоту и скорость излучателя или отражателя, исходя из m,
- оценивают пространственную ячейку излучателя или отражателя, исходя из направляющего вектора  на антенне сигнала, исходящего от излучателя или отражателя, задаваемого как
на антенне сигнала, исходящего от излучателя или отражателя, задаваемого как  .
.
В более сложных случаях способ содержит, например, следующие этапы, на которых:
3A) временные параметры вводятся в определение, такие, как запаздывания-положения, обозначенные l, в определение частотных параметров, таких, как доплеровские-кинематические, обозначенных m, и в определение известного сигнала s по каждому допущению l и m, переменные и преобразования сигнала, вызванные перемещениями излучателя, принимающего устройства или отражателя, и колебаниями канала распространения, в зависимости от допущения запаздывание-положение, допущения относительной доплеровской частоты-скорости, времени интегрирования при обработке, эквивалентной ширины полосы частот сигнала, эквивалентной продолжительности сигнала и его периодичности в импульсном режиме на протяжении времени интегрирования обработки, от колебания запаздывания за это время, от колебания доплеровской частоты за это время,
3B) сигнал sl,m, полученный в результате преобразования s, используется согласно временным допущениям, обозначенным l, и частотным допущениям, обозначенным m.
Для обнаружения излучателя или отражателя, чей сигнал подвержен сильным помехам, способ использует сигнал x'm (( k+l ) Te) и опорный сигнал s' (в виде копии ожидаемого сигнала) вместо входного сигнала xm ((k+l)Te) и исходного опорного сигнала s, при этом сигнал x'm ((k+l) Te) получается из сигнала xm ((k+l) Te), а опорный сигнал s' получается из исходного опорного сигнала s или из преобразованного опорного сигнала sl,m посредством операций, влекущих за собой усиление пространственно-временных фильтров, таких, как следующие:
6A) для каждого мешающего излучателя:
оценка импульсной характеристики gint фильтра распространения от излучателя на принимающее устройство путем минимизации критерия  , причем опорный сигнал Sint=(sint((l0+l)Te), sint((l0+l+1)Te), …, sint((l0+l+L-1)Te))T или Sint,m,l ″=(sint,m,l »((l0+l)Te), sint,m,l »((l0+l+1)Te), …, sint,m,l »((l0+l+L-1)Te))T получается либо благодаря общему априорному знанию исходного мешающего сигнала, либо благодаря частичному априорному знанию исходного мешающего сигнала, либо благодаря демодуляции/ выравниванию исходного мешающего сигнала любыми известными специалистам в данной области техники средствами, и проведению возможного преобразования до Sint,m,l,
, причем опорный сигнал Sint=(sint((l0+l)Te), sint((l0+l+1)Te), …, sint((l0+l+L-1)Te))T или Sint,m,l ″=(sint,m,l »((l0+l)Te), sint,m,l »((l0+l+1)Te), …, sint,m,l »((l0+l+L-1)Te))T получается либо благодаря общему априорному знанию исходного мешающего сигнала, либо благодаря частичному априорному знанию исходного мешающего сигнала, либо благодаря демодуляции/ выравниванию исходного мешающего сигнала любыми известными специалистам в данной области техники средствами, и проведению возможного преобразования до Sint,m,l,
6B) для одного или более мешающих излучателей, стационарных или с известной кинематикой, и которые выбираются согласно их частоте и временной устойчивости,
различные частотные допущения вводятся в опорный сигнал Sint, и повторения, присутствующие в опорном сигнале, используются для того, чтобы точно оценить, на больших длинах K интегрирования, отклонения частоты и времени в отношении мешающего излучателя, уходы в отношении мешающего излучателя оцениваются для местных гетеродинов смесителей и тактовых генераторов системы для приема и выборки сигналов, используемой для реализации настоящего изобретения.
На протяжении этапа 6B способ содержит, например, следующие этапы:
фильтр распространения gint, связанный с мешающим излучателем, обновляется (этап 6A), и
6C) для каждого мешающего излучателя,
свертывание исходного sint или преобразованного sint,m,l мешающего сигнала исполняется с помощью фильтра распространения gint, который связан с ним, и сигнал, полученный в результате этой операции, вычитается из суммарного принятого сигнала,
6D) уходы частоты и времени компенсируются
- либо на сигнале, полученном из xm ((k+l)Te) после упомянутых выше операций, с целью получения сигнала x'm((k+l)Te), s в таком случае остается неизменным (s'=s),
- либо на опорном сигнале, используемом в способе, s может, таким образом, стать s', sm,l может стать sm,l',
6E) реализация вышеупомянутых этапов при x'm и s',
6F) реализация вышеупомянутых этапов при x'm и sm,l'.
Например, используется вектор результата наблюдения  , состоящий из вектора результата наблюдения и его сопряженного комплекса, и в таком случае вышеупомянутые этапы реализуются на основании
, состоящий из вектора результата наблюдения и его сопряженного комплекса, и в таком случае вышеупомянутые этапы реализуются на основании  вместо xm(( k+l ) Te).
вместо xm(( k+l ) Te).
Также имеется в распоряжении, например, контрольный уровень только суммарного шума, и вышеупомянутые этапы исполняются с использованием оценки расширенной матрицы только суммарного шума,  , полученной с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,
, полученной с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,  , где
, где  .
.
Так как направляющий вектор отражателя известен для прямолинейных испускаемых сигналов и потенциально бесцикловых помех, способ отличается тем, что он содержит, по меньшей мере, следующие этапы, на которых:
вычисляют достаточную статистику

строят матрицу
 (21)
(21)
строят статистику
 (20)
(20)

устанавливают порог обнаружения для заданной вероятности ложной тревоги,
сравнивают величину статистики  с порогом и обнаруживают излучатель или отражатель в дальностной/ доплеровской ячейке (l, m) и пространственной ячейке s, если порог превышен,
с порогом и обнаруживают излучатель или отражатель в дальностной/ доплеровской ячейке (l, m) и пространственной ячейке s, если порог превышен,
оценивают относительное запаздывание и дальность излучателя или отражателя, исходя из l,
оценивают относительную доплеровскую частоту и скорость/кинематику излучателя или отражателя, исходя из m,
оценивают угловое положение излучателя или отражателя, исходя из s.
Настоящее изобретение также имеет отношение к устройству, содержащему средство, такое, как обрабатывающее устройство, пригодное для исполнения этапов способа настоящего изобретения.
Пространственная/запаздывания-дальностная/доплеровская-кинматическая взаимосвязь, что является предметом настоящего изобретения, делает возможным, в частности, прямой доступ к положениям излучателей и отражателей без необходимости зондирования всего пространства и, следовательно, без необходимости сканирования направлений, на которых нет излучателей и отражателей. Это позволяет ослабить ограничения на управление конфигурацией сети чувствительных элементов (например, в случае взаимосвязи между излучающими элементами, калибровка больше не требуется) и идеально подходит для распространения с множественными трактами. Наконец, эта продуманная взаимосвязь учитывает не только установление порога, который не зависит от уровня шума, присутствующего на входе, но также и внутреннюю защиту в отношении помех, без риска подавления сигналов, которые полезны для измерения, и без необходимости вставления операции обработки для повышения устойчивости.
Краткое описание чертежей
Другие преимущества и признаки настоящего изобретения станут более очевидными, благодаря прочтению нижеследующего описания упрощенного иллюстративного варианта осуществления, приведенного в качестве иллюстрации, а ни в коем случае не ограничения, с прилагаемыми чертежами, на которых
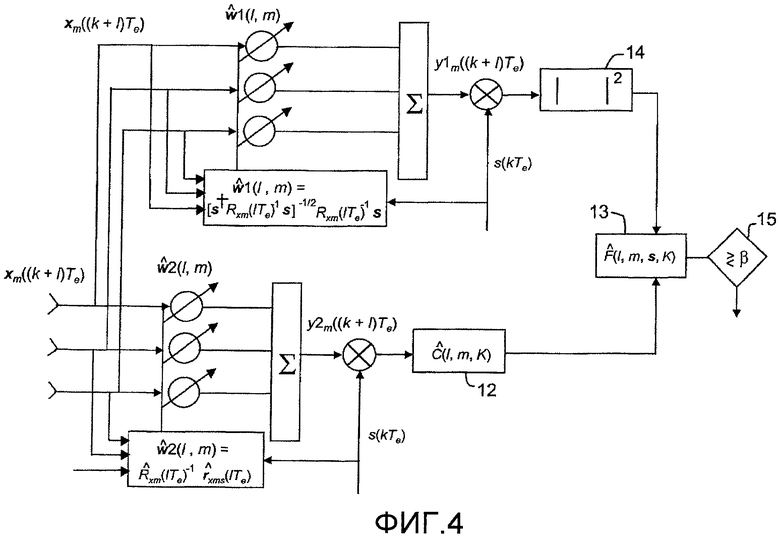
Фиг.1 - функциональная схема функции пространственной/запаздывания-дальностной/доплеровской-кинематической неопределенностей согласно настоящему изобретению, причем доплеровские-кинематические параметры сводятся в этом неограничивающем упрощенном случае к доплеровскому параметру, напрямую связанному с относительной скоростью излучателя или отражателя;
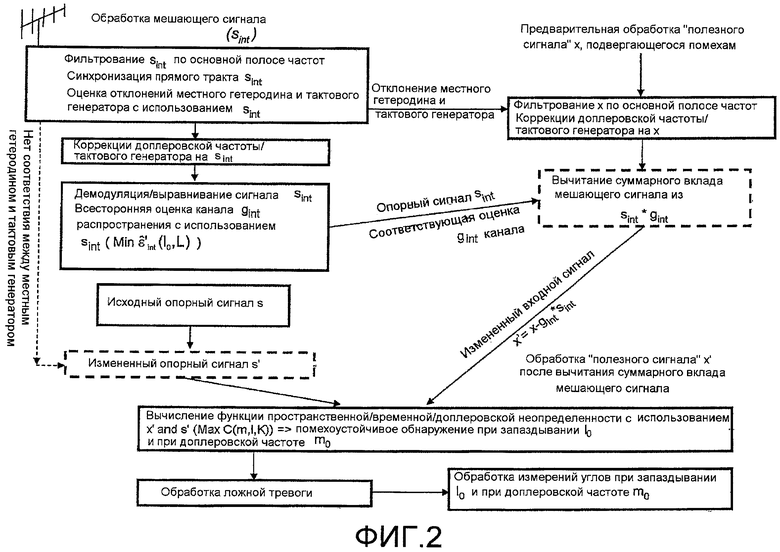
Фиг.2 - блок схема операций способа с учетом помех;
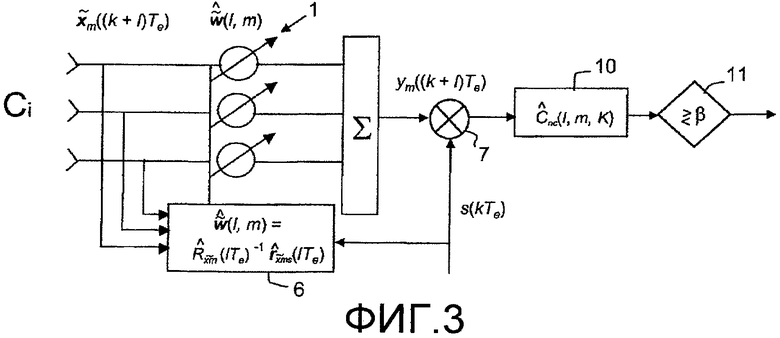
Фиг.3 - функциональная схема бесциклового расширения функции пространственной/запаздывания-дальностной/доплеровской-кинематической неопределенностей, причем доплеровские-кинематические параметры сводятся в этом неограничивающем упрощенном случае к доплеровскому параметру, напрямую связанному с относительной скоростью излучателя или отражателя;
Фиг.4 - функциональная схема функции пространственной/запаздывания-дальностной/доплеровской-кинематической неопределенностей при известном s, причем доплеровские/кинематические параметры сводятся в этом неограничивающем упрощенном случае к доплеровскому параметру, напрямую связанному с относительной скоростью излучателя или отражателя.
Описание предпочтительных вариантов воплощения изобретения
Считается, что антенна имеет N узкополосных (УП) цифровых чувствительных элементов Ci, принимающих поступление от излучателя или отражателя непрерывного, импульсного или повторяемого импульсного сигнала, порождаемого системой электромагнитного или акустического излучения с известными возможностями (неограничивающие примеры: излучатель системы связи, который предварительно демодулируется, или определенные части сигнала которого заранее известны - слова и коды синхронизации - излучающая часть канального акустического зонда, и т.д.), к которому добавляется суммарный шум, состоящий из помех и фонового шума. Учитывая эти допущения, вектор x(kTe) комплексных огибающих сигналов, выбираемых и наблюдаемых на выходе чувствительных элементов Ci, рассчитывается по формуле
x(kTe) ≈ s((k - l0)Te) exp[ j2πm0 ( k - l0)/K ] hS+bT (kTe) (1),
(1),
где Te является периодом выборки цифрового чувствительного элемента; s(t) является комплексной огибающей испускаемого сигнала, известного принимающему устройству и продолжительностью KTe; bT (kTe) является выбранным вектором суммарного шума, не коррелированным с сигналом, исходящим от отражателя; hS является вектором импульсных характеристик каналов, связанных с сигналом, исходящим от отражателя; l0Te является запаздыванием при распространении сигнала, исходящего от отражателя, содержащего, в частности, информацию о расстоянии между отражателем, используемой системой излучения и чувствительным элементом, причем это запаздывание для простоты принимается равным кратному Te, допущение, сделанное в качестве неограничивающего примера; Δf0=m0/KTe является доплеровским сдвигом, порожденным отражателем (потенциально подвижным), для простоты принимается равным кратному обратной величины времени интегрирования операции обработки KTe, допущение, сделанное в качестве неограничивающего примера, в котором содержится информация об относительной скорости отражателя по отношению к положениям системы излучения и чувствительного элемента, которые используются. Строго говоря, модель (1) предполагает каналы распространения без временного рассеивания, которое возникает, например, при распространении в свободном пространстве (спутниковая дальняя связь, воздушная радиосвязь, и т.д.), или каналы с замиранием сигнала, когда полоса когерентности канала больше ширины полосы сигнала, более известно под термином "плавное замирание", которое оказывает влияние в некоторых ситуациях при радиосвязи или обнаружении в городских зонах. В частности, при распространении в свободном пространстве, , где ϕS и s, соответственно, представляют собой фазу и направляющий вектор сигнала, исходящего от излучателя или отражателя. Модель (1) также предполагает, что временные и частотные параметры излучателя или отражателя сводятся к запаздыванию и к доплеровскому сдвигу, при этом настоящее описание является строго полным только для излучателей или отражателей с конкретной кинематикой (равномерное прямолинейное движение и ограниченная скорость относительно времени когерентного интегрирования способа обработки).
Тем не менее способ также применяется для каналов с временным рассеиванием. В этих условиях полезная часть (1), фактически, соответствует вкладу тракта или режима распространения сигнала, исходящего от излучателя или отражателя, при этом другие тракты объединяются в векторе суммарного шума.
Кроме того, как подчеркивалось ранее, способ также применяется к излучателям, отражателям или чувствительным элементам, демонстрирующим более сложную кинематику, чем прямолинейное движение, которое является равномерным и ограниченным по скорости относительно времени интегрирования способа обработки. В этих условиях полезная часть (1), фактически, соответствует вкладу сигнала, который подвергается искажению, вызванному этой кинематикой, и должен рассматриваться результат наблюдения полезного сигнала, который дополняется параметрами первого порядка (1 порядка), как отмечалось ранее, например временным пилообразным изменением и пилообразным изменением доплеровской частоты, чтобы сообщать о высоких относительных скоростях или перемещениях с ограниченным ускорением излучателя, отражателя или чувствительного элемента на протяжении фазы когерентного интегрирования способа обработки, что является предметом настоящего изобретения, а равно параметрами второго порядка (2 порядка), чтобы сообщать о фазах существенного ускорения/замедления излучателя, отражателя или чувствительного элемента на протяжении когерентного интегрирования способа обработки, что является предметом настоящего изобретения; и, наконец, моделирование искажения сигнала s, вызванное временным допущением, обозначенным l, и вызванное частотным допущением, обозначенным m, перед применением способа к сигналу sl,m, таким образом полученному посредством преобразования сигнала s. Отметим, что вышеупомянутый список параметров не является ограничивающим, могут вводиться другие параметры, чтобы моделировать влияние кинематики системы излучения, чувствительного элемента или отражателя на сигнал, исходящий от последнего.
Статистики результатов наблюдения второго порядка
Статистика второго порядка, рассматриваемая далее в настоящем описании, соответствует первой корреляционной матрице вектора комплексных огибающих сигналов, выбранных и наблюдаемых на выходе чувствительных элементов, x(kTe), определяемой, с учетом предыдущих допущений, выражением
 (2),
(2),
которая зависит от времени в целом из-за потенциальной нестационарности испускаемого сигнала (цифровые модуляции для связных сигналов, например …). В вышеприведенных выражениях, † означает сопряженное транспонирование,  является первой корреляционной матрицей вектора bT(kTe),
является первой корреляционной матрицей вектора bT(kTe),  является мгновенной мощностью сигнала, исходящего от излучателя или отражателя, который должен приниматься ненаправленным чувствительным элементом при распространении в свободном пространстве.
является мгновенной мощностью сигнала, исходящего от излучателя или отражателя, который должен приниматься ненаправленным чувствительным элементом при распространении в свободном пространстве.
Различные варианты осуществления, описываемые ниже в данном документе, реализуются, например, в принимающем устройстве, содержащем несколько приемных антенн C1, …, CN и обрабатывающее устройство P, запрограммированное на исполнение различных этапов. Различные иллюстративные варианты осуществления показываются в отношении Фиг.1, 2, 3 и 4.
В частности, способ настоящего изобретения основывается на определении функции неопределенности путем использования взаимосвязи пространственного анализа и запаздывания-дальностного/доплеровского-кинематического анализа в объединенном способе обработки.
Иллюстративные варианты осуществления настоящего изобретения
Первый вариант осуществления способа изобретения, продемонстрированный на Фиг.1, состоит в нахождении такого временного/запаздывания-дальностного допущения  и частотного/доплеровского-кинематического допущения
и частотного/доплеровского-кинематического допущения  , что известные выборки s(kTe), 0≤k≤K-1, оптимально обнаруживаются, исходя из векторов результатов наблюдения xm((k+l)Te)=x (( k+l) Te) exp [ -j2πm ( k+l )/K ], 0≤k≤K-1, предполагая, что R(k) и hS неизвестны и не делая допущений касательно каналов распространения и уровня сигнала, исходящего от излучателя или отражателя.
, что известные выборки s(kTe), 0≤k≤K-1, оптимально обнаруживаются, исходя из векторов результатов наблюдения xm((k+l)Te)=x (( k+l) Te) exp [ -j2πm ( k+l )/K ], 0≤k≤K-1, предполагая, что R(k) и hS неизвестны и не делая допущений касательно каналов распространения и уровня сигнала, исходящего от излучателя или отражателя.
Один способ состоит в нахождении таких  и
и  , что известные выборки s(kTe), 0≤k≤K-1, оптимально оцениваются, в смысле наименьших квадратов, в результате операции линейной фильтрации на результатах наблюдений xm((k+l)Te), 0 ≤ k ≤ K-1. Другими словами, способ стремится найти
, что известные выборки s(kTe), 0≤k≤K-1, оптимально оцениваются, в смысле наименьших квадратов, в результате операции линейной фильтрации на результатах наблюдений xm((k+l)Te), 0 ≤ k ≤ K-1. Другими словами, способ стремится найти  и
и  , минимизирующие критерий наименьших квадратов
, минимизирующие критерий наименьших квадратов
 (3),
(3),
где  , снабженное ссылочным значением 1 на Фиг.1, является пространственным фильтром, который минимизирует критерий (3) и который определяется как
, снабженное ссылочным значением 1 на Фиг.1, является пространственным фильтром, который минимизирует критерий (3) и который определяется как
 (4),
(4),
где вектор  и матрица
и матрица  задаются формулой
задаются формулой
 (5)
(5)
 (6)
(6)
Вводя (4), (5) и (6) в (3), новое выражение критерия наименьших квадратов  задается формулой
задается формулой
 (7),
(7),
где  , снабженное ссылочным значением 4 на Фиг.1, такое, что
, снабженное ссылочным значением 4 на Фиг.1, такое, что  , задается формулой
, задается формулой
 (8)
(8)
и  задается формулой
задается формулой
 (9)
(9)
Из (7) выводится, что  и
и  являются, соответственно, параметрами l и m, которые максимизируют достаточную статистику
являются, соответственно, параметрами l и m, которые максимизируют достаточную статистику  , заданную формулой (8).
, заданную формулой (8).
На практике величина β, 5 на Фиг.1, устанавливается для порога обнаружения так, чтобы вероятность того, что статистика (8) превышает этот порог в отсутствии сигнала, исходящего от излучателя или отражателя, была равна некоторой величине, именуемой вероятностью ложной тревоги (ВЛТ). Соответственно, излучатель или отражатель обнаруживается для дальностной ячейки l и доплеровской ячейки m, если статистика (8) превышает порог β для пары (l, m).
Это принимающее устройство не требует допущения касательно каналов распространения, помех или испускаемого сигнала, так как последний частично или полностью известен (по завершении упомянутой выше демодуляции, например). Это принимающее устройство не требует зондирования пространства. Кроме того, оно не зависит от мощности вектора результата наблюдения, а значит, порог обнаружения не зависит от уровня шума, присутствующего на входе, поскольку, когда K больше нескольких единиц или десятков единиц, вероятностный закон в отношении статистики  приблизительно следует закону распределения вероятностей Гаусса и более не поддается действию закона взаимных помех, независимо от их уровней.
приблизительно следует закону распределения вероятностей Гаусса и более не поддается действию закона взаимных помех, независимо от их уровней.
Условия оптимальности в показателях знаменателя подобия
Начнем с оптимального момента обнаружения l0Te и оптимального доплеровского сдвига Δf0=m0/KTe, и в условиях ситуации с двумя допущениями H0: присутствие только суммарного шума в xm0((k+l0)Te), и H1: присутствие суммарного шума и полезного сигнала в xm0((k+l0)Te), что может быть выражено следующим образом:
H1 : xm0((k+l0)Te) ≈ s(kTe)hS+bTm0((k+l0)Te)(10a)
H0 : xm0((k+l0)Te) ≈ bTm0((k+l0)Te)
 (10b),
(10b),
при этом bTm0((k+l0)Te)=bT((k+l0)Te) exp[- j2πm0 ( k+l0)/K ],
в связи с этим, согласно статистической теории обнаружения (после Неймана Пирсона) [1], оптимальная стратегия для обнаружения сигнала, исходящего от излучателя или отражателя, s(kTe), основанная на результатах наблюдения xm0((k+l0)Te) на протяжении испускаемого сигнала, заключается в сравнении знаменателя подобия (RV), L(x)(l0, m0), с порогом, при этом знаменатель подобия задается формулой
 (11),
(11),
в которой p[xm0 ((k+l0)Te), 0≤k≤K-1/Hi] (i=0,1) является плотностью условной вероятности вектора [xm0(l0Te)T, xm0((1+l0)Te)T, …, xm0((K+l0-1)Te)T] T, данного допущения Hi. Это дает возможность показать, что принимающее устройство, характеризуемое (8), является достаточной статистикой для обеспечения оптимального обнаружения сигнала, исходящего от излучателя или отражателя в обобщенном смысле знаменателя подобия, если выполняются следующие условия:
A1: выборки bTm0((k+l0)Te) , 0≤k≤K-1 не коррелируют друг с другом,
A2: матрица R((k+l0)Te) не зависит от k,
A3: матрица R((k+l0)Te) неизвестна,
A4: вектор hS неизвестен,
A5: векторы bTm0((k+l0)Te) , 0≤k≤K-1 являются гауссовскими,
A6: векторы bTm0((k+l0)Te) , 0≤k≤K-1 являются кольцевыми до второго порядка.
Статистика (8) также может быть записана в форме, снабженной ссылочным значением 4:
 (12),
(12),
где  является выходом фильтра
является выходом фильтра  для вектора результата наблюдения xm((k+l)Te). Таким образом, из (12) выводится, что достаточная статистика
для вектора результата наблюдения xm((k+l)Te). Таким образом, из (12) выводится, что достаточная статистика  , 4, соответствует, с точностью до нормирующего множителя, результату корреляции 3 между известным сигналом s(kTe) и выходом, ym((k+l)Te), фильтра , как продемонстрировано на Фиг.3.
, 4, соответствует, с точностью до нормирующего множителя, результату корреляции 3 между известным сигналом s(kTe) и выходом, ym((k+l)Te), фильтра , как продемонстрировано на Фиг.3.
Фильтр является оценкой, в смысле наименьших квадратов, по K векторам результатов наблюдения, фильтра  , полученной при K→∞, которая минимизирует среднее по времени значение, на бесконечном интервале наблюдений, средней квадратичной ошибки между s(kTe) и выходом w†xm((k+l)Te), в которой
, полученной при K→∞, которая минимизирует среднее по времени значение, на бесконечном интервале наблюдений, средней квадратичной ошибки между s(kTe) и выходом w†xm((k+l)Te), в которой  и в которой <.> является операцией усреднения по времени, по k, на бесконечном интервале наблюдений. До тех пор, пока l и m остаются удаленными, соответственно, от l0 и m0, фильтр w(l, m) остается близким к нулю, что порождает статистические величины , которые также являются близкими к нулю, с точностью до оценочного шума с учетом конечной длительности испускаемого сигнала. Когда l и m, соответственно, приближаются к l0 и m0,
и в которой <.> является операцией усреднения по времени, по k, на бесконечном интервале наблюдений. До тех пор, пока l и m остаются удаленными, соответственно, от l0 и m0, фильтр w(l, m) остается близким к нулю, что порождает статистические величины , которые также являются близкими к нулю, с точностью до оценочного шума с учетом конечной длительности испускаемого сигнала. Когда l и m, соответственно, приближаются к l0 и m0,  увеличивается и достигает своего максимума при l=l0 и m=m0. В этом случае полезная часть вектора результата наблюдения xm0 ((k+l0)Te) и испускаемый сигнал s(kTe) находятся в фазе, фильтр w(l0, m0) соответствует, допуская статистическую независимость между суммарным шумом и испускаемым сигналом, следующему пространственному адаптированному фильтру (ПАФ):
увеличивается и достигает своего максимума при l=l0 и m=m0. В этом случае полезная часть вектора результата наблюдения xm0 ((k+l0)Te) и испускаемый сигнал s(kTe) находятся в фазе, фильтр w(l0, m0) соответствует, допуская статистическую независимость между суммарным шумом и испускаемым сигналом, следующему пространственному адаптированному фильтру (ПАФ):
 (13),
(13),
т.е. пространственному фильтру, который обеспечивает максимальный сигнал для отношения сигнал/смесь помехи с шумом (SINR - signal to interference plus noise ratio) на выходе, в котором  и
и  . И следовательно, C(l0, m0, K) записывается как
. И следовательно, C(l0, m0, K) записывается как
 (14),
(14),
где SINRy является SINR на выходе ПАФ, w(l0, m0), задаваемое формулой
 (15)
(15)
Функция C(l0, m0, K) является возрастающей функцией SINRy, стремящейся к единице при высоких значениях отношения сигнал/смесь помехи с шумом на выходе SINRy. Пока количество помех остается меньшим, чем количество чувствительных элементов, ПАФ (13) подавляет помехи при максимальном отношении сигнал/шум (SNR - signal to noise ratio) на выходе. В этих условиях операция корреляции между испускаемым сигналом и выходом оценки ПАФ генерирует максимальную корреляцию, исходя из ограниченного числа выборок K, минимальное значение которых, следовательно, должно возрастать при уменьшении SINR на выходе.
Таким образом, для каждой сканируемой дальностной/ доплеровской ячейки, вычисление связанного ПАФ позволяет максимизировать SINR на выходе отсеченного тракта, тогда как для стандартного принимающего устройства пространственный фильтр является постоянным для всех дальностных/доплеровских ячеек одной и той же пространственной ячейки.
Примечания
Временное допущение или обеспечивающая обнаружение дальностная ячейка дают информацию об относительном запаздывании/дальности от излучателя до принимающего устройства (и об абсолютном запаздывании/дальности, если на излучателе доступна синхронизирующая информация) или о дальности отражателя относительно излучателя и принимающего устройства.
Частотное допущение или обеспечивающая обнаружение доплеровская ячейка дают информацию об относительной скорости излучателя относительно принимающего устройства или о скорости отражателя относительно положений и кинематики излучателя и принимающего устройства.
Пространственная ячейка, связанная с обнаружением, определяется формулой  , при этом возможно предусмотреть обнаружение и одновременное определение характеристик всех присутствующих излучателей и отражателей, не интересуясь заранее их положением и без пространственного зондирования.
, при этом возможно предусмотреть обнаружение и одновременное определение характеристик всех присутствующих излучателей и отражателей, не интересуясь заранее их положением и без пространственного зондирования.
Предлагаемая операция обработки служит не только для использования стационарных или вращающихся направленных антенн, или на уровне задействованной системы излучения, или на уровне чувствительного элемента и способа, который является предметом настоящего изобретения, которые предусматривают поиск с разбивкой по секторам и обеспечивают дополнительное усиление антенны на фоне шума (повышенная чувствительность) и добавочное пространственное фильтрование помех.
Предлагаемая обработка может быть предусмотрена, даже если система излучения излучает различные сигналы одновременно, даже в одной и той же полосе частот ("цветные" излучения, например).
Пространствено-временные расширения способа для повышения эксплуатационных характеристик при наличии помех и множественных трасс распространения, и при неисправностях системы приема.
Когда имеется большое количество помех, например, когда сигнал, который будет обрабатываться, исходит от отражателя в присутствии сигналов, происходящих от множественных излучателей или от излучателей, связанных с множественными трассами распространения, или когда используемые системы приема демонстрируют определенные неисправности, вызывающие нестабильность или снижение чувствительности, можно увеличить число степеней свободы в способе и, следовательно, повысить его способность разнесения, его способность различать низкоскоростные излучатели и отражатели, и его чувствительность. Этапы, описанные выше в данном документе, используют временное предварительное фильтрование суммарного принимаемого сигнала, заключающееся, для каждого мешающего излучателя, в оценке суммарного вклада мешающего излучателя, в результате свертки сигнала, испускаемого источником помех при помощи фильтра распространения, который связан с ним, причем этот сигнал и этот фильтр оцениваются заранее, и затем в вычитании из поступающего сигнала суммарного вклада, обусловленного мешающим излучателем. Ниже в данном документе дается упрощенный иллюстративный вариант осуществления, в качестве иллюстрации и без ограничений, дополняемый Фиг.2, который представляет реализацию общего способа, описанного ранее, связанного с пространственно-временным предварительным фильтрованием, которое является предметом настоящего расширения.
Сильные помехи соответствуют, например, помехам со значением на 10-40 дБ больше, чем принимающее устройство, которое будет обнаруживаться.
Для предварительного фильтрования сигнала необходимо оценить сигнал sint(kTe), испускаемый источником помех, и канал gint(lTe) распространения сигнала, который связан с ним. Фиг.2 изображает различные возможности построения для sint.
Для этого различные способы могут реализовываться в зависимости от конкретного случая:
• если первоначально испускаемый мешающий сигнал sint полностью известен, когда источником помех является, например (не ограничиваясь этим), канальный акустический зонд, предварительно демодулируемый излучатель радиосвязи или радиовещания, радиолокатор или активный гидролокатор,
• способ оценивает фильтр, порождаемый распространением сигнала от мешающего излучателя на принимающее устройство, посредством какого-либо способа оценки, известного специалистам в данной области техники, например (не ограничиваясь этим), осуществляя поиск коэффициентов gint0= gint(l0Te), gint1= gint((l0+1).Te), …, gintL= gint((l0+L).Te) фильтра gint=(gint1, gint1, …, gintL) распространения, которые минимизируют, в момент l0, временной критерий наименьших квадратов  ниже в данном документе, оцениваемый в зависимости от сигнала x, воспринятого должным образом выбранной антенной, и в соответствии с опорным сигналом Sint=(sint((l0+l)Te),sint((l0+l+1)Te), …, sint((l0+l+L-1)Te))T по L временным выборкам.
ниже в данном документе, оцениваемый в зависимости от сигнала x, воспринятого должным образом выбранной антенной, и в соответствии с опорным сигналом Sint=(sint((l0+l)Te),sint((l0+l+1)Te), …, sint((l0+l+L-1)Te))T по L временным выборкам.
 (16)
(16)
Импульсная характеристика gint надлежащим образом восстановленного фильтра содержит все трассы распространения от излучателя до принимающего устройства.
Если первоначально испускаемый мешающий сигнал sint частично известен, когда источником помех является, например, излучатель системы связи, который стандартизирован или удовлетворяет известным техническим спецификациям: выравнивающий фильтр для принимаемого мешающего сигнала оценивается способами, известными специалистам в данной области техники; либо посредством временной и частотной синхронизации по заранее известным последовательностям в сигнале, если такие существуют, и приложения любого способа оценки gint, который известен специалистам в данной области техники, например (не ограничиваясь этим) минимизации упомянутого выше критерия , работая с целиком или частично известной частью сигнала sint, порождаемого излучателем; либо посредством временной и частотной синхронизации по заранее известным последовательностям в сигнале, если такие существуют, затем демодуляции/выравнивания целого мешающего сигнала sint и приложения любого способа оценки gint, который известен специалистам в данной области техники, например (не ограничиваясь этим) минимизации упомянутого выше критерия , используя часть восстановленного мешающего сигнала sint; либо, наконец, посредством слепых методов символьной синхронизации, восстановления/демодуляции/выравнивания несущей, в отношении принимаемого сигнала x, и используя априорно доступный на порожденном источником помех сигнале sint, для его восстановления, затем применяя любой способ оценки gint, известный специалистам в данной области техники, например (не ограничиваясь этим) минимизация упомянутого выше критерия , используя весь или часть восстановленного мешающего сигнала sint.
Заметим, что тот или другой из упомянутых выше этапов применяется, по существу, либо к сигналу x, принимаемому на конкретную, должным образом выбранную антенну, предназначенную, например, для демодуляции сигнала прямой связи (это является неограничивающим примером, представленным на Фиг.2), либо к сигналу, принимаемому на антенной сети, возможно той же, что и используемая для применения способа к полезному сигналу: в этом случае, упомянутое выше выражение критерия , которое нужно минимизировать, формально остается идентичным, принимая во внимание, для x((l0+l)Te), gint и sint ((l0+l)Te), сигнальные векторы размерности N×1, где N является числом антенн, и рассматривая векторную норму в пространстве N-мерных комплексных векторов. В этом случае получается пространственно-временная (уже не только временная) оценка импульсной характеристики канала распространения между источником помех и чувствительным элементом.
В результате того или другого из упомянутых выше этапов, фильтр распространения gint между мешающим излучателем и принимающим устройством выводится в дополнение к сигналу, порожденному источником помех sint(kTe).
Кроме того, вводя доплеровские допущения в опорный сигнал sint и используя повторения и цикличность сигнала sint в качестве основы, можно точно оценить относительные уходы гетеродинов, смесителей частот и тактовых генераторов чувствительного элемента.
Этап 6B) Когда выбранный мешающий излучатель или является стационарным, или известны его положение и кинематика, и он более стабилен, чем чувствительный элемент, оцененные уходы используются при применении способа, который является предметом настоящего изобретения, чтобы увеличить времена интегрирования (т.е. увеличить параметр K) и, следовательно, повысить чувствительность способа, его доплеровское разрешение и его способность различать низкоскоростные излучатели или отражатели. Наконец, повторение этого расширения способа на нескольких мешающих излучателях позволяет дополнительно уточнить оценки перед коррекцией сигналов, описываемой ниже в данном документе.
Этап 6C) Далее полезный сигнал, составляющая суммарного сигнала на антенной сети, предварительно фильтруется посредством свертки сигнала от мешающего излучателя sint при помощи упомянутой выше оценки фильтра распространения gint излучателя-принимающего устройства, а затем вычитания вклада, являющегося результатом этой операции, из суммарного сигнала, принимаемого на антенне. Таким образом, большая часть энергетических вкладов, обусловленных мешающим излучателем (прямой тракт + множественные тракты), устраняется при помощи (временной) обработки, относительный вклад и отношение сигнал-помеха полезного сигнала, исходящего от излучателя или отражателя, сильно увеличивается в сигнале, полученном в результате этого предварительного фильтрования. Затем способ изобретения применяется к сигналу x', полученному из входного сигнала x по завершении этого предварительного фильтрования, которое, таким образом, способствует общей чувствительности и общим значениям характеристик.
Этап 6D) Благодаря оценке и компенсации уходов тактового генератора и уходов местного гетеродина, значение K числа выборок, которые могут использоваться при реализации способа, следовательно, и доплеровское разрешение, способность различать низкоскоростные отражатели, и выигрыш от обработки и чувствительность способа тоже сильно повышаются в результате этого расширения.
Расширение способа, когда суммарный шум является бесцикловым
Фиг.3 представляет другой иллюстративный вариант осуществления, когда помехи демонстрируют характеристику нецикличности, этапы, реализуемые в расширении упомянутого выше способа, эксплуатируют эту характеристику. Такое принимающее устройство может предусматриваться независимо от характеристики нецикличности испускаемого сигнала. Наиболее подходящим является случай, когда испускаемый сигнал прямолинеен, другими словами, для которого его комплексная огибающая s(kTe) имеет реальные значения. Это имеет место, в частности, для испускаемых сигналов с амплитудной модуляцией (AM, ASK) или с 2-позиционной фазовой модуляцией (BPSK). В этих условиях выгодно заменить достаточную статистику (8) статистикой  , 10 на Фиг.3, определяемую формулой
, 10 на Фиг.3, определяемую формулой
 (17),
(17),
в которой  , и в которой
, и в которой  и
и  определяются (5) и (6), в которых
определяются (5) и (6), в которых  заменяется на
заменяется на  , 6 на Фиг.3, функциональной схеме достаточной статистики (16).
, 6 на Фиг.3, функциональной схеме достаточной статистики (16).
Статистика (17) расширяется на испускаемые сигналы, которые становятся квазипрямолинейными после предварительной обработки с обратным циклическим сдвигом. Это имеет место, в частности, для типов испускаемых сигналов с π/2-BPSK или OQPSK (квадратурная фазовая модуляция со сдвигом) или даже определенных непрерывных фазовых модуляций (CPM), то есть с частотной модуляцией и с непрерывной фазой, такие, например, как сигналы с MSK (манипуляция с минимальным сдвигом) и GMSK (гауссова манипуляция с минимальным сдвигом). В этих условиях должна быть реализована достаточная статистика (17), но с заменой пространственных векторов на пространственно-временные векторы, подвергнутые обратному циклическому сдвигу с L временными захватами
 , если L является нечетным, и
, если L является нечетным, и  , если L является четным, где
, если L является четным, где  ,
,  ,
,  и T является символьным временем испускаемого сигнала.
и T является символьным временем испускаемого сигнала.
Расширение способа, когда направляющий вектор отражателя известен или предполагается
Номинальное расширение
Когда имеет место распространение в свободном пространстве, полезный канальный вектор hs выражается формулой , в которой ϕS и s, соответственно, представляют собой фазу и направляющий вектор сигнала, исходящего от излучателя или отражателя. Когда предусматривается пространственное зондирование пространства, как в случае стандартных систем обнаружения, можно считать, что вектор s известен при сканировании пространственной ячейки излучателя или отражателя. В этих условиях, с учетом допущений A1 - A6, но с заменой допущения A4 на допущение A4' в отношении отдельной неизвестной фазы ϕS, стандартные системы обнаружения оказываются оптимальными только для сигналов, исходящих от маломощных излучателей или отражателей, и становятся близкими к оптимальным для сигналов, исходящих от излучателей или отражателей большой мощности. В этих условиях оптимизация значения характеристик обнаружения для всех уровней сигнала может оказаться полезной при условии, что планируются очень низкие ВЛТ.
В определенных условиях достаточная статистика для обнаружения известного сигнала s(kTe) в течение отрезка времени 0≤k ≤K-1 в пространственной ячейке s, дальностной ячейке l и доплеровской ячейке m задается, как указано ссылочными значениями 13, 12, 14 на Фиг.4, формулой
 (18),
(18),
в которой  , 12, определяется (8). Выражение (17) представляет собой расширение для (8), когда известен вектор s. Для низких значений SINRy (SINRy << 1), из (16) выводится, что
, 12, определяется (8). Выражение (17) представляет собой расширение для (8), когда известен вектор s. Для низких значений SINRy (SINRy << 1), из (16) выводится, что  и статистика (17) может приближенно выражаться формулой
и статистика (17) может приближенно выражаться формулой
 (19),
(19),
которая соответствует структуре, традиционно используемой при адаптивном формировании канала,  , 14, только нормированной членом
, 14, только нормированной членом  , который предусматривает регулирование порога обнаружения β, 15, для данной ВЛТ независимо от входной мощности шума или помех. С другой стороны, для значений SINRy, которые уже не низкие, оптимальное устройство обнаружения с известным s применяет статистику
, который предусматривает регулирование порога обнаружения β, 15, для данной ВЛТ независимо от входной мощности шума или помех. С другой стороны, для значений SINRy, которые уже не низкие, оптимальное устройство обнаружения с известным s применяет статистику  , разъясненную ранее, ввиду того, что пространственный фильтр
, разъясненную ранее, ввиду того, что пространственный фильтр  в этом случае сходится быстрее, чем фильтр
в этом случае сходится быстрее, чем фильтр  , как показывается в [3]. Функциональная схема достаточной статистики (17) показана на Фиг.4.
, как показывается в [3]. Функциональная схема достаточной статистики (17) показана на Фиг.4.
Имеется в распоряжении контрольный уровень только суммарного шума, и упомянутые выше этапы реализуются, исходя из оценки матрицы только суммарного шума  , полученной с помощью контрольных выборок только шума, вместо оценки корреляционной матрицы результатов наблюдений,
, полученной с помощью контрольных выборок только шума, вместо оценки корреляционной матрицы результатов наблюдений,  .
.
Бесцикловое расширение
Когда помехи демонстрируют характеристику нецикличности, может использоваться принимающее устройство, способное к эксплуатации этой характеристики, даже в тех случаях, когда s считается известным. Хотя реализация такого принимающего устройства может быть предусмотрена независимо от характеристики нецикличности испускаемого сигнала, наиболее подходящим также является случай, при котором испускаемый сигнал прямолинеен. В этих условиях выгодно заменить достаточную статистику (17) статистикой  , определяемой формулой
, определяемой формулой

 (20),
(20),
в которой M является матрицей (N×2), определяемой формулой
(21)
Статистика (20) расширяется для испускаемых сигналов, которые становятся квазипрямолинейными после предварительной обработки с обратным циклическим сдвигом. В этих условиях должна быть реализована достаточная статистика (20), но с заменой пространственных векторов на пространственно-временные векторы, подвергнутые обратному циклическому сдвигу с L временными захватами,  , определенные в предшествующем параграфе.
, определенные в предшествующем параграфе.
Бесцикловое расширение с контрольным уровнем только шума
Для некоторого числа приложений контрольный уровень только для шума плюс помехи доступен в результате принятия вторичных данных, лишенных какого-либо полезного сигнала. Таким является, например, случай, когда эти вторичные данные могут исходить из дальностных-доплеровских ячеек, граничащих с теми, которые связаны с присутствием полезного сигнала, который нужно обнаружить. В этих условиях корреляционная матрица  расширенного суммарного шума,
расширенного суммарного шума,  , может оцениваться исходя из этих вторичных данных при помощи любой оценочной функции корреляционной матрицы. После этого может быть реализовано бесцикловое устройство обнаружения с использованием контрольного уровня только суммарного шума. Такое устройство обнаружения может представлять собой либо принимающее устройство (17), если s неизвестен, либо принимающее устройство (20), если s известен, но с заменой
, может оцениваться исходя из этих вторичных данных при помощи любой оценочной функции корреляционной матрицы. После этого может быть реализовано бесцикловое устройство обнаружения с использованием контрольного уровня только суммарного шума. Такое устройство обнаружения может представлять собой либо принимающее устройство (17), если s неизвестен, либо принимающее устройство (20), если s известен, но с заменой  на
на  , полученную с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,
, полученную с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,  , в которой
, в которой  .
.
Таким же образом принимающие устройства с использованием контрольного уровня только суммарного шума, которые используют и основные данные (сигнал плюс суммарный шум) и вторичные данные, тоже могут быть построены согласно той же методологии.
Расширение для широкополосных источников
Если принимаемые источники (полезные сигналы, исходящие от излучателя или от отражателя, помехи) являются широкополосными для используемой антенной сети, что происходит, когда отношения Be/f0 или πDBe/c превышают несколько %, где D является апертурой сети, Be является эквивалентной шириной полосы частот сигнала (считается входящей в диапазон приема), f0 является несущей частотой сигнала и c является скоростью распространения, упоминаемые выше значения характеристик обработки ухудшаются, и могут быть реализованы следующие два варианта осуществления:
первый заключается в сведении диапазона приема к нескольким поддиапазонам, узким относительно сети, и в реализации упоминаемых выше операций обработки по поддиапазонам. Преимущество такой стратегии состоит в том, что параллельно организуются относительно простые операции обработки;
второй заключается в реализации приемной пространственно-временной структуры.
В случае, когда сигнал больше не является узкополосным для сети чувствительных элементов (πDB/c, превышает несколько %): заменяют упомянутые выше пространственные векторы xm((k+l)Te) на пространственно-временные векторы с L временными захватами:  , если L является нечетным, и
, если L является нечетным, и  , если L является четным.
, если L является четным.
В случае, когда сигнал также является широкополосным по сравнению с несущей частотой (Be/f0, превышающее несколько %) и в случае, когда кинематика излучателя или отражателя подразумевает искажения, наведенные на опорный сигнал s, которые должны учитываться: вводят в упомянутые выше операции обработки не только переменную запаздывания lTe и доплеровскую переменную m/(KTe), но и дополнительные переменные первого порядка, такие, как сжатие запаздывания и доплеровское сжатие по времени K интегрирования, переменные второго порядка, такие, как временные уходы упомянутых выше переменных, и т.д., записывают сигнал sl,m, соответствующий преобразованию исходного сигнала s, при помощи временных переменных (запаздывание-положение, и т.д.), обозначенных l, и частотных переменных (доплеровские-кинематические, и т.д.), обозначенных m, и используют сигнал sl,m для реализации этапов способа по предшествующим пунктам, и применяют способ изобретения к этому сигналу sl,m.
Такой подход обладает тем преимуществом, что не привносятся какие-либо потери в разрешение по дальности.
Дополняющие операции обработки
Могут предусматриваться дополняющие операции обработки с использованием одной из структур, описанных ранее. В частности, могут предусматриваться методы измерения углов с высоким разрешением, направленные на определение углового положения всех излучателей данной дальностной/доплеровской ячейки, либо основанные на результатах наблюдений  ,
,  или , связанных с этой дальностной/доплеровской ячейкой, или основанные на результатах корреляции результатов наблюдений с испускаемым сигналом s(kTe) по интервалам, которые в целое число раз больше или меньше K, другими словами, основанные на векторах
или , связанных с этой дальностной/доплеровской ячейкой, или основанные на результатах корреляции результатов наблюдений с испускаемым сигналом s(kTe) по интервалам, которые в целое число раз больше или меньше K, другими словами, основанные на векторах  , K', делящееся на K, или K, делящееся на K', что является случаем базового измерения углов.
, K', делящееся на K, или K, делящееся на K', что является случаем базового измерения углов.
В случае, когда s известен, эти методы могут быть реализованы после пространственной фильтрации результатов наблюдений, ограниченных пространственной ячейкой s.
Способ изобретения, например, используется с приемной системой в известном положении и противостоящими излучателями или отражателями, информация синхронизации, положения или кинематики о которых доступна при испускании или отражении сигналов, используемых настоящим изобретением, что позволяет благодаря настоящему изобретению получать абсолютную временную информацию (запаздывание/дальность) и абсолютную частотную информацию (скорость/абсолютная доплеровская частота), основываясь на относительной информации, произведенной при помощи способа, который является предметом настоящего изобретения.
Согласно одной иллюстративной реализации, использование способа дублируется на нескольких приемных системах, которые синхронизируются и обмениваются информацией друг с другом, или с центром управления, для представления информации синхронизации, положения или кинематики касательно излучателей и отражателей, чтобы получать абсолютную временную и частотную информацию об излучателях и отражателях.
Способ изобретения может использоваться в одном из следующих приложений: замер канала распространения (зондирование), измерения сетей радиосвязи или радиовещания, демодуляция и измерение углов излучателей системы связи, активный и пассивный радиолокатор, активный гидролокатор, запрос свой-чужой, более известный по выражению "Опознавание Своего и Неприятеля (IFF - Identification Friend and Foe)".
Согласно варианту осуществления, в способе подвергнутые доплеровскому сдвигу и смещенные во времени векторы результатов наблюдений , ,  или , соответственно, заменяются, например, векторами результатов наблюдений без доплеровского сдвига (m=0) и не смещенными во времени (l=0), x(kTe),
или , соответственно, заменяются, например, векторами результатов наблюдений без доплеровского сдвига (m=0) и не смещенными во времени (l=0), x(kTe),  , xST(kTe) или
, xST(kTe) или  , и в таком случае контрольный сигнал s(kTe) подвергается доплеровскому сдвигу и смещается во времени, то есть заменяется на sm((k+l)Te)= s(kTe) exp [j2πm (k+l)/K].
, и в таком случае контрольный сигнал s(kTe) подвергается доплеровскому сдвигу и смещается во времени, то есть заменяется на sm((k+l)Te)= s(kTe) exp [j2πm (k+l)/K].
Способ изобретения может включать в себя стандартные этапы измерения углов (с высоким разрешением или другие) или ссылаться на этапы измерения углов, основываясь на запаздывания-дальностном/доплеровском-кинематическом или пространственном/запаздывания-дальностном/доплеровском-кинематическом допущениях, содержащие реализацию метода измерения углов
• либо на основании результатов наблюдений , ,  или , связанных с энергией дальность/доплеровская частота (l, m),
или , связанных с энергией дальность/доплеровская частота (l, m),
• либо на основании результатов корреляции с испускаемым сигналом s(kTe) результатов наблюдений , , или по интервалам, которые в целое число раз меньше K,
• в случае, когда направляющий вектор s известен, после возможного пространственного фильтрования результатов наблюдений, ограниченных пространственной ячейкой s.
Устройство и способ настоящего изобретения позволяют, в частности, измерять распространение, обнаруживать и/или определять местоположение стационарного или подвижного излучателя или отражателя в системе, содержащей N чувствительных элементов, принимающих сигналы от излучателя или отражателя, вместе, по меньшей мере, с одним средством, позволяющим исполнить этапы способа.
Согласно варианту осуществления, направляющий вектор излучателя или отражателя известен, и способ включает в себя следующие этапы, на которых:
• оценивают вектор , исходя из K известных выборок, s(kTe), испускаемого сигнала и K смещенных по частоте результатов наблюдений, xm((k+l)Te)=x (( k+l) Te) exp [ -j2πm ( k+l )/K ], 0 ≤ k ≤ K-1,
• оценивают матрицу , исходя из K смещенных по частоте результатов наблюдений, xm((k+l)Te)=x ((k+l) Te) exp [-j2πm (k+l)/K], 0≤k≤K-1,
• вычисляют достаточную статистику где определяется (9),
• вычисляют достаточную статистику
• устанавливают порог обнаружения для заданной вероятности ложной тревоги,
• сравнивают величину статистики  с установленным порогом обнаружения и, если это пороговая величина превышена, дают команду на обнаружение отражателя в дальностной/доплеровской ячейке (l, m) и пространственной ячейке s,
с установленным порогом обнаружения и, если это пороговая величина превышена, дают команду на обнаружение отражателя в дальностной/доплеровской ячейке (l, m) и пространственной ячейке s,
• оценивают относительное запаздывание и дальность излучателя или отражателя, исходя из l,
• оценивают доплеровскую частоту и относительную скорость/кинематику излучателя или отражателя, исходя из m,
• оценивают угловое положение отражателя, исходя из s.
Источники информации
[1] H.L. VAN TREES, "Detection, Estimation and Modulation Theory", Часть I, II, III, Издательство Wiley and Sons, 1971.
[2] J. DARRICAUT, "Physique et Théorie du radar", Тома 1, 2, 3, Издательство Sodipe, 1993.
[3] R.A. MONZINGO, T.W MILLER, "Introduction to adaptive arrays", Издательство John Wiley and sons, 1981.
[4] W.S. BURDIC, "Underwater Acoustic System Analysis", Издательство Prentice Hall Sig, Выпуск докладов, 2-я редакция, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
| СПОСОБ ОБРАБОТКИ СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2016 |
|
RU2624005C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2378660C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2009 |
|
RU2407034C9 |
| СПОСОБ ПРИЕМА, ПРИЕМНИК, СПОСОБ ПЕРЕДАЧИ, ПЕРЕДАТЧИК, ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА И УСТРОЙСТВО СВЯЗИ | 2018 |
|
RU2710926C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ЧЕТЫРЕХКАНАЛЬНОЙ ДОПЛЕРОВСКОЙ РЛС | 2014 |
|
RU2572357C1 |
Способ измерения параметров импульсной характеристики канала распространения при наличии излучателей и отражателей, стационарных или подвижных, предназначен для обнаружения и определения параметров положения и кинематики этих излучателей и отражателей, или для автоматического определения местоположения приемной системы при реализации настоящего изобретения, при этом система содержит N чувствительных элементов, принимающих сигналы от упомянутых излучателей или результат отражения от упомянутых отражателях, причем способ содержит, по меньшей мере, следующие этапы: определение функции неопределенности, которая увязывает пространственный анализ и запаздывание-дальностный/доплеровский-кинематический анализ, определение, по меньшей мере, одной достаточной статистики, соответствующей корреляции между известным сигналом, соответствующим комплексной огибающей испускаемого сигнала, и выходом фильтра w(l, m), где l представляет собой временное допущение, a m - частотное допущение, определение значений пары (l, m) путем сравнения значения статистики для пары (l, m) с пороговым значением. Достигаемый технический результат - повышение эффективности определения импульсной характеристики каналов распространения электромагнитных или акустических волн. 2 н. и 16 з.п ф-лы, 4 ил.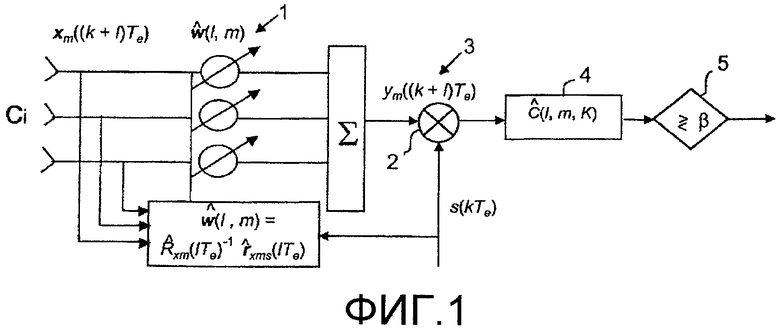
1. Способ определения одного или более параметров импульсной характеристики канала распространения при наличии излучателей, отражателей или чувствительных элементов, стационарных или подвижных, для обнаружения и для определения положения и кинематических параметров этих излучателей и отражателей в системе, содержащей N чувствительных элементов, принимающих сигналы от упомянутых излучателей или отражение на упомянутых отражателях, при N ≥ 2, и содержащий, по меньшей мере, следующие этапы, на которых:
используют взаимосвязь пространственного анализа и запаздывания-дальностного/доплеровского-кинематического анализа для определения функции неопределенности,
определяют, по меньшей мере, одну достаточную статистику  , соответствующую корреляции между известным сигналом s(kTe), соответствующим комплексной огибающей испускаемого сигнала, который подвергнут возможному преобразованию, связанному с допущениями касательно положений и кинематики излучателей, принимающих устройств и отражателей и касательно колебаний распространения, и выходом пространственного фильтра w(l, m), где l обозначает набор временных допущений; m обозначает набор частотных допущений, который получает в качестве входных данных результаты наблюдений xm((k+1)Те), 0≤k≤K-1, где Те является периодом выборки чувствительного элемента, принимающего сигналы, определяют значения пары (l, m) путем сравнения значения статистики для пары (l, m) с пороговым значением обнаружения.
, соответствующую корреляции между известным сигналом s(kTe), соответствующим комплексной огибающей испускаемого сигнала, который подвергнут возможному преобразованию, связанному с допущениями касательно положений и кинематики излучателей, принимающих устройств и отражателей и касательно колебаний распространения, и выходом пространственного фильтра w(l, m), где l обозначает набор временных допущений; m обозначает набор частотных допущений, который получает в качестве входных данных результаты наблюдений xm((k+1)Те), 0≤k≤K-1, где Те является периодом выборки чувствительного элемента, принимающего сигналы, определяют значения пары (l, m) путем сравнения значения статистики для пары (l, m) с пороговым значением обнаружения.
2. Способ по п.1, отличающийся тем, что для случаев, когда временные параметры, обозначенные l, сводятся к запаздыванию или к дальности и когда кинематические параметры, обозначенные m, сводятся к доплеровской частоте или к относительной скорости, способ содержит, по меньшей мере, следующие этапы, на которых:
для каждого допущения l запаздывания и каждого доплеровского допущения m, где m является доплеровским/кинематическим параметром, индексирующим переменные xm и  ,
,
- оценивают вектор  исходя из K известных выборок, s(kTe), из испускаемого сигнала и из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1;
исходя из K известных выборок, s(kTe), из испускаемого сигнала и из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1;
- оценивают матрицу  исходя из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1;
исходя из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1;
- вычисляют достаточную статистику  где
где  определяется оценкой по методу наименьших квадратов средней мощности известного сигнала,
определяется оценкой по методу наименьших квадратов средней мощности известного сигнала,
- устанавливают порог обнаружения для заданной вероятности ложной тревоги,
- сравнивают статистику  с фиксированным порогом и дают команду на обнаружение излучателя или отражателя в дальностной/доплеровской ячейке (l, m), если порог превышен,
с фиксированным порогом и дают команду на обнаружение излучателя или отражателя в дальностной/доплеровской ячейке (l, m), если порог превышен,
- оценивают относительное запаздывание и дальность излучателя или отражателя исходя из l,
- оценивают относительную доплеровскую частоту и скорость излучателя или отражателя исходя из m,
- оценивают пространственную ячейку излучателя или отражателя исходя из направляющего вектора  на антенне сигнала, исходящего от излучателя или отражателя, задаваемого как
на антенне сигнала, исходящего от излучателя или отражателя, задаваемого как  .
.
3. Способ по п.2, отличающийся тем, что в более сложных случаях,
3А) временные параметры вводятся в определение, такие как запаздывания-положения, обозначенные l, в определение частотных параметров, таких как доплеровские-кинематические, обозначенных m, и в определение известного сигнала s по каждому допущению l и m, переменные и преобразования сигнала, вызванные перемещениями излучателя, принимающего устройства или отражателя и колебаниями канала распространения, в зависимости от допущения запаздывание-положение, допущения относительной доплеровской частоты-скорости, времени интегрирования при обработке эквивалентной ширины полосы частот сигнала, эквивалентной продолжительности сигнала и его периодичности в импульсном режиме на протяжении времени интегрирования обработки, от колебания запаздывания за это время, от колебания доплеровской частоты за это время,
3В) сигнал sl,m, полученный в результате преобразования s, используется согласно временным допущениям, обозначенным l, и частотным допущениям, обозначенным m.
4. Способ по п.3, отличающийся тем, что колебание запаздывания является колебанием, моделируемым до первого порядка временным пилообразным изменением.
5. Способ по п.3, отличающийся тем, что доплеровское колебание моделируется до первого порядка пилообразным изменением доплеровской частоты.
6. Способ по любому из пп.2 и 3, отличающийся тем, что для обнаружения излучателя или отражателя, сигнал которых подвержен сильным помехам, сигнал x'm((k+1)Te) и опорный сигнал s' используются вместо входного сигнала xm((k+1)Te) и исходного опорного сигнала s, при этом сигнал x'm((k+1)Te) получается из сигнала xm((k+1)Te), а опорный сигнал s' получается из исходного опорного сигнала s или из преобразованного опорного сигнала sl,m посредством операций, влекущих за собой усиление пространственно-временных фильтров, таких как следующие:
6А) для каждого мешающего излучателя:
оценка импульсной характеристики gint фильтра распространения от излучателя на принимающее устройство путем минимизации критерия

причем опорный сигнал Sint=(sint((l0+1)Te),sint((l0+l+1)Te), …, sint((l0+1+L-1)Te))T или Sint,m,l ″=(sint,m,l »((l0+1)Te),sint,m,l »((l0+l+1)Te), …, sint,m,l »((l0+1+L-1)Te))T получается либо благодаря общему априорному знанию исходного мешающего сигнала, либо благодаря частичному априорному знанию исходного мешающего сигнала, либо благодаря демодуляции/выравниванию исходного мешающего сигнала любыми известными специалистам в данной области техники средствами, и проведению возможного преобразования до Sint,m,l,
6В) для одного или более мешающих излучателей, стационарных или с известной кинематикой, и которые выбираются согласно их частоте и временной устойчивости,
различные частотные допущения вводятся в опорный сигнал Sint, и повторения, присутствующие в опорном сигнале, используются для того, чтобы точно оценить на больших длинах K интегрирования отклонения частоты и времени в отношении мешающего излучателя, уходы в отношении мешающего излучателя оцениваются для местных гетеродинов смесителей и тактовых генераторов системы для приема и выборки сигналов, используемой для реализации настоящего изобретения.
7. Способ по п.6, отличающийся тем, что в ходе этапа 6В:
фильтр распространения gint, связанный с мешающим излучателем, обновляется (этап 6А), и
6С) для каждого мешающего излучателя,
свертывание исходного sint или преобразованного sint,m,l мешающего сигнала исполняется с помощью фильтра распространения gint, который связан с ним, и сигнал, полученный в результате этой операции, вычитается из суммарного принятого сигнала,
6D) уходы частоты и времени компенсируются
- либо на сигнале, полученном из xm((k+)Te) после упомянутых выше операций, с целью получения сигнала x'm((k+1)Te), s в таком случае остается неизменным (s'=s);
- либо на опорном сигнале, используемом в способе, s по п.(2), таким образом, становится s', sm,l по п.3, таким образом, становится sm,l';
6Е) реализация этапов по п.2 при x'm и s';
6F) реализация этапов по п.3 при x'm и sm,l'.
8. Способ по п.2, отличающийся тем, что используется вектор результата наблюдения  , состоящий из вектора результата наблюдения и его сопряженного комплекса, при этом этапы по пп.2 и 3 реализуют на основании
, состоящий из вектора результата наблюдения и его сопряженного комплекса, при этом этапы по пп.2 и 3 реализуют на основании  вместо xm((k+1)Te).
вместо xm((k+1)Te).
9. Способ по п.8, отличающийся тем, что также имеется в распоряжении контрольный уровень только суммарного шума, при этом этапы по пп.2 и 3 реализуют с использованием оценки расширенной матрицы только суммарного шума,  , полученной с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,
, полученной с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,  , в которой
, в которой  .
.
10. Способ по п.2, отличающийся тем, что испускаемые сигналы являются квазипрямолинейными после обратного циклического сдвига и помехи не являются циклическими или каналы распространения являются рассеянными во времени, в котором используются пространственно-временные векторы, подвергнутые обратному циклическому сдвигу для квазипрямолинейных модуляций или не подвергнутые обратному циклическому сдвигу для прямолинейных модуляций, с L временными захватами  , если L является нечетным, и
, если L является нечетным, и
 если L является четным,
если L является четным,
где 

 и Т является продолжительностью символа.
и Т является продолжительностью символа.
11. Способ по п.2, отличающийся тем, что направляющий вектор излучателя или отражателя известен и при этом способ содержит следующие этапы, на которых
- оценивают вектор  исходя из K известных выборок, s(kTe), из испускаемого сигнала и из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1,
исходя из K известных выборок, s(kTe), из испускаемого сигнала и из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1,
- оценивают матрицу  исходя из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1,
исходя из K результатов наблюдений, которые смещаются по частотам, xm((k+1)Te)=x((k+1)Te)exp[-j2πm(k+1)/K], 0≤k≤K-1,
- вычисляют достаточную статистику  где
где  определяется (9),
определяется (9),
- вычисляют достаточную статистику

- устанавливают порог обнаружения для заданной вероятности ложной тревоги,
- сравнивают величину статистики  с фиксированным порогом обнаружения и в случае, если это пороговая величина превышена, дают команду на обнаружение отражателя в дальностной/доплеровской ячейке (l, m) и пространственной ячейке s,
с фиксированным порогом обнаружения и в случае, если это пороговая величина превышена, дают команду на обнаружение отражателя в дальностной/доплеровской ячейке (l, m) и пространственной ячейке s,
- оценивают относительное запаздывание и дальность излучателя или отражателя исходя из 1,
- оценивают относительную доплеровскую частоту и скорость/кинематику излучателя или отражателя исходя из m,
- оценивают угловое положение отражателя, исходя из s.
12. Способ по п.2, отличающийся тем, что имеется в распоряжении контрольный уровень только суммарного шума, при этом этапы по пп.2, 3 или 7 реализуются исходя из оценки матрицы только суммарного шума,  , полученной с помощью контрольных выборок только шума, вместо оценки корреляционной матрицы результатов наблюдений,
, полученной с помощью контрольных выборок только шума, вместо оценки корреляционной матрицы результатов наблюдений,  .
.
13. Способ по п.2, отличающийся тем, что направляющий вектор отражателя известен для прямолинейных испускаемых сигналов и потенциально бесцикловых помех, при этом способ содержит, по меньшей мере, следующие этапы, на которых:
вычисляют достаточную статистику

строят матрицу
строят статистику


устанавливают порог обнаружения для заданной вероятности ложной тревоги,
сравнивают величину статистики  с порогом и обнаруживают излучатель или отражатель в дальностной/доплеровской ячейке (l, m) и пространственной ячейке s, если порог превышен,
с порогом и обнаруживают излучатель или отражатель в дальностной/доплеровской ячейке (l, m) и пространственной ячейке s, если порог превышен,
оценивают относительное запаздывание и дальность излучателя или отражателя исходя из l,
оценивают относительную доплеровскую частоту и скорость/кинематику излучателя или отражателя исходя из m,
оценивают угловое положение излучателя или отражателя, исходя из s.
14. Способ по п.2, отличающийся тем, что также имеется в распоряжении контрольный уровень только суммарного шума, при этом этапы по п.13 реализуют с использованием оценки расширенной матрицы только суммарного шума,  , полученной с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,
, полученной с помощью контрольных выборок только шума, вместо оценки расширенной корреляционной матрицы результатов наблюдений,  , где
, где  .
.
15. Способ по п.2, отличающийся тем, что, подвергнутые доплеровскому сдвигу и смещенные во времени векторы результатов наблюдений  ,
, 
 или
или  соответственно заменяют не подвергнутыми доплеровскому сдвигу (m=0) и несмещенными во времени (l=0) векторами результатов наблюдений x(kTe),
соответственно заменяют не подвергнутыми доплеровскому сдвигу (m=0) и несмещенными во времени (l=0) векторами результатов наблюдений x(kTe),  xST(kTe) или
xST(kTe) или  при этом контрольный сигнал s(kTe) подвергается доплеровскому сдвигу и смещается во времени, то есть заменяется на sm((k+1)Te)=s(kTe)exp[j2πm(k+1)/K].
при этом контрольный сигнал s(kTe) подвергается доплеровскому сдвигу и смещается во времени, то есть заменяется на sm((k+1)Te)=s(kTe)exp[j2πm(k+1)/K].
16. Способ по п.2, отличающийся тем, что, когда сигналы, исходящие от излучателя, отражателя, или помехи являются широкополосными для используемой антенной решетки, что происходит, как только отношения Be/f0 или πDBe/с превышают несколько %, где D является апертурой антенной решетки, Be является эквивалентной шириной полосы частот сигнала (считается входящей в диапазон приема), f0 является несущей частотой сигнала и с является скоростью распространения, реализует один из следующих вариантов:
- структурируют диапазон приема в виде нескольких поддиапазонов, узких для антенной решетки;
- реализуют операции обработки, которые являются предметом предшествующих пунктов, в одном поддиапазоне за один раз,
- реализуют приемную пространственно-временную структуру,
- в случае когда сигнал больше не является узкополосным для массива чувствительных элементов (πDB/с, превышает несколько %): подменяют упомянутые выше пространственные векторы xm((k+1)Te) пространственно-временными векторами с L временными захватами:  , если L является нечетным, и
, если L является нечетным, и
 , если L является четным,
, если L является четным,
в случае, когда сигнал также является широкополосным по сравнению с несущей частотой (Be/f0, превышающее несколько %), и в случае, когда кинематика излучателя или отражателя подразумевает искажения, наведенные на опорный сигнал s, которые должны учитываться: вводят в упомянутые выше операции обработки не только переменную запаздывания и доплеровскую переменную, но и дополнительные переменные 1 порядка, такие как сжатие запаздывания и доплеровское сжатие по времени K интегрирования, 2 порядка, такие как временные производные упомянутых выше переменных, и т.д., записывают сигнал sl,m, соответствующий преобразованию исходного сигнала s, при помощи временных переменных (запаздывание-положение, и т.д.), обозначенных l, и частотных переменных (доплеровские-кинематические, и т.д.), обозначенных m, и используют сигнал sl,m для реализации этапов способа по предшествующим пунктам.
17. Способ по п.2, отличающийся тем, что содержит стандартные этапы измерения углов (с высоким разрешением или другие) или измерения углов со ссылкой, основываясь на запаздывания-дальностном/доплеровском-кинематическом или пространственном/запаздывания-дальностном/доплеровском-кинематическом допущениях, содержащие реализацию метода измерения углов, стандартного или с высоким разрешением:
- исходя из результатов наблюдений  ,
,  ,
, 
или  , связанных с энергией дальность/доплеровская частота (l, m),
, связанных с энергией дальность/доплеровская частота (l, m),
- исходя из результатов корреляции с испускаемым сигналом s(kTe) результатов наблюдений  ,
, 
 или
или  по интервалам, которые в целое число раз меньше K,
по интервалам, которые в целое число раз меньше K,
- в случае, когда направляющий вектор s известен, после возможного пространственного фильтрования результатов наблюдений, ограниченных пространственной ячейкой s.
18. Устройство для измерения распространения, обнаружения и/или определения местоположения стационарного или подвижного излучателя или отражателя в системе, содержащей N чувствительных элементов, принимающих сигналы от излучателя или отражателя, которое содержит, по меньшей мере, одно средство, пригодное для исполнения этапов способа по одному из пп.1-17.
| Способ юстировки антенны в угломестной плоскости | 1986 |
|
SU1500951A1 |
| FR 2854290 А, 29.10.2004 | |||
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 2000 |
|
RU2282944C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ОГРАНИЧЕННЫМ СПЕКТРОМ (ВАРИАНТЫ) | 2004 |
|
RU2265278C1 |
| Электропроводящая полимерная композиция | 1977 |
|
SU665665A1 |
| FR 2882479 А, 25.08.2006. | |||

