Предпосылки создания изобретения
Область техники, к которой относится изобретение
В общем варианты осуществления настоящего изобретения относятся к обработке сейсмических данных, а точнее - к способу вычисления градиента сигналов давления.
Описание уровня техники
Сейсмическая разведка представляет собой способ определения структуры подземных пластов в геологической среде. При сейсмической разведке обычно используют источники сейсмической энергии, которые формируют сейсмические волны, и сейсмические приемники, которые обнаруживают сейсмические волны. Сейсмические волны распространяются в пласты в геологической среде, где часть волн отражается от границ раздела между подземными пластами. Амплитуда и полярность отраженных волн определяются различиями акустического импеданса слоев породы, содержащих подземные пласты. Акустический импеданс слоя породы представляет собой произведение скорости распространения акустической волны в слое и плотности слоя. Сейсмические приемники обнаруживают отраженные сейсмические волны и преобразуют отраженные волны в репрезентативные электрические сигналы. Обычно сигналы передают посредством электрических, оптических, радиотехнических или других средств в устройства, которые записывают сигналы. Путем анализа записанных сигналов (или трасс) можно определить форму, местоположение и состав подземных пластов.
Морская сейсмическая разведка представляет собой способ определения структуры подземных пластов, лежащих ниже толщи воды. При морской сейсмической разведке обычно используют источники сейсмической энергии и сейсмические приемники, находящиеся в воде, и они либо буксируются позади судна или размещаются с судна на дне моря. Источник энергии обычно представляет собой взрывное устройство или систему со сжатым воздухом, которая вырабатывает сейсмическую энергию, которая затем в виде сейсмических волн распространяется через толщу воды и входит в подземные пласты ниже дна моря. Когда сейсмические волны достигают границ раздела между подземными пластами, часть сейсмических волн отражается обратно через грунт и воду к сейсмическим приемникам для обнаружения, передачи и записи. Сейсмические приемники, обычно используемые при морской сейсмической разведке, представляют собой датчики давления, например гидрофоны. Однако в дополнение к ним могут быть использованы датчики перемещения, например акселерометры. Для охвата района разведки как источники, так и приемники могут оперативно перемещаться на новые места.
При морской сейсмической разведке часто используют косы из сейсмических приемников. Косы обычно содержат гидрофоны для записи флуктуаций давления, вызванных сейсмическими волнами, распространяющимися в воде. В последнее время выявили, что значение сейсмических данных существенно повысится, если можно будет записать вектор движения частиц сейсмических волн, распространяющихся в воде. Некоторые сейсмические косы снабжают геофонами или акселерометрами для записи скорости или ускорения частиц; однако доказано, что такие конфигурации являются сложными вследствие шума и механических вибраций кос.
Однако в соответствии с уравнением движения Ньютона ускорение частиц эквивалентно градиенту давления. По существу градиент давления может быть записан или оценен в противоположность скорости или ускорению частиц. Градиент давления может быть записан или оценен путем использования совокупности близко расположенных кос, например конфигурации с размещением на верхнем и нижнем горизонтах. К сожалению, такие способы часто являются сложными в использовании и дорогостоящими. Поэтому недавно было предложено использовать множество гидрофонов, разнесенных на небольшое расстояние в пределах одной косы. Одна из проблем, встречающихся при использовании таких кос, заключается в необходимости поддержания минимальным диаметра кос для исключения отрицательных последствий, например гидравлического сопротивления и т.п. Поэтому этим необходимым условием ограничивается величина расстояния, которое может быть оставлено между приемниками в косах в конфигурации измерения градиента давления. Обнаружено, что чем меньше расстояние между приемниками, тем меньшее количество низких частот можно извлечь.
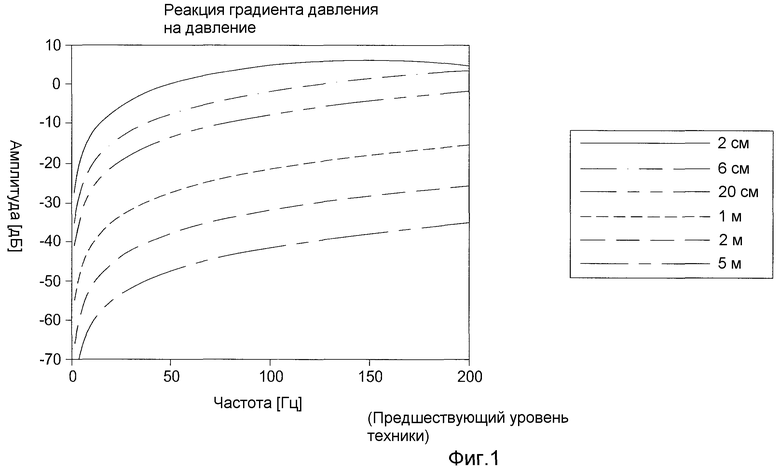
Одна проблема, возникающая от размещения приемников близко друг к другу, заключается в повышении шума вслед за сигналом при оценивании градиента давления. По мере уменьшения расстояния между приемниками сила сигнала в результате различия между сигналами давления приемников также уменьшается (см. фигуру 1). Это уменьшение силы сигнала часто приводит к недостоверным результатам измерений градиента давления.
Поэтому в данной области техники существует необходимость в усовершенствованном способе вычисления градиента сигнала давления, в котором исключены рассмотренные выше проблемы.
Сущность изобретения
В общем различные варианты осуществления настоящего изобретения касаются способа вычисления градиента давления. Способ включает в себя записывание множества сигналов давления на по меньшей мере одном из первого приемника и второго приемника. Первый приемник и второй приемник располагают в кластере. Кроме того, способ включает в себя записывание множества сигналов давления на втором приемнике; вычисление калибровочного фильтра для устранения различия в искажениях между сигналами давления, записанными на первом приемнике, и сигналами давления, записанными на втором приемнике; и вычисление градиента сигналов давления между сигналами давления, записанными на первом приемнике, и сигналами давления, записанными на втором приемнике, путем использования калибровочного фильтра.
В одном варианте осуществления изобретения первый и второй приемники располагают по вертикали один над другим.
В другом варианте осуществления изобретения калибровочный фильтр вычисляют в соответствии с  ,
,
где: G(ω) обозначает калибровочный фильтр; φ(k
x,ω) обозначает функцию стоимости; ρ обозначает плотность воды; ω обозначает угловую частоту;  обозначает сигналы давления, записанные на первом приемнике;
обозначает сигналы давления, записанные на первом приемнике;  обозначает сигналы давления, записанные на втором приемнике; Δz обозначает вертикальное расстояние, разделяющее первый приемник от второго приемника; и k
z обозначает абсолютное значение вертикального волнового числа.
обозначает сигналы давления, записанные на втором приемнике; Δz обозначает вертикальное расстояние, разделяющее первый приемник от второго приемника; и k
z обозначает абсолютное значение вертикального волнового числа.
Функцию φ(k x,ω) стоимости получают так, что пространственно-временное окно данных, к которому она применяется, содержит только восходящие волны. Как таковой калибровочный фильтр может быть определен путем минимизации функции φ(k x,ω) стоимости в пространственно-временном окне данных, содержащем только восходящие волны.
В еще одном варианте осуществления изобретения градиент сигналов давления вычисляют в соответствии с  ,
,
где:  обозначает компоненту z градиента сигналов давления;
обозначает компоненту z градиента сигналов давления;  обозначает сигналы давления, записанные на первом приемнике; G(ω) обозначает калибровочный фильтр;
обозначает сигналы давления, записанные на первом приемнике; G(ω) обозначает калибровочный фильтр;  обозначает сигналы давления, записанные на втором приемнике; и Δz обозначает вертикальное расстояние между первым приемником и вторым приемником.
обозначает сигналы давления, записанные на втором приемнике; и Δz обозначает вертикальное расстояние между первым приемником и вторым приемником.
Краткое описание чертежей
Чтобы можно было детально понять последовательность перечисленных выше признаков настоящего изобретения, более конкретное описание изобретения, кратко изложенное выше, сделано относительно вариантов осуществления изобретения, некоторые из которых иллюстрируются прилагаемыми чертежами. Однако следует отметить, что прилагаемые чертежи иллюстрируют только типичные варианты осуществления этого изобретения и поэтому не должны считаться ограничивающими его объем, при этом для изобретения могут предполагаться другие, равным образом эффективные варианты осуществления изобретения.
На чертежах:
Фиг.1 - график, иллюстрирующий уменьшение уровня сигнала в результате различия между сигналами давления приемников, когда расстояние между приемниками уменьшается;
Фиг.2 - вид сейсморазведочного судна, буксирующего сейсмический источник и сейсмическую косу, которые могут быть использованы в сочетании с одним или несколькими вариантами осуществления изобретения;
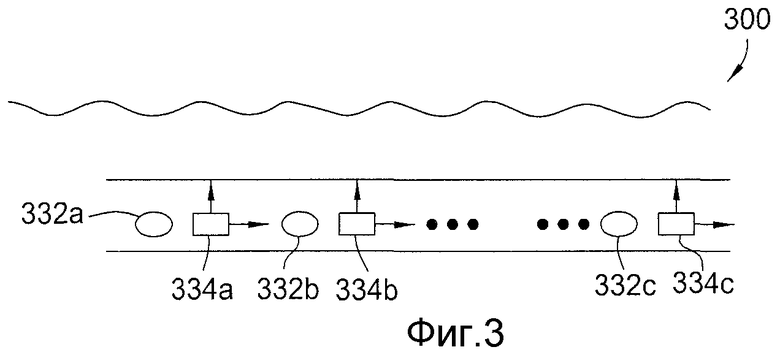
Фиг.3 - вид конфигурации косы, которая может быть использована в сочетании с одним или несколькими вариантами осуществления изобретения;
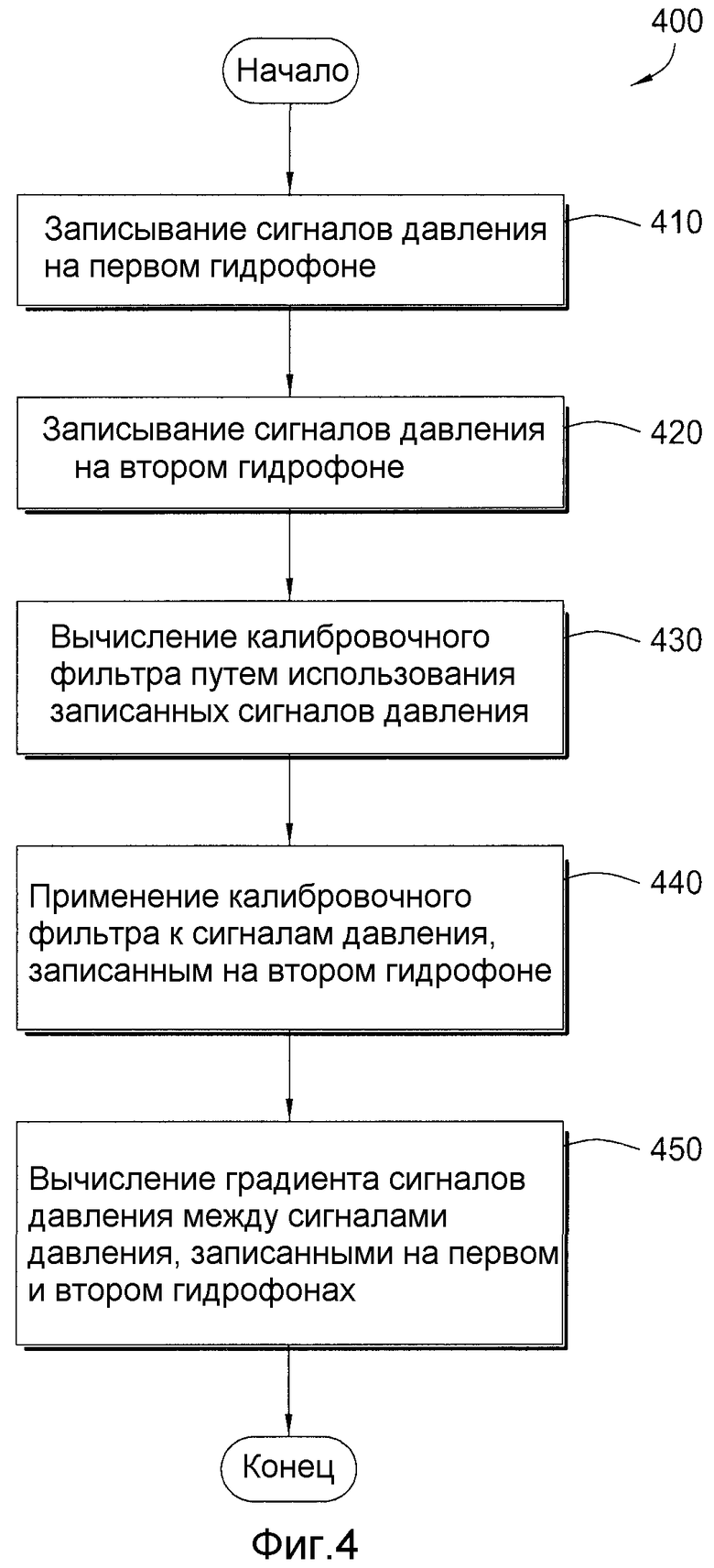
Фиг.4 - блок-схема последовательности операций способа вычисления оценки градиента сигналов давления согласно одному или нескольким вариантам осуществления изобретения; и
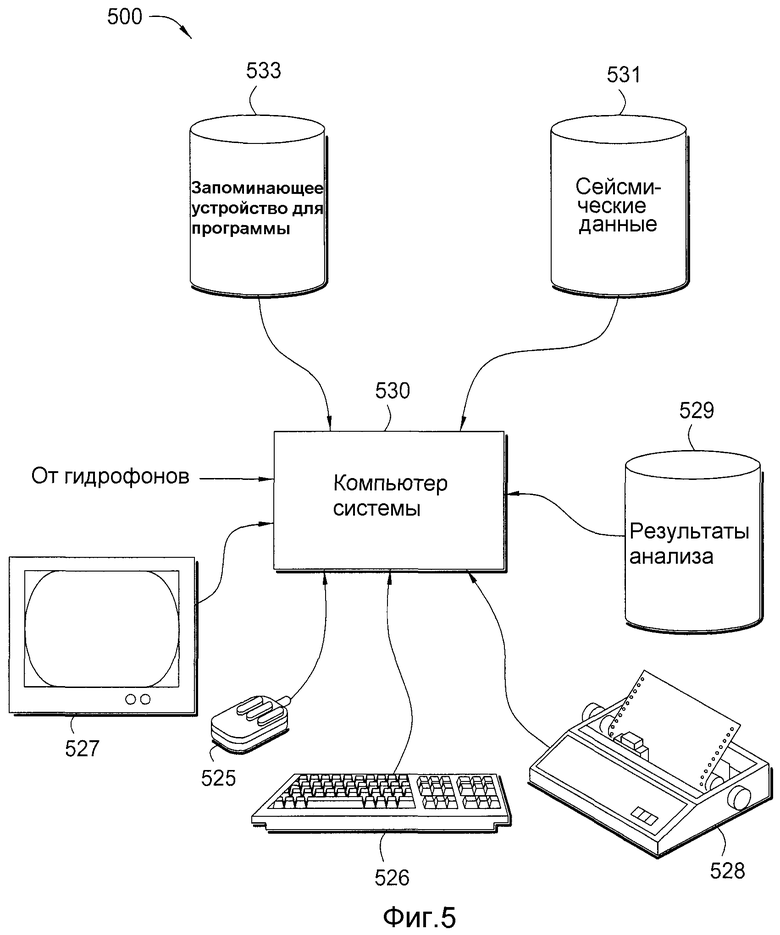
Фиг.5 - структурная схема компьютерной сети, в которой могут быть реализованы варианты осуществления изобретения.
Подробное описание
На фигуре 2 показано сейсморазведочное судно 200, буксирующее сейсмический источник 210 и сейсмическую косу 218, которые могут быть использованы в сочетании с одним или несколькими вариантами осуществления изобретения. Сейсмическая коса 218 может быть размещена приблизительно на 60 м ниже поверхности 212 моря. Однако специалисты в данной области техники должны осознавать, что сейсмическая коса 218 может быть размещена на намного меньшей глубине, например от 3 до 4 м ниже поверхности 212 моря, или на глубинах, больших, чем 60 м ниже поверхности 212 моря. Стрелками 222a-d при пунктирных линиях показаны траектории сейсмической волны от сейсмического источника 210. Стрелкой 222а показана исходная нисходящая сейсмическая волна. Стрелкой 222b показана часть сейсмической волны, которая прошла через морское дно 214. Стрелкой 222с показано восходящее отражение сейсмической волны. Стрелкой 222d показана нисходящая волна-спутник, отраженная от поверхности 212 моря.
На фигуре 3 показана конфигурация 300 косы, которая может быть использована в сочетании с одним или несколькими вариантами осуществления изобретения. Конфигурация 300 косы включает в себя косу 330, которая содержит большое количество гидрофонов 332a, 332b, 332c и большое количество устройств 334a, 334b и 334с измерения градиента сигналов давления. Гидрофоны 332a, 332b, 332c разнесены на расстояния, меньшие, чем приблизительно 12 м. Устройства 334a, 334b и 334с измерения градиента сигналов давления также разнесены на расстояния, меньшие, чем приблизительно 12 м. Каждое устройство 334 измерения градиента сигналов давления может быть кластером гидрофонов, который включает в себя два гидрофона, которые расположены по вертикали один над другим. В таком варианте осуществления изобретения два гидрофона могут быть расположены точно на одной линии один над другим. В другом варианте осуществления изобретения каждое устройство 334 измерения градиента сигналов давления может быть кластером гидрофонов, имеющим три гидрофона, расположенных по углам в треугольной конфигурации. В еще одном варианте осуществления изобретения каждое устройство 334 измерения градиента сигналов давления может быть кластером гидрофонов, имеющим четыре гидрофона, расположенных по углам в тетраэдральной конфигурации. Коса 330 может также включать в себя инклинометры (непоказанные) для измерения ориентации гидрофонов, расположенных в треугольных или тетраэдральных конфигурациях. Одно преимущество от использования кластеров гидрофонов, расположенных в треугольных или тетраэдральных конфигурациях, заключается в возможности получать вертикальные градиенты сигналов давления, а также горизонтальные градиенты сигналов давления.
На фигуре 4 показана блок-схема последовательности операций способа 400 вычисления оценки градиента сигналов давления согласно одному или нескольким вариантам осуществления изобретения. На этапе 410 записывают сигналы давления на первом гидрофоне в кластере гидрофонов, имеющем два гидрофона, расположенных по вертикали один над другим. На этапе 420 записывают сигналы давления на втором гидрофоне в том же самом кластере. Следовательно, сигналы давления на первом гидрофоне записывают отдельно от сигналов давления, записываемых на втором гидрофоне. Записи на этапах 410 и 420 могут быть выполнены до, во время или после разведки. Одно преимущество записи сигналов давления до или во время разведки заключается в возможности визуализации или в выполнении контроля качества измерений градиента сигналов давления во время разведки. Первый гидрофон и второй гидрофон разнесены по вертикали на расстояние Δz, которое может быть в пределах от около 1,5 см до около 15 см.
На этапе 430, используя записанные сигналы давления, вычисляют калибровочный фильтр. В одном варианте осуществления изобретения калибровочный фильтр может быть вычислен путем использования следующего уравнения:
, (уравнение 1)
(уравнение 1)
где: G(ω) обозначает калибровочный фильтр; φ(k
x,ω) обозначает функцию стоимости; ρ обозначает плотность воды; ω обозначает угловую частоту; обозначает сигналы давления, записанные на первом гидрофоне; обозначает сигналы давления, записанные на втором гидрофоне; Δz обозначает вертикальное расстояние, разделяющее первый гидрофон от второго гидрофона; и k
z обозначает абсолютное значение вертикального волнового числа, которое может быть выражено через частоту и горизонтальные волновые числа путем использования дисперсионного соотношения для воды в виде ( , где: c - скорость акустической волны в воде).
, где: c - скорость акустической волны в воде).
Функцию стоимости, φ(k x,ω), получают так, чтобы пространственно-временное окно, к которому она применяется, содержала только восходящие волны. Поэтому как таковой калибровочный фильтр G(ω) может быть определен путем минимизации функции стоимости, φ(k x,ω), в пространственно-временном окне данных, которое содержит только восходящие волны. Другими словами, калибровочный фильтр G(ω) может быть определен путем минимизации функции стоимости, φ(k x,ω), как функции угловой частоты. Следовательно, калибровочный фильтр является частотно-зависимым. Кроме того, в этом варианте осуществления изобретения предполагается распространение только вдоль линии наблюдения, и зависимость от k y игнорируется. Хотя вариант осуществления изобретения описывается относительно вычисления калибровочного фильтра путем использования уравнения (1), в других вариантах осуществления изобретения предполагаются другие способы и уравнения для вычисления калибровочного фильтра.
Уравнение (1) может быть получено на основании восходящего и нисходящего участков вертикальной компоненты V z скорости частиц. Восходящий участок вертикальной компоненты V z скорости частиц описывается следующим образом:
 ,
, (уравнение 2)
(уравнение 2)
где: V
z обозначает вертикальную компоненту скорости частиц;  обозначает восходящий участок вертикальной компоненты скорости частиц; ρ обозначает плотность воды; ω обозначает угловую частоту; Р обозначает давление; и k
z обозначает абсолютное значение вертикального волнового числа.
обозначает восходящий участок вертикальной компоненты скорости частиц; ρ обозначает плотность воды; ω обозначает угловую частоту; Р обозначает давление; и k
z обозначает абсолютное значение вертикального волнового числа.
Нисходящий участок вертикальной компоненты скорости V z частиц описывается следующим образом:
 ,(уравнение 3)
,(уравнение 3)
где: V
z обозначает вертикальную компоненту скорости частиц;  обозначает нисходящий участок вертикальной компоненты скорости частиц; ρ обозначает плотность воды; ω обозначает угловую частоту; Р обозначает давление; и , где: k
z обозначает абсолютное значение вертикального волнового числа.
обозначает нисходящий участок вертикальной компоненты скорости частиц; ρ обозначает плотность воды; ω обозначает угловую частоту; Р обозначает давление; и , где: k
z обозначает абсолютное значение вертикального волнового числа.
Вертикальная компонента V z скорости частиц может быть представлена в виде:
 ,
, (уравнение 4)
(уравнение 4)
где: ρ обозначает плотность воды; ω обозначает угловую частоту; Р обозначает давление; и  обозначает вертикальную компоненту градиента сигналов давления.
обозначает вертикальную компоненту градиента сигналов давления.
Поле Р 1 давления на первом гидрофоне может быть выражено как:
 ,
, (уравнение 5)
(уравнение 5)
где: обозначает сигналы давления, записанные на первом гидрофоне.
Точно так же давление Р 2 на втором гидрофоне может быть выражено как:
 ,(уравнение 6)
,(уравнение 6)
где: обозначает сигналы давления, записанные на втором гидрофоне.
Как F 1(ω), так и F 2(ω) характеризуют фильтры, которые являются функциями частоты со значением, по существу равным значению из значительного участка частотного диапазона, представляющего интерес.
Для волнового фронта, разложенного по плоским волнам, уравнение (3) можно переписать, используя уравнения с (4) по (6), и это дает:

(уравнение 7)
Поскольку Р 1≈Р 2 и поскольку Δz очень мало, например находится в пределах от около 1,5 см до около 15 см, уравнение (7) может быть переписано как:
 .
.
(уравнение 8)
Из уравнения (8) можно видеть, что задача калибровки для двух близко расположенных гидрофонов может быть решена прежде всего путем определения частотно-зависимого фильтра G(ω) в пространственно-временном окне данных, содержащем только восходящие волны.
Снова обратимся к фигуре 4, где после того, как калибровочный фильтр вычислен, калибровочный фильтр применяют (этап 440) к сигналам давления, записанным на втором гидрофоне. Если операцию осуществляют во временной области, калибровочный фильтр может быть применен с помощью свертывания. В качестве альтернативы, если операцию осуществляют в частотной области, калибровочный фильтр может быть применен с помощью умножения. Таким способом устраняют различие в искажениях записанных сигналов давления, так что результирующие сигналы давления как от первого, так и второго гидрофонов будут иметь идентичные искажения. То есть сигналы давления, записанные как на первом, так и на втором гидрофонах, будут иметь по существу идентичные характеристики. В одном варианте осуществления изобретения калибровочный фильтр может быть применен к сигналам давления, записанным на втором гидрофоне во время разведки, до вычисления градиента сигналов давления.
На этапе 450 вычисляют градиент сигналов давления между сигналами давления, записанными на первом и втором гидрофонах. В одном варианте осуществления изобретения компоненту z градиента сигналов давления вычисляют в соответствии с:
, (уравнение 9)
(уравнение 9)
где: обозначает компоненту z градиента сигналов давления; обозначает сигналы давления, записанные на первом гидрофоне; обозначает сигналы давления, записанные на втором гидрофоне; и Δz обозначает вертикальное расстояние между первым гидрофоном и вторым гидрофоном.
Компоненты x и y градиента сигналов давления также могут быть вычислены путем использования различных, рассмотренных выше способов, используемых для вычисления компоненты z градиента сигналов давления. Кроме того, для калибровки градиента сигналов давления поперек профиля коса может быть повернута в воде, и процедура калибровки может быть повторена так, чтобы все компоненты градиента сигналов давления могли быть точно прокалиброваны. После осуществления надлежащим образом калибровки в вертикальном направлении конфигурация градиента сигналов давления пригодна для записи с тем же успехом вертикального градиента, а также градиента сигналов давления поперек линии профиля.
В одном варианте осуществления изобретения после того, как градиент сигналов давления будет вычислен, градиент сигналов давления может быть использован при традиционной обработке сейсмических данных, включая подавление волн-спутников, удаление многократных волн и построение изображения. В другом варианте осуществления изобретения способ 400 может быть повторен для каждой конфигурации градиента давления в косе. В еще одном варианте осуществления изобретения способ 400 может быть повторен для каждой конфигурации градиента давления в области общего пункта приема или в области общего пункта взрыва путем использования фильтров компактного пространства, которые воздействуют на записанные сигналы давления, описанных в обычным образом переуступленной Международной заявке WO 2004/029662, которая включена в настоящую заявку путем ссылки. Хотя способ вычисления оценки градиента сигналов давления описан применительно к кластеру гидрофонов, имеющему два гидрофона, в других вариантах осуществления изобретения предусматриваются способы вычисления оценок градиента сигналов давления в случае кластера гидрофонов, имеющего более чем два гидрофона, например три или четыре гидрофона. Кроме того, хотя варианты осуществления изобретения описаны применительно к конфигурации с одной косой, такой как коса 330, другие варианты осуществления изобретения также могут быть применены к конфигурациям с множественными косами, таким как конфигурации с косами на верхнем и нижнем горизонтах. Кроме того, хотя в настоящей заявке варианты осуществления изобретения описаны применительно к гидрофонам, в других вариантах осуществления изобретения предполагаются приемники других типов, общеизвестные для специалистов в данной области техники. Кроме того, различные варианты осуществления изобретения, рассмотренные в настоящей заявке, могут быть применены к сейсмическим данным, регистрируемым в придонных сейсмических условиях, скважинных сейсмических условиях или в сейсмических условиях верхнего и нижнего горизонтов.
На фигуре 5 показана компьютерная сеть 500, в которой могут быть реализованы варианты осуществления изобретения. Компьютерная сеть 500 включает в себя компьютер 530 системы, который может быть реализован как любой обычный персональный компьютер или рабочая станция, например рабочая станция на основе операционной системы UNIX. Компьютер 530 системы находится в связи с дисковыми запоминающими устройствами 529, 531 и 533, которые могут быть внешними запоминающими устройствами в виде жестких дисков. Предполагается, что дисковые запоминающие устройства 529, 531 и 533 представляют собой обычные накопители на жестких магнитных дисках, и как таковые должны быть реализованы с помощью локальной вычислительной сети или удаленного доступа. Конечно, хотя дисковые запоминающие устройства 529, 531 и 533 показаны как отдельные устройства, единственное дисковое запоминающее устройство может быть использовано для хранения любой и всех команд программы, данных измерений и, при желании, результатов.
В одном варианте осуществления изобретения сейсмические данные, например сигналы давления, полученные от гидрофонов, сохраняют в дисковом запоминающем устройстве 531. Компьютер 530 системы может извлекать соответствующие данные из дискового запоминающего устройства 531, чтобы исполнять команды программы, которые соответствуют способам вычисления градиента сигналов давления, описанным в настоящей заявке. Команды программы могут быть записаны на компьютерных языках программирования, таких как Си-плюс-плюс, Ява и т.п. Команды программы могут храниться в считываемом компьютером запоминающем устройстве, таком как дисковое запоминающее устройство 533 для хранения программы. Конечно, запоминающие среды, хранящие команды программы, могут быть любого известного типа, используемыми для хранения компьютерных программ, включая накопители на жестких магнитных дисках, дискеты, компакт-диски, доступные только для чтения, и другие оптические носители, магнитную ленту и т.п.
Согласно предпочтительному варианту осуществления изобретения компьютер 530 системы вырабатывает выходные данные главным образом на графическом дисплее 527 или в качестве альтернативы с помощью принтера 528. В компьютере 530 системы результаты способов, описанных выше, могут сохраняться на дисковом запоминающем устройстве 529 для более позднего использования и дополнительного анализа. Для обеспечения возможности интерактивной работы компьютер 530 системы может быть снабжен клавиатурой 526 и координатным устройством 525 (например, мышью, трекболом и т.п.).
Компьютер 530 системы может быть расположен в центре обработки данных, удаленном от района разведки. Компьютер 530 системы находится в связи с гидрофонами (либо непосредственно, либо через регистрирующее устройство, непоказанное) для приема сигналов, отображающих отраженные сейсмические волны. Эти сигналы после обычного форматирования и другой первичной обработки сохраняются компьютером 530 системы в виде цифровых данных в дисковом запоминающем устройстве 531 для последующего извлечения и обработки способом, описанным выше. Хотя на фигуре 5 дисковое запоминающее устройство 531 показано как непосредственно соединенное с компьютером 530 системы, также предполагается, что дисковое запоминающее устройство 531 может быть доступно через локальную вычислительную сеть или с помощью удаленного доступа. Кроме того, как должно быть совершенно понятно специалисту в данной области техники, обращающемуся к этому описанию, хотя дисковые запоминающие устройства 529, 531 показаны как отдельные устройства, предназначенные для хранения сейсмических данных и анализа результатов, дисковые запоминающие устройства 529, 531 могут быть реализованы в виде единственного дискового накопителя (вместе или отдельно от дискового запоминающего устройства 533 для хранения программы) или в виде любого другого известного средства, понятного для специалиста в данной области техники.
Хотя вышеизложенное касается вариантов осуществления настоящего изобретения, иные и дополнительные варианты осуществления изобретения могут быть разработаны без отступления от основного объема его, и объем его определяется формулой изобретения, которая следует ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБРАБОТКА СЕЙСМИЧЕСКИХ ДАННЫХ | 2003 |
|
RU2344444C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЁМНИКА ПРИ СЕЙСМОРАЗВЕДКЕ | 2002 |
|
RU2293362C2 |
| ОПРЕДЕЛЕНИЕ ВЫСОТЫ ПОВЕРХНОСТИ СТОЛБА ЖИДКОСТИ | 2002 |
|
RU2321026C2 |
| ОСЛАБЛЕНИЕ ВОЛН-СПУТНИКОВ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2005 |
|
RU2418308C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2003 |
|
RU2335787C2 |
| ОПРЕДЕЛЕНИЕ СОГЛАСОВАНИЯ ГЕОФОНА | 2004 |
|
RU2324955C2 |
| ОБОБЩЕННОЕ ТРЕХМЕРНОЕ ПРОГНОЗИРОВАНИЕ КРАТНЫХ ВОЛН ОТ ПОВЕРХНОСТИ | 2004 |
|
RU2339056C2 |
| СВИПИРОВАНИЕ ДЛЯ МОРСКИХ ВИБРАТОРОВ С УМЕНЬШЕННОЙ СТЕПЕНЬЮ РАЗМЫТИЯ И/ИЛИ С ПОВЫШЕННЫМ МАКСИМАЛЬНО ДОПУСТИМЫМ ИСКАЖЕНИЕМ СИГНАЛА | 2012 |
|
RU2554682C2 |
| БЫСТРОЕ ТРЕХМЕРНОЕ ПРОГНОЗИРОВАНИЕ КРАТНЫХ ВОЛН ОТ ПОВЕРХНОСТИ ЗЕМЛИ | 2004 |
|
RU2333515C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2013 |
|
RU2616650C2 |
Варианты осуществления настоящего изобретения относятся к обработке сейсмических данных, а точнее - к способу вычисления градиента сигналов давления. Заявленные способы вычисления градиента сигналов давления заключаются в том, что размещают косу с, по меньшей мере, одним устройством измерения градиента сигналов давления, причем каждое устройство измерения градиентов сигналов давления имеет первый приемник, второй приемник и третий приемник, расположенные в кластере в треугольной конфигурации, записывают множество сигналов давления на первом приемнике, втором приемнике и третьем приемнике; и вычисляют градиент сигналов давления между сигналами давления, записанными на первом приемнике, сигналами давления, записанными на втором приемнике, и сигналами давления, записанными на третьем приемнике. Технический результат заключается в усовершенствовании способа вычисления градиента сигнала давления за счет понижения шума вслед за сигналом при оценивании градиента давления, а также за счет увлечения силы сигнала по мере уменьшения расстояния между приемниками. 2 н. и 27 з.п.ф-лы, 5 ил.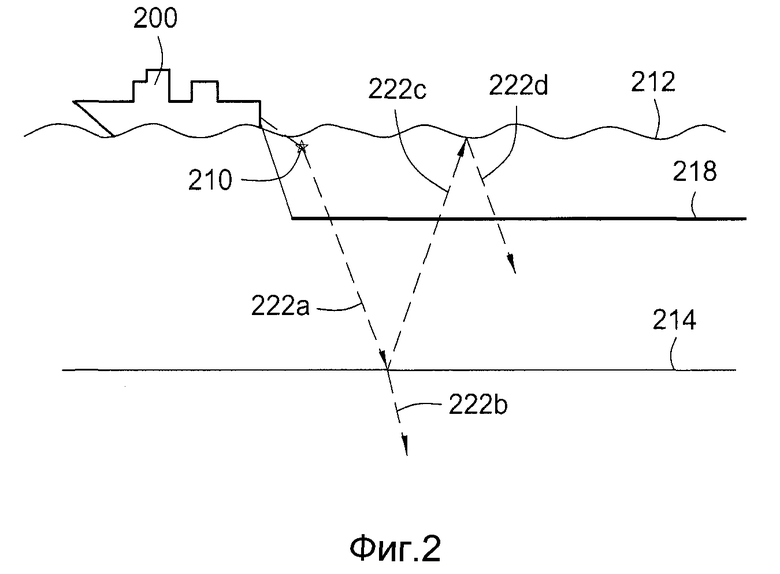
1. Способ вычисления градиента сигналов давления, заключающийся в том, что
размещают косу с, по меньшей мере, одним устройством измерения градиента сигналов давления, причем каждое устройство измерения градиентов сигналов давления имеет первый приемник и второй приемник, расположенные в кластере, при этом первый приемник расположен по вертикали над вторым приемником и первый приемник отнесен от второго приемника на расстояние от около 1,5 до около 15 см,
записывают множество сигналов давления на первом приемнике и втором приемнике и
вычисляют градиент сигналов давления между сигналами давления, записанными на первом приемнике, и сигналами давления, записанными на втором приемнике.
2. Способ по п.1, в котором при вычислении градиента сигналов давления устраняют различия в искажениях между сигналами давления, записанными на первом приемнике, и сигналами давления, записанными на втором приемнике.
3. Способ по п.1, в котором при вычислении градиента сигналов давления вычисляют калибровочный фильтр, используя записанные сигналы давления.
4. Способ по п.3, в котором калибровочный фильтр является частотно-зависимым.
5. Способ по п.3, в котором при вычислении калибровочного фильтра минимизируют весовую функцию φ(kx,ω) как функцию угловой частоты, при этом 
где G(ω) обозначает калибровочный фильтр; φ(kx,ω) обозначает весовую функцию; ρ обозначает плотность воды; ω обозначает угловую частоту; P1 обозначает сигналы давления, записанные на первом приемнике; Р2 обозначает сигналы давления, записанные на втором приемнике; Δz обозначает вертикальное расстояние, разделяющее первый приемник от второго приемника; и kz обозначает абсолютное значение вертикального волнового числа.
6. Способ по п.5, в котором весовую функцию φ(kx,ω) минимизируют в пространственно-временном окне данных, которое содержит только восходящие волны.
7. Способ по п.3, в котором при вычислении градиента сигналов давления дополнительно применяют калибровочный фильтр к сигналам давления, записанным на втором приемнике.
8. Способ по п.7, в котором калибровочный фильтр применяют к сигналам давления, записанным на втором приемнике, с помощью свертывания.
9. Способ по п.7, в котором калибровочный фильтр применяют к сигналам давления, записанным на втором приемнике, с помощью умножения.
10. Способ по п.7, в котором при вычислении градиента сигналов давления дополнительно вычитают калиброванные сигналы давления, записанные на втором приемнике, из сигналов давления, записанных на первом приемнике.
11. Способ по п.7, в котором при вычислении градиента сигналов давления дополнительно
вычитают калиброванные сигналы давления, записанные на втором приемнике, из сигналов давления, записанных на первом приемнике; и
делят результат на расстояние между первым приемником и вторым приемником.
12. Способ по п.1, в котором градиент сигналов давления вычисляют в соответствии с  обозначает компоненту z градиента сигналов давления; P1 обозначает сигналы давления, записанные на первом приемнике; G(ω) обозначает калибровочный фильтр; P2 обозначает сигналы давления, записанные на втором приемнике; и Δz обозначает вертикальное расстояние между первым приемником и вторым приемником.
обозначает компоненту z градиента сигналов давления; P1 обозначает сигналы давления, записанные на первом приемнике; G(ω) обозначает калибровочный фильтр; P2 обозначает сигналы давления, записанные на втором приемнике; и Δz обозначает вертикальное расстояние между первым приемником и вторым приемником.
13. Способ по п.1, в котором сигналы давления на первом приемнике записывают отдельно от сигналов давления, записываемых на втором приемнике.
14. Способ по п.1, в котором сигналы давления записывают до разведки.
15. Способ по п.1, в котором сигналы давления записывают во время разведки.
16. Способ по п.1, в котором сигналы давления записывают после разведки.
17. Способ по п.1, в котором первый и второй приемники представляют собой гидрофоны.
18. Способ по п.1, дополнительно включающий в себя применение градиента сигналов давления к сейсмическим данным, зарегистрированным в морских сейсмических условиях при буксировке.
19. Способ по п.1, дополнительно включающий в себя применение градиента сигналов давления к сейсмическим данным, зарегистрированным в придонных сейсмических условиях.
20. Способ по п.1, дополнительно включающий в себя применение градиента сигналов давления к сейсмическим данным, зарегистрированным в скважинных сейсмических условиях.
21. Способ по п.1, дополнительно включающий в себя применение градиента сигналов давления к сейсмическим данным, зарегистрированным в сейсмических условиях с несколькими косами на верхнем и нижнем горизонтах.
22. Способ по п.1, в котором устройство измерения градиента сигналов давления дополнительно содержит третий приемник, при этом способ дополнительно содержит этапы, на которых:
записывают множество сигналов на третьем приемнике и
вычисляют градиент сигналов давления между сигналами давления, записанными на первом приемнике, сигналами давления, записанными на втором приемнике, и сигналами давления, записанными на третьем приемнике.
23. Способ по п.1, в котором устройство измерения градиента сигналов давления дополнительно содержит третий приемник и четвертый приемник, при этом способ дополнительно содержит этапы, на которых:
записывают множество сигналов давления на третьем приемнике;
записывают множество сигналов давления на четвертом приемнике и
вычисляют градиент сигналов давления между сигналами давления, записанными на первом приемнике, сигналами давления, записанными на втором приемнике, сигналами давления, записанными на третьем приемнике, и сигналами давления, записанными на четвертом приемнике.
24. Способ по п.22, дополнительно содержащий этап, на котором получают вертикальные градиенты сигналов давления и горизонтальные градиенты сигналов давления из первого приемника, второго приемника и третьего приемника, расположенных в кластере в треугольной конфигурации.
25. Способ вычисления градиента сигналов давления, заключающийся в том, что
размещают косу с, по меньшей мере, одним устройством измерения градиента сигналов давления, причем каждое устройство измерения градиентов сигналов давления имеет первый приемник, второй приемник и третий приемник, расположенные в кластере в треугольной конфигурации;
записывают множество сигналов давления на первом приемнике, втором приемнике и третьем приемнике и
вычисляют градиент сигналов давления между сигналами давления, записанными на первом приемнике, сигналами давления, записанными на втором приемнике, и сигналами давления, записанными на третьем приемнике.
26. Способ по п.25, в котором устройство измерения градиента сигналов давления имеет четвертый приемник, расположенный в тетраэдральной конфигурации с первым приемником, вторым приемником и третьим приемником.
27. Способ по п.26, дополнительно содержащий этапы, на которых:
записывают множество сигналов давления на первом приемнике, втором приемнике, третьем приемнике и четвертом приемнике и
вычисляют градиенты сигналов давления между сигналами давления, записанными на первом приемнике, втором приемнике, третьем приемнике и четвертом приемнике.
28. Способ по п.26, дополнительно содержащий этап, на котором:
получают вертикальные градиенты сигналов давления и горизонтальные градиенты сигналов давления из вычисленных градиентов сигналов давления между сигналами давления, записанными на первом приемнике, втором приемнике, третьем приемнике и четвертом приемнике.
29. Способ по п.25, дополнительно содержащий этап, на котором:
получают вертикальные градиенты сигналов давления и горизонтальные градиенты сигналов давления из первого приемника, второго приемника и третьего приемника.
| US 4692907 A, 08.09.1987 | |||
| US 6041127 A, 21.03.2000 | |||
| US 3548631 A, 22.12.1970. |

