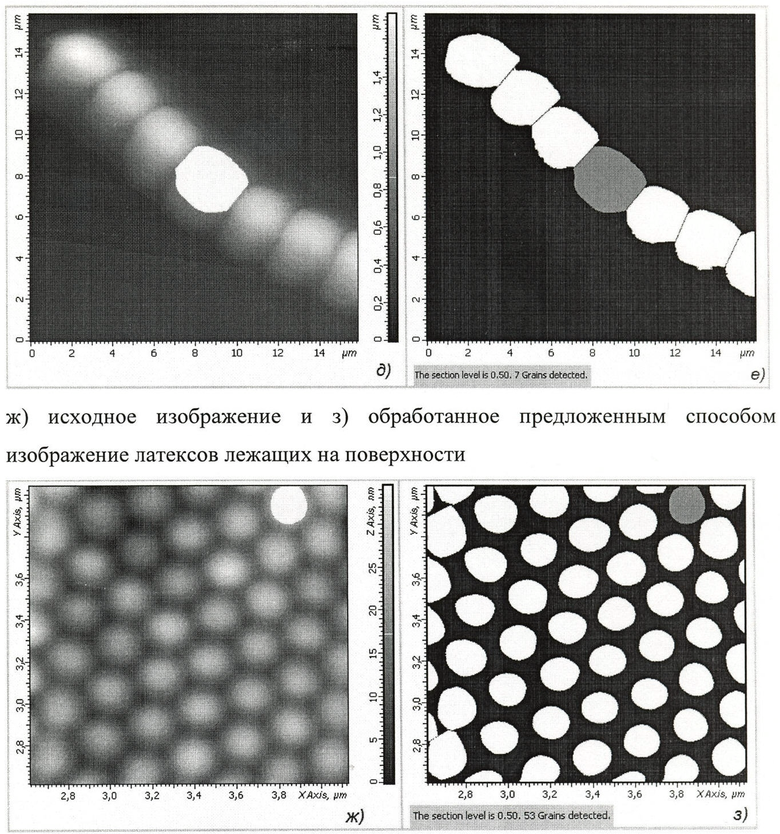
Изобретение относится к цифровой обработке изображений, полученных методами сканирующей зондовой микроскопии (СЗМ- изображений), а точнее к сегментации СЗМ - изображений поверхности, которая является суперпозицией базовой поверхности и расположенных на ней локальных объектов с выпуклой верхней частью, именуемых далее частицами.
Изобретение может быть использовано для нахождения геометрических характеристик (характерных размеров, площади сечений, объема и т.д.) частиц, расположенных на поверхности, таких как нанокластеры, микрокристаллиты, частицы коллоидной природы, молекулярные образования, биологические объекты типа вирусов, микробов, клеточных органелл.
Известны способы сегментации изображений, основанные на сегментации преобразованием водораздела [1, 2]. Одной из основных трудностей при использовании водоразделов является избыточная сегментация, которая проявляется в выделении огромного числа областей, что вызвано шумом и другими локальными неровностями. В лучшем случае сегментация на основе водораздела позволяет найти для каждой частицы некоторую горизонтальную область - «территорию», занимаемую частицей, на основе которой затем можно определить латеральные параметры частицы. Однако найденная таким образом «территория» по-разному определяется для разных частиц и может отличаться от «характерной горизонтальной области», т.е. горизонтальной области, определяемой одинаковым образом для всех частиц (например, проекции частицы на горизонтальную плоскость или сечения частицы на определенном уровне относительной высоты). Поэтому рассчитанные на основе найденных «территорий» латеральные параметры частиц могут недостаточно точно соответствовать характерным латеральным параметрам частиц, т.е. параметрам определенным одинаковым образом для всех частиц.
Известен способ сегментации изображений путем пороговой обработки [3]. В этом способе считается, что изображение описывается функцией двух переменных, f(x,y), отсчитываемой от некоторой базовой плоскости (XY), и в каждой точке (x,y) значение этой функции сравнивается с некоторым заданным пороговым значением. И в зависимости от результата сравнения точки, в которых значение функции больше порогового, считаются принадлежащими к множеству точек локальных объектов (частиц), а меньше порогового не принадлежащими. Сегментация на основе пороговой обработки используется для анализа частиц в программных пакетах по обработке СЗМ изображений, например в SPIP (The Scanning Probe Image Processor, коммерческий продукт) [4], Gwyddion [5].
Способ сегментации путем пороговой обработки [3] выбран в качестве прототипа предлагаемого решения. Сегментация на основе пороговой обработки имеет недостатки. Первый недостаток связан с тем, что в случае, когда частицы имеют различные размеры и базовая поверхность, на которой лежат частицы, имеет некоторую кривизну или наклон, то «мелкие» частицы могут оказаться ниже порога и таким образом не будут идентифицированы. Второй недостаток связан с тем, что даже в случае, когда базовая поверхность является идеальной - достаточно плоской, при заданном уровне порога, сечение производится на разных относительных высотах для каждой частицы, большие частицы пересекаются на достаточно низком уровне высоты - ближе к основанию, в то время как маленькие частицы по верхушкам. В результате по-разному определяется сечение частиц и, как следствие, латеральные характеристики частиц. Третий недостаток связан с тем, что пороговый метод не разделяет соприкасающиеся и слипшиеся частицы. Все это приводит к ухудшению качества идентификации частиц и уменьшению достоверности измерения геометрических характеристик частиц.
Технический результат предлагаемого изобретения заключается в улучшении качества идентификации частиц и получении более полной и достоверной информации о геометрических характеристиках частиц, что приводит к повышению достоверности измерений распределений частиц по характерным параметрам (латеральным размерам, высоте, площади сечений, объему и т.д.).
Указанный технический результат достигается тем, что в способе выделения локальных объектов на цифровых изображениях поверхности, включающем пороговую обработку изображения, при которой для изображения, описываемого функцией f(x,y), в каждой точке (x,y) производится сравнение значения функции с заданным пороговым значением, и в зависимости от результата сравнения точки, в которых значение функции больше порогового, считаются принадлежащими к множеству точек локальных объектов (частиц), а меньше порогового не принадлежащими, до пороговой обработки, для функции f(x,y) рассчитывают автокорреляционную функцию и определяют максимальную корреляционную длину; выделяют множество начальных точек, соответствующих точкам локальных максимумов функции f(x,y), каждую начальную точку отождествляют с отдельной частицей и считают центром частицы; устанавливают вокруг каждой начальной точки локальную область радиусом в несколько корреляционных длин, устанавливают вокруг каждой начальной точки ограничительную область, которая в начальный момент считается равной локальной, считается, что частица локализована в пределах ограничительной области и граница частицы не может выходить за пределы этой области; для каждой частицы: устанавливают свой локальный нулевой уровень, равный среднему значению функции по нескольким самым низким точкам в локальной области, определяют высоту частицы как разницу между значением функции f(x,y) в локальном максимуме и значением локального нулевого уровня; по заданной величине относительного порога, который тождественно равен уровню относительной высоты, для которого хотят получить горизонтальные сечения частиц, устанавливают для каждой частицы свой локальный уровень порога, равный сумме локального нулевого уровня и высоты частицы, умноженной на заданное значение относительного порога; и далее для каждой частицы в пределах ее ограничительной области проводят пороговую обработку со своим локальным уровнем порога; и далее для каждой частицы в пределах ограничительной области проводят пороговую обработку с установленным локальным уровнем порога, строят сечение частицы на уровне локального порога, находят границу сечения и рассчитывают геометрические характеристики частицы.
Существует вариант, в котором перед определением высот частиц производят сортировку близкорасположенных частиц для устранения второстепенных максимумов на вершинах следующим образом: для каждой частицы рассматривают окрестность радиусом, равным произведению корреляционной длины на заданный коэффициент, величина которого лежит в интервале [0, 1], и все локальные максимумы, лежащие в этой окрестности и имеющие меньшую высоту, исключают из множества частиц.
Существует также вариант, в котором после определения высот частиц производят сортировку частиц для устранения мелких шумовых максимумов следующим образом: все частицы, высота которых меньше порогового значения, равного произведению среднеквадратичной шероховатости на заданный коэффициент, исключают из множества частиц.
Существует также вариант, в котором перед определением локального порога, последовательно для всех пар частиц, локальные области которых перекрываются, производят уточнение ограничительных областей следующим образом: для каждой частицы рассматриваемой пары ограничительную область разделяют на две части линией, перпендикулярной отрезку, соединяющему точки максимумов, и проходящей через точку отрезка, в котором функция f(x,y) имеет минимум на отрезке, и производят уменьшение ограничительной области частицы путем исключения части, не содержащей центра частицы.
Существует также вариант, в котором после уточнения ограничительных областей частиц, локальные области которых перекрываются, производят второй этап уточнения ограничительных областей всех частиц следующим образом: в плоскости XY из центральной точки частицы проводят радиальные линии во всех направлениях и вдоль этих линий проводят сечения поверхности, для каждого направления на кривой сечения находят точку с максимальным наклоном и через эту точку проводят касательную до пересечения с локальным нулевым уровнем, найденную точку пересечения касательной с нулевым уровнем принимают за граничную точку частицы в рассматриваемом направлении, совокупность найденных граничных точек для всех направлений образует предельную границу частицы, предельная граница частицы считается границей уточненной ограничительной области частицы.
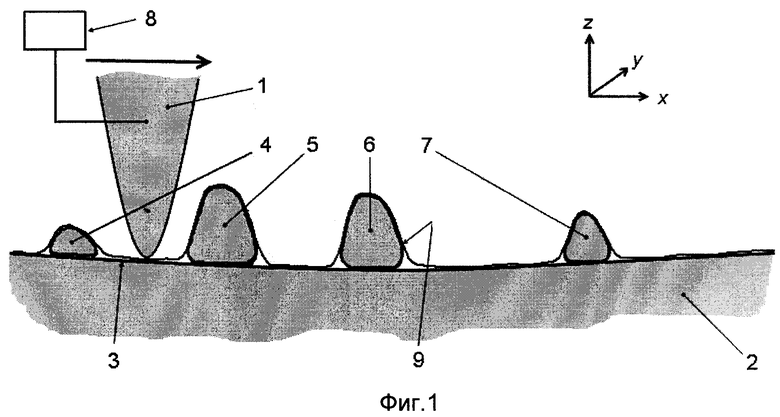
Фиг.1. Схематическое изображение процесса сканирования зондом атомно-силового микроскопа поверхности образца.
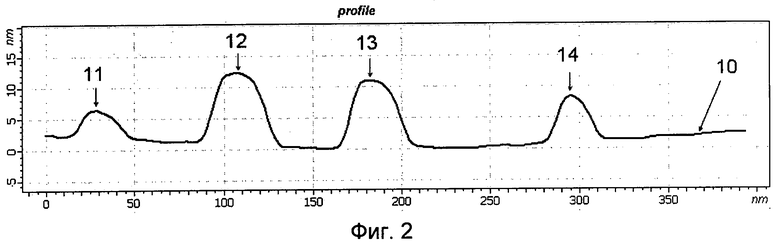
Фиг.2. Профиль поверхности, полученный в результате сканирования поверхности образца зондом вдоль строки.
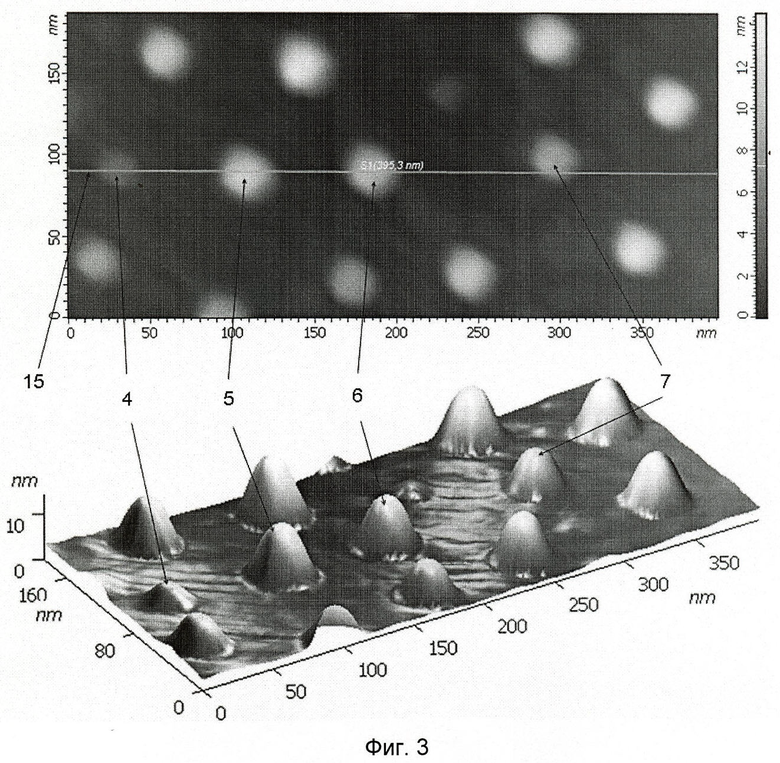
Фиг.3. СЗМ-изображение фрагмента поверхности образца, полученное в результате построчного сканирования зондом.
Фиг.4. Графическое пояснение сути предлагаемого способа.
Зонд 1 (фиг.1), представляющий собой острую иглу, движется вдоль образца 2 (фиг.1) в плоскости XY (горизонтально) по линии, совпадающей с осью Х (строки сканирования). Поверхность образца представляет собой суперпозицию базовой поверхности 3 (фиг.1) и локальных объектов - частиц 4, 5, 6, 7 (фиг.1), расположенных на этой базовой поверхности. Одновременно с горизонтальным движением система обратной связи зондового микроскопа 8 (фиг.1) перемещает зонд в вертикальном направлении (вдоль оси Z) таким образом, чтобы величина параметра взаимодействия зонда с поверхностью образца была постоянной (подробно смотри в работе [6]). В результате измерения траектории движения зонда 9 (фиг.1) получают профиль поверхности образца 10 (фиг.2) вдоль строки сканирования, соответственно частицы 4, 5, 6, 7 (фиг.1) на этом профиле проявляются в виде локальных максимумов 11, 12, 13, 14 (фиг.2). Построчное сканирование поверхности образца в результате возврата зонда в исходную точку строки после завершения сканирования строки и перехода на следующую строку сканирования, смещенную относительно первой, и многократного повторения процесса сканирования позволяет получить СЗМ-изображение рельефа поверхности. Пример СЗМ-изображения показан на фиг.3 в виде топографического представления (верхняя часть) и трехмерного представления (нижняя часть). Линия 15 (фиг.3) на топографическом изображении соответствует профилю, приведенному на фиг.2. Частицы 4, 5, 6, 7 (фиг.1) соответствуют локальным объектам = частицам 4, 5, 6, 7 на СЗМ-изображении (фиг.3). Фиг.4 графически поясняет суть предлагаемого способа на примере фрагмента профиля сечения поверхности, проходящего через два локальных максимума функции f(x,у): первый локальный максимум 16 (фиг.4) и второй локальный максимум 17 (фиг.4), отождествляемых соответственно с первой частицей, М1, и второй частицей, М2. Вокруг каждой центральной точки частицы (точки локального максимума функции) показаны локальные области 18 (фиг.4), показаны локальные нулевые уровни: 19 (фиг.4) - локальный нулевой уровень частицы М1 и 20 (фиг.4) - локальный нулевой уровень частицы М2, общий нулевой уровень 25 (фиг.4) - начало отсчета функции f(x,у). Показаны высоты частиц: 21 (фиг.4) - высота частицы М1 и 22 (фиг.4) - высота частицы М2. Показаны локальные уровни порога: 23 (фиг.4) - локальный уровень порога для частицы М1 и 24 (фиг.4) - локальный уровень порога для частицы М2, соответствующие заданному значению относительного порога (уровню относительной высоты), равному 0.5.
Способ выделения локальных объектов на цифровых изображениях поверхности, в частности цифровых СЗМ-изображений, полученных методами сканирующей зондовой микроскопии в результате построчного сканирования зондом (острой иглой) поверхности, на которой расположены локальные объекты - частицы (фиг.1, фиг.2, фиг.3), и включающем пороговую обработку изображения, при которой для изображения, описываемого функцией f(x,y), в каждой точке (x,у) производится сравнение значения функции f(x,y) с заданным пороговым значением, и в зависимости от результата сравнения точки, в которых значение функции больше порогового, считаются принадлежащими к множеству точек локальных объектов (частиц), а меньше порогового не принадлежащими, реализуется следующим образом. Вначале, до пороговой обработки, выполняют ряд следующих действий. Для функции z=f(x,y), описывающей поверхность (т.е. функции высоты z=f(x,y), отсчитываемой от определенной базовой плоскости XY и заданной в определенной области этой базовой плоскости), рассчитывают автокорреляционную функцию и определяют максимальную корреляционную длину. Это делается для того, чтобы получить оценку среднего латерального размера частиц и определить размеры локальной области, в пределах которой находится частица. Затем выделяют множество начальных точек, соответствующих точкам локальных максимумов функции f(x,y), каждую начальную точку отождествляют с отдельной частицей и считают центром частицы. Вокруг каждой начальной точки устанавливают локальную область радиусом, равным нескольким корреляционным длинам. В этой локальной области находятся как точки, принадлежащие частице, так и точки, принадлежащие базовой поверхности, на которой расположена частица, причем точки, ближайшие к частице. Вокруг каждой начальной точки устанавливают ограничительную область, которая в начальный момент считается равной локальной области. Считается, что частица локализована в пределах ограничительной области и граница частицы не может выходить за пределы этой области. Затем для каждой частицы устанавливают свой локальный нулевой уровень, равный среднему значению функции по нескольким самым низким точкам в локальной области. На примере на фиг.4, где поясняется графически суть предлагаемого способа, изображен профиль сечения, проходящий через два максимума 16, 17 (фиг.4), отождествляемых с частицами M1 и М2, показаны локальные области вокруг частиц 18 (фиг.4), локальный нулевой уровень первой частицы 19 (фиг.4), локальный нулевой уровень второй частицы 20 (фиг.4). После определения локальных нулевых уровней частиц определяют, для каждой частицы, высоту частицы (максимальный вертикальный размер частицы) как разницу между значением функции f(x,y) в локальном максимуме и значением локального нулевого уровня:
высота частицы = (значение функции в максимуме) - (локальный нулевой уровень).
На примере показаны высота первой частицы 21 (фиг.4), высота второй частицы 22 (фиг.4). Введение для каждой частицы локального нулевого уровня позволяет исключить влияние кривизны базовой поверхности и более точно определить вертикальные характеристики частицы. Кроме того, введение для каждой частицы локальной области, локального нулевого уровня и высоты частицы позволяет ввести для каждой частицы свою локальную систему координат с началом отсчета по высоте от локального нулевого уровня. В этой локальной системе координат поверхность каждой k-й частицы описывается своей функцией относительной высоты,
fk относит(x,y), определяемой как высота точек поверхности частицы, отсчитываемая от локального нулевого уровня и нормированная на высоту частицы:
 .
.
Значения функции относительной высоты лежат в интервале от нуля до единицы. Задание определенного уровня относительной высоты, одинакового для всех частиц, fk относит(x,y)=const, определяет для каждой частицы свой уровень функции f(x,y), соответствующий этому заданному уровню относительной высоты: 
Далее, по заданной величине относительного порога, который тождественно равен уровню относительной высоты, для которого хотят получить горизонтальные сечения частиц, устанавливают для каждой частицы свой локальный уровень порога. Локальный уровень порога определяется как сумма локального нулевого уровня и высоты частицы, умноженной на заданное значение относительного порога (заданный уровень относительной высоты):
локальный уровень порога = (локальный нулевой уровень) +
+ (высота частицы) * (относительный порог).
Относительный порог может иметь значения в интервале от нуля до единицы. При значении относительного порога, равном единице, для каждой частицы будет устанавливаться локальный уровень порога, который совпадает с уровнем высоты, соответствующим значению функции f(x,y) в максимуме. При значении относительного порога, равном 0.5 для каждой частицы, будет установлен свой локальный уровень порога, который совпадает с уровнем высоты, проходящим на половине высоты частицы. Соответственно, при значении относительного порога, равном нулю для каждой частицы, будет установлен свой локальный уровень порога, который совпадает с высотой, соответствующей локальному нулевому уровню частицы. На примере на фиг.4 показаны: локальный уровень порога для первой частицы 23 (фиг.4) и локальный уровень порога для второй частицы 24 (фиг.4) при значении относительного порога (уровне относительной высоты), равном 0.5. После того как установлены уровни локального порога, производят, для каждой частицы и только в пределах соответствующей ей ограничительной области, пороговую обработку с установленным для данной частицы уровнем локального порога, строят сечение частицы на уровне локального порога, находят границу сечения и рассчитывают геометрические характеристики частицы (площадь сечения, латеральные характеристики частицы для заданного значения относительной высоты, вертикальные, ориентационные, объемные характеристики частицы).
Существует также вариант, в котором перед определением высот частиц производят сортировку близкорасположенных частиц для устранения второстепенных максимумов на вершинах следующим образом: для каждой частицы рассматривают окрестность радиусом, равным произведению корреляционной длины на заданный коэффициент, величина которого лежит в интервале [0, 1], и все локальные максимумы, лежащие в этой окрестности и имеющие меньшую высоту, исключают из множества частиц.
Существует также вариант, в котором после определения высот частиц производят сортировку частиц для устранения мелких шумовых максимумов следующим образом: все частицы, высота которых меньше порогового значения, равного произведению среднеквадратичной шероховатости на заданный коэффициент, исключают из множества частиц.
Существует также вариант, в котором перед определением локального порога, последовательно для всех пар частиц, локальные области которых перекрываются, производят уточнение ограничительных областей следующим образом: для каждой частицы рассматриваемой пары ограничительную область разделяют на две части линией, перпендикулярной отрезку, соединяющему точки максимумов, и проходящей через точку отрезка, в котором функция f(x,y) имеет минимум на отрезке, и производят уменьшение ограничительной области частицы путем исключения части, не содержащей центра частицы.
Существует также вариант, в котором после уточнения ограничительных областей частиц, локальные области которых перекрываются, производят второй этап уточнения ограничительных областей всех частиц (в пределах ограничительных областей) следующим образом (методом радиальных сечений из центра): в плоскости XY из центральной точки частицы проводят радиальные линии во всех направлениях и вдоль этих линий проводят сечения поверхности, для каждого направления на кривой сечения находят точку с максимальным наклоном и через эту точку проводят касательную до пересечения с локальным нулевым уровнем, найденную точку пересечения касательной с нулевым уровнем принимают за граничную точку частицы в рассматриваемом направлении, совокупность найденных граничных точек для всех направлений образует предельную границу частицы, предельная граница частицы считается границей уточненной ограничительной области частицы.
Предложенный способ может быть использован для обработки не только СЗМ-изображений, а также и любых других цифровых изображений, описываемым функцией двух переменных f(x,y).
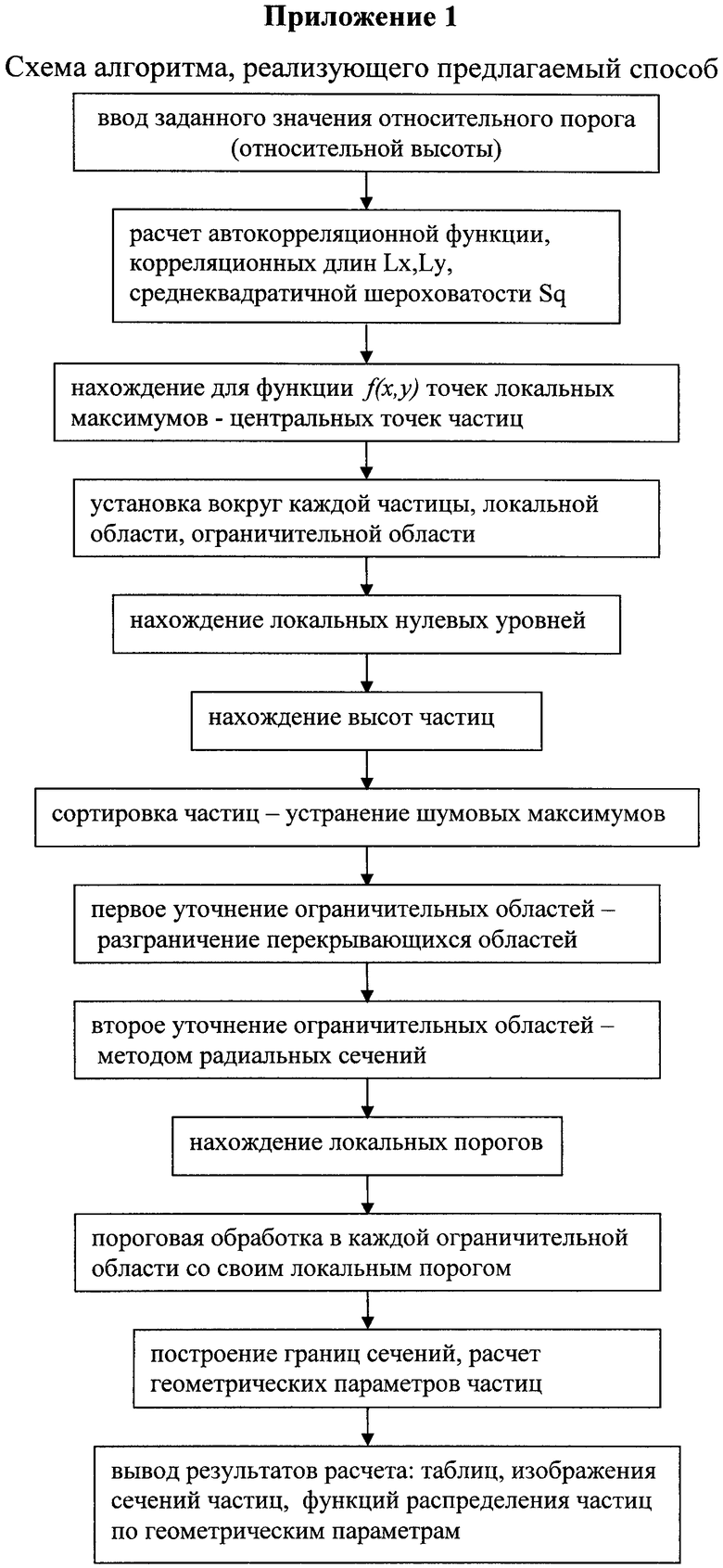
Указанный способ выделения локальных объектов на цифровых изображениях поверхности был реализован в виде компьютерной программы. Схема алгоритма программы, реализующего предлагаемый способ, приведена в приложении 1.
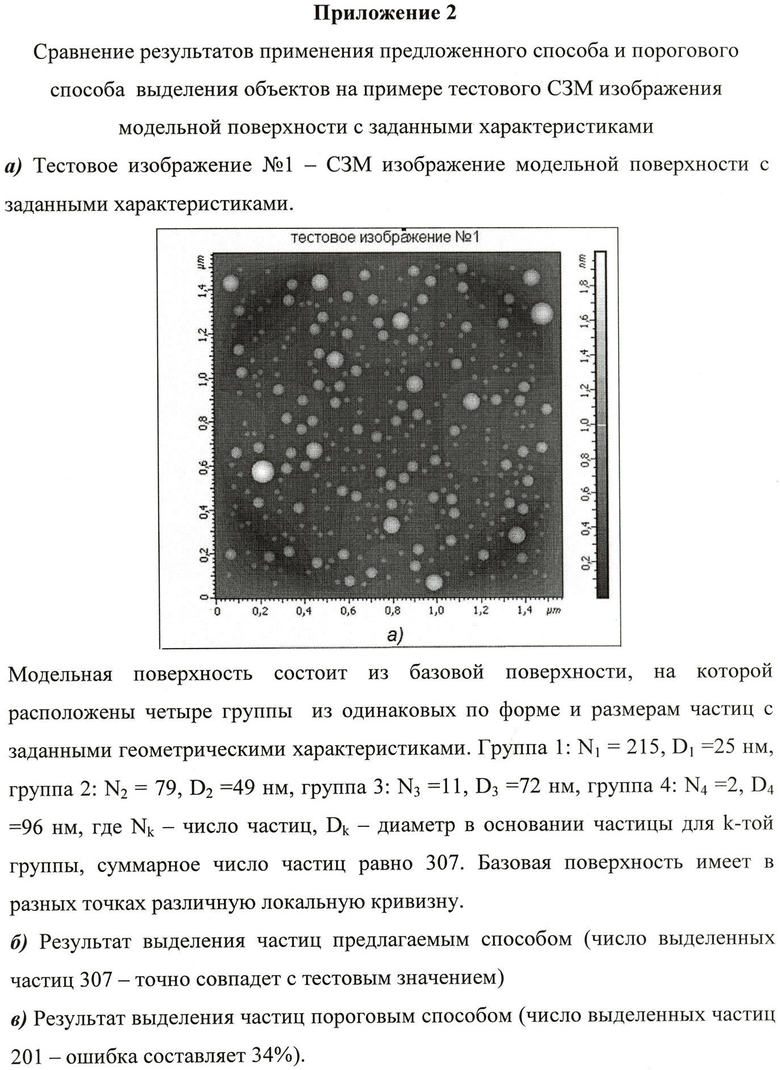
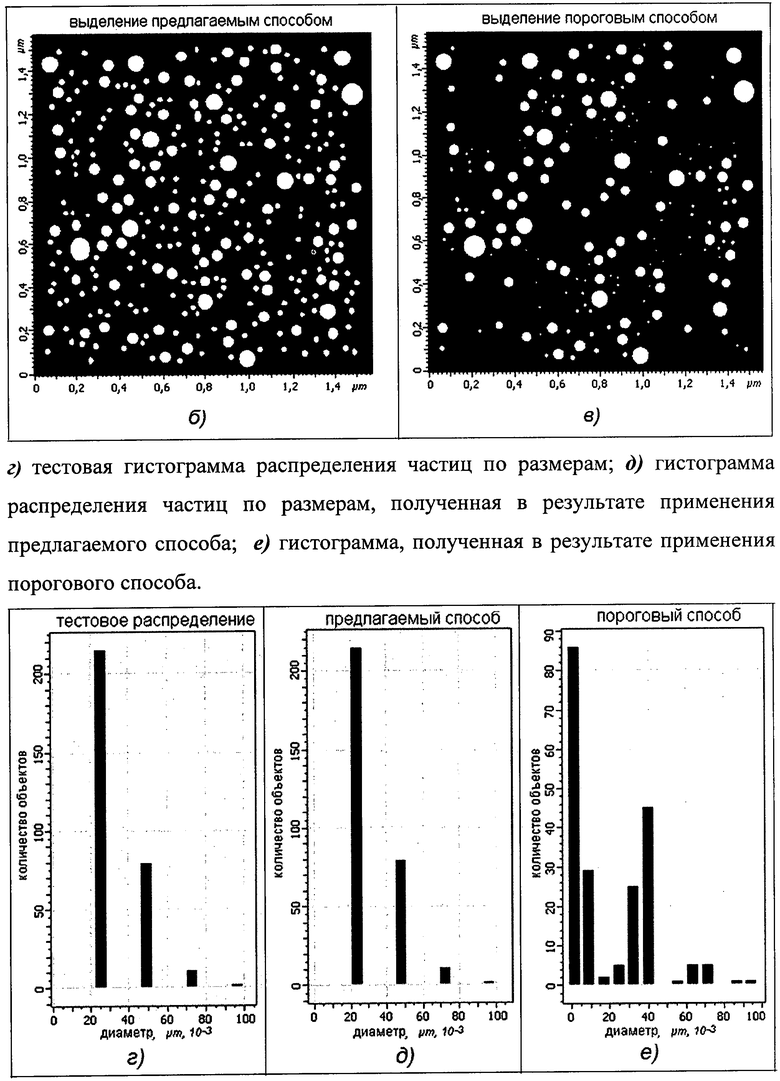
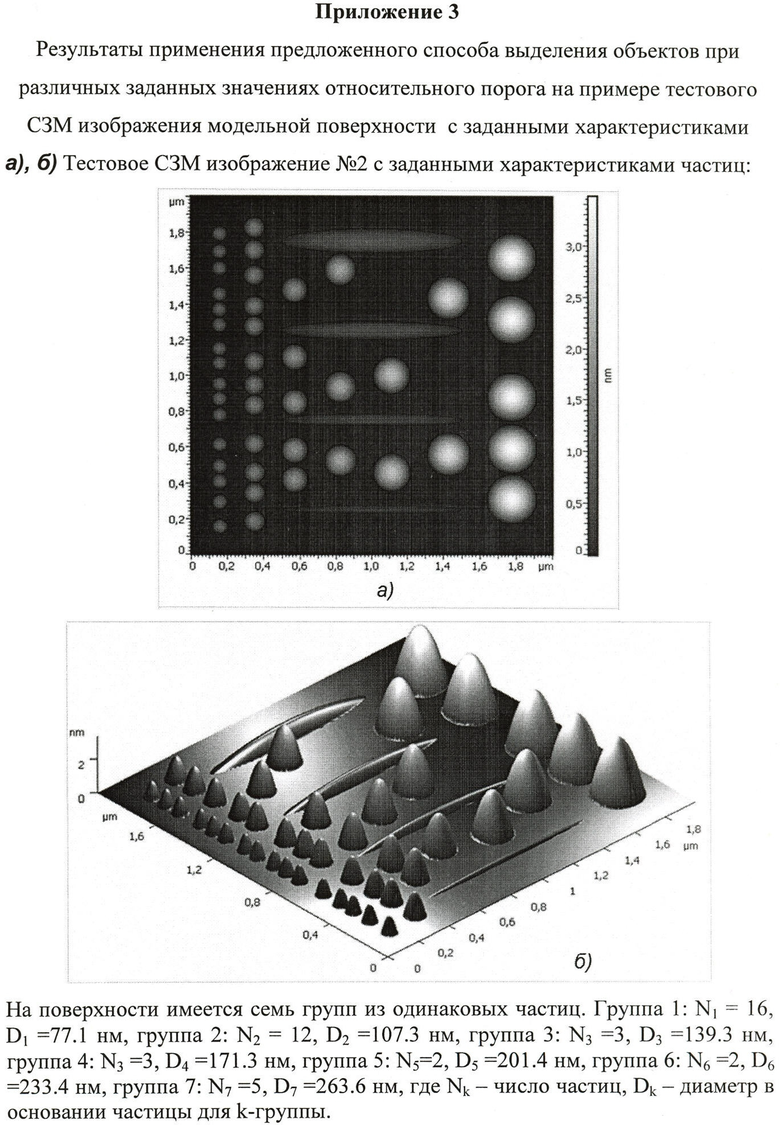
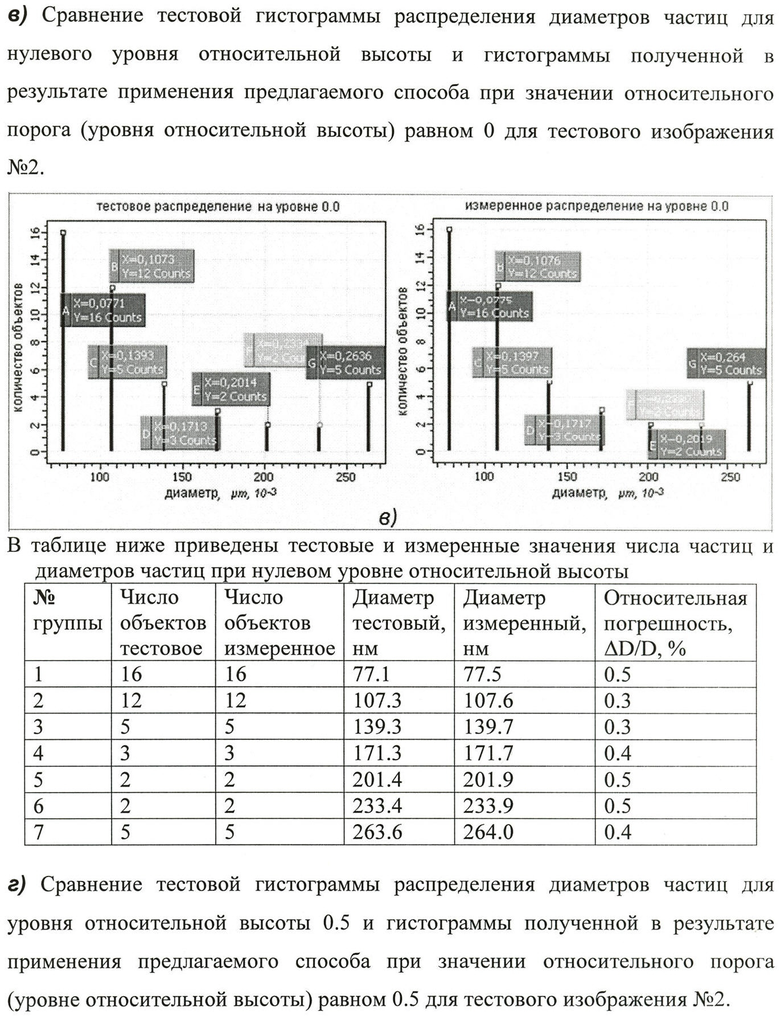
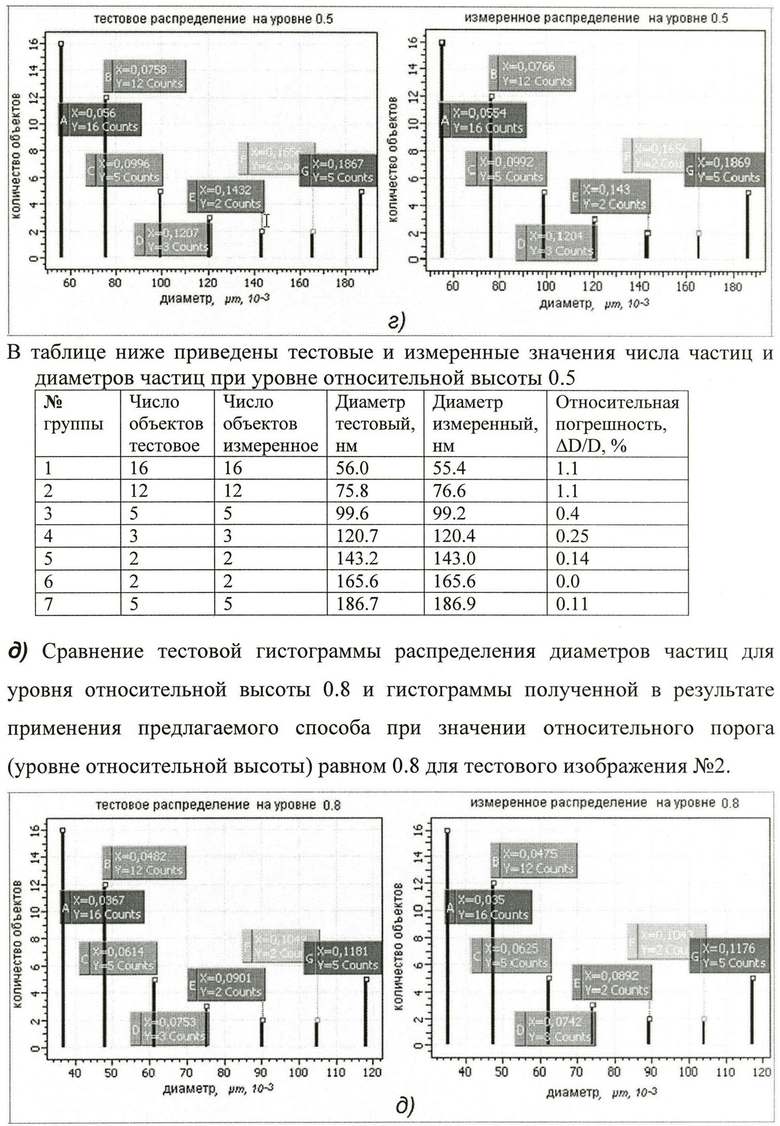
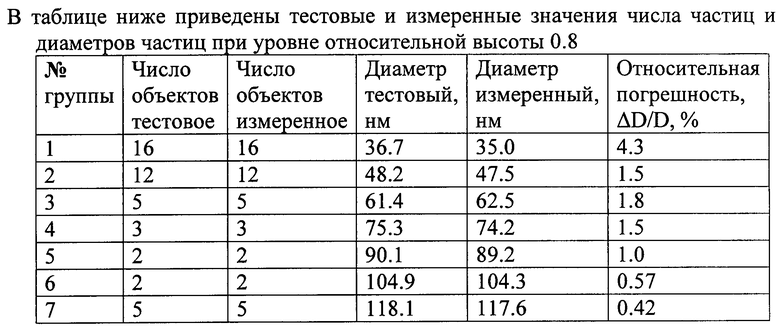
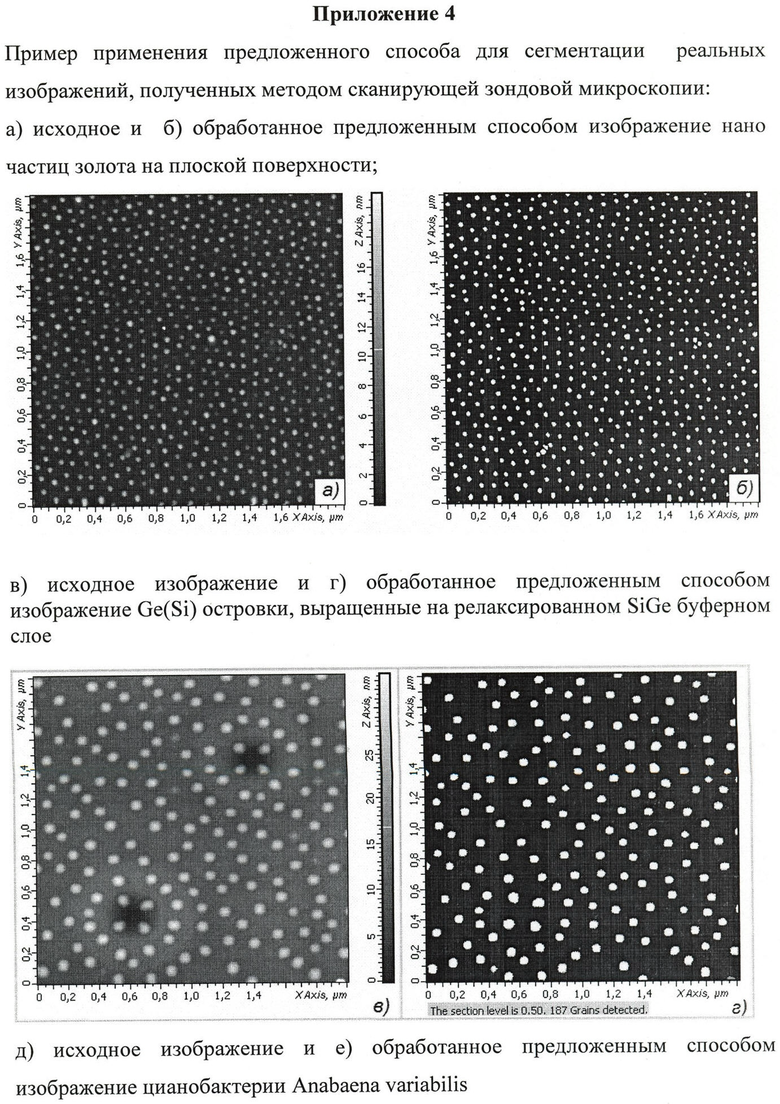
Сравнение результатов применения предложенного способа и порогового способа выделения объектов на примере тестового СЗМ- изображения модельной поверхности с заданными характеристиками приводится в приложении 2. Результаты применения предложенного способа выделения объектов при различных заданных уровнях относительного порога на примере тестового СЗМ-изображения модельной поверхности с заданными характеристиками приводятся в приложении 3. Результаты применения предлагаемого способа при выделении объектов на реальных СЗМ-изображениях приведены в приложении 4.
Выполнение расчета автокорреляционной функции для функции f(x,y), описывающей поверхность, и нахождение корреляционной длины позволяют установить около каждой частицы локальную область, в которой, кроме частицы, содержатся ближайшие к частице точки базовой поверхности, и по этим точкам базовой поверхности определить для каждой частицы локальный нулевой уровень, который принимается за начало отсчета высоты рассматриваемой частицы, что позволяет исключить кривизну базовой поверхности и более точно определить вертикальные и горизонтальные характеристики частиц, что ведет к повышению достоверности измерений распределений частиц по характерным параметрам.
Использование выделения начальных точек, соответствующих точкам локальных максимумов функции f(x,y), которые считаются центрами частиц, и установка вокруг каждой начальной точки ограничительной области позволяют выделить на области определения исходной функции f(x,y) локальные области, в пределах которых локализованы частицы, и производить поиск границ латеральных сечений частиц только в пределах этих ограничительных областей, используя пороговую обработку для каждой ограничительной области со своим порогом, который устанавливается из условия равенства для всех частиц уровня относительной высоты, для которого строится сечение, что позволяет более точно определять горизонтальные характеристики частиц и что в результате приводит к повышению достоверности измерений распределений частиц по характерным параметрам.
Использование локальных нулевых уровней частиц и заданного значения относительного порога (заданного уровня относительной высоты) позволяет для каждой частицы установить свой уровень порога, на котором определяется горизонтальное сечение частицы, соответствующее заданному уровню относительной высоты, одинаковому для всех частиц, что позволяет более точно определять горизонтальные характеристики частиц и что в результате приводит к повышению достоверности измерений распределений частиц по характерным параметрам.
Применение сортировки близкорасположенных частиц посредством рассмотрения для каждой частицы окрестности радиусом, равным произведению корреляционной длины на заданный коэффициент, и исключение всех локальных максимумов, лежащих в этой окрестности и имеющих меньшую высоту, чем рассматриваемая частица, из множества частиц устраняют второстепенные максимумы на вершинах частиц, что улучшает качество идентификации частиц и в результате приводит к повышению достоверности измерений распределений частиц по характерным параметрам.
Применение сортировки частиц, при которой после определения высот частиц все частицы, высота которых меньше порогового значения, равного произведению среднеквадратичной шероховатости на заданный коэффициент, устраняются из дальнейшего рассмотрения, позволяет устранять мелкие шумовые максимумы, лежащие в «долинах» изображения, что улучшает качество идентификации частиц и в результате приводит к повышению достоверности измерений распределений частиц по характерным параметрам.
Таким образом, создан способ выделения объектов, позволяющий выделять границы горизонтальных сечений частиц на заданном уровне относительной высоты и определять вертикальные характеристики частиц, а также латеральные характеристики для заданного уровня относительной высоты, что позволяет повысить достоверность измерений распределений частиц по характерным параметрам (латеральным размерам, высоте, площади сечений, объему и т.д.).
ЛИТЕРАТУРА
1. Гонсалес Р., Вудс Р. Цифровая обработка изображений. М.: Техносфера. 2005. - С.881-893.
2. Vincent L., Soille P., Watersheds in Digital Spaces: An Efficient algorithm Based on Immersion Simulations, IEEE Transactions of Pattern Analysis and Machine Intelligence, vol.13, no.6, June 1991, pp.583-598.
3. Гонсалес Р., Вудс Р., Эддинс С. Цифровая обработка изображений в среде MATLAB, М.: Техносфера, 2006, с.436-443.
4. The Scanning Probe Image Processor, SPIP [Электронный ресурс] - http://www.imagemet.com/index.php?main=products - страница в интернете
5. Gwyddion [Электронный ресурс] - http://www.gwyddion.net
6. Миронов В.Л. Основы сканирующей зондовой микроскопии. М.: Техносфера, 2009, с.13-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486597C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ РАСПРЕДЕЛЕННОЙ КАЛИБРОВКИ СКАНЕРА ЗОНДОВОГО МИКРОСКОПА | 2005 |
|
RU2295783C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ В СКАНИРУЮЩЕЙ ЗОНДОВОЙ МИКРОСКОПИИ | 2017 |
|
RU2698953C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СКРЫТЫХ ПРЕДМЕТОВ НА ТЕРАГЕРЦЕВЫХ ИЗОБРАЖЕНИЯХ ТЕЛА ЧЕЛОВЕКА | 2019 |
|
RU2702913C1 |
| СПОСОБ РАСЧЕТА ДВИЖЕНИЯ С КОРРЕКЦИЕЙ ОККЛЮЗИЙ | 2012 |
|
RU2517727C2 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ СКАНИРУЮЩИМ ЗОНДОВЫМ МИКРОСКОПОМ | 1999 |
|
RU2175761C2 |
| Способ автоматического распознавания сцен и объектов на изображении | 2021 |
|
RU2778906C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2442184C1 |
| КОМПЛЕКСНАЯ КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2525601C1 |
Изобретение относится к цифровой обработке изображений, полученных методами сканирующей зондовой микроскопии (СЗМ-изображений). Техническим результатом является улучшение качества идентификации частиц и получение более полной и достоверной информации о геометрических характеристиках частиц, что приводит к повышению достоверности измерений распределений частиц по характерным параметрам. Разработан способ выделения локальных объектов (частиц) на цифровых изображениях поверхности, основанный на выделении локальных областей, содержащих частицы, и пороговой обработке этих областей с уровнями порога, определяемыми из заданного уровня относительной высоты (заданного значения относительного порога), для которого строятся границы горизонтальных сечений частиц. Способ позволяет выделять границы горизонтальных сечений частиц на заданном уровне относительной высоты, определять вертикальные характеристики частиц, а также латеральные характеристики частиц для заданного уровня относительной высоты, что позволяет повысить достоверность измерений распределений частиц по характерным параметрам (латеральным размерам, высоте, площади сечений, объему и т.д.). 4 з.п. ф-лы, 4 ил.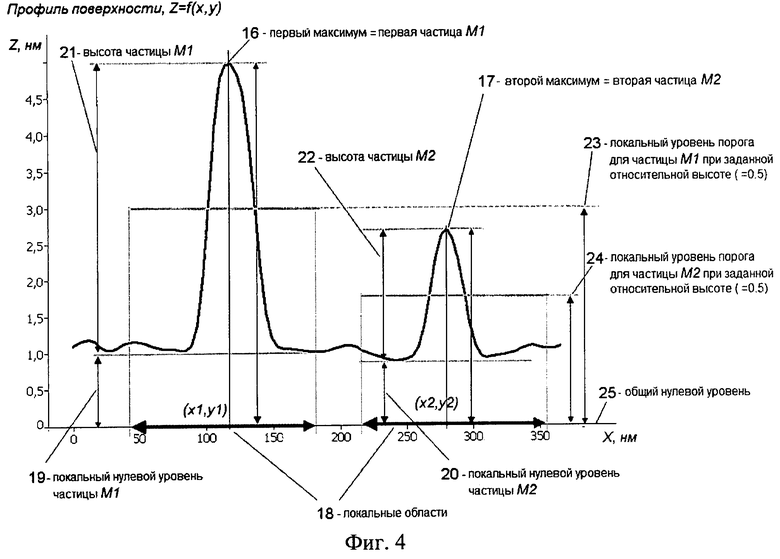
1. Способ выделения локальных объектов на цифровых изображениях поверхности, включающий пороговую обработку изображения, при которой для изображения, описываемого функцией f(x,y), в каждой точке (х,y) производится сравнение значения функции с заданным пороговым значением, и в зависимости от результата сравнения точки, в которых значение функции больше порогового, считаются принадлежащими к множеству точек локальных объектов (частиц), а меньше порогового не принадлежащими, отличающийся тем, что до пороговой обработки: рассчитывают для функции f(x,y) автокорреляционную функцию и определяют максимальную корреляционную длину; выделяют множество начальных точек, соответствующих точкам локальных максимумов функции f(x,y), отождествляют каждую начальную точку с отдельной частицей и считают центром частицы; устанавливают вокруг каждой начальной точки локальную область радиусом в несколько корреляционных длин; устанавливают вокруг каждой начальной точки ограничительную область, которая в начальный момент считается равной локальной, считается, что частица локализована в пределах ограничительной области и граница частицы не может выходить за пределы этой области; для каждой частицы устанавливают свой локальный нулевой уровень, равный среднему значению функции по нескольким самым низким точкам в локальной области; для каждой частицы определяют высоту частицы как разницу между значением функции f(x,y) в локальном максимуме и значением локального нулевого уровня; далее по заданной величине относительного порога, который тождественно равен уровню относительной высоты, для которого хотят получить горизонтальные сечения частиц, устанавливают для каждой частицы свой локальный уровень порога, равный сумме локального нулевого уровня и высоты частицы, умноженной на заданное значение относительного порога; и далее для каждой частицы в пределах ее ограничительной области проводят пороговую обработку со своим локальным уровнем порога, строят сечение частицы на уровне локального порога, находят границу сечения и рассчитывают геометрические характеристики частицы.
2. Способ по п.1, отличающийся тем, что перед определением высот частиц производят сортировку близкорасположенных частиц для устранения второстепенных максимумов на вершинах следующим образом: для каждой частицы рассматривают окрестность радиусом, равным произведению корреляционной длины на заданный коэффициент, величина которого лежит в интервале [0, 1], и все локальные максимумы, лежащие в этой окрестности и имеющие меньшую высоту, исключают из множества частиц.
3. Способ по п.1, отличающийся тем, что после определения высот частиц производят сортировку частиц для устранения мелких шумовых максимумов следующим образом: все частицы, высота которых меньше порогового значения, равного произведению среднеквадратичной шероховатости на заданный коэффициент, исключают из множества частиц.
4. Способ по п.1, отличающийся тем, что перед определением локального уровня порога последовательно для всех пар частиц, локальные области которых перекрываются, производят уточнение ограничительных областей следующим образом: для каждой частицы рассматриваемой пары ограничительную область разделяют на две части линией, перпендикулярной отрезку, соединяющему точки максимумов, и проходящей через точку отрезка, в котором функция f(x,y) имеет минимум на отрезке, и производят уменьшение ограничительной области частицы путем исключения части, не содержащей центра частицы.
5. Способ по п.4, отличающийся тем, что после уточнения ограничительных областей частиц, локальные области которых перекрываются, производят второй этап уточнения ограничительных областей всех частиц следующим образом: в плоскости XY из центральной точки частицы проводят радиальные линии во всех направлениях и вдоль этих линий проводят сечения поверхности, для каждого направления на кривой сечения находят точку с максимальным наклоном и через эту точку проводят касательную до пересечения с локальным нулевым уровнем, найденную точку пересечения касательной с нулевым уровнем принимают за граничную точку частицы в рассматриваемом направлении, совокупность найденных граничных точек для всех направлений образует предельную границу частицы, предельная граница частицы считается границей уточненной ограничительной области частицы.
| СПОСОБ ИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ СКАНИРУЮЩИМ ЗОНДОВЫМ МИКРОСКОПОМ | 1999 |
|
RU2175761C2 |
| СПОСОБ НАНЕСЕНИЯ НАНОМАРКИРОВОК НА ИЗДЕЛИЯ | 2008 |
|
RU2365989C1 |
| Тепловой элемент для машины типа "Вокеш" | 1948 |
|
SU78575A1 |
| WO 2008060624 А2, 22.05.2008. | |||

