Изобретение относится зажимам для сжатия листов, используемым в сочетании с механическим манипулятором-роботом. Указанный робот может применяться либо для перемещения зажима относительно набора листов, либо, наоборот, для перемещения набора листов относительно зажима, который в этом случае закреплен на жестком основании.
В частности, объектом настоящего изобретения является зажим для электродуговой сварки, содержащий жесткую раму, связанную с несущим элементом, таким как жесткое основание или робот-манипулятор, узел, называемый сочленением, который связан с рамой и содержит неподвижную первую руку, с которой неподвижно соединен неподвижный первый конец, подвижную вторую руку, с которой неподвижно соединен подвижный второй конец, и главный или сварочный привод, опирающийся на указанную неподвижную руку для перемещения подвижной руки относительно неподвижной руки с одной степенью свободы поступательно или вращательно для смыкания или размыкания зажима с целью сжатия набора соединяемых листов между неподвижной и подвижной руками (сдвигаемыми посредством привода) или высвобождения сборки листов путем раздвигания рук посредством привода,
Ниже описан принцип действия сварочного зажима по заявке FR 0604384, лишенного функции центровки или калибровки.
Однако проблемы одинаковы для любого типа зажима, предназначенного для сжатия набора листов и имеющего или нет дополнительную степень свободы между рамой и неподвижной рукой для обеспечения функции центровки или калибровки.
На известных зажимах для электродуговой сварки в зависимости от выполняемой работы возможны два типа кинематики подвижной руки:
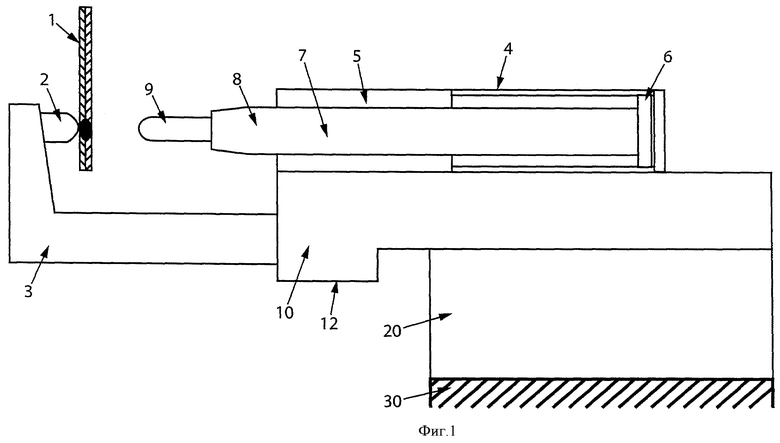
- одна степень свободы обеспечивает поступательное движение подвижной руки и ее конца относительно неподвижной руки с ее неподвижным концом за счет обеспечиваемого сварочным приводом перемещения по линейной направляющей, при этом привод является линейным приводом любого соответствующего типа, например гидравлическим, пневматическим, механическим или электрическим, который непосредственно перемещает подвижную руку; такой зажим, показанный на фиг.1, называют С- или J-образным;
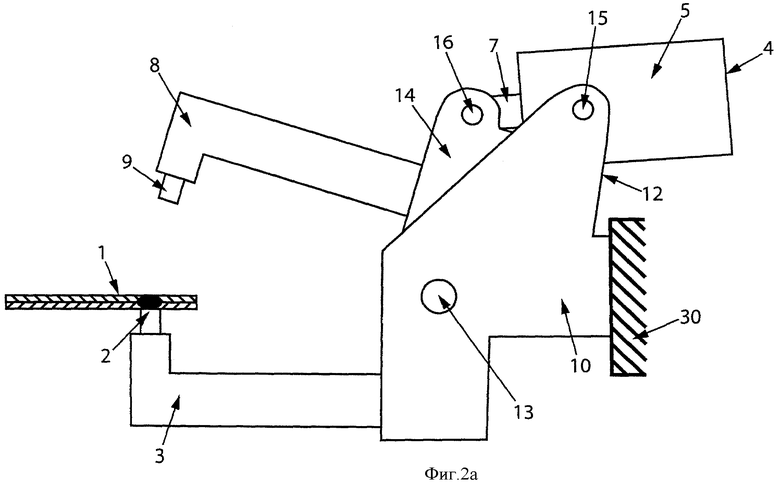
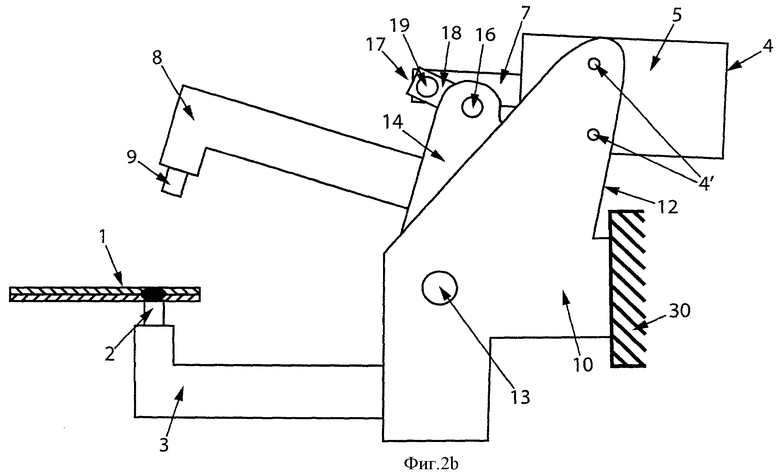
- одна степень свободы обеспечивает поворот подвижной руки и ее конца вокруг оси на раме по отношению к неподвижной руке, в этом случае зажим называют X-образным или ножничным, при этом сварочный привод может быть тоже линейным приводом, установленным либо с возможностью поворота его корпуса относительно рамы (фиг.2а) вокруг оси, параллельной оси шарнира подвижной руки, либо жестко закрепленным на этой раме (фиг.2b), при этом соответствующее механическое соединение с 2-мя степенями свободы позволяет при линейно перемещающемся штоке силового цилиндра обеспечить поворотное движение подвижной руки вокруг шарнирной оси. Поворотное усилие подвижной руки и ее конца передается от привода на подвижную руку через рычаг, с которым жестко соединена подвижная рука, поворачивающийся вокруг шарнирной оси, и на котором поворачивается конец штока привода, как показано на фиг.2а и 2b.
На фиг.1-11 одинаковые или аналогичные элементы С-образных или Х-образных зажимов обозначены одинаковыми позициями.
Для обеспечения точечной электрической сварки набора листов 1 известный С-образный зажим, показанный на фиг.1, а также зажим в соответствии с настоящим изобретением, показанный на фиг.3, 4 и 5, содержат неподвижный концевой электрод 2, установленный на конце неподвижной руки 3, жестко соединенной с рамой 10. На раму 10 опирается сварочный привод 4, например, в виде пневматического силового цилиндра, поршень 6 и шток 7 которого неподвижно соединены с подвижной рукой 8, являющейся продолжением штока 7. Свободный конец подвижной руки 8 несет подвижный концевой электрод 9. Эти элементы образуют называемый сочленением узел 12, жестко связанный с называемыми несущими элементами роботом-манипулятором или жестким основанием 30.
Точно так же в известном Х-образном зажиме, показанном на фиг.2а, как и на зажиме в соответствии с настоящим изобретением, показанном на фиг.6, 7 и 8, неподвижный концевой электрод 2 и неподвижная рука 3 жестко соединены с рамой 10, на которой имеется поворотная ось 13, вокруг которой качается жесткий рычаг 14. На рычаге 14 установлена подвижная рука 8 с подвижным концевым электродом 9. Линейный сварочный привод 4 установлен с возможностью поворота своего корпуса 5 вокруг оси 16, параллельной оси 13, тогда как свободный конец штока 7 привода 4 приводит в действие рычаг 14, относительно которого шток 7 поворачивается вокруг оси 16, параллельной оси 13 и связанной с плечом рычага 14 таким образом, чтобы управлять поворотами подвижной руки 8 и ее конца 9 вокруг оси 13 по отношению к руке 3 с ее концом 2, неподвижным относительно рамы 10 инструмента. Так же, как и в случае описанного выше С-образного зажима, эти элементы образуют называемый сочленением узел 12, жестко связанный с роботом-манипулятором или жестким основанием 30, называемыми несущим элементом.
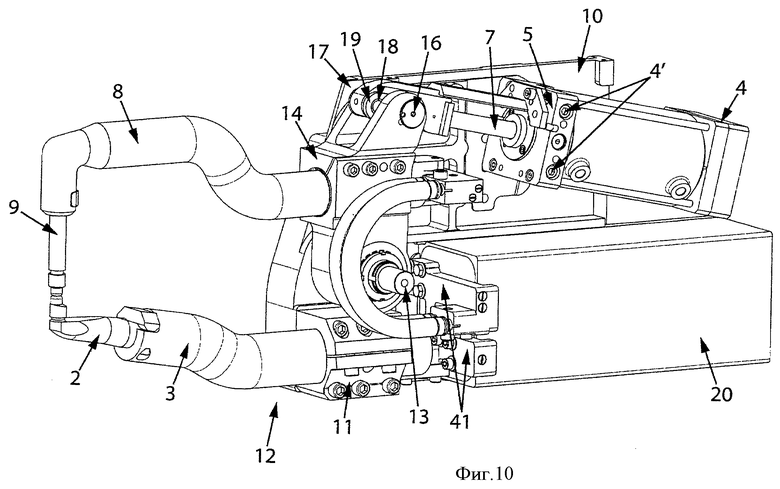
В варианте выполнения известного Х-образного зажима, показанного на фиг.2b, и Х-образного зажима согласно изобретению, показанного на фиг.10, поворот жесткого рычага 14, удерживающего подвижную руку 8 и подвижный конец 9, вокруг поворотной оси 13 управляется тоже линейным сварочным приводом 4, жестко закрепленным своим корпусом 5 посредством средств 4' крепления, таких как винты, на раме 10. Соответствующее механическое соединение 17 с 2-мя степенями свободы, например, такое как система тяг 18, установлено на свободном конце штока 7 с возможностью поворота на этом штоке 7 вокруг первой оси 19, параллельной оси 13, и второй оси 16, тоже параллельной оси 13, на плече рычага 14 таким образом, чтобы управлять поворотами подвижных руки 8 и конца 9 вокруг оси 13 по отношению к руке 3 и концу 2, неподвижным относительно рамы 10 инструмента, во время поступательных перемещений штока 7 сварочного привода 4. Так же как и в двух описанных выше вариантах С-образных и Х-образных зажимов, эти компоненты образуют называемый сочленением узел 12, жестко связанный с роботом-манипулятором или жестким основанием 30, являющимися несущим элементом.
Механическое соединение узла 12 с несущим элементом 30 можно осуществить:
- либо непосредственно, как показано на фиг.2а и 2b,
- либо при помощи одного или нескольких элементов, образующих жесткое соединение и входящих или не входящих в состав устройства. На фиг.1 показана возможность соединения посредством по меньшей мере одного другого жесткого элемента 20, являющегося или не являющегося частью зажима.
Этот элемент 20 может быть, например, встроенным в зажим сварочным трансформатором, устройством замены инструментов или центрирующим элементом, описанным в заявке FR 0604384.
Известная конструкция сварочных зажимов предполагает большое разнообразие рам в зависимости от используемого узла сочленения. Однако для комплекта, содержащего С-образные и Х-образные зажимы, никакая конструкция зажима не позволяет использовать раму соответствующей конструкции, обеспечивающую в зависимости от различных размеров и/или кинематики (С-образной и Х-образной) совместную работу таких узлов и управление ими.
Задачей настоящего изобретения является устранение этого недостатка и создание средств для реализации зажима и комплекта зажимов для сжатия листов, которые отвечают различным практическим требованиям лучше, чем аналогичные известные зажимы и комплекты зажимов.
В этой связи изобретением предлагается зажим вышеуказанного типа для сжатия листов, используемый в сочетании с механической рукой или роботом и содержащий жесткую раму, связанную с несущим элементом, таким как жесткое основание или указанный робот, сочленение, содержащее неподвижную первую руку, подвижную вторую руку и главный привод, опирающийся на указанную раму, на которой установлена упомянутая неподвижная рука, и выполненный с возможностью перемещения подвижной руки по отношению к неподвижной руке с одной степенью свободы поступательно или вращательно для смыкания или размыкания зажима для сжатия набора листов между неподвижной и подвижной руками или освобождения набора листов, соответственно, при этом в соответствии с изобретением зажим входит в комплект зажимов с С-образной и X-образной кинематикой, а рама имеет подобные форму и внешний вид для всех зажимов из указанного комплекта зажимов.
Предпочтительно раму можно использовать в качестве средства крепления кронштейна или любого другого компонента или соединения механических компонентов, обеспечивающих жесткое соединение между указанной рамой и несущим элементом, таким как механическая рука или жесткое неподвижное основание.
Как известно, зажим может не иметь функции центровки или калибровки.
Если зажим является зажимом Х-образным, в котором поворот жесткого рычага с установленной на нем подвижной рукой и ее концом вокруг оси поворота управляется линейным главным приводом, то согласно первому варианту выполнения корпус этого привода может поворачиваться на раме вокруг оси, параллельной оси поворота рычага, тогда как свободный конец штока привода приводит в действие рычаг, связанный со штоком с возможностью поворота вокруг другой оси, тоже параллельной оси поворота рычага и связанной с плечом рычага таким образом, чтобы управлять поворотами подвижной руки вокруг оси поворота рычага относительно неподвижной руки с ее неподвижным концом и относительно рамы Х-образного зажима.
Согласно второму варианту выполнения Х-образного зажима, корпус главного линейного привода жестко закреплен посредством средств крепления, таких как винты, на раме, при этом шток связан с плечом рычага посредством механического соединения с двумя степенями свободы, такого как стержневая система, в которой стержень шарнирно связан со свободном концом штока с возможностью поворота вокруг первой оси, параллельной оси поворота рычага, и с плечом рычага с возможностью поворота вокруг второй оси, тоже параллельной оси поворота рычага, чтобы управлять поворотами подвижной руки и ее конца вокруг оси поворота рычага относительно неподвижной руки и ее конца и относительно рамы при поступательных движениях штока главного привода.
Кроме того, для Х-образного зажима по меньшей мере одна из осей вращения (жесткого рычага и привода на раме) может быть консольно закреплена на раме только одним из своих концов.
Независимо от того, является ли зажим С-образным или Х-образным, рама может представлять собой жесткое соединение деталей или, как вариант, может быть моноблочной.
На зажимах обоих типов кинематики С и Х раму можно использовать для позиционирования и крепления компонентов узла сочленения, в котором сама рама может являться составной частью в случае выполнения зажима без функции центровки или калибровки.
Кроме того, раму можно использовать для позиционирования и крепления других компонентов, не входящих в состав узла сочленения.
В предпочтительном с точки зрения модульности и простоты варианте рама может быть выполнена в виде боковины. В этом случае зажим может быть модульным с множеством компонентов и/или узлов, отличных от рамы и являющихся общими для разных зажимов из указанного комплекта.
Предпочтительно в этих различных вариантах выполнения рама является одинаковой для всех зажимов комплекта.
Предпочтительно зажимы предназначены для электродуговой сварки, при этом концы неподвижной и подвижной рук являются сварочными электродами, а в зажиме предпочтительно имеется встроенный сварочный трансформатор, тоже закрепленный на раме.
Объектом настоящего изобретения является также комплект зажимов для сжатия листов, который согласно изобретению содержит множество зажимов, из которых по меньшей мере один зажим является С-образным, а по меньшей мере один другой зажим является Х-образных, при этом все зажимы комплекта имеют подобные и предпочтительно идентичные по форме и внешнему виду рамы.
В частности, изобретение касается комплекта из описанных выше Х-образных и С-образных зажимов, рама которых имеет подобные конструкцию и расположение частей для нескольких разных моделей зажимов, отличающихся формой, внешним видом, размером, величиной зажимного усилия и/или кинематикой подвижной руки (зажим типа С или X), что обеспечивает единообразие при производстве и поставке рам.
Кроме того, в соответствии с изобретением рама является общей (с одинаковыми исходными составными частями) для всего комплекта сварочных зажимов, в который входят как с С-образные, так и Х-образные зажимы.
Конструкция, в которой используются подобные или предпочтительно идентичные рамы, имеет много преимуществ. Так, такая конструкция без каких-либо ограничений обеспечивает высокую совместимость и позволяет значительно упростить поставку, учет и складирование компонентов комплекта зажимов. Кроме того, изобретение позволят использовать многие другие общие компоненты для зажимов разного размера и обеспечивает значительную их модульность.
Эта конструкция позволяет также частично или полностью для рассматриваемого комплекта зажимов облегчить операции монтажа, организацию рабочих постов и использование общих сборочных инструментов, причем независимо от кинематики зажима (С или X).
Другие преимущества и особенности настоящего изобретения будут более понятны из нижеследующего описания не ограничивающих примеров его осуществления со ссылками на прилагаемые.
На фиг.1 схематично показан известный С-образный зажим, вид сбоку;
на фиг.2а и 2b схематично показаны два варианта выполнения известных X-образных зажимов, вид сбоку;
на фиг.3-11 показаны примеры выполнения зажимов в соответствии с настоящим изобретением, в том числе:
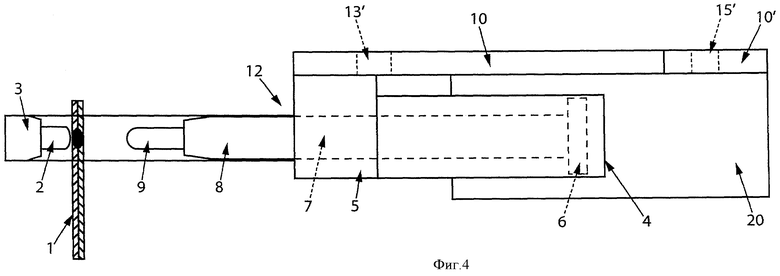
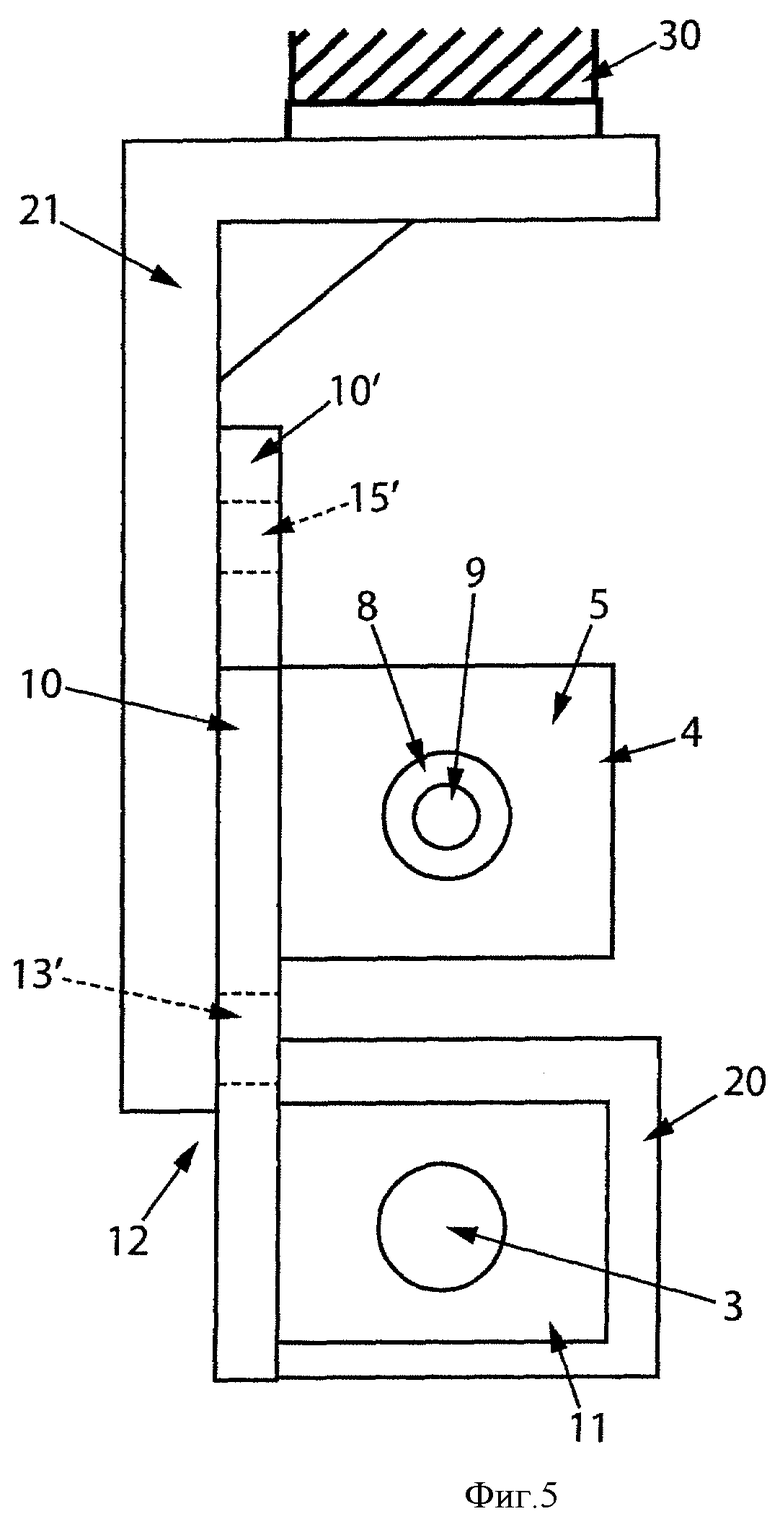
на фиг.3, 4 и 5 - схематично показана часть С-образного зажима из комплекта зажимов в соответствии с настоящим изобретением, виды сбоку, в плане и спереди, соответственно;
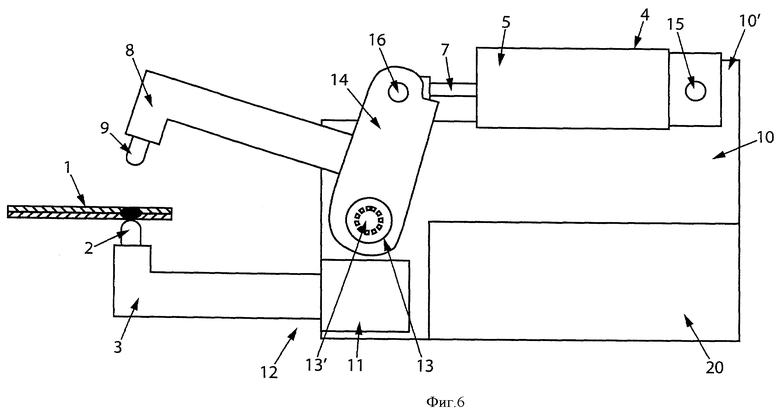
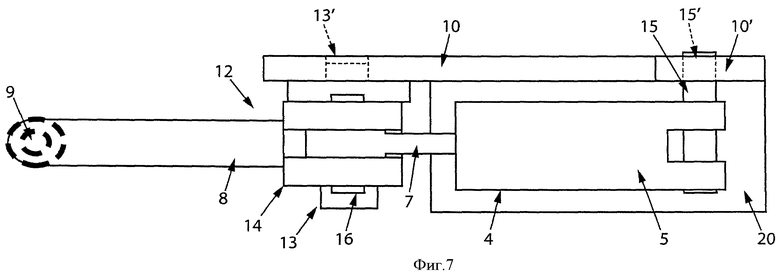
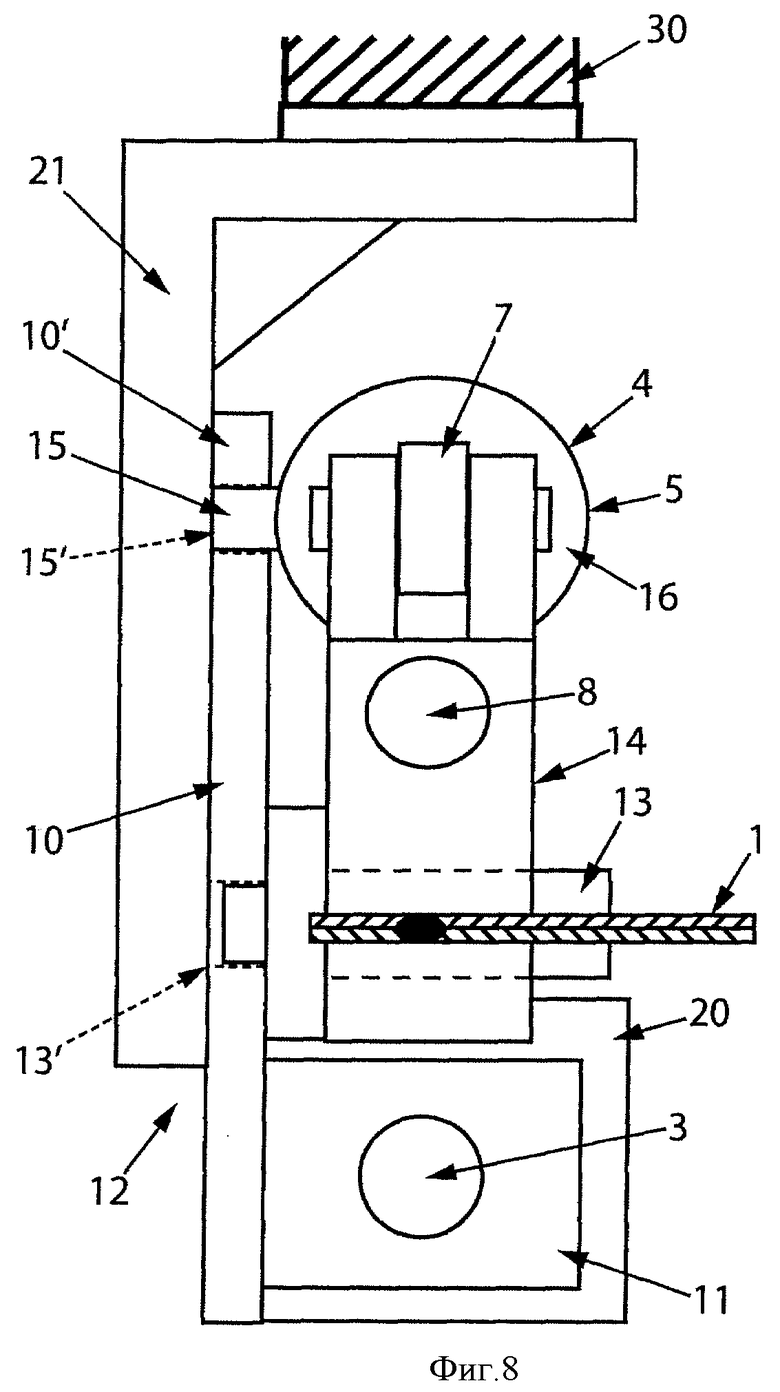
на фиг.6, 7 и 8 схематично показана часть Х-образного зажима, установленного на раме, подобной и предпочтительно идентичной раме для С-образного зажима, показанного на фиг.3, 4 и 5, и относящегося к тому же комплекту зажимов, виды сбоку, в плане и спереди, соответственно;
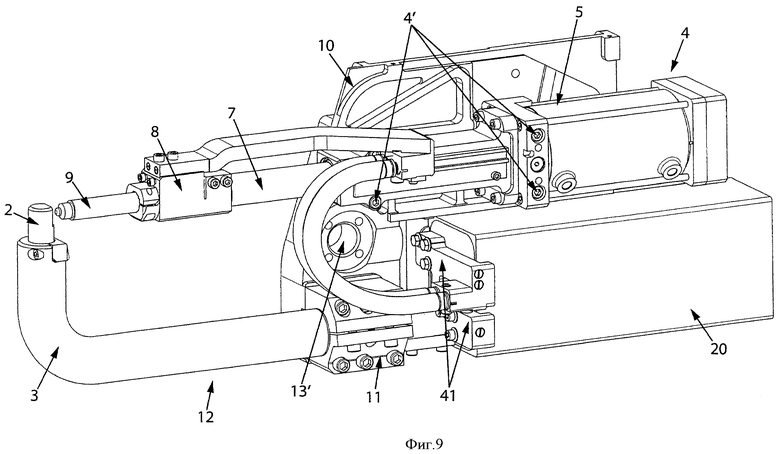
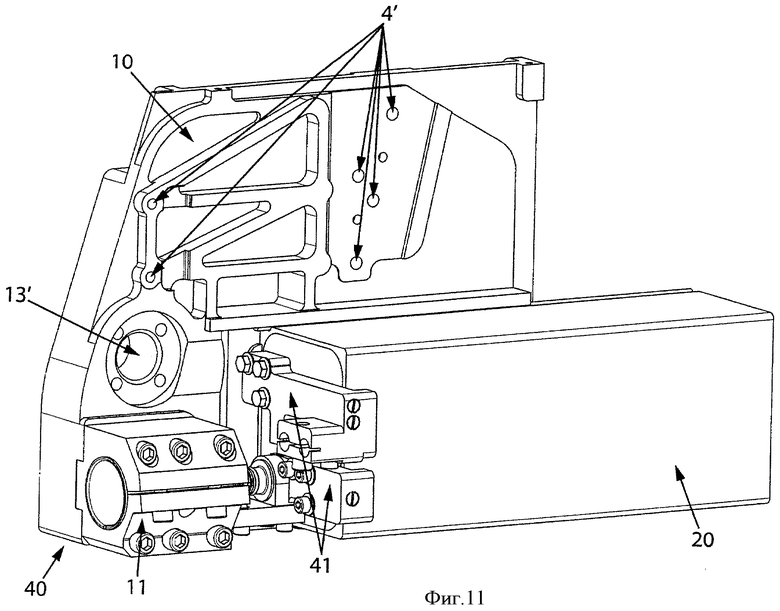
на фиг.9, 10 и 11 показаны пример выполнения зажимов с разной кинематикой (С и X), соответственно, на фиг.9 и 10, использующих раму и узел, показанные на фиг.11, идентичные и общие для всех зажимов комплекта, вид в перспективе.
Как показано на фиг.3, С-образный зажим, предназначенный для осуществления точечной электродуговой сварки набора листов 1, снабжен неподвижным концевым электродом 2, установленным на конце неподвижной руки 3. Неподвижная рука 3 посредством соединительной опоры 11 жестко соединена с рамой 10, выполненной в виде боковины. На раме 10 над опорой 11 консольно установлен корпус 5 сварочного привода 4, шток 7 которого неподвижно соединен с подвижной рукой 8, ориентированной в продолжение указанного штока 7. Шток 7 совместно с подвижной рукой 8, на свободном конце которой установлен подвижный электрод 9, имеет возможность перемещения, при этом рама 10 воспринимает усилия сжатия или сварки от зажима. Эти компоненты образуют узел 12, называемый сочленением, жестко связанный с несущим элементом 300, показанным на фиг.5.
На фиг.4 показан вид сверху на С-образный зажим, изображенный на фиг.3, при этом ясно видно консольное крепление корпуса 5 привода 4 на одной стороне рамы 10, а сварочного трансформатора 20 - под приводом 4 позади опоры 11.
На фиг.5 показан вид спереди на тот же С-образный зажим, изображенный на фиг.3 и 4, который содержит узел 12 сочленения, жестко соединенный с несущим элементом 30 при помощи уголкового кронштейна 21, закрепленного сбоку на раме 10 на стороне, противоположной стороне, на которой установлены опора 11, сварочный трансформатор 20 и привод 4.
На фиг.3, 4 и 5 показаны отверстия 13' и 15', выполненные в раме 10, соответственно, между опорой 11 и корпусом 5 привода 4 и в продолжении 10' в верхней задней части рамы 10. Эти отверстия необходимы для использования этой же рамы 10 для Х-образного зажима или зажимов из этого же комплекта зажимов, что будет описано ниже со ссылками на фиг.6, 7 и 8.
На фиг.6 показан сбоку Х-образный зажим, содержащий в этом примере неподвижный концевой электрод 2 на неподвижной руке 3, которые при помощи соединительной опоры 11 жестко соединены с рамой 10 (такой же, что и для зажима, показанного на фиг.3, 4 и 5). На раме 10 установлена ось 13 поворота (заходящая в отверстие 13'), вокруг которой может поворачиваться жесткий рычаг 14 с установленными на нем подвижной рукой 8 и подвижным электродом 9. При этом корпус 5 линейного сварочного привода 4 установлен на раме 10 с возможностью поворота вокруг оси 15, установленной в отверстии 15' на продолжения 10' и параллельной оси 13. Свободный конец штока 7 привода 4 приводит в движение рычаг 14, с которым шток 7 шарнирно связан с возможностью поворота вокруг оси 16, тоже параллельной оси 13. Это позволяет управлять поворотом подвижной руки 8 с концевым электродом 9 за счет поворота рычага 14 вокруг оси 13 относительно руки 3 с концевым электродом 2, неподвижными относительно рамы 10, воспринимающей усилия сварки и закрепленной на несущем элементе 30 (неподвижное основание или робот-манипулятор).
На фиг.7 и 8 сверху и спереди, соответственно, показан тот же Х-образный зажим, что и на фиг.6, при этом на фиг.8 показан узел 12 сочленения, жестко связанный с несущим элементом 30 при помощи жесткого уголкового кронштейна 21, закрепленного сбоку рамы 10 со стороны, противоположной стороне, на которой консольно установлены опора 11, сварочный трансформатор 20 и привод 4. Для этого эти поворотные оси 13 и 15 рычага 14 и корпуса 5 привода 4 на раме 10 Х-образного зажима установлены консольно на раме 10, как показано на фиг.7 и 8 (оси 13 и 15 удерживаются на раме 10 только одним из своих концов). Как вариант, оси 13 и 15 можно установить двумя концами на U-образной раме, которую также можно использовать для установки узла 12 сочленения С-образного зажима, показанного на фиг.3, 4 и 5, из другого комплекта зажимов в соответствии с настоящим изобретением.
Возможность выполнения рамы 10 общей для С-образных и Х-образных зажимов, показанных на фиг.3, 4, 5 и 6, 7, 8, соответственно, обусловлено наличием на раме 10 С-образного зажима, показанного на фиг.3, отверстий 13' и 15', позволяющих устанавливать поворотные оси 13 и 15 для Х-образного зажима, показанного на фиг.6, 7 и 8.
На фиг.9, 10 и 11 показан другой пример модульной конструкции зажима для электродуговой сварки, в котором на основе общей идентичной или подобной рамы (фиг.11) представлены различные компоненты, общие для двух разных типов зажимов (X-образного зажима на фиг.10 и С-образного зажим на фиг.9).
На фиг.9 в изометрии показан С-образный сварочный зажим с неподвижным концевым электродом 2, установленным на конце неподвижной руки 3, которая через соединительную опору 11 жестко соединена с рамой 10 в виде боковины, со сварочным приводом 4, тоже жестко соединенным с рамой 10 посредством средств 4' крепления, таких как винты. Шток 7 привода 4 неподвижно соединен с подвижной рукой 8, ориентированной в продолжение указанного штока. Шток 7 имеет возможность перемещения, а на свободном конце руки 8 установлен подвижный электрод 9. Эти компоненты образуют узел 12 сочленения, который жестко связан с несущим элементом 30, как показано на фиг.5. Как и опора 11, привод 5 и сварочный трансформатор 20 консольно закреплены винтами или болтами на боковой стороне боковины, образующей раму 10, которая воспринимает усилия сжатия или сварки от зажима.
На фиг.10 схематично показан Х-образный зажим, содержащий в этом примере выполнения сварочный электрод на неподвижном конце 2 неподвижной руки 3, которая через такую же соединительную опору 11 соединена с такой же рамой 10, как и в случае, показанном на фиг.9. В этой раме 10 установлена поворотная ось 13 (входящая в отверстие 13', выполненное в раме 10, см. фиг.9), вокруг которой поворачивается жесткий рычаг 14 с установленной на нем подвижной рукой 8 с подвижным концевым электродом 9. При этом корпус 5 линейного сварочного привода 4 жестко закреплен посредством средств 4' крепления, таких как винты, на боковой стороне рамы 10. Соответствующее механическое соединение штока 7 привода 4 и плеча рычага 14 с двумя степенями свободы выполнено, например, в виде стержневой системы, описанной со ссылками на фиг.2b. Стержневая система установлена с возможностью поворота вокруг первой оси 19, параллельной оси 13, на свободном конце штока 7 и вокруг второй оси 16, тоже параллельной оси 13, на плече рычага 14, что позволяет управлять поворотом подвижной руки 8 с концевым электродом 9 за счет поворота рычага 14 вокруг оси 13 относительно руки 3 с концевым электродом 2, неподвижных по отношению к раме 10 инструмента, при поступательных движениях штока 7 сварочного привода 4.
Показанные на фиг.9 и 10 зажимы могут быть закреплены на несущем элементе через раму 10 или через сварочный трансформатор 20.
На фиг.11 в изометрии показана общая рама 10, а также на основе этой рамы представлены модульность, упрощения и возможность совместной работы зажимов с разной кинематикой, при этом видны другие детали или узлы 40, общие для моделей различных типов зажимов (С-образных и Х-образных, показанных на фиг.9 и 10) из одного комплекта.
Так, кроме сварочного трансформатора 20 видны в качестве общих деталей соединительная опора 11 неподвижной руки (не показана), а также другие детали, такие как проводники 41, соединенные с трансформатором 20 и обеспечивающие электрическое соединение между контактами вторичной обмотки указанного трансформатора и сварочными электродами 2 и 9, как описано в заявке FR 0602073, поданной компанией ARO.
Поскольку рама 10 является общей, облегчается также стандартизация кронштейнов 21 или других механических компонентов, которые могут участвовать в соединении между инструментом и его несущим элементом 30.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНЫЕ СВАРОЧНЫЕ КЛЕЩИ ДЛЯ КОНТАКТНОЙ СВАРКИ | 2010 |
|
RU2538447C2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| УСТРОЙСТВО ДЛЯ ТОЧЕЧНОЙ СВАРКИ КОНСТРУКЦИЙ ИЗ ШТАМПОВАННЫХ ЭЛЕМЕНТОВ ИЗ ЛИСТОВОГО МЕТАЛЛА | 1994 |
|
RU2090331C1 |
| УСТАНОВКА СВАРОЧНАЯ ОПЛАВЛЕНИЕМ | 2007 |
|
RU2323074C1 |
| СВАРОЧНЫЙ КОМПЛЕКТ | 2007 |
|
RU2348495C1 |
| ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ ПРИЕМА КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ И ИХ ЗАЖИМА | 2007 |
|
RU2414338C2 |
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ РАБОЧЕГО КОНЦА СВАРОЧНОГО ЭЛЕКТРОДА | 2014 |
|
RU2605728C2 |
| РОБОТИЧЕСКАЯ СИСТЕМА ДЛЯ МИНИ-ИНВАЗИВНОЙ ХИРУРГИИ | 2012 |
|
RU2491161C1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| МНОГОКООРДИНАТНЫЙ ПРОМЫШЛЕННЫЙ РОБОТ С ИНТЕГРИРУЕМЫМ ИНСТРУМЕНТОМ | 2013 |
|
RU2603938C2 |
Изобретение относится к зажимам для сжатия листов, используемым в сочетании с манипулятором робота. Зажим содержит жесткую раму, связанную с несущим элементом, таким как жесткое основание или указанный робот, узел сочленения, содержащий неподвижную руку, подвижную руку и главный привод, опирающийся на указанную раму, на которой расположена упомянутая неподвижная рука. Причем указанный привод выполнен с возможностью обеспечения перемещения подвижной руки относительно неподвижной руки с одной степенью свободы поступательно или вращательно для смыкания или размыкания зажима, чтобы удерживать набор листов между неподвижной и подвижной руками или освобождать этот набор листов, соответственно. Зажим входит в комплект зажимов, содержащий зажимы с С-образной и Х-образной кинематикой, а рама является идентичной для всех зажимов из указанного комплекта зажимов. Изобретение обеспечивает высокую совместимость и модульность, позволяет облегчить операции монтажа, использование общих сборочных инструментов независимо от кинематики зажима. 2 н. и 17 з.п. ф-лы, 12 ил.
1. Зажим для сжатия листов, используемый в сочетании с манипулятором робота и содержащий жесткую раму (10), связанную с несущим элементом (30), представляющим собой жесткое основание или указанный робот, узел (12) сочленения, включающий в себя неподвижную первую руку (3), подвижную вторую руку (8) и главный привод (4), опирающийся на указанную раму (10), на которой расположена упомянутая неподвижная рука (3), причем указанный привод выполнен с возможностью обеспечения перемещения подвижной руки (8) относительно неподвижной руки (3) с одной степенью свободы поступательно или вращательно для смыкания или размыкания зажима, чтобы удерживать набор листов (1) между неподвижной (3) и подвижной (8) руками или освобождать этот набор листов (1), соответственно, отличающийся тем, что зажим входит в комплект зажимов, содержащий зажимы с С-образной и X-образной кинематикой, а рама является идентичной для всех зажимов из указанного комплекта.
2. Зажим по п.1, отличающийся тем, что рама (10) является средством крепления кронштейна (21) или любого другого компонента или механического соединения компонентов (20), обеспечивающих жесткое соединение указанной рамы (10) с несущим элементом (30), представляющим собой манипулятор или жесткое неподвижное основание.
3. Зажим по п.1 или 2, отличающийся тем, что он выполнен в виде X-образного зажима, в котором поворот жесткого рычага (14) с установленной на нем подвижной рукой (8) и ее подвижным концом (9) вокруг оси (13) поворота управляется линейным главным приводом (4), корпус (5) которого установлен на раме (10) с возможностью поворота вокруг оси (15), параллельной оси (13) поворота рычага (14), а свободный конец штока (7) привода (4) шарнирно связан с рычагом (14) с возможностью поворота вокруг другой оси (16), тоже параллельной оси (13) поворота рычага (14) и связанной с плечом рычага (14) так, что обеспечивается возможность управления поворотом подвижной руки (8) и ее конца (9) вокруг оси (13) поворота рычага относительно неподвижной руки (3) и ее конца (2) и относительно рамы (10) Х-образного зажима.
4. Зажим по п.1 или 2, отличающийся тем, что он выполнен в виде X-образного зажима, в котором поворот жесткого рычага (14) с установленной на нем подвижной рукой (8) и ее подвижным концом (9) вокруг оси (13) поворота управляется линейным главным приводом (4), корпус (5) которого жестко закреплен посредством средств (4') крепления, таких как винты, на раме (10), при этом шток (7) связан с плечом рычага (14) посредством механического соединения (17) с двумя степенями свободы, такого как стержневая система (18), в которой стержень шарнирно связан со свободном концом штока (7) с возможностью поворота вокруг первой оси (19), параллельной оси (13) поворота рычага (14), и с плечом рычага (14) с возможностью поворота вокруг второй оси (16), тоже параллельной оси (13) поворота рычага (14), так, что обеспечивается возможность управления поворотом подвижной руки (8) и ее конца (9) вокруг оси (13) поворота рычага (14) относительно неподвижной руки (3) и ее конца (2) и относительно рамы (10) зажима при поступательных движениях штока (7) главного привода (4).
5. Зажим по п.3, отличающийся тем, что по меньшей мере одна из осей (13, 15) поворота Х-образного зажима консольно закреплена на раме (10) одним из своих концов.
6. Зажим по п.4, отличающийся тем, что по меньшей мере одна из осей (13, 15) поворота Х-образного зажима консольно закреплена на раме (10) одним из своих концов.
7. Зажим по любому из пп.1, 2, 5, 6, отличающийся тем, что рама (10) выполнена в виде жесткого соединения деталей.
8. Зажим по п.3, отличающийся тем, что рама (10) выполнена в виде жесткого соединения деталей.
9. Зажим по п.4, отличающийся тем, что рама (10) выполнена в виде жесткого соединения деталей.
10. Зажим по любому из пп.1, 2, 5, 6, отличающийся тем, что рама (10) выполнена моноблочной.
11. Зажим по п.3, отличающийся тем, что рама (10) выполнена моноблочной.
12. Зажим по п.4, отличающийся тем, что рама (10) выполнена моноблочной.
13. Зажим по п.1, отличающийся тем, что компоненты узла (12) сочленения, установлены и закреплены на раме (10).
14. Зажим по п.1, отличающийся тем, что компоненты, не входящие в состав узла (12) сочленения установлены и закреплены на раме (10).
15. Зажим по п.1, отличающийся тем, что рама (10) выполнена в виде боковины.
16. Зажим по п.1, отличающийся тем, что он является модульным с множеством отличных от рамы (10) компонентов и/или узлов (40), которые являются общими для С-образных и Х-образных зажимов.
17. Зажим по п.1, отличающийся тем, что он представляет собой зажим для электродуговой сварки, и концы неподвижной руки (3) и подвижной руки (8) являются сварочными электродами (2, 9), соответственно, при этом зажим предпочтительно содержит встроенный сварочный трансформатор (20), закрепленный на раме (10).
18. Зажим по п.1, отличающийся тем, что рама (10) является рамой для С-образного зажима и содержит отверстия (13', 15'), выполненные с возможностью установки поворотных осей (13, 15) для установки Х-образного зажима.
19. Комплект зажимов для сжатия листов, отличающийся тем, что он содержит множество зажимов по любому из пп.1-18, из которых по меньшей мере один является С-образным зажимом, а по меньшей мере один другой зажим является Х-образным зажимом, при этом все зажимы комплекта имеют идентичные по форме и внешнему виду рамы (10).
| DE 19801652 A1, 22.07.1999 | |||
| US 4551903 A, 12.11.1985 | |||
| US 5750953 A, 12.05.1998 | |||
| Зажимная головка-манипулятор | 1981 |
|
SU996040A1 |

