Изобретение относится к робототехнике и может быть использовано в промышленных роботах различного назначения, манипуляторы которых включают шарнирно сочлененные звенья
Целью изобретения является повышение точности позиционирования путем уменьшения люфтов в кинематической цепи и упрощения управления.
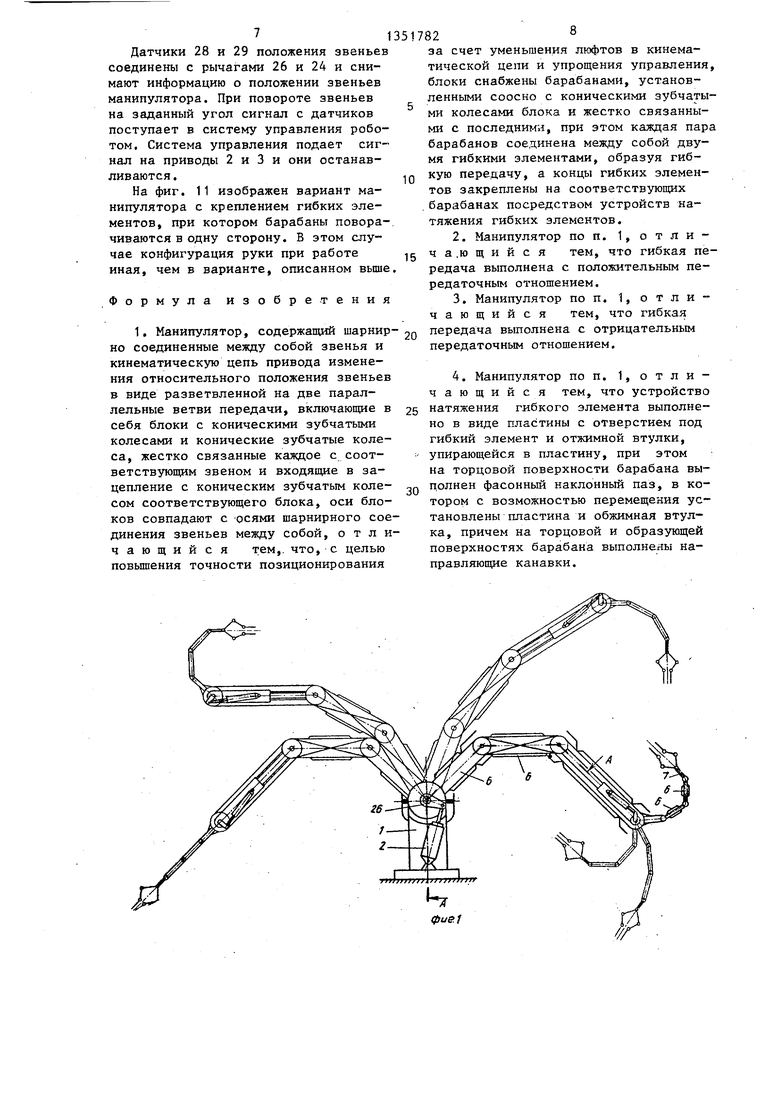
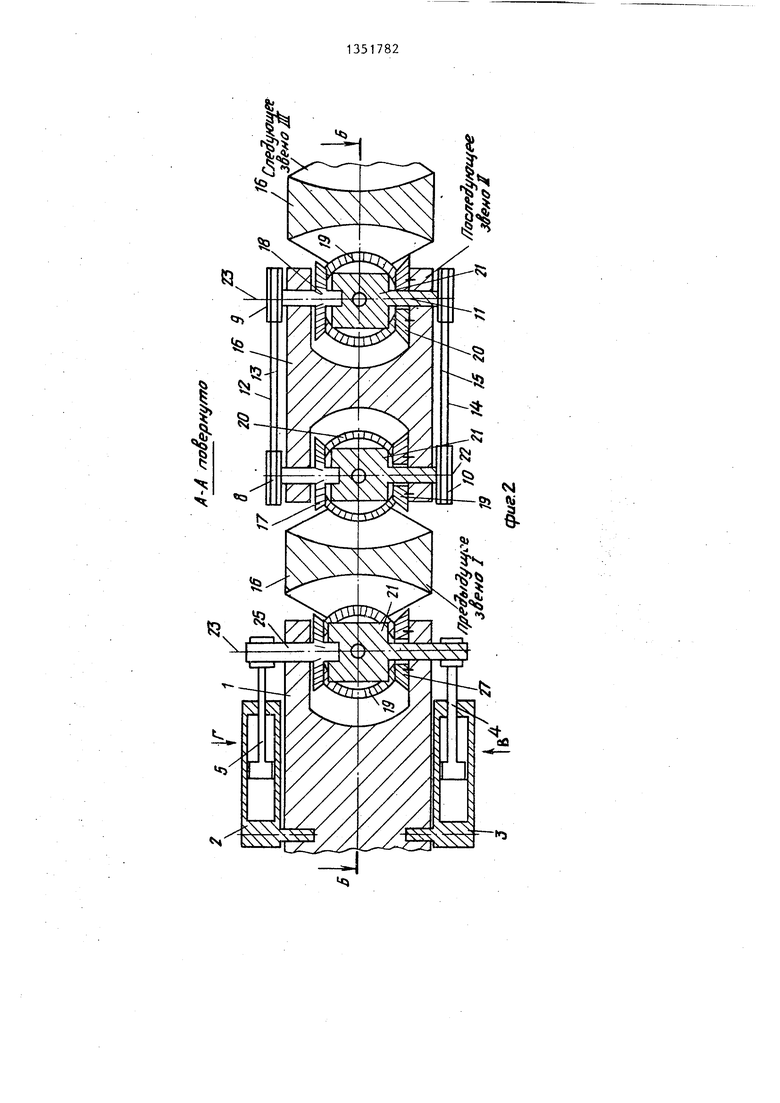
На фиг. 1 изображен манипулятор, общий ВИД} на фиг. 2 - разрез А-А на фиг. I , на фиг. 3 - разрез Б-В на фиг.2; на фиг. 4 - вид Г на фиг.2 на фиг. 5 - вид В на фиг. 2j на
подвижно закреплены конические зубчатые колеса 19 и 20.
Каждое звено снабжено крестовиной 21 с осями 22, 23. Ось 22 крес- 5 товины 21 своими концами связана с осями барабанов 8 и 10, причем с ба .рабаном 10 - жестко, а с барабаном 8- с возможностью вращения. Концы оси 23 крестовины первого звена (фиг.2) fO соединены со штоками 4 и 5 гидроцилиндров, причем первый шток 4 соеди нен с концом оси 23 крестовины непо средственно через рычаг 24. Рычаг 2 закреплен на крестовине жестко, а
фиг.6 - взаимное положение двух уни- 5 на штоке - шарнирно (фиг.2, 5). На
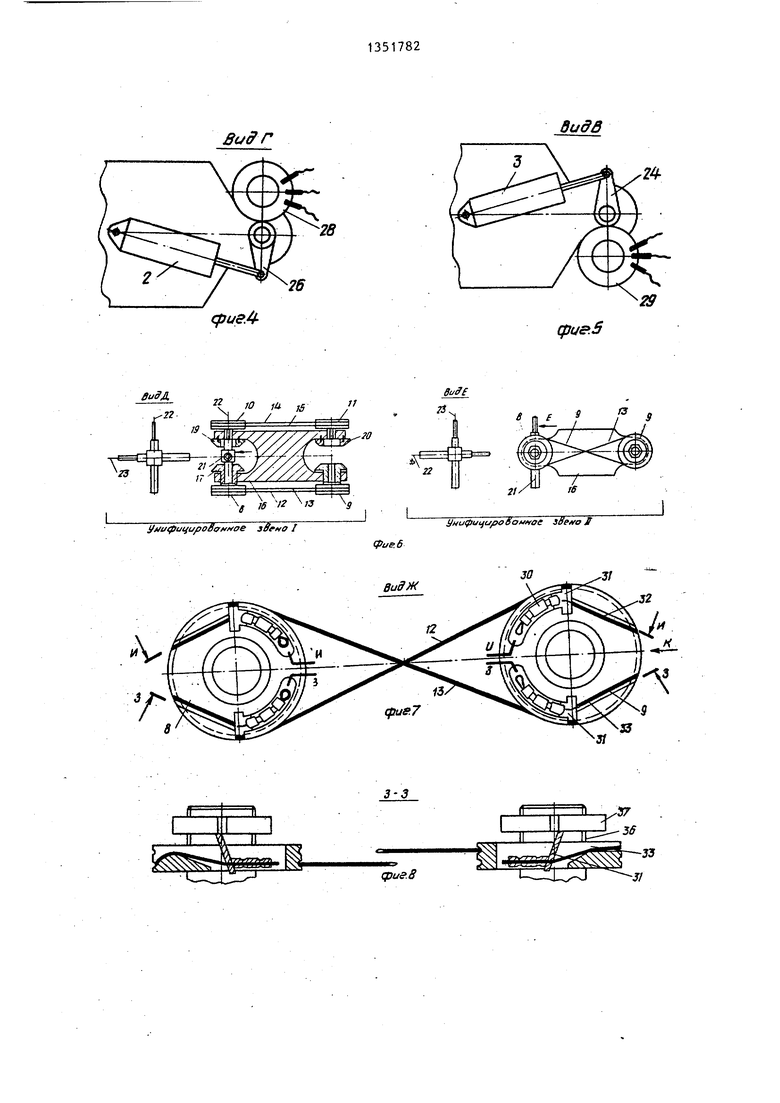
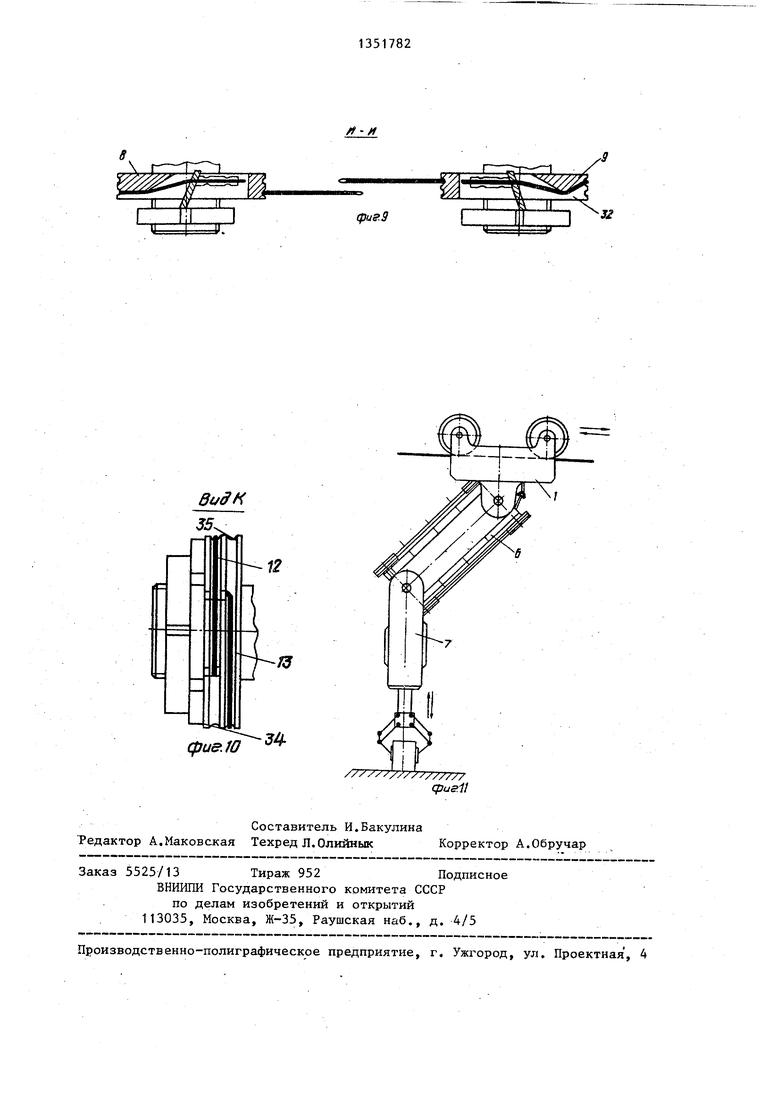
фицированных звеньев; на фиг.7 - вид Ж на фиг. 3; на фиг. 8 - разрез 3-3 на фиг.7; на фиг. 9 - разрез И-И на фиг.7; на фиг. 10 - вид К на. фиг. 7; на фиг.- 11 - вариант исполнения манипулятора.
Манипулятор содержит основание 1, на котором установлены гидроцилиндры приводов 2 и 3 со штоками 4,5, и исполнительный орган, состояш;ий из шарнирно сочлененных унифицированных звеньев 6 и кисти, также составленной из унифицированных звеньев того же или другого типоразмера с захватом 7. Кисть закреплена на звене с продольным перемещением.
Каждое звено 6 содержит две ветви кинематической передачи, составленные из двух барабанов 8 и 9 (10 и 11), взаимно соединенных посредством гибких элементов (тросов) 12 и 13, 14 и 15 и образующих гибкие передачи. Каждый конец гибкого элемента жестко закреплен в ус рройстве натяжения гибкого элемента,, расположенном на барабане. Если элементы закреплены крест-накрест (фиг. 7), то барабаны вращаются в разные стороны.
втором конце оси 23 установлено ко ническое зубчатое колесо 25, ось которого соединена со штоком 5 через рычаг 26. Рычаг 26 соединен со
0 штоком шарнирно, а с осью коническо го зубчатого колеса - жестко (фиг.2 4). Коническое зубчатое колесо 25 связано зацеплением с неподвижным коническим зубчатым колесом 19. Кон
5 ческое зубчатое колесо 17 соединено с коническим зубчатым колесом 27, установленным соосно с осью 23 крес товины, и неподвижно закреплено на основа нии 1 ,
30 Звенья сочленены между собой с разворотом относительно продольной оси Б-Б на 90 . Крестовина 21 после дующего звена соединена с предьщущи звеном таким образом, что ее сво35 бодная orib 23 соосна осям барабанов 9 и 11 предыдущего звена, причем с барабаном 11 - неподвижно, а с барабаном 9 - с возможностью вращения Подвижное коническое колесо 17 по4Q следующего звена зацеплено с неподвижным коническим колесом 20 предыдущего звена. Подвижное коническое колесо tS предь щущего звена зацепле но с первым неподвижным коническим
т.е. гибкая передача выполнена с от- 45 колесом 19 последующего звена.
рицательным передаточным отношением, если элементы закреплены параллельно (фиг. 11), то барабаны вращаются в одну сторону, т.е. гибкая передача выполнена с положительным передаточным отношением.
СооСно барабанам 8 и 9 первой кинематической передачи на корпусе 16 установлены с возможностью вращения конические зубчатые колеса 17 и 18, жестко соединенные с барабанами 8 и 9 и образующие с ними блоки. Соосно барабанам 10 и 11 второй кинематической передачи на корпусе 16 не
1782 -1
подвижно закреплены конические зубчатые колеса 19 и 20.
Каждое звено снабжено крестовиной 21 с осями 22, 23. Ось 22 крес- 5 товины 21 своими концами связана с осями барабанов 8 и 10, причем с ба- .рабаном 10 - жестко, а с барабаном 8- с возможностью вращения. Концы оси 23 крестовины первого звена (фиг.2) fO соединены со штоками 4 и 5 гидроцилиндров, причем первый шток 4 соединен с концом оси 23 крестовины непосредственно через рычаг 24. Рычаг 24 закреплен на крестовине жестко, а
на штоке - шарнирно (фиг.2, 5). На
втором конце оси 23 установлено ко- ническое зубчатое колесо 25, ось которого соединена со штоком 5 через рычаг 26. Рычаг 26 соединен со
штоком шарнирно, а с осью конического зубчатого колеса - жестко (фиг.2, 4). Коническое зубчатое колесо 25 связано зацеплением с неподвижным коническим зубчатым колесом 19. Коническое зубчатое колесо 17 соединено с коническим зубчатым колесом 27, установленным соосно с осью 23 крестовины, и неподвижно закреплено на основа нии 1 ,
Звенья сочленены между собой с разворотом относительно продольной оси Б-Б на 90 . Крестовина 21 последующего звена соединена с предьщущим звеном таким образом, что ее свободная orib 23 соосна осям барабанов 9 и 11 предыдущего звена, причем с барабаном 11 - неподвижно, а с барабаном 9 - с возможностью вращения. Подвижное коническое колесо 17 последующего звена зацеплено с неподвижным коническим колесом 20 предыдущего звена. Подвижное коническое колесо tS предь щущего звена зацеплено с первым неподвижным коническим
Последующие звенья соединены аналогично (фиг. 6).
Датчики 28, 29 положения звеньев установлены на основании 1 и соедине- 50 ны с рьтагами 24 и 26.
Устройство натяжения гибкого элемента (троса) показано на фиг.7-10, Устройство расположено на торцовых поверхностях барабанов 8-11 и содер- 55 жит две обжимные (стопорные)- втулки . 30. Втулки своими торцами упираются в пластины 31 с отверстием под гибкий элемент. Пластины вставлены в фасонные наклонные пазы, выполненные на
.- 1
торцах барабана. На торцах барабана имеются также направляющие канавки 32, 33, а на наружной цилиндрической поверхности барабана - две направляю щие канавки 34, 35, служащие для направления гибких элементов.
На торце барабана со стороны наклонных пазов имеется выступ с резьбой 36, на которую.навернута гайка 37 (фиг. 8), упирающаяся в пластины 31.
Гибкий элемент 13 проходит через отверстие пластины 31 барабана 9 по направляющей канавке 32 и выходит в канавку 35, затем проходит часть окружности (по часовой стрелке, фиг.7) в канавке 35 и переходит на другой барабан 8.
Гибкий элемент 12 проходит через отверстие в другой пластине 31 барабана 9, направляющую канавку 33 и выходит в направляющую канавку 34, затем проходит часть окружности (против часовой стрелки, фиг. 7) в канавке 34 и переходит на другой барабан 8.
На барабане 8 концы гибких элементов 12 и 13 монтируются так же, как и в барабане 9 (в зеркальном отражении).. Барабаны 8 и 9 строго сор1 ентированы друг относительно друга. Это необходимо для соблюдения точности кинематики манипулятора, которая, в свою очередь, обеспечивает высокую точность работы манипулятора при математическом способе программирования робота.
Строгая ориентация барабанов достигается тем, что гибкие элементы предварительно (до сборки) растянуты под нагрузкой, а торцы стопорных втулок, которыми они упираются в пластины 31, подрезаны так, что гибкие элементы имеют требуемую длину.
Манипулятор работает следующим образом.
Посредством гибких элементов фиксируется взаимное положение барабанов. Для этого гайку 37 вручную заворачивают и перемещают вниз. Своим торцом гайка нажимает на пластины 31, которые перемещаются в фасонных наклонных пазах барабана и, упираясь в торцы втулок 30, натягивают гибкие элементы 12 и 13 одновременно на одинаковую величину. При этом барабаны сохраняют свою ориентацию. Манипулятор готов к работе.
10
20
517824
При повороте звеньев в заданное положение, например в плоскости чертежа - вверх (фиг. 2), в гидроцилиндр 2 подается рабочая жидкость под давлением. Шток 5 гидроцилиндра вьщвигается и поворачивает рычаг 26 и коническое колесо 25 по часовой стрелке (если смотреть по стрелке В), так как они жестко соединены. Коническое колесо 25 поворачивает коническое колесо 19 против часовой стрелки. Поскольку коническое колесо 19.жестко соединено с корпусом 16
.g предыдущего звена 1 то оно поворачивается относительно основания 1 вокруг оси 22 вверх. При повороте звена движение через гибкие элемен ты 13 и 14 передается на барабан 11, так как барабан 10 соединен с крестовиной 21 и остается неподвижным относительно основания 1. Барабан 11 поворачивается против часовой стрелки. Барабан 11 жестко соединен с
25 крестовиной 21 последующего звена, поэтому крестовина 21 этого звена поворачивается относительно предыдущего звена против часовой стрелки. Крестовина 21 поворачивает указанное
3Q звено относительно предыдущего звена вверх вокруг оси 23. Если передаточное число на барабанах равно единице, то последующее звено повернется вверх относительно предыдущего звена на тот же угол, что и предыдущее (пер- вое) звено относительно основания 1. Таким образом, второе звено манипулятора повернется относительно основания 1 на двойной угол. При повороте второго звена относительно первого вверх коническое колесо 17 второго звена, находящееся в зацеплении с коническим колесом 20 первого звена, начинает поворачиваться (обкатьшать-
4g ся по коническому колесу 20) против часовой стрелки благодаря тому, что коническое колесо 20 неподвижно соединено с первым звеном. Соответственно, поворачивается против часовой
gQ стрелки и барабан 8 второго звена, который жестко соединен с коническим колесом 17.
Далее движение передается через гибкие элементы 12 и 13 второго звена на барабан 9. Барабан 9 второго
40
55
звена вместе с коническим колесом 18 (они жестко соединены) поворачивается по часовой стрелке относительно этого звена вокруг оси 23. Коническое колесо 18 этого звена находится в зацеплении с коническим колесом 19 следующего, третьего, звен и поворачивает его против часовой стрелки, так как коническое колесо 19 жестко соединено с третьим звено то это звено поворачивается относительно второго звена вверх вокруг оси 22. Если передаточное число на барабанах равно единице, то третье звено повернется вверх относительно второго звена на тот же угол, что и второе звено относительно первого Таким образом, третье звено повар- нется относительно основания 1 на тройной угол. На следующие звенья движение передается аналогично. Таким образом, если манипулятор (рука робота) составлена из п подвижных звеньев, то последнее звено повернется относительно неподвижного звена на угол otn, где oi - угол поворот первого подвижного звена относительно неподвижного.
Поворот звеньев в заданное положение (в плоскости чертежа - вниз) осуществляется аналогичноj, меняется только направление вращения.
При повороте звеньев в заданное (Положение в imocKOCTHj перпендикулярной плоскости чертежа (вверх),манипулятор работает следующим образом
В гидроцилиндр 3 подается рабочая жидкость под давлением, шток 4 гид- роцилиндра втягивается и поворачивает рычаг 24 и крестовину 21 звена I против часовой стрелки (если смотреть по стрелке В), так как они жестко соединены. Крестовина 21 повора- чивает звено I относительно основания 1 вокруг оси 23 вверх в плоскости, перпендикулярной плоскости чертежа. Так как звено I поворачивается относительно основания 1 вокруг оси 23, то коническое колесо 17 звена I поворачивается (обкатывается) относительно звена I против часовой стрелки благодаря тому, что коническое колесо 17 находится в зацеплении с коническим колесом 27, которое неподвижно, закреплено на основании 1.
Барабан 8 звена I также поворачивается против часовой стрелки, так как барабан 8 жестко соединен с коническим колесом 17.
Движение через гибкие элементы 12 и 13 звена I передается на барабан
- о 5 Q 5
о
0
g
5
O
9, который вместе с коническим колесом 18 поворачивается по часовой стрелке (барабан 9 и коническое колесо 18 соединены жестко). Коническое колесо 18 звена I находится в зацеплении с коническим колесом 19 звена II и поворачивает его против часовой стрелки (по стрелке В). Так как зубчатое колесо 19 неподвижно соединено со звеном II, то звено II поворачивается относительно звена I вокруг оси 22 вверх в плоскости,перпендикулярной млйскости чертежа (фиг. 2). Если передаточное число равно единице, то последующее звено повернется относительно предьщущего звена на тот же угол, что и предыдущее звено повернулось относительно основания 1. Таким образом, звено II повернется относительно основания 1 на двойной угол. Так как звено II поворачивается относительно звена I вокруг оси 22 вверх, то движение через гибкие элементы 14 и 15 звена II передается на барабан 11, так как барабан 10 жестко соединен с крестовиной 21 и остается неподвижным относительно звена I. Барабан 11 вместе с крестовиной 21 звена III (барабан 11 и крестовина 21 соединены жестко) поворачивается против часовой стрелки. Крестовина 21 звена III поворачивает звено III относительно звена II вверх вокруг оси 23 в плоскости, перпендикулярной плоскости чертежа .
Если передаточное число равно единице, то третье звено повернется вверх относительно второго звена на тот же угол, что и второе звено повернулось относительно первого звена. Таким образом, третье звено повернется относительно основания 1 на тройной угол. На следующие звенья движение передается аналогично.
Поворот звеньев в заданное положение в плоскости, перпендикулярной плоскости чертежа, осуществляется аналогично, меняется только направление вращения.
При необходимости поворота последнего звена в плоскости, размещенной к плоскости чертежа под углом, не равным 90 , штоки приводов 2 и 3 вьщвигаются или втягиваются одновременно. При этом подвижные звенья одновременно поворачиваются вокруг своих шарнирных осей 22 и 23.
1
Датчики 28 и 29 положения звеньев соединены с рычагами 26 и 24 и снимают информацию о положении звеньев манипулятора. При повороте звеньев на заданный угол сигнал с датчиков поступает в систему управления роботом. Система управления подает сигнал на приводы 2 и 3 и они останавливаются.
На фиг. 11 изображен вариант манипулятора с креплением гибких элементов, при котором барабаны поворачиваются в одну сторону. В этом случае конфигурация руки при работе иная, чем в варианте, описанном выше
Формула изобретения
1, Манипулятор, содержащий шарнир но соединенные между собой звенья и кинематическую цепь привода изменения относительного положения звеньев в виде разветвленной на две параллельные ветви передачи, включающие в себя блоки с коническими зубчатыми колесами и конические зубчатые колеса, жестко связанные каждое с соответствующим звеном и входящие в зацепление с коническим зубчатым колесом соответствующего блока, оси блоков совпадают с осями шарнирного соединения звеньев между собой, отличающийся тем,, что, с целью повьшения точности позиционирования
5
1
n
5
0
782в
за счет уменьшения люфтов в кинематической цепи и упрощения управления, блоки снабжены барабанами, установленными соосно с коническими зубчатыми колесами блока и жестко связанными с последними, при этом каждая пара барабанов соединена между собой двумя гибкими элементами, образуя гибкую передачу, а концы гибких элементов закреплены на соответствующих барабанах посредством устройств натяжения гибких элементов.
2.Манипулятор по п. 1, отли- ча.ющийся тем, что гибкая передача выполнена с положительным передаточным отношением.
3.Манипулятор по п. 1, отличающийся тем, что гибкая передача выполнена с отрицательным передаточным отношением.
4.Манипулятор по п. 1, отличающийся тем, что устройство натяжения гибкого элемента выполнено в виде пластины с отверстием под гибкий элемент и отжимной втулки, упирающейся в пластину, при этом
на торцовой поверхности барабана выполнен фасонный наклонный паз, в котором с возможностью перемещения установлены пластина и обжимная втулка, причем на торцовой и образующей поверхностях барабана выполнены направляющие канавки.
%
l
1
Buff Г
26
gjueA
дидд
2
(fJu&S
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1273243A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Механизм уравновешивания промышленного робота | 1987 |
|
SU1445947A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Устройство для подвода питания к подвижному потребителю | 1984 |
|
SU1251222A1 |
| Пробоотборник | 1989 |
|
SU1727023A2 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| УСТРОЙСТВО ДЛЯ НАРЕЗАНИЯ ВИНТОВЫХ ПОВЕРХНОСТЕЙ ПЕРЕМЕННОГО ШАГА И ПОСТОЯННОЙ ГЛУБИНЫ | 1998 |
|
RU2144447C1 |
Изобретение относится к робототехнике и может быть использовано в промьшленных роботах различного назначения, манипуляторы которых включают шарнирно сочлененные звенья. Целью изобретения является повышение точности йозиционирования за счет уменьшения люфтов в кинематической цепи и упрощения управления. Для этого манипулятор содержит шарнирно соединенные между собой звенья и кинематическую цепь изменения относительного положения звеньев в виде разветвленной на две параллельные ветви передачи. Каждое звено содержит две ветви кинематической передачи, составленные из двух взаимно соединен19 10 тт ных барабанов 8 и 9, 10 и 11. Барабаны соединены гибкими элементами 12, 13, 14 и 15, образуя гибкие передачи. Каждый конец гибкого элемента жестко закреплен в устройстве натяжения гибкого элемента, расположенном на каждом барабане. Соосно барабанам 8 и 9 первой кинематической передачи установлены с возможностью вращения конические колеса 17 и 18, жестко соединенные с барабанами 8 и 9 и образующие с ними блоки. Соосно барабанам 10 и 11 второй кинематической передачи неподвижно закреплены конические колеса 19 и 20. Устройство натяжения гибких элементов выполнено в виде двух стопорных втулок, в которые вставлены конць гибких элементов. Втулки упираю тся своими торцами в пластины. Пластины установлены в наклонные пазы, вылолненные на торцах барабанов. На наружной цилин- дрической образующей поверхности барабанов выполнены направляющие канав- кн для направления гибких элементов. 3 з.п. ф-лы, 11 ил. ;, 2 W 22 с & СО О1 |.шЛ 00 ГО го (fkfS.S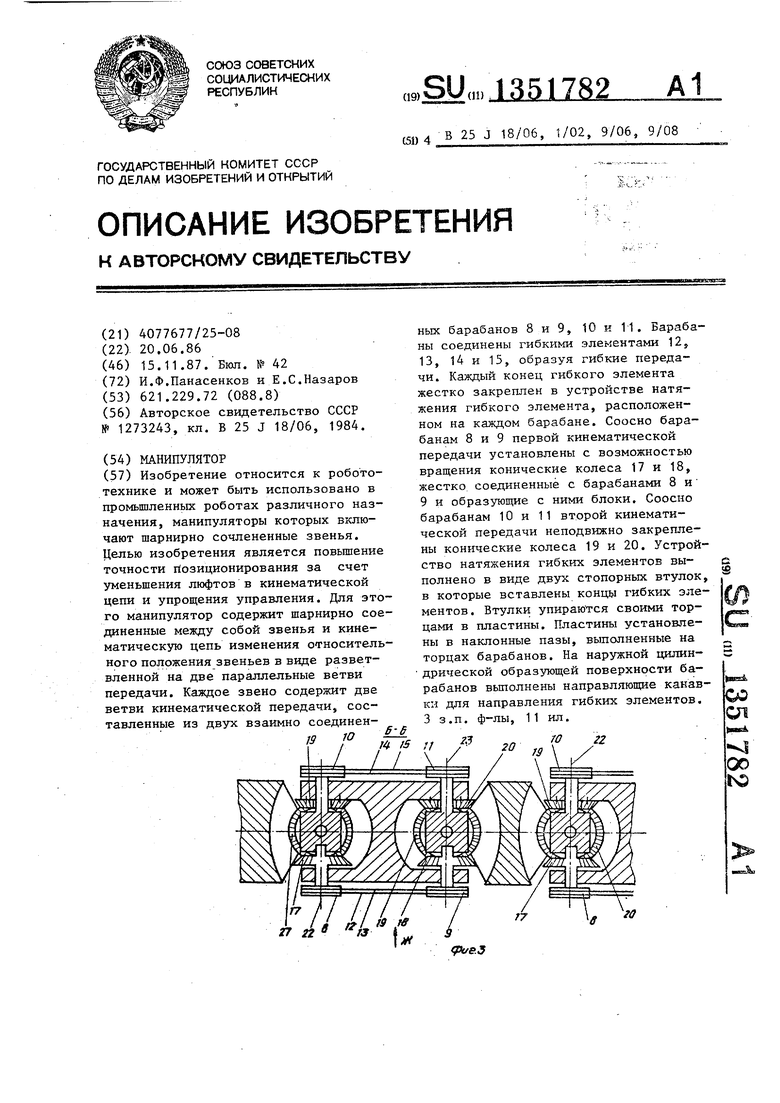
ffuffA
Bijfff
S
pue.8
J/
. и ТУ 11 I 11 I
фиг.9
8tffff
фие.Ш
.4- :-I-1ч4
Составитель И.Бакулина Редактор А.Маковская Техред Л.Олийнык Корректор А.Обручар
Заказ 5525/13 Тираж 952Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная , 4
| Манипулятор | 1984 |
|
SU1273243A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
