Изобретение относится к области электротехники, в частности к преобразовательной технике, и может быть использовано для управления зарядным устройством (ЗУ) с импульсным принципом действия и с силовой цепью, позволяющей, в процессе заряда аккумуляторной батареи (АБ) от первичного источника энергии (ПИЭ), обеспечить стабильность напряжения на включенных параллельно нагрузке и ПИЭ за счет регулирования величины входного тока ЗУ. Согласно предлагаемому способу управления зарядным устройством осуществляется дискретная обработка информационных сигналов и при этом достигаются малые длительность переходных процессов и статическая ошибка стабилизации напряжения на нагрузке и ПИЭ. Кроме того, силовая цепь ЗУ и предлагаемый способ управления позволяют заряжать АБ при напряжении на ней как меньше, так и больше напряжения нагрузке и ПИЭ.
Известен способ управления [1] импульсным стабилизатором напряжения (ИСН), выполненным в виде дросселя L и диода, включенных последовательно между входом и выходом стабилизатора, управляемого электрического ключа (УЭК), включенного между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатора с емкостью С, включенного между выходом и общим проводом стабилизатора, и подключенным к ПИЭ, обладающему свойствами источника тока и силой тока IПИЭ, заключающийся в том, что измеряют напряжение UВЫХ на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент KP<<KX, интегрируют первый сигнал, при этом ограничивая, путем прерывания интегрирования, диапазон изменения интеграла по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, формируют результирующий сигнал, суммируя третий и четвертый сигналы, результирующим сигналом формируют импульсы управления УЭК по принципу широтно-импульсной модуляции (ШИМ) с блокировкой модулятора в момент формирования модулируемого фронта импульса. При этом дополнительно из выходного напряжения UВЫХ выделяют динамическую составляющую UВЫХ.Д посредством частотной коррекции выходного напряжения UВЫХ реальным дифференцирующим звеном с передаточной функцией W(p)=T1P/(T1P+1), где T1>>T, получают второй и третий сигналы, запоминая в моменты времени mT, где m=1, 2, 3,…, соответственно, значения интеграла первого сигнала и значения динамической составляющей UВЫХ.Д выходного сигнала, получают четвертый сигнал, умножая третий сигнал на коэффициент  , где UA - амплитудное значение линейно нарастающий сигнала. При положительных значениях результирующего сигнала в моменты времени mT производят включение УЭК, а в моменты равенства результирующего сигнала и линейно нарастающего сигнала производят выключение УЭК, причем линейно нарастающий сигнал равен нулю в момент времени mT и увеличивается линейно до значения UA в момент времени mT+τ, где τ меньше периода Т на бесконечно малую величину, а коэффициент KX=4KОПТ/(2rCC+Т), где rC - внутреннее активное сопротивление конденсатора.
, где UA - амплитудное значение линейно нарастающий сигнала. При положительных значениях результирующего сигнала в моменты времени mT производят включение УЭК, а в моменты равенства результирующего сигнала и линейно нарастающего сигнала производят выключение УЭК, причем линейно нарастающий сигнал равен нулю в момент времени mT и увеличивается линейно до значения UA в момент времени mT+τ, где τ меньше периода Т на бесконечно малую величину, а коэффициент KX=4KОПТ/(2rCC+Т), где rC - внутреннее активное сопротивление конденсатора.
Этот способ позволяет обеспечить малые длительность переходных процессов и отклонение напряжения на выходе ИСН в динамических режимах работы и малую величину статической ошибки стабилизации напряжения на выходе ИСН.
Однако, этот способ непосредственно не может быть использован для управления ЗУ с целью обеспечения стабилизации напряжения на параллельно включенных ПИЭ и нагрузке одновременно с процессом заряда АБ по причине того, что согласно этого способа стабилизация напряжения осуществляется на выходе ИСН, к которому подключена нагрузка, а вход ИСН подключен к ПИЭ.
В качестве прототипа выбран способ управления [2] ИСН, который выполнен в виде первой пары соединенных последовательно первого и второго УЭК и подключенных между входом и общим проводом ИСН, причем параллельно каждому из УЭК первой пары подключен диод - в той полярности, которая обеспечивает его непроводящее состояние под действием напряжения на входе ИСН, второй пары соединенных последовательно третьего и четвертого УЭК и подключенных между входом и общим проводом ИСН, причем параллельно каждому из УЭК второй пары подключен диод - в той полярности, которая обеспечивает его непроводящее состояние под действием напряжения на выходе ИСН, дросселя L с индуктивностью L (Гн), включенного между точкой соединения первого и второго УЭК и точкой соединения третьего и четвертого УЭК, конденсатора С с емкостью С (Ф), подключенного между выходом и общим проводом ИСН, заключающегося в том, что измеряют напряжение UВЫХ (В) на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент KP, интегрируют первый сигнал, из выходного напряжения UВЫХ выделяют динамическую составляющую UВЫХ.Д посредством частотной коррекции выходного напряжения UВЫХ реальным дифференцирующим звеном с передаточной функцией W(p)=T1P/(T1P+1), где T1 - постоянная времени (с), причем T1>>T, р - оператор Лапласа, а Т - период преобразования (с), получают второй и третий сигналы, запоминая в моменты времени mT, где m=1, 2, 3,…, соответственно, значения интеграла первого сигнала и значения динамической составляющей UВЫХ.Д выходного сигнала, получают четвертый сигнал, умножая третий сигнал на коэффициент KОПТ, формируют результирующий сигнал, суммируя второй и четвертый сигналы, при положительных значениях результирующего сигнала самим результирующим сигналом по принципу ШИМ формируют импульсы UШИМ управления, причем на каждом m-том периоде преобразования передний фронт импульса управления соответствует началу периода преобразования и моменту времени t0=0, а задний - моменту времени t1, в который наступает равенство результирующего сигнала и опорного пилообразного напряжения, дополнительно для каждого из УЭК формируют сигналы управления, причем на каждом m-том периоде преобразования по переднему фронту импульса UШИМ управления производят выключение второго УЭК и, с задержкой на время tЗ.1<<T, включение первого УЭК, по заднему фронту импульса UШИМ управления производят выключение четвертого УЭК и, с задержкой на время tЗ.2<<T, включение третьего УЭК, измеряют напряжение UВХ на входе стабилизатора, вычисляют момент времени t2 по выражению 1: t2=(KрхТ-t1)UВЫХ/UВХ, где Kpx<1 - некоторый коэффициент, численно равный части периода Т, в течение которой ток дросселя больше обратного тока I0 дросселя (А), обратный ток I0 дросселя - некоторый ток дросселя, имеющий направление, противоположное тому, при котором происходит передача энергии со входа на выход стабилизатора и имеющий величину достаточную для переключения первого УЭК при нуле напряжения, в момент времени производят выключение второго УЭК и, с задержкой на время tЗ.3<<Т, включение первого УЭК, определяют момент времени tК, в который ток iL дросселя L меняет свое направление, вычисляют момент времени t3 по выражению 2: t3=tК - L I0/UВЫХ и в момент времени t3 производят выключение третьего УЭК и, с задержкой на время tЗ.4<<Т, включение четвертого УЭК.
Этот способ управления ИСН позволяет обеспечить малые длительность переходных процессов и отклонение напряжения на нагрузке в динамических режимах работы и малую величину статической ошибки стабилизации напряжения на нагрузке. Кроме того, применение силовой цепи, для управления УЭК которой применяется этот способ, позволяет обеспечить ИСН высокий КПД за счет переключения УЭК при близком к нулю напряжения, и возможность обеспечения повышения или понижения напряжения на выходе относительно входного [3].
Однако, этот способ непосредственно не может быть использован для управления ЗУ с целью обеспечения стабилизации напряжения на параллельно включенных ПИЭ и нагрузке, одновременно с процессом заряда АБ по причине того, что согласно этого способа стабилизация напряжения осуществляется на выходе ИСН, к которому подключена нагрузка, в то время, как ко входу ИСН подключается АБ и происходит ее разряд, т.е. энергия передается от АБ в нагрузку, а ПИЭ не генерирует энергию и может быть отключен.
В основу изобретения положена задача разработки способа управления зарядным устройством с импульсным принципом действия, силовая цепь которого имеет высокий КПД и может работать в режимах повышения и понижения напряжения. Применение этого способа управления должно обеспечивать, в процессе заряда АБ посредством ЗУ, малую длительность переходных процессов стабилизации напряжения на нагрузке, подключенной параллельно ПИЭ, при возмущающих воздействиях со стороны нагрузки и малую статическую ошибку стабилизации напряжения на нагрузке.
Поставленная задача решается тем, что в способе управления ЗУ с импульсным принципом действия, которое выполнено в виде первой пары соединенных последовательно первого и второго УЭК и подключенных между входом и общим проводом ЗУ, причем параллельно каждому из УЭК первой пары подключен диод - в той полярности, которая обеспечивает его непроводящее состояние под действием напряжения на входе ЗУ, второй пары соединенных последовательно третьего и четвертого УЭК и подключенных между выходом и общим проводом ЗУ, причем параллельно каждому из УЭК второй пары подключен диод - в той полярности, которая обеспечивает его непроводящее состояние под действием напряжения на выходе ЗУ, дросселя L с индуктивностью L (Гн), включенного между точкой соединения первого и второго УЭК и точкой соединения третьего и четвертого УЭК, конденсатора С с емкостью С (Ф), подключенного между входом и общим проводом ЗУ, заключающийся в том, что измеряют напряжения UВХ (В) и UВЫХ (B), соответственно, на входе и выходе ЗУ, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент KP, интегрируют первый сигнал, получают второй и третий сигналы запоминая, в моменты времени mT, где T1 - постоянная времени (с), a m=1, 2, 3,…, соответственно, значения интеграла первого сигнала и значения динамической составляющей UД напряжения, динамическую составляющую UД напряжения получают за счет частотной коррекции реальным дифференцирующим звеном с передаточной функцией W(p)=T1P/(T1P+1), где 7T1 - постоянная времени (с), причем T1>>T, р - оператор Лапласа, напряжения Ux, получают четвертый сигнал, умножая третий сигнал на коэффициент KОПТ, формируют результирующий сигнал, суммируя второй и четвертый сигналы, при положительных значениях результирующего сигнала самим результирующим сигналом по принципу ШИМ формируют импульсы UШИМ управления, причем на каждом m-том периоде преобразования передний фронт импульса управления соответствует началу периода преобразования и моменту времени t0=0, а задний -моменту времени t1 (с), в который наступает равенство результирующего сигнала и опорного пилообразного напряжения широтно-импульсного модулятора, для каждого из УЭК формируют сигналы управления, причем в начале каждого m-того периода преобразования в момент времени t0 я производят выключение второго УЭК и, с задержкой на время tЗ.1<<T, включение первого УЭК, в момент времени t1 производят выключение четвертого УЭК и, с задержкой на время tЗ.2<<Т, включение третьего УЭК, в момент времени t2 (с) производят выключение второго УЭК и, с задержкой на время tЗ.3<<T, включение первого УЭК, определяют момент времени tК (с), в который ток iL дросселя L меняет свое направление на противоположное тому, при котором происходит передача энергии со входа на выход ЗУ, вычисляют момент времени t3 (с) по выражению 2: t3=tК - L I0/ UВЫХ, где I0 (А) - некоторый ток дросселя, имеющий направление, противоположное тому, при котором происходит передача энергии со входа на выход ЗУ и имеющий величину I0, достаточную для переключения первого УЭК при нуле напряжения, в момент времени t3 производят выключение третьего УЭК и, с задержкой на время tЗ.4<<T, включение четвертого УЭК, согласно изобретению формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение U0 из напряжения UВХ на входе ЗУ, напряжение Ux принимают равным напряжению UВХ, а момент времени t2 определяется выражением: t2=t1+Δt, где Δt - фиксированный интервал времени, выбираемый исходя из условия: 0≤Δt<Т.
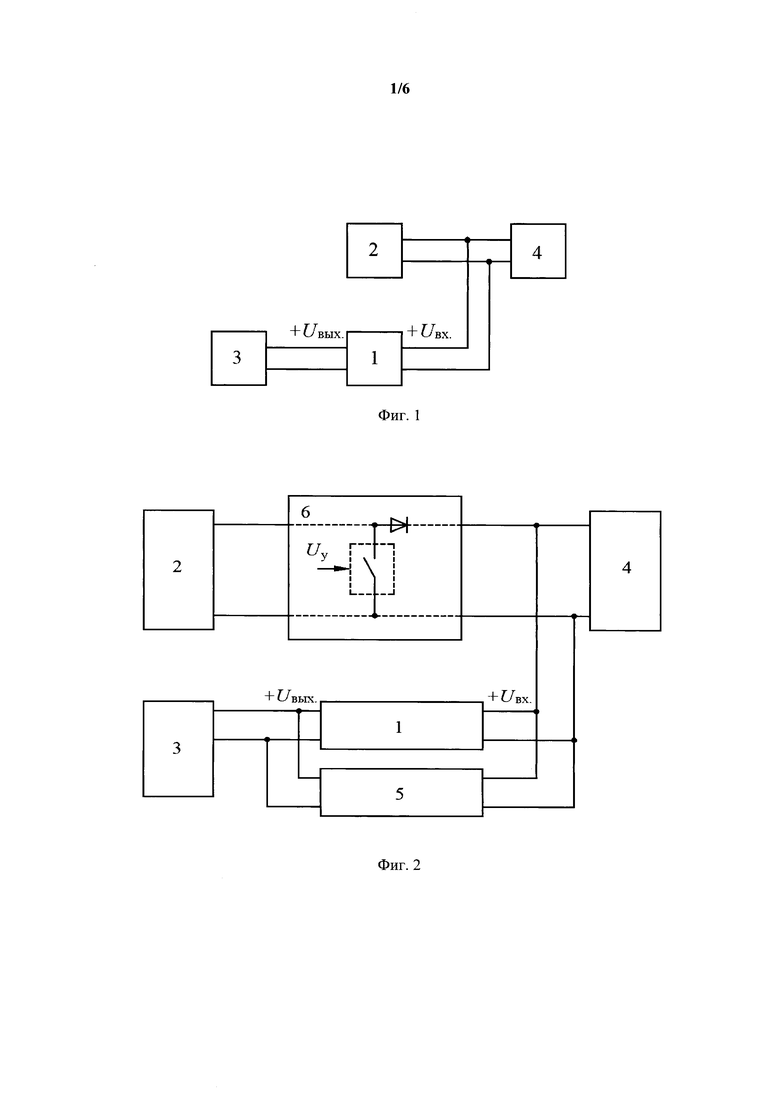
На фиг. 1 приведена структурная схема системы электропитания (СЭП), в состав которой входят ЗУ, ПИЭ, АБ и нагрузка. На фиг. 2 приведена структурная схема СЭП полной комплектности, в состав которой входят ЗУ, ПИЭ, АБ, нагрузка, разрядное устройство (РУ) и стабилизатор напряжения (СН). На фиг. 3 приведена функциональная схема ЗУ с устройством способа управления. На фиг. 4 приведены временные диаграммы тока дросселя ЗУ и сигналов управления УЭК зарядного устройства. На фиг. 5, фиг. 6 и фиг. 7 приведены временные диаграммы токов ПИЭ и нагрузки, напряжения на нагрузке и тока дросселя ЗУ.
Способ включения ЗУ в состав СЭП приведен на фиг. 1. В состав СЭП (фиг. 1) входят ЗУ 1, ПИЭ 2, АБ 3 и нагрузка 4. В СЭП такого состава стабилизация напряжения на нагрузке может осуществляться только в режиме заряда АБ посредством ЗУ. При этом ПИЭ имеет свойства, близкие к свойствам источника тока. В качестве такого ПИЭ, например, может использоваться солнечная батарея, работающая на участке вольтамперной характеристики между точкой короткого замыкания и точкой, соответствующей точке максимальной мощности солнечной батареи.
Способ включения ЗУ в состав СЭП полной комплектности приведен на фиг .2. В состав СЭП полной комплектности (фиг. 2) входят ЗУ 1, ПИЭ 2, АБ 3, нагрузка 4, РУ 5 и СН 6. В СЭП такого состава стабилизация напряжения на нагрузке в режиме, когда максимальная мощность ПИЭ превышает сумму мощностей, потребляемых нагрузкой и ЗУ в процессе заряда АБ, осуществляется посредством СН с шунтовым принципом регулирования, в котором, например, реализован способ [1]. В режиме работы СЭП, когда максимальная мощность ПИЭ меньше мощности нагрузки, в СН управляемый электрический ключ сигналом управления Uy переводится в непроводящее состояние, а ПИЭ подключается к нагрузке через диод, находящийся в проводящем состоянии. При этом стабилизация напряжения на нагрузке осуществляется посредством РУ. Стабилизация напряжения на нагрузке посредством РУ осуществляется и при отсутствии генерации энергии ПИЭ. В режиме работы СЭП, когда максимальная мощность ПИЭ больше мощности нагрузки, но меньше суммы мощностей, потребляемых нагрузкой и ЗУ в процессе заряда АБ желаемым током заряда, то заряд АБ осуществляется током, который меньше желаемого. При этом в СН управляемый электрический ключ сигналом управления Uy переводится в непроводящее состояние, ПИЭ подключается к нагрузке через диод, находящийся в проводящем состоянии, а стабилизация напряжения на нагрузке осуществляется посредством ЗУ. Заявляемый способ управления ЗУ и позволяет работать ЗУ в режиме стабилизации напряжения на нагрузке в процессе заряда АБ. При этом ПИЭ, входящий в состав СЭП, должен иметь свойства, близкие к свойствам источника тока. При использовании способа, описанного в [2], для управления РУ, и заявляемого способа для управления ЗУ, в качестве силовых цепей ЗУ и РУ может использоваться одна общая силовая цепь, поскольку она симметрична и обладает способностью реверса потока энергии [3].
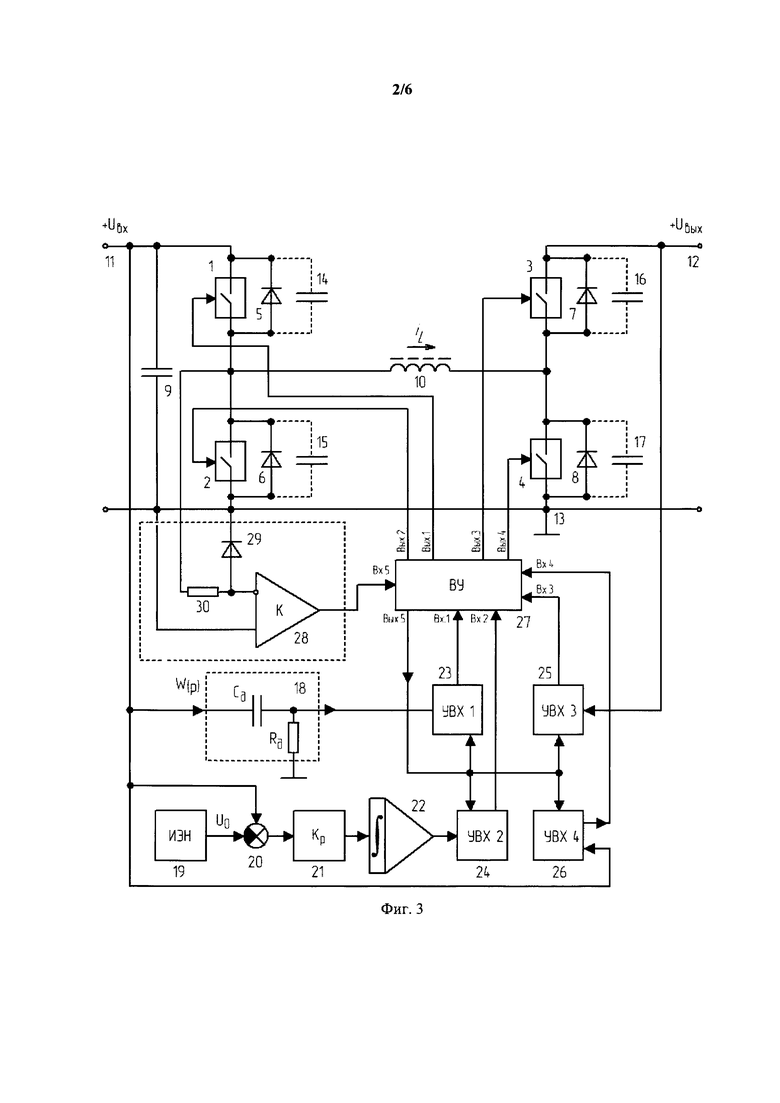
В состав ЗУ (фиг. 3) с устройством управления (УУ), обеспечивающим реализацию предложенного способа управления, входит силовая цепь содержащая первый 1, второй 2 третий 3 и четвертый 4 управляемые электрические ключи, диоды 5-8, входной конденсатор 9, дроссель 10, вход 11, выход 12, общий провод 13, первый 14, второй 15, третий 16 и четвертый 17 коммутирующие конденсаторы 14-17. В состав УУ входит дифференцирующая цепь 18, источник эталонного напряжения 19, сумматор 20, усилитель 21 с коэффициентом передачи KP, интегратор 22, первое 23, второе 24, третье 25 и четвертое 26 устройства выборки и хранения (УВХ), вычислительное устройство (ВУ) 27 с пятью входами и пятью выходами, компаратор 28, диод 29 и резистор 30.
При этом первый 1 и второй 2 УЭК силовыми выводами соединены последовательно и подключены между входом 11 и общим проводом 13 ЗУ, третий 3 и четвертый 4 УЭК силовыми выводами соединены последовательно и подключены между выходом 12, и общим проводом 13 ЗУ, дроссель 10 включен между точкой соединения первого 1 и второго 2 УЭК и точкой соединения третьего 3 и четвертого 4 УЭК, входной конденсатор 9 подключен между входом 11 и общим проводом 13 ЗУ. Диод 5 подключен катодом ко входу 11, а анодом к точке соединения первого 1 и второго 2 УЭК, диод 6 подключен катодом к точке соединения первого 1 и второго 2 УЭК, а анодом к общему проводу 13 ЗУ, диод 7 подключен катодом ко выходу 12, а анодом к точке соединения третьего 3 и четвертого 4 УЭК, диод 8 подключен катодом к точке соединения третьего 3 и четвертого 4 УЭК, а анодом к общему проводу 13 ЗУ. Каждый из коммутирующих конденсаторов 14-17 по отдельности подключен, соответственно, параллельно диодам 5-8.
Дифференцирующая цепь 18 своим входом подключена ко входу 11 ЗУ, а выходом - к информационному входу первого УВХ 23, сумматор 20 подключен первым входом ко входу 11 ЗУ, вторым вычитающим входом - к источнику эталонного напряжения 19, а выходом - ко входу усилителя 21. Интегратор 22 входом подключен к выходу усилителя 21, а выходом - к информационному входу второго УВХ 24. Компаратор 28 подключен неинвертирующим входом к общему проводу 13 ЗУ, а инвертирующим входом - к аноду диода 29 и первому выводу резистора 30. Катод диода 29 соединен с общим проводом 13 ЗУ, а второй вывод резистора 30 - с точкой соединения УЭК 1 и 2. ВУ 27 подключено первым, вторым, третьим, четвертым и пятым входами соответственно к выходам первого 23, второго 24, третьего 25 четвертого 26 УВХ и выходу компаратора 28. ВУ 27 своими первым - четвертым выходами соединено, соответственно, с управляющими входами первого 1 - четвертого 4 УЭК, а пятым выходом ВУ 27 подключено к управляющим входам первого 23, второго 24, третьего 25 четвертого 26 УВХ. Информационный вход третьего 25 УВХ подключен к выходу ЗУ, а информационный вход четвертого 26 УВХ подключен ко входу ЗУ.
Для осуществления предлагаемого способа управления, в ЗУ, выполненном согласно функциональной схеме (фиг. 3) измеряют напряжение UВХ на входе ЗУ, формируют сигнал рассогласования по напряжению, вычитая посредством сумматора 20 неизменное эталонное напряжение U0, задаваемое источником эталонного напряжения 19 из напряжения UВХ на входе 11 ЗУ. Выходной сигнал сумматора 20 - сигнал рассогласования по напряжению, усиливают в KP раз посредством усилителя 21, далее интегрируют интегратором 22 и полученный интеграл усиленного сигнала рассогласования подают на информационный вход второго УВХ 24. Напряжение UВХ на входе 11 ЗУ подают на вход реального дифференцирующего звена с передаточной функцией W(p)=T1P/(T1P+1), где T1>>T, а Т- период преобразования стабилизатора и получают на его выходе динамическую составляющую UВХ.Д входного напряжения, которая далее поступает на информационный вход первого УВХ 23. На информационные входы третьего 25 и четвертого 26 УВХ поступают, соответственно выходное UВЫХ и входное UВХ напряжения ЗУ.
Вычислительное устройство 27 на основании информации, полученной по своим пяти входам, формирует на своих четырех выходах сигналы управления УЭК ЗУ. ВУ 27 на своем пятом выходе формирует короткие импульсы с периодом Т и длительностью tИ<<T, поступающие на управляющие входы первого 23, второго 24, третьего 25 и четвертого 26 УВХ. Задний фронт этого короткого импульса соответствует моменту времени to, совпадающему с началом очередного m-того периода преобразования в ЗУ. По заднему фронту короткого импульса первое 23, второе 24, третье 25 и четвертое 26 УВХ осуществляют запоминание сигналов, поступающих на их информационные входы. Таким образом в начале каждого m-того периода Т преобразования первое УВХ 23 запоминает значение динамической составляющей UВХ.Д входного напряжения, а второе УВХ 24 - интеграл усиленного в KP раз сигнала рассогласования по напряжению, третье УВХ 25 - выходное UВЫХ, а четвертое УВХ 26 - входное UВХ напряжения ЗУ. Сигналы с выходов первого 23, второго 24, третьего 25 четвертого 26 УВХ поступают, соответственно, на первый, второй, третий и четвертый второй входы ВУ 27 и оцифровываются ВУ 27. Далее в ВУ 27 полученное цифровое значение сигнала, поступающего на первый вход, умножается на коэффициент KОПТ, полученный результат суммируется с полученным цифровым значением сигнала, поступающего на собственный второй вход, а результатом суммирования цифровых сигналов формируют, по принципу ШИМ, импульсный сигнал UШИМ, у которого передний фронт совпадает с моментом времени t0, а задний фронт - совпадает с моментом времени t1, в который происходит равенство результата суммирования цифровых сигналов и постепенно возрастающего, в течение периода Т, цифрового сигнала, в момент времени t0 начинающего свой рост от нулевого значения.
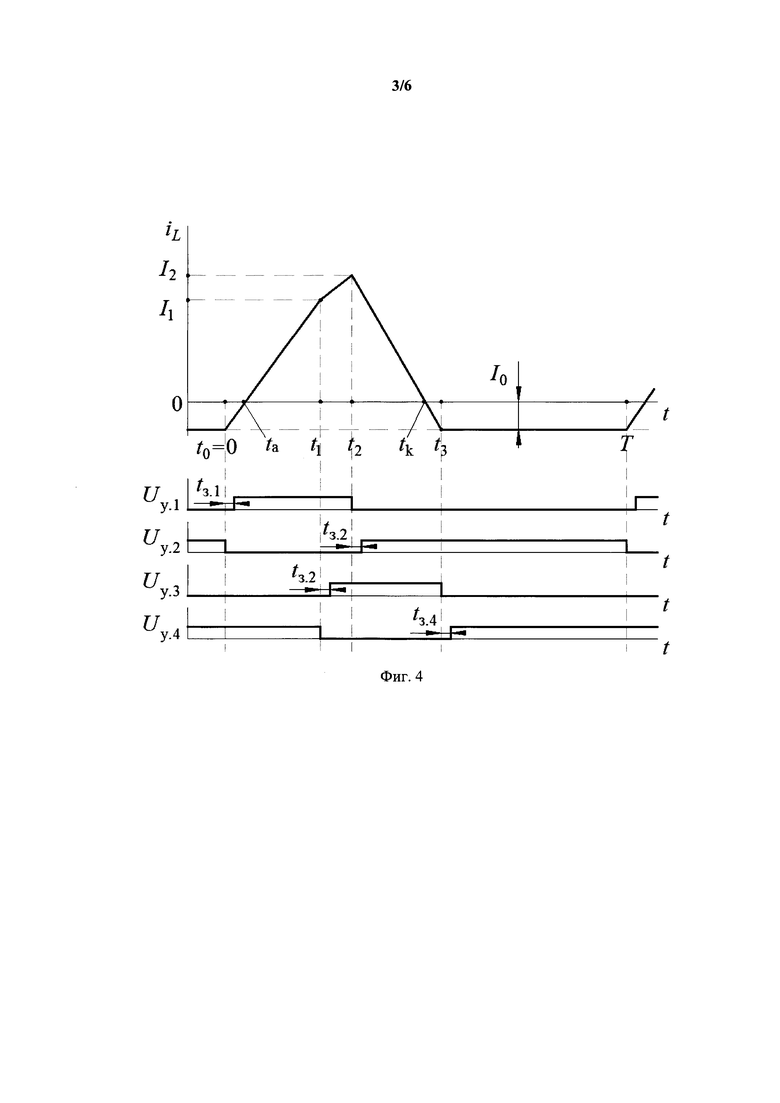
На фиг. 4 приведены временные диаграммы тока дросселя и сигналов управления УЭК зарядного устройства, поясняющие рассматриваемые процессы. Рассмотрен случай, когда напряжение на выходе ЗУ, равное напряжению на АБ, меньше напряжения на входе ЗУ, равного напряжению на нагрузке. Момент времени t0 совпадает с началом очередного m-того периода преобразования в ЗУ. На интервале времени, непосредственно предшествующем моменту времени t0 в проводящем состоянии находятся УЭК 2 и 4. Ток iL дросселя L имеет направление, противоположное указанному стрелкой на фиг. 3, т.е. является отрицательным и замыкается по контуру - УЭК 2, общий провод 13, УЭК 4 и дроссель 10. В момент времени t0 ВУ25 формирует на своем выходе 2 задний фронт сигнала Uy.2, что переводит УЭК 2 в непроводящее состояние. После момента времени t0, ток iL дросселя L, не изменяя направление, начинает заряжать конденсатор 15 и разряжать конденсатор 14. При этом энергия, накопленная в дросселе, расходуется, и его ток уменьшается. Спустя некоторое время напряжение на конденсаторе 15 изменяет свой знак, что приводит к переходу диода 5 в проводящее состояние. Далее, спустя некоторое время tЗ.1<<T относительно момента времени t0 ВУ 27 на своем выходе 1 формирует передний фронт сигнала управления Uy.1, что переводит УЭК 1 в проводящее состояние. Поскольку переход УЭК 1 в проводящее состояние происходит при напряжении, равном напряжению на диоде в проводящем состоянии, то динамические потери энергии на УЭК 1 минимальны. Далее спустя некоторое малое время ta-t0, ток iL дросселя 10, изменяет свое направление и начинает возрастать, проходя по цепи: вход 11, УЭК 1, дроссель 10, УЭК 4, общий провод 13. В момент времени t1, совпадающий с задним фронтом импульсного сигнала UШИМ, сформированного по принципу ШИМ, ВУ27 формирует на своем выходе 4 задний фронт сигнала Uy.4, что переводит УЭК 4 в непроводящее состояние. С задержкой некоторое время tЗ.2<<T, ВУ 27 на своем выходе 3 формирует передний фронт сигнала управления Uy.3, что переводит УЭК 3 в проводящее состояние. Задержка включения УЭК 3 на время tЗ.2 относительно момента времени t1 обеспечивает его переход в проводящее состояние при близком к нулю напряжении. Интервал времени tЗ.2 должен иметь длительность достаточную для смены полярности напряжения на конденсаторе 16 и перехода диода 7 в проводящее состояние. После наступления момента времени t1 ток iL дросселя 10, проходит по цепи: вход 11, УЭК 1, дроссель 10, УЭК 3, выход 12, замыкаясь через нагрузку и общий провод 13. Если напряжение на выходе 12 больше напряжения на входе 11, то ток iL дросселя 10 уменьшается (см. фиг. 3), а если напряжение на выходе 12 меньше напряжения на входе 11, то ток iL дросселя 10 увеличивается. ВУ 27 вычисляет момент времени t2 в соответствие с выражением: t2=t1+Δt, где Δt - фиксированный интервал времени, выбираемый исходя из условия: 0≤Δt<Т.
В момент времени t2 ВУ27 формирует на своем выходе 1 задний фронт сигнала Uy.1, что переводит УЭК 1 в непроводящее состояние. С задержкой некоторое время tЗ.3<<T, ВУ 27 на своем выходе 2 формирует передний фронт сигнала управления Uy.2, что переводит УЭК 2 в проводящее состояние. Задержка включения УЭК 2 на время tЗ.3 относительно момента времени t2 обеспечивает его переход в проводящее состояние при близком к нулю напряжении. Интервал времени tЗ.3 должен иметь длительность достаточную для смены полярности напряжения на конденсаторе 15 и перехода диода 6 в проводящее состояние. После наступления момента времени t2 ток iL дросселя 10, проходит по цепи: общий провод 13, УЭК 2, дроссель 10, УЭК 3, выход 12, замыкаясь через нагрузку на общий провод 13. При этом расходуется энергия, накопленная в дросселе 10, и его ток уменьшается.
В момент времени tК (фиг. 4) ток iL дросселя 10 изменяет свое направление на противоположное, т.е. становится отрицательным. При этом изменяется полярность напряжения на УЭК 2, происходит переключение компаратора 26 и с выхода компаратора 26 на собственный вход 1 ВУ 27 поступает сигнал. ВУ 27 по выражению: t3=tК - L I0/UВЫХ, где I0<0, производит вычисление момента времени t3. Обратный ток I0 дросселя 10 - это некоторый ток дросселя, имеющий направление, противоположное тому, при котором происходит передача энергии со входа на выход стабилизатора и имеющий величину достаточную для переключения транзисторов при нуле напряжения.
В момент времени t3 ВУ27 формирует на своем выходе 3 задний фронт сигнала Uy.3, что приводит к выключению УЭК 3. С задержкой некоторое время tЗ.4<<T, ВУ 27 на своем выходе 4 формирует передний фронт сигнала управления Uy.4, что приводит к включению УЭК 4. Задержка включения УЭК 4 на время tЗ.4 относительно момента времени t3 обеспечивает его переход в проводящее состояние при близком к нулю напряжении. Интервал времени tЗ.4 должен иметь длительность достаточную для смены полярности напряжения на конденсаторе 17 и перехода диода 8 в проводящее состояние. После наступления момента времени t3 и отпирания УЭК 4 ток iL дросселя 10, проходит по цепи: дроссель 10, УЭК 2, общий провод 13, УЭК 4. При этом расходуется энергия, накопленная в дросселе L, и его ток уменьшается. В силу низкого омического сопротивления этого контура потери энергии в нем незначительны и ток дросселя изменяется незначительно.
Коэффициент KP усиления сигнала рассогласования и коэффициент Kопт, на который умножаются запомненные значения составляющей UВХ.Д зависят от величины напряжения UВХ на входе ЗУ, максимального и минимального значений напряжения UВЫХ на выходе ЗУ, подключаемого к АБ, индуктивности L дросселя 10, емкости С конденсатора С 9 и периода Т преобразования. Значения коэффициентов KP и KОПТ, при которых за 2-4 периода преобразования после момента действия возмущающего воздействия наступает режим установившихся колебаний тока дросселя и за 10-15 периодов устраняется статическая ошибка стабилизации выходного напряжения - определяются опытным путем с использованием имитационной модели ИСН или его физического макета.
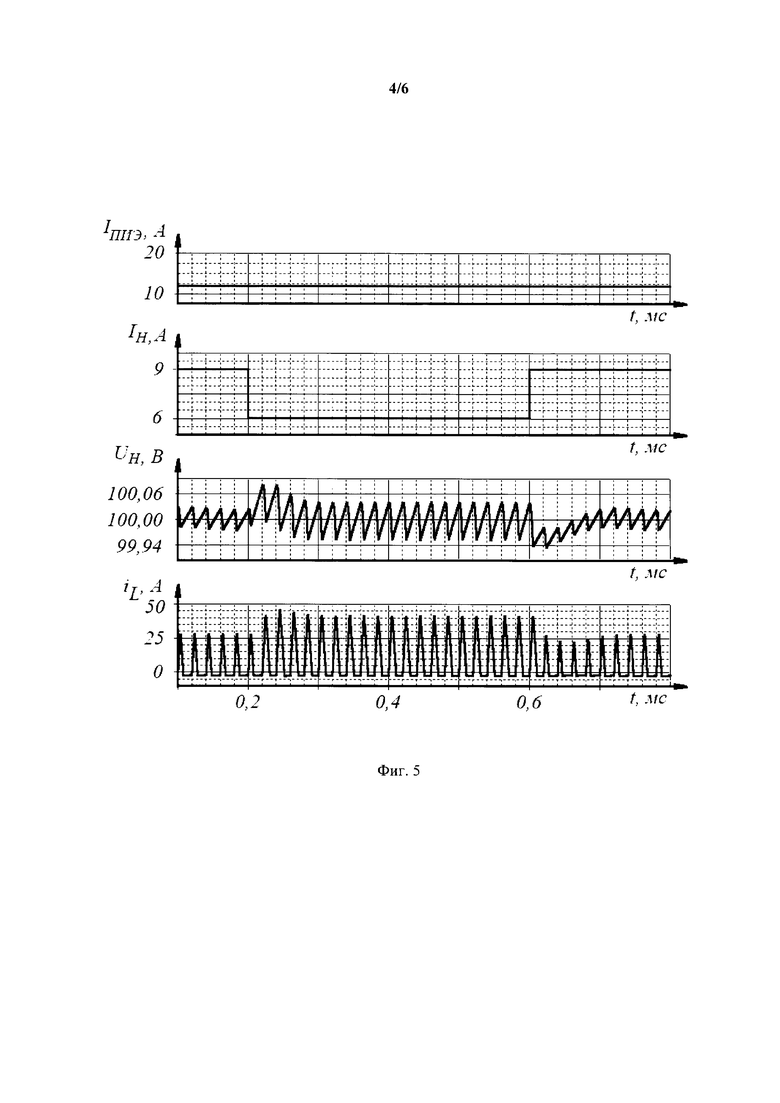
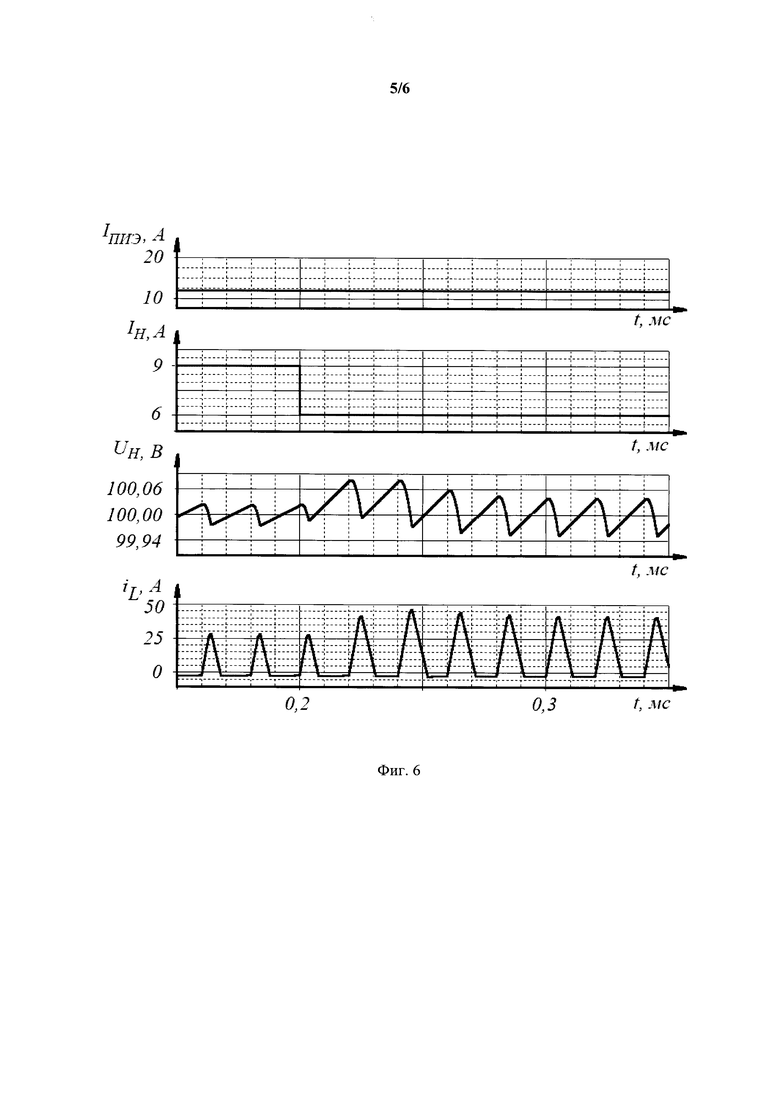
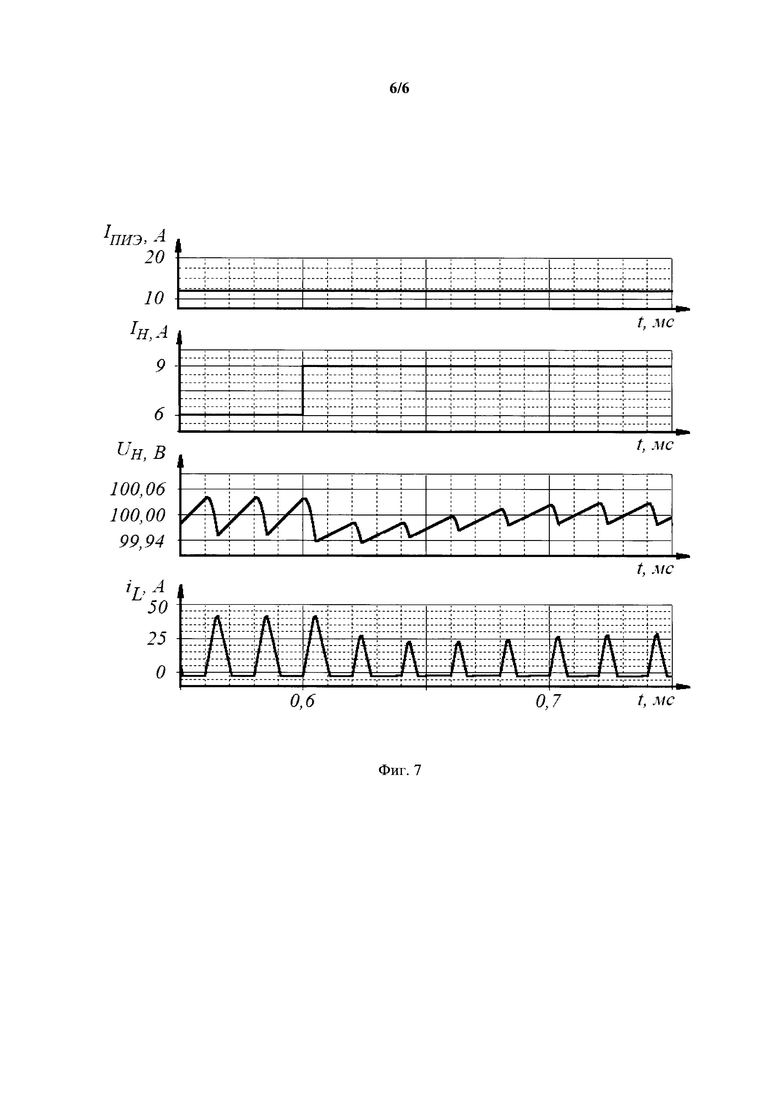
На фиг. 5-7 в приведены временные диаграммы тока IПИЭ ПИЭ, тока IН нагрузки, напряжения UН на входе ЗУ и тока iL дросселя 10, полученные с использованием имитационной модели ЗУ. Моделирование выполнено на ЭВМ с использованием пакета программ для сквозного схемотехнического проектирования OrCAD версии 16.6. Модель имеет следующие параметры силовой цепи: индуктивность дросселя L=10 мкГн, емкость входного конденсатора С=1000 мкФ, период преобразования Т=20 мкс. Напряжение на входе ЗУ UН=100 В, а на выходе - UВЫХ=75 В. На фиг. 5 показаны: ток IПИЭ ПИЭ, ток IН нагрузки, напряжение UН на входе ЗУ и ток iL дросселя 10 при ступенчатом уменьшении и последующем ступенчатом увеличении тока IН нагрузки. На фиг. 6 в ином масштабе времени показаны: ток IПИЭ ПИЭ, ток IН нагрузки, напряжение UН на входе ЗУ и ток iL дросселя 10 при ступенчатом уменьшении тока нагрузки. На фиг. 7 в ином масштабе времени (относительно фиг. 5) показаны: ток IПИЭ ПИЭ, ток IН нагрузки, напряжение UН на входе ЗУ и ток iL дросселя 10 при ступенчатом увеличении тока нагрузки.
Исследование процессов в ЗУ с предложенным способом управления и СЭП, содержащей ЗУ, проведенные на ЭВМ с использованием имитационной модели СЭП, включающей имитационную модель ЗУ, показали работоспособность предложенного способа управления, достижение малой длительности переходных процессов стабилизации напряжения на входе ЗУ, равного напряжению на нагрузке, при возмущающих воздействиях в виде ступенчатого изменения тока нагрузки и малую статическую ошибку стабилизации напряжения на нагрузке.
Источники информации:
1. Патент №2621071 Российская Федерация, МПК G05F 1/56. Способ управления импульсным стабилизатором напряжения / О.В. Непомнящий, О.А. Донцов, А.С. Правитель, Ю.В. Краснобаев. - Опубл. 31.05.2017, Бюл. №16.
2. Патент №2764783 Российская Федерация, МПК Н02М 7/53862. Способ управления импульсным стабилизатором напряжения / О.В. Непомнящий, Ю.В. Краснобаев, А.П. Яблонский, И.Е. Сазонов. - Опубл. 21.01.2022, Бюл. №3.
3. Waffler, S. and Kolar, J. W., "A novel low-loss modulation strategy for high-power bidirectional buck + boost converters," in Proc. 7th Internatonal Conference on Power Electronics ICPE '07, 22-26 Oct. 2007, pp. 889-894.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| Драйвер для светодиодного светильника | 2020 |
|
RU2742050C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ КОММУТАЦИОННЫХ ПЕРЕНАПРЯЖЕНИЙ | 2005 |
|
RU2309534C1 |
| Стабилизатор напряжения переменного тока | 2016 |
|
RU2615782C1 |
Изобретение относится к преобразовательной технике и может быть использовано для управления зарядным устройством с импульсным принципом действия, которое в процессе заряда аккумуляторной батареи обеспечивает стабилизацию напряжения на выходе первичного источника энергии, к которому подключено зарядное устройство. При этом обеспечиваются малые амплитуда и длительность переходных процессов и астатизм напряжения на выходе первичного источника энергии и на нагрузке, подключенной параллельно первичному источнику энергии. На каждом периоде Т работы зарядного устройства в окрестности моментов времени t0, t1, t2 и t3 производят переключение управляемых электронных ключей. Момент времени t0 совпадает с началом периода Т, а момент времени t1 формируется по принципу широтно-импульсной модуляции в функции интеграла сигнала рассогласования по входному напряжению и динамической составляющей входного напряжения Uвх зарядного устройства. Моменты времени t2 и t3 зависят от момента времени t1, индуктивности дросселя L, входного Uвх и выходного Uвых напряжений зарядного устройства, момента времени tк, в который ток дросселя принимает отрицательное значение, некоторых отрицательного тока I0 дросселя и коэффициента Kpx и вычисляются по формулам: t2=t1+Δt, где Δt - фиксированный интервал времени, выбираемый исходя из условия: 0≤Δt<Т и t3=tК-LI0/UВЫХ. 7 ил.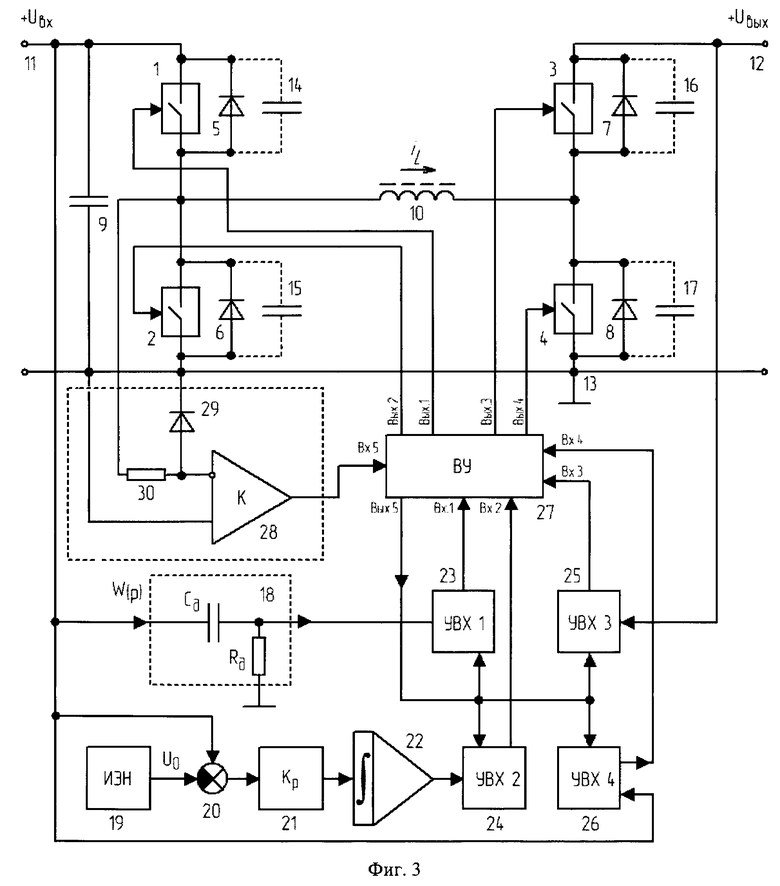
Способ управления зарядным устройством с импульсным принципом действия, которое выполнено в виде первой пары соединенных последовательно первого и второго управляемых электрических ключей и подключенных между входом и общим проводом зарядного устройства, причем параллельно каждому из управляемых электрических ключей первой пары подключен диод в той полярности, которая обеспечивает его непроводящее состояние под действием напряжения на входе зарядного устройства, второй пары соединенных последовательно третьего и четвертого управляемых электрических ключей и подключенных между выходом и общим проводом зарядного устройства, причем параллельно каждому из управляемых электрических ключей второй пары подключен диод в той полярности, которая обеспечивает его непроводящее состояние под действием напряжения на выходе зарядного устройства, дросселя L с индуктивностью L (Гн), включенного между точкой соединения первого и второго управляемых электрических ключей и точкой соединения третьего и четвертого управляемых электрических ключей, конденсатора С с емкостью С (Ф), подключенного между входом и общим проводом зарядного устройства, заключающийся в том, что измеряют напряжения Uвх(B) и Uвых(B) соответственно на входе и выходе зарядного устройства, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент KP, интегрируют первый сигнал, получают второй и третий сигналы, запоминая, в моменты времени mТ, где T1 - постоянная времени (с), a m=1, 2, 3,…, соответственно, значения интеграла первого сигнала и значения динамической составляющей UД, получают четвертый сигнал, умножая третий сигнал на коэффициент Kопт, формируют результирующий сигнал, суммируя второй и четвертый сигналы, при положительных значениях результирующего сигнала самим результирующим сигналом по принципу широтно-импульсной модуляции формируют импульсы UШИМ управления, причем на каждом m-м периоде преобразования передний фронт импульса управления соответствует началу периода преобразования и моменту времени t0=0, а задний - моменту времени t1 (с), в который наступает равенство результирующего сигнала и опорного пилообразного напряжения, для каждого из управляемых электрических ключей формируют сигналы управления, причем в начале каждого m-го периода преобразования по переднему фронту импульса UШИМ управления производят выключение второго управляемого электрического ключа и, с задержкой на время tЗ.1<<T, включение первого управляемого электрического ключа, по заднему фронту импульса UШИМ управления производят выключение четвертого управляемого электрического ключа и, с задержкой на время tЗ.2<<T, включение третьего управляемого электрического ключа, в момент времени t2 (с) производят выключение второго управляемого электрического ключа и, с задержкой на время tЗ.3<<Т, включение первого управляемого электрического ключа, определяют момент времени tК (с), в который ток iL дросселя L меняет свое направление на противоположное тому, при котором происходит передача энергии со входа на выход зарядного устройства, вычисляют момент времени t3 (с) по выражению 2: t3=tК-LI0/UВЫХ, где I0 (А) - ток дросселя, имеющий направление, противоположное тому, при котором происходит передача энергии со входа на выход зарядного устройства, и имеющий величину I0, достаточную для переключения первого управляемого электрического ключа при нуле напряжения, в момент времени t3 производят выключение третьего управляемого электрического ключа и, с задержкой на время tЗ.4<<T, включение четвертого управляемого электрического ключа, отличающийся тем, что формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение U0 из напряжения UВХ, на входе зарядного устройства, динамическую составляющую UД получают посредством частотной коррекции напряжения UВХ, на входе зарядного устройства, реальным дифференцирующим звеном с передаточной функцией W(p)=T1P/(T1P+1), где Т1 - постоянная времени (с), причем T1>>T, р - оператор Лапласа, а момент времени t2 определяется выражением: t2=t1+Δt, где Δt - фиксированный интервал времени, выбираемый исходя из условия: 0≤Δt<Т.
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| US 4630187 A1, 16.12.1986 | |||
| US 10468917 B2, 05.11.2019 | |||
| US 7701178 B2, 20.04.2010. | |||
