Изобретение относится к устройствам механического перемещения объектов вдоль одной координаты. Оно может быть использовано, например, в сканирующем зондовом микроскопе (СЗМ) для сближения зонда и образца.
Известен линейный инерционный шаговый двигатель, содержащий основание, на котором первыми концами закреплены три пьезотрубки, на вторых концах которых установлены сферические опоры, расположенные с возможностью взаимодействия посредством направляющих с подвижной платформой [1].
Недостаток этого устройства заключается в том, что из-за одностороннего расположения опор относительно платформы его нельзя использовать для вертикального перемещения объектов.
Известен также инерционный шаговый двигатель, содержащий основание, с закрепленным на нем пьезомодулем, соединенным с направляющей, на которой установлена каретка с возможностью перемещения вдоль ее оси, а также блок управления, подключенный к пьезомодулю [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток этого устройства связан с внутренними люфтами в цепочке: основание - пьезомодуль - направляющая, что может приводить к нестабильности перемещения каретки. Вторым недостатком является возможность разрушения пьезомодуля при ударных нагрузках.
Технический результат изобретения заключается в повышении стабильности работы двигателя и его надежности.
Указанный технический результат достигается тем, что в инерционный шаговый двигатель, включающий основание, на котором первым концом закреплен первый пьезомодуль, соединенный вторым концом с первым концом направляющей, сопряженной с подвижной кареткой, введен кронштейн, закрепленный на основании и сопряженный со вторым концом направляющей.
Существуют варианты, в которых кронштейн сопряжен со вторым концом направляющей посредством винта либо посредством первого пружинного элемента, либо посредством винта и первого пружинного элемента, либо посредством второго пьезомодуля.
Существуют также варианты, в которых между вторым пьезомодулем и кронштейном расположен винт или второй пружинный элемент, или винт и второй пружинный элемент.
Возможны варианты, в которых поверхность направляющей, находящаяся во взаимодействии с подвижной кареткой, либо поверхность подвижной каретки, находящаяся во взаимодействии с направляющей, выполнена из поликора.
На фиг.1 изображена схема инерционного шагового двигателя.
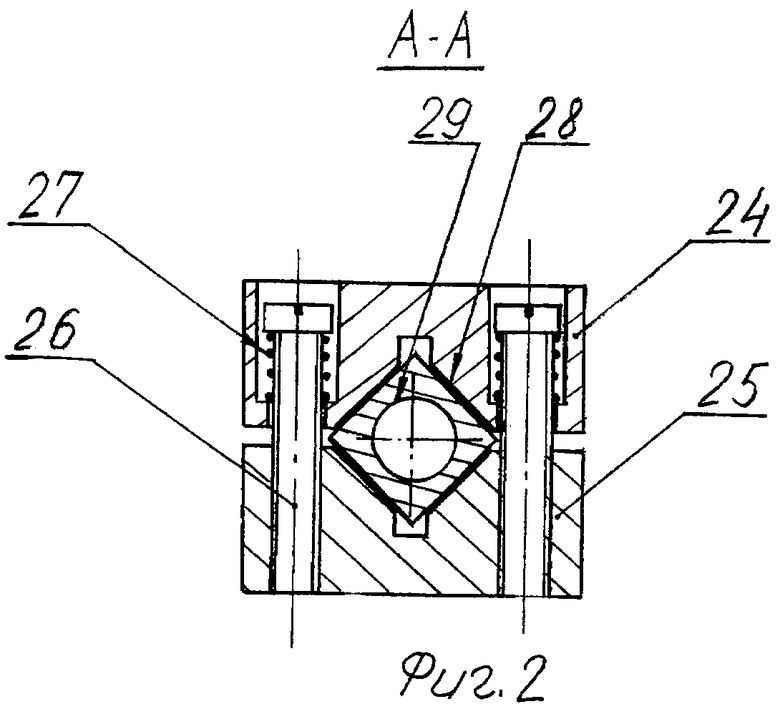
На фиг.2 - двигатель в разрезе.
Инерционный шаговый двигатель содержит основание 1 (фиг.1), на котором первым концом 2 закреплен первый пьезомодуль 3, второй конец 4 которого соединен с первым концом 5 направляющей 6, имеющей также второй конец 7.
На основании 1 первым отгибом 8 закреплен кронштейн 9, второй отгиб 10 которого сопряжен со вторым концом 7 направляющей 6. Это сопряжение может быть осуществлено посредством второго пьезомодуля 11, пружинного элемента 12 и винта 13.
Пружинный элемент 12 может содержать корпус 14, вкладыш 15 и пружину 16. Вкладыш 15 может быть установлен по скользящей посадке в корпусе 14, а корпус 14 по скользящей посадке в выборке 17. Соответственно первый 3 и второй 11 пьезомодули могут сопрягаться с ответными элементами через выборки 18, 19, 20 и 21.
Возможны варианты, в которых второй пьезомодуль 11 отсутствует и направляющая 6 поджата непосредственно винтом 13 либо винтом 13 и пружинным элементом 12.
Первый пьезомодуль 3 с основанием 1 и направляющей 6 может быть соединен посредством клея.
Возможно также использование клея для соединения второго пьезомодуля 11 с направляющей 6 и пружинным элементом 12.
В частном случае клей может не использоваться, а соединение всей цепочки осуществлять посредством поджима винтом 13.
Первый 3 и второй 11 пьезомодули подключены к блоку управления 22. На направляющей 6 установлена подвижная каретка 23, состоящая из первого элемента 24 и второго элемента 25. Эти элементы соединены винтами 26 (фиг.2) с использованием пружин 27. На элементах 24 и 25 могут быть закреплены (клеем) поликоровые пластины 28.
Поликоровые пластины также можно крепить на направляющей 6.
Высота микронеровностей трущихся поверхностей поликоровых пластин может быть в пределах 1-10 мкм.
Направляющая 6 и элементы 24 и 25 могут быть изготовлены из титана с высотой микронеровностей трущихся частей ~ 1-10 мкм, на которых может быть нанесена графитовая смазка.
На фиг.2 изображено сечение направляющих 6 в виде квадрата. Возможны другие варианты сечения: прямоугольное, треугольное, круглое и т.п.
С целью облегчения подвижной части инерционного двигателя направляющая 6 может иметь отверстия 29 или выборку иной формы.
Устройство работает следующим образом. На пьезоэлементы 3 и 11 синхронно и синфазно подают пилообразное напряжение. Направляющая 6 осуществляет возвратно-поступательное перемещение по оси Х с различными ускорениями. В результате этого подвижная каретка 23 осуществляет инерционное перемещение по направляющей 6. Подробно работу инерционных двигателей см. в [3, 4].
В данной конструкции возможен также вариант, в котором при осуществлении инерционного перемещения каретки 6 первым пьезомодулем 3 на низкой частоте (например ~ 100 Гц) включают второй пьезомодуль 11 на высокой частоте >1000 Гц только в тот момент времени, когда должно происходить проскальзывание каретки 23 относительно направляющей 6. Эти включения будут способствовать проскальзыванию за счет активизации зоны трения между кареткой 23 и направляющей 6.
Введение кронштейна, закрепленного на основании и сопряженного со вторым концом направляющей, повышает долговечность работы устройства за счет уменьшения вероятности разрушения первого пьезомодуля. Помимо этого кронштейн позволяет создавать предварительное сжатие в первом пьезомодуле, что уменьшает внутренние люфты в цепочке: основание - первый пьезомодуль - направляющая, а также повышает стабильность работы двигателя. Данная конструкция позволяет также исключить клеевое соединение этих элементов, что целесообразно в условиях термоциклирования, где клей не всегда выдерживает этот процесс. Помимо этого увеличивается ремонтопригодность конструкции.
Сопряжение кронштейна со вторым концом направляющей посредством винта, первого пружинного элемента либо того и другого позволяет регулировать поджим первого пьезомодуля, выбирая оптимальные режимы его работы. Данное решение позволяет также выбирать резонансную частоту конструкции, что повышает надежность устройства за счет уменьшения вероятности выхода его в режим несанкционированного резонанса. При этом, наоборот, при небольших амплитудах раскачки (менее 0,2 мкм) может случиться так, что режим работы при резонансе будет единственно возможным.
Введение второго пьезомодуля и его синхронное включение с первым пьезомодулем на той же частоте позволяет двигать более массивные объекты.
Использование второго пьезомодуля на частоте, превышающей частоту инерционной подвижки, позволяет изменять силу трения в паре направляющая - подвижная каретка, что увеличивает стабильность двигателя.
Введение поликоровых направляющих позволяет стабилизировать силу трения и соответственно работу двигателя за счет уменьшения вероятности возникновения эффекта «молекулярного залипания».
ЛИТЕРАТУРА
1. Патент RU 2152103, 1996.
2. Googi, Attocube systems AG Inertial motor Driving controller ANC 150.
3. Зондовая микроскопия для биологии и медицины. В.А.Быков и др. Сенсорные системы, т.12, №1, 1998 г., с.99-121.
4. Сканирующая туннельная и атомносиловая микроскопия в электрохимии поверхности. Данилов А.И. Успехи химии, 64 (8), 1995 г., с.818-833.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2347300C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2537363C2 |
| КРИОГЕННЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2271583C1 |
Изобретение относится к устройствам механического перемещения объектов вдоль одной координаты. Оно может быть использовано, например, в сканирующем зондовом микроскопе (СЗМ) для сближения зонда и образца. Сущность изобретения заключается в том, что в инерционный шаговый двигатель, включающий основание, на котором первым концом закреплен первый пьезомодуль, соединенный вторым концом с первым концом направляющей, сопряженной с подвижной кареткой, введен кронштейн, закрепленный на основании и сопряженный со вторым концом направляющей. Технический результат изобретения заключается в повышении стабильности работы двигателя и его надежности, а именно в повышении долговечности работы устройства за счет уменьшения вероятности разрушения первого пьезомодуля, в уменьшении внутренних люфтов в цепочке: основание - первый пьезомодуль - направляющая. Данная конструкция позволяет также исключить клеевое соединение этих элементов, что целесообразно в условиях термоциклирования, где клей не всегда выдерживает этот процесс. Помимо этого увеличивается ремонтопригодность конструкции. 9 з.п. ф-лы, 2 ил.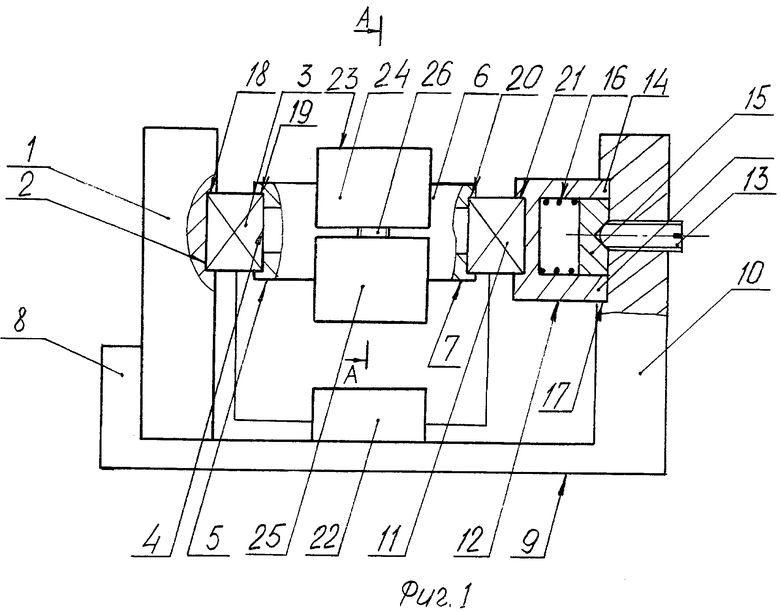
1. Инерционный шаговый двигатель, включающий основание, на котором первым концом закреплен первый пьезомодуль, соединенный вторым концом с первым концом направляющей, сопряженной с подвижной кареткой, отличающийся тем, что в него введен кронштейн, закрепленный на основании и сопряженный со вторым концом направляющей.
2. Устройство по п.1, отличающееся тем, что кронштейн сопряжен со вторым концом направляющей посредством винта.
3. Устройство по п.1, отличающееся тем, что кронштейн сопряжен со вторым концом направляющей посредством первого пружинного элемента.
4. Устройство по п.1, отличающееся тем, что кронштейн сопряжен со вторым концом направляющей посредством винта и первого пружинного элемента.
5. Устройство по п.1, отличающееся тем, что кронштейн сопряжен со вторым концом направляющей посредством второго пьезомодуля.
6. Устройство по п.5, отличающееся тем, что между вторым пьезомодулем и кронштейном расположен винт.
7. Устройство по п.5, отличающееся тем, что между вторым пьезомодулем и кронштейном расположен второй пружинный элемент.
8. Устройство по п.5, отличающееся тем, что между вторым пьезомодулем и кронштейном расположен винт и второй пружинный элемент.
9. Устройство по п.1, отличающееся тем, что поверхность направляющей, находящаяся во взаимодействии с подвижной кареткой, выполнена из поликора.
10. Устройство по п.1, отличающееся тем, что поверхность подвижной каретки, находящаяся во взаимодействии с направляющей, выполнена из поликора.
| RU 2006114992 А, 10.11.2007 | |||
| Трубопровод с двойными стенками | 1979 |
|
SU823738A1 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |

