Изобретение относится к устройствам механического перемещения объекта вдоль одной координаты. Оно может быть использовано, например, в сканирующем зондовом микроскопе (СЗМ) для сближения зонда и образца.
Известен линейный инерционный шаговый двигатель, содержащий основание, на котором первыми концами закреплены три пьезотрубки, на вторых концах которых установлены сферические опоры, расположенные с возможностью взаимодействия посредством направляющих с подвижной платформой [1].
Недостаток этого устройства заключается в том, что его нельзя использовать для вертикального перемещения объектов.
Известен также инерционный шаговый двигатель, содержащий основание, сопряженное первой V-образной направляющей с первой и второй гранями штока квадратного сечения, третьей и четвертой гранями соединенного с подпружиненным прижимом, имеющим вторую V-образную направляющую. На штоке закреплен пьезомодуль, соединенный с подвижной кареткой, установленной посредством третьей и четвертой V-образных направляющих на пятой и шестой V-образных направляющих основания [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток этого устройства заключается в том, что прижим может иметь люфты вдоль оси перемещения, что может приводить к нестабильности шага перемещения и соответственно снижению его точности.
Второй недостаток связан с тем, что пьезомодуль расположен внутри кинематической цепочки устройства, что увеличивает возможность его разрушения и исключает замену.
Технический результат предлагаемого изобретения заключается в повышении точности и перемещения, а также в повышении надежности устройства.
Указанный технический результат достигается тем, что в инерционном двигателе, содержащем основание, пьезомодуль, шток, сопряженный с V-образной направляющей, подвижную каретку и прижим, пьезомодуль первым концом закреплен на основании, а вторым соединен со штоком, имеющим треугольный профиль с первой, второй и третьей гранями, при этом каретка содержит V-образную направляющую, сопряженную с первой и второй гранями штока, а прижим выполнен в виде плоской пружины, закрепленной на подвижной каретке и первой плоскостью сопряженной посредством вкладыша с третьей гранью штока.
Существует вариант, в котором плоская пружина второй плоскостью сопряжена с первым концом витой цилиндрической пружины, вторым концом сопряженной с подвижной кареткой с возможностью поджима.
Возможен вариант, где длина граней штока в направлении перемещения больше длины V-образной направляющей подвижной каретки.
Возможен также вариант, в котором глубина микроканавок трущихся поверхностей штока, подвижной каретки и вкладыша должна быть в пределах 10-50 мкм, а сами микроканавки расположены таким образом, что их длина до ребер поверхностей минимальна.
На фиг.1 изображен инерционный двигатель - вид сверху.
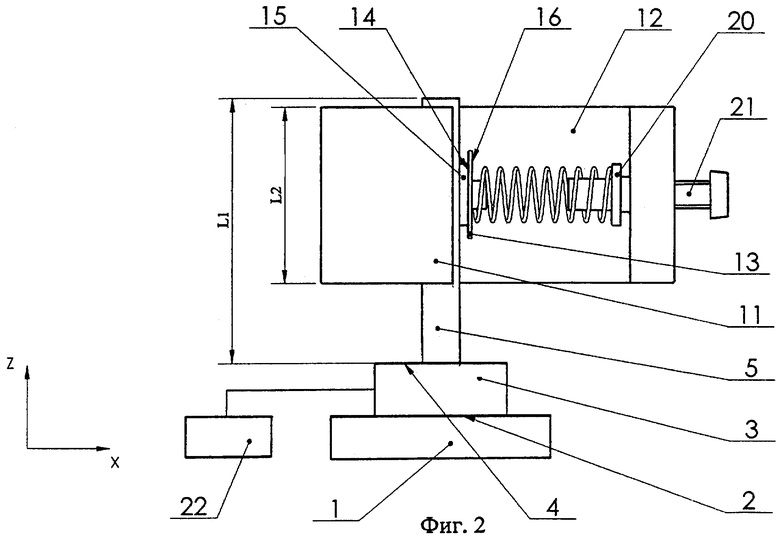
На фиг.2 - то же, вид сбоку.
Инерционный двигатель содержит основание 1 (фиг.1, 2), на котором первым концом 2 закреплен пьезомодуль 3, вторым концом 4 соединенный со штоком 5, имеющим треугольный профиль с первой 6, второй 7 и третьей 8 гранями. На штоке 5 установлена подвижная каретка 9 с V-образной направляющей 10, сопряженной с первой 6 и второй 7 гранями. Каретка 9 может содержать корпус 11 (при этом V-образная направляющая выполнена в корпусе 11) и скобу 12, в которой закреплена плоская пружина 13, первой плоскостью 14 сопряженная посредством вкладыша 15 с третьей гранью 8. Второй плоскостью 16 пружина 13 может быть сопряжена с первым концом 17 цилиндрической пружины 18, второй конец 19 которой взаимодействует со скобой 12 через переходник 20 с возможностью поджима пружины 18 посредством винта 21. При этом жесткость цилиндрической пружины 18 должна быть больше жесткости плоской пружины 13. Пьезомодуль 3 подключен к блоку управления 22.
Следует заметить, что длина L1 штока 5 должна быть больше длины l2 корпуса 11 на величину хода каретки или больше.
Глубина микроканавок трущихся поверхностей штока 5, V-образной направляющей 10 и вкладыша может быть в пределах 10-50 мкм, что обеспечивается диаметром абразивных зерен порядка 20 мкм.
Расположение микроканавок должно быть таким, чтобы их длина до ребер трущихся поверхностей штока 5, V-образной направляющей 10 корпуса 11 и вкладыша 15 была минимальной. Это обеспечивает предварительное удаление жидкости и продуктов адгезии с трущихся поверхностей в том случае, когда устройство помещают в вакуумную камеру, откачивают ее и создают низкую температуру. Как известно из вакуумной техники, чем длиннее и уже закрытые каналы, тем сложнее и дольше происходит откачка газов. Результатом недостаточной откачки может быть залипание трущихся поверхностей вследствие смерзания их при низких температурах. В случае выполнения вкладыша 15 круглым расположение микроканавок на нем может быть любым.
Инерционный двигатель работает следующим образом. От блока управления 22 подают несимметричное пилообразное напряжение на пьезомодуль 3. Шток 5 при этом осуществляет возвратно-поступательное перемещение по координате Z с различными скоростями в разных направлениях. Результатом этого является инерционное проскальзывание каретки 9 по граням 6, 7 и 8 в одном направлении и перемещение вместе со штоком 5 в другом. Таким образом, каретка 9 может перемещаться по штоку 5 в двух направлениях при изменении формы управляющего напряжения. Более подробно режим инерционного перемещения см. в [1, 2, 3, 4].
Данный двигатель в зависимости от расположения штока 5 можно использовать для перемещения каретки 9 как в вертикальном (Z), так и в горизонтальном (X, Y) направлениях.
Следует заметить, что если последовательно собрать три таких двигателя с расположением штоков 5 по координатам X, Y и Z, то в результате может получиться трехкоординатный инерционный двигатель.
Использование пьезомодуля, первым концом закрепленного на основании, а вторым соединенного со штоком, имеющим треугольный профиль с первой, второй и третьей гранями, повышает надежность устройства и точность его перемещения. Это происходит из-за того, что пьезомодуль расположен вне блока перемещения (каретки) и не имеет по сравнению с прототипом пространственных ограничений на сборку, наладку и размещение.
Использование плоской пружины, закрепленной на подвижной каретке и первой плоскостью сопряженной посредством вкладыша с третьей гранью за счет уменьшения смещений прижима по координате Z, повышает точность и надежность перемещения, особенно при смене направления перемещения.
Применение витой цилиндрической пружины с поджимом позволяет регулировать силу трения в трущихся поверхностях и позволяет выбирать оптимальные режимы, повышает точность перемещения и стабильность величины шагов.
Использование длины граней штока, превышающей длину V-образной направляющей подвижной каретки, позволяет за счет постоянства длины соприкасающихся поверхностей стабилизировать силу трения на всем перемещении подвижной каретки и повышает точность перемещения.
Выполнение микроканавок на трущихся поверхностях штока и подвижной каретки и вкладыша с глубиной в пределах 10-50 мкм исключает их залипание и повышает надежность работы устройства.
Минимальная длина микроканавок на трущихся поверхностях обеспечивает возможность удаления жидкости с них в случае использования двигателя в криогенных вакуумных системах, исключает их залипание в результате замерзания жидкости и соответственно повышает стабильность шага, точность перемещения и надежность устройства.
ЛИТЕРАТУРА
1. Патент RU 2152103, 1996.
2. Патент ЕР 0823738, 1997.
3. Зондовая микроскопия для биологии и медицины. В.А.Быков и др., Сенсорные системы, т.12, №1, 1998 г., с.99-121.
4. Сканирующая туннельная и атомносиловая микроскопия в электрохимии поверхности. Данилов А.И., Успехи химии, 64 (8), 1995 г., с.818-833.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2347300C2 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2461098C2 |
| УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2537363C2 |
| КРЕСЛО ЛЕТНОГО ЭКИПАЖА С ЧАШКОЙ ПОД ПАРАШЮТ (ВАРИАНТЫ) | 2014 |
|
RU2583102C2 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С СОСТАВНОЙ ОПОРОЙ | 2016 |
|
RU2635341C2 |
| КРЕСЛО ЛЕТНОГО ЭКИПАЖА (ВАРИАНТЫ) | 2014 |
|
RU2620443C2 |
| СПОСОБ КРЕПЛЕНИЯ ПЬЕЗОЭЛЕМЕНТА В ИНЕРЦИОННОМ ПЬЕЗОЭЛЕКТРИЧЕСКОМ ДВИГАТЕЛЕ И ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2015 |
|
RU2587984C1 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| ШИРОКОПОЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2001 |
|
RU2210730C2 |
Изобретение относится к устройствам механического перемещения объекта вдоль одной координаты. Инерционный двигатель содержит основание, пьезомодуль, шток, сопряженный с V-образной направляющей, подвижную каретку и прижим. Пьезомодуль первым концом закреплен на основании, а вторым соединен со штоком, имеющим треугольный профиль с первой, второй и третьей гранями. Каретка содержит V-образную направляющую, сопряженную с первой и второй гранями штока, а прижим выполнен в виде плоской пружины, закрепленной на подвижной каретке и первой плоскостью сопряженной посредством вкладыша с третьей гранью штока. Техническим результатом является повышение точности и надежности устройства. 4 з.п. ф-лы, 2 ил.
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| Модулятор света | 1988 |
|
SU1550457A1 |
| Сканирующий туннельный микроскоп | 1988 |
|
SU1531181A1 |
| Трубопровод с двойными стенками | 1979 |
|
SU823738A1 |
| Способ изготовления трубных плетей | 1973 |
|
SU640829A1 |
| US 5157256, 20.10.1992. | |||

