Изобретение относится к устройствам механического перемещения объектов вдоль одной координаты. Оно может быть использовано, например, в сканирующем зондовом микроскопе (СЗМ) для сближения зонда и образца.
Известен линейный инерционный шаговый двигатель, содержащий основание, на котором первыми концами закреплены три пьезотрубки, на вторых концах которых установлены сферические опоры, расположенные с возможностью взаимодействия посредством направляющих с подвижной платформой [1].
Недостаток этого устройства заключается в том, что из-за одностороннего расположения опор относительно платформы его нельзя использовать для вертикального перемещения объектов.
Известен также инерционный шаговый двигатель, содержащий основание с закрепленным на нем пьезомодулем, соединенным со стержнем квадратного сечения, на котором установлена каретка с возможностью перемещения вдоль оси стержня, состоящего из первого элемента с первыми V-образными направляющими и второго элемента со вторыми V-образными направляющими, при этом первые и вторые V -образные направляющие сопряжены со стержнем квадратного сечения и подпружинены относительно него, а также блок управления, подключенный к пьезомодулю [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток этого устройства заключается в том, что элементы каретки не зафиксированы друг относительно друга вдоль оси перемещения, что может приводить к нестабильности шага перемещения и соответственно повышению погрешности, а также снижению надежности работы в экстремальных условиях: таких как высокий вакуум и низкие температуры.
Второй недостаток связан с отсутствием средств, позволяющих бороться с эффектом залипания в высоком вакууме (из-за увеличения коэффициента трения трущихся поверхностей), а также замерзанием трущихся поверхностей при низких температурах. Это также снижает надежность работы и приводит к нестабильности шага перемещения.
Технический результат предлагаемого изобретения заключается в повышении стабильности шага перемещения, а также в повышении надежности устройства.
Указанный технический результат достигается тем, что в инерционном шаговом двигателе, содержащем основание, с закрепленным на нем пьезомодулем, соединенным со стержнем квадратного сечения, на котором установлена с возможностью перемещения вдоль оси стержня каретка, состоящая из первого элемента с первыми V-образными направляющими и второго элемента со вторыми V-образными направляющими, при этом первые и вторые V-образные направляющие сопряжены со стержнем квадратного сечения и подпружинены относительно него, а также блок управления, подключенный к пьезомодулю, первый и второй элементы каретки дополнительно соединены плоскими пружинами, расположенными параллельно оси перемещения каретки.
Существует вариант, в котором шаговый двигатель снабжен датчиком движения каретки и модулем запуска движения каретки.
Существует также вариант, в котором в шаговый двигатель введены датчики крайнего положения каретки.
Возможен вариант, где закрепление пьезомодуля на основании и стержне осуществлено посредством соответственно четырех первых захватов, выполненных в основании, и четырех вторых захватов, выполненных на стержне.
Возможен также вариант, в котором на каретке или основании закреплен фиксатор, расположенный с возможностью взаимодействия с основанием или кареткой соответственно.
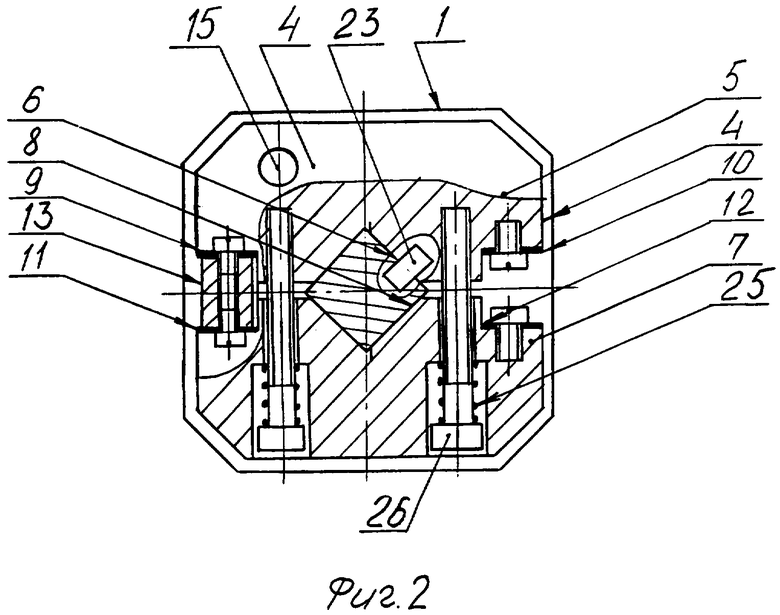
На фиг.1 изображен шаговый двигатель - вид сбоку.
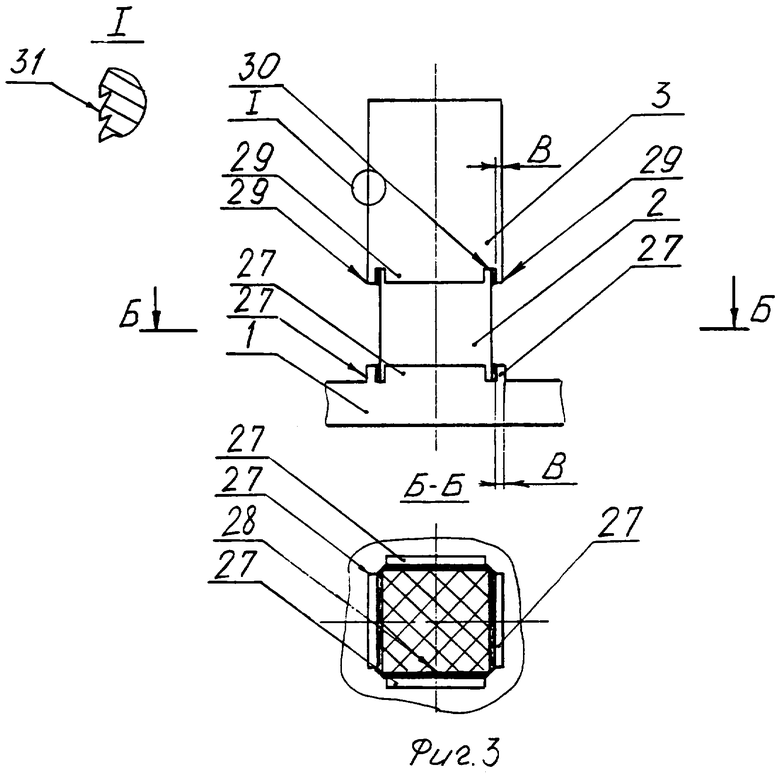
На фиг.2 - шаговый двигатель - вид сверху.
На фиг.3 показано крепление пьезомодуля к основанию и стержню.
На фиг.4 изображены захваты шагового двигателя.
Шаговый двигатель содержит основание 1 (фиг.1, фиг.2) с закрепленным на нем пьезомодулем 2, соединенным со стержнем 3 квадратного сечения. На стержне 3 установлена каретка 4, состоящая из первого элемента 5 с первыми V-образными направляющими 6 и второго элемента 7 со вторыми V-образными направляющими 8. При этом V-образные направляющие 6 и 8 сопряжены со стержнем 3 [3]. На элементах 5 и 7 закреплены плоские пружины 9, 10, 11 и 12, соединенные между собой переходниками 13. Важно, чтобы плоские пружины 9, 10, 11 и 12 помимо возможности функционального изгиба имели также возможность кручения. Для этого необходимо, чтобы при размере рабочих частей А около 5 мм толщина пружин была порядка 0,1 мм. Это может быть осуществлено также за счет выполнения в рабочих частях пружин - шарниров (не показано). Благодаря кручению пружин обеспечивается более равномерный прижим трущихся поверхностей.
На основании 1 установлен шток 14, на котором закреплен ограничитель 15, расположенный в отверстии 16, например, первого элемента 5. При этом ограничитель 15 имеет возможность взаимодействия с кареткой 4. Пьезомодуль 2 подключен к блоку управления 17. Шаговый двигатель содержит датчик движения, состоящий из неподвижной части 18, закрепленной, например, на основании 1, и подвижной части 19, установленной на каретке 4. При этом они (части) подключены к модулю фиксации движения 20, входящему в состав блока 17. Датчик движения может быть выполнен в виде емкостного или индуктивного измерителя перемещений (см., например, [4, 5, 6]). В блок 17 введен модуль запуска движения 21, выполненный в виде, например, генератора синусоидального напряжения с регулируемой частотой и амплитудой [6, 7].
Существует вариант, в котором в шаговый двигатель введены, например, контактные датчики 22 и 23 крайнего положения [6] каретки 4, а в блок управления 17 - модуль отключения питающего напряжения 24, выполненный в виде электронного или электромеханического прерывателя питающего напряжения [6].
Элементы 5 и 7 могут быть дополнительно подпружинены друг относительно друга пружинами 25, сопряженными с винтами 26.
Возможен вариант закрепления пьезомодуля 2 на основании 1, используя четыре первых захвата 27 (фиг.3). Толщина В этих захватов может быть 0,1-0,2 мм, а пьезомодуль 2 закреплен посредством первого клеевого шва 28.
Закрепление стержня 3 на пьезомодуле 2 может быть осуществлено с использованием четырех вторых захватов 26 и второго клеевого шва 30.
Существует вариант, в котором коэффициент трения между стержнем 3 и V-образными направляющими 6 и 8 имеют различные значения в разных направлениях перемещения каретки 4. Это достигается путем направленного формирования микрошероховатостей 31 на их поверхностях.
Существует также вариант, в котором, например, на основании 1 закреплен фиксатор, выполненный в виде упоров 32 (фиг.4) с фрикционными накладками 33, закрепленными на упругих элементах 34. При этом фрикционные накладки 33 сопряжены с первым 5 и вторым 7 элементами.
Устройство работает следующим образом. От блока управления 17 подают пилообразное напряжение на пьезомодуль 1, который изменяет свои линейные размеры в разных направлениях по оси Z с разными скоростями. При этом каретка 4 двигается по стержню 3 вдоль оси Z в том или ином направлении. Подробнее инерционное перемещение см. в [8, 9]. В том случае, если датчик движения не фиксирует перемещения каретки 4, включают модуль 21, который, раскачивая каретку 4 на резонансной частоте, запускает ее перемещение. При достижении каретки 4 одного из крайних положений, что фиксируется датчиками 22 и 23, модуль 24 отключает питающее напряжение.
Для регулировки усилия взаимодействия между V-образными 6 и 8 направляющими и стержнем 3 используют плоские пружины 9 и 10, а также пружины 25.
Для увеличения усилия уменьшают толщину переходников 13, либо подтягивают винты 25.
Подбор необходимого коэффициента трения осуществляют направленным шлифованием поверхностей V-образных направляющих 6 и 8, а также стержня 9. После этого внедряют в микровпадины этих поверхностей графитовую смазку.
При работе шагового двигателя с использованием фиксатора важным моментом является регулировка упоров 32. Эта регулировка может быть осуществлена путем подгибов упругих элементов 34. При этом необходимо добиться, чтобы при сохранении возможности перемещения были минимальными нефункциональные колебания каретки 4 на стержне 3 в плоскости, перпендикулярной координате Z.
Использование плоских пружин стабилизирует положение первого и второго элементов друг относительно друга по оси Z, что повышает стабильность шага перемещения каретки и надежность работы устройства.
Снабжение шагового двигателя датчиком движения каретки, модулем запуска движения каретки и датчиками крайнего положения каретки повышает надежность работы устройства.
Использование захватов на основании и стержне для закрепления пьезомодуля повышает надежность и долговечность использования шагового двигателя.
Применение фиксатора, расположенного с возможностью взаимодействия с основанием или кареткой, уменьшает нефункциональные колебания каретки, что уменьшает погрешность перемещения.
ЛИТЕРАТУРА
1. Патент RU 2152103, 1996.
2. Googl, Attocube systems AG Inertial motor Driving controller ANC 150.
3. Патент ЕР 0823738, 1997.
4. Г.Ф. Афанасьев, А.Н. Еремин, Повышение точности и разрешающей способности емкостных и индуктивных датчиков. Журнал «Датчики и системы», №6, с.17-19, 2003 г.
5. Д.И. Агейкин, Е.Н. Костина, Н.Н. Кузнецова, Датчики контроля и регулирования. М., 1965 г.
6. В.А. Долгов, А.В. Кедин, Электронные датчики для автоматических систем контроля. М., 1968 г.
7. Г.Я. Мирский, «Электронные измерения». М., «Радио и связь», 439 с., 1986 г.
8. Зондовая микроскопия для биологии и медицины. В.А.Быков и др., Сенсорные системы, т.12, №1, 1998 г., с.99-121.
9. Сканирующая туннельная и атомно-силовая микроскопия в электрохимии поверхности. Данилов А.И., Успехи химии, 64 (8), 1995 г., с.818-833.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2461098C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| УСТРОЙСТВО ПОДВИЖКИ | 2016 |
|
RU2664783C2 |
| УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2537363C2 |
| Устройство для подачи ленточного материала в рабочую зону вырубного штампа | 1990 |
|
SU1759507A1 |
| Устройство для укладки кольцевых изделий в тару | 1986 |
|
SU1406031A1 |

Изобретение относится к устройствам механического перемещения объектов вдоль одной координаты. Оно может быть использовано, например, в сканирующем зондовом микроскопе (СЗМ) для сближения зонда и образца. Технический результат заключается в повышении стабильности шага перемещения, а также в повышении надежности устройства. Инерционный шаговый двигатель содержит основание с закрепленным на нем пьезомодулем, соединенным со стержнем квадратного сечения, на котором установлена с возможностью перемещения вдоль оси стержня каретка, состоящая из первого элемента с первыми V-образными направляющими и второго элемента со вторыми V-образными направляющими. При этом первые и вторые V-образные направляющие сопряжены со стержнем квадратного сечения и подпружинены относительно него, а также блок управления, подключенный к пьезомодулю первый и второй элементы каретки дополнительно соединены плоскими пружинами, расположенными параллельно оси перемещения каретки. 5 з.п. ф-лы, 4 ил.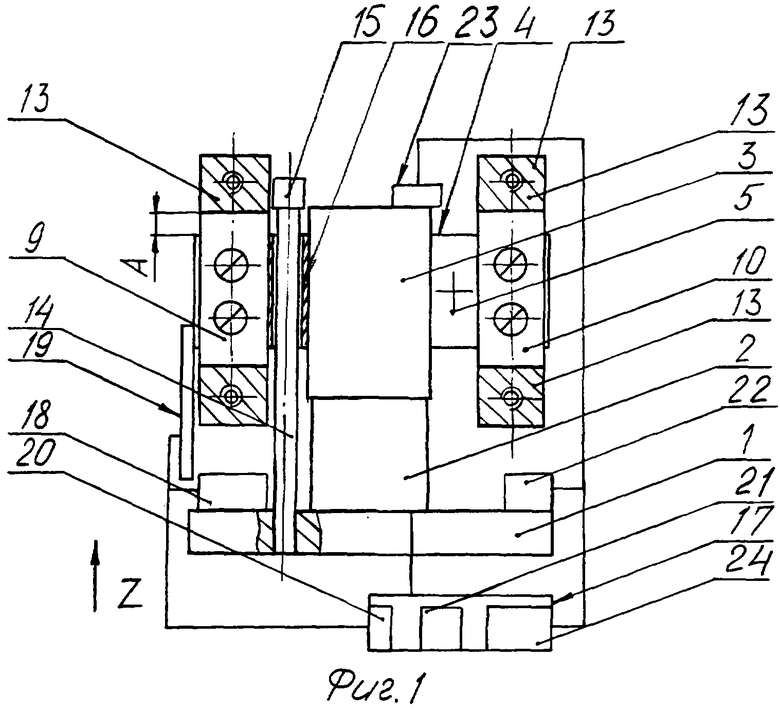
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| Модулятор света | 1988 |
|
SU1550457A1 |
| Трубопровод с двойными стенками | 1979 |
|
SU823738A1 |
| Способ изготовления трубных плетей | 1973 |
|
SU640829A1 |

