Настоящее изобретение относится к системе управления двустороннего действия с ограничением бокового отклонения оси транспортного средства, управляемого посредством направляющего рельса, установленного на основании.
Изобретение относится к дорожным транспортным средствам, движение которых направляется посредством направляющего рельса, установленного на основании, в частности к городским пассажирским транспортным средствам.
Этот тип транспортных средств содержит на каждой из своих дорожных осей управляющее устройство, которое содержит одну или несколько штанг, следующих за направляющим рельсом, и направляет ось посредством управляющего устройства.
Так, например, известны управляющие устройства, содержащие одинарную или двойную штангу, соединенную с осью и прилегающую к направляющему рельсу, при этом на конце она содержит пару ходовых роликов, установленных V-образно, каждый из которых движется по противоположным сторонам направляющего рельса.
Однако подобный тип транспортных средств чаще всего движется по выделенному пути попеременно в обоих направлениях движения без осуществления поворотного маневра. Следовательно, управление должно осуществляться в обоих направлениях движения транспортного средства.
В этом случае ранее упомянутое управляющее устройство для каждой из осей должно дублироваться ему подобным, но действующим в противоположном направлении, в результате чего образуется система управления двустороннего действия. Каждое из управляющих устройств системы управления двустороннего действия применяется поочередно, в зависимости от направления движения транспортного средства.
Для того чтобы обеспечить точное и надежное управление транспортным средством, управляющее устройство должно присоединяться к соответствующей оси так, чтобы передавать изменения направления, а также правильное положение.
Если два противоположно расположенных управляющих устройства системы управления двустороннего действия выполнены жесткими для того чтобы направлять ось вне зависимости от направления движения транспортного средства, тогда получаем гиперстатическую систему управления, на которую воздействуют весьма значительные боковые напряжения, особенно на кривых пути, в случае бокового ветра или в случае буксования на скользкой почве. Следовательно, система управления должна иметь необходимые параметры, чтобы выдерживать подобные боковые напряжения.
Однако шины, которыми оснащаются транспортное средство, могут принимать на себя мягко и без изменений подобные боковые напряжения. Действительно на неуправляемых транспортных средствах именно шины в основном подвергаются действию этих напряжений. Например, при поворотах они подвергаются боковым ускорениям, приводящим к временным деформациям их боковых поверхностей.
Целью изобретения является создание системы управления двустороннего действия, которая не подвергается значительным боковым напряжениям, при этом большая часть которых гасится шинами транспортного средства. Управляющие устройства, не подвергающиеся значительным боковым напряжениям, могут тогда иметь более легкую конструкцию без значительных ограничений по размерам.
Для этого каждое управляющее устройство системы управления двустороннего действия по данному изобретению имеет два состояния: состояние управления - жесткое состояние и состояние свободного колебания - свободное состояние, которые устройство принимает попеременно в соответствии с направлением движения транспортного средства.
Таким образом, в зависимости от направления движения транспортного средства, управляющее устройство, установленное перед осью, служит направляющим модулем и имеет жесткую конфигурацию, в результате чего обеспечивается управление транспортным средством. Управляющее устройство, находящееся в задней части, отключено и находится в свободной конфигурации. В этом случае устройство становится пассивным следящим модулем, не влияющим на управление, допускающим боковое смещение оси, особенно в случае поворота или скольжения под воздействием чрезвычайных нагрузок, например.
С другой стороны, управляемые транспортные средства, а в частности городские транспортные средства общего пользования должны соответствовать габаритам, которые определены максимальными размерами, что позволяет выигрывать место в узких проездах и легко адаптироваться проезжей части, местам погрузки/выгрузки, местам стоянки, тротуарам, уличному оборудованию и любому другому оборудованию, предусмотренному поблизости.
В некоторых обстоятельствах, например при наличии гололеда или при сильном боковом ветре, шины утрачивают свое сцепление и выходят за максимально допустимые габариты.
Другой целью изобретения является создание системы управления двустороннего действия, которая ограничивает боковое отклонение оси при помощи нескольких упоров, в пределах разрешенного диапазона, соответствующего соблюдаемым габаритам. Таким образом, допускается некоторое боковое отклонение, до максимально углового отклонения между осью и следящим модулем, который следует за тем же рельсом, установленным на основании.
В целях избежания слишком сильного столкновения с упорами ограничения отклонения предлагаемая система управления двустороннего действия может содержать средство амортизации бокового отклонения.
Для достижения указанных выше целей по данному изобретению предусматривается система управления двустороннего действия для одной оси транспортного средства, направляемой посредством рельса, установленного в основании, а в частности для городского транспортного средства общего пользования.
Предлагаемая система управления содержит два управляющих устройства, соединенных с осью и размещенных друг напротив друга по обе стороны от оси, и каждое из которых содержит направляющую штангу, одинарную или двойную, направленную к направляющему рельсу и несущую по меньшей мере один направляющий ролик, находящийся в зацеплении с направляющим рельсом.
Каждое из таких устройств имеет два состояния: жесткое состояние, позволяющее направлять ось и свободное состояние, допускающее боковое отклонение, служащие поочередно в соответствии с направлением движения транспортного средства, впереди расположен направляющий модуль - жесткое состояние, а сзади расположен следящий модуль - свободное состояние.
В соответствии с изобретением каждое управляющее устройство содержит:
- деформируемое связующее звено между осью и направляющей штангой, допускающее за счет его способности к деформации боковое отклонение оси по отношению к направляющему рельсу; и
- силового цилиндра с двумя противоположными независимыми штоками, имеющими два характерных положения: положение «штоки выпущены», которое переводит управляющее устройство в жесткое состояние, при этом оба штока максимально выпущены и блокируют деформируемое связующее звено так, что образуется жесткое связующее звено между осью и направляющей штангой для направления оси, чтобы обеспечить управление, и положение «штоки убраны», которое переводит управляющее устройство в свободное состояние, при этом оба штока максимально убраны и не оказывают воздействия на деформируемое связующее звено, допускающее боковое отклонение.
Предпочтительно предлагаемая система управления двустороннего действия имеет несколько упоров, ограничивающих боковое отклонение.
Преимущественно система может оснащаться средством амортизации бокового отклонения.
В соответствии с одним из вариантов осуществления изобретения система управления двустороннего действия может оснащаться поворотной пластиной, соединенной с осью жестким образом или через шарнирное соединение, на которой смонтированы оба управляющих устройства одно напротив другого.
Предпочтительно деформируемое связующее звено предлагаемой системы управления содержит систему шарнирных тяг.
Предпочтительно система шарнирных тяг представляет собой систему шарнирных тяг, соединенных подвижно одна с другой, при этом их свободные концы шарнирно присоединяются к оси или поворотной пластине таким образом, что система шарнирных тяг образует с осью или пластиной многоугольник, в частности трапецию или параллелограмм, деформируемый в основном в горизонтальной плоскости.
Другие характеристики и преимущества изобретения будут понятны из дальнейшего подробного описания, выполненного со ссылками на прилагаемый графический материал.
На фиг.1 изображен схематический вид предлагаемой системы управления двустороннего действия, установленной на оси транспортного средства, находящейся в обычном положении движения по прямому участку пути;
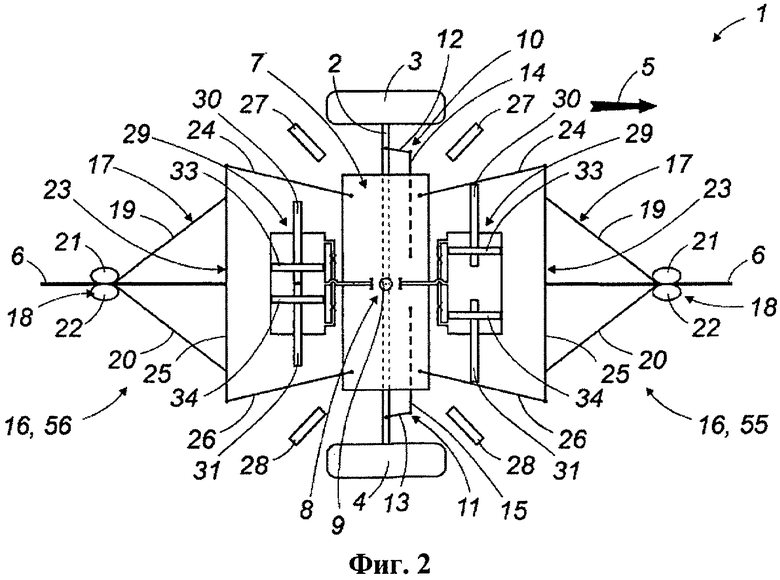
на фиг.2 изображен вид, подобный виду на фиг.1, соответствующий перемещению транспортного средства в обратном направлении;
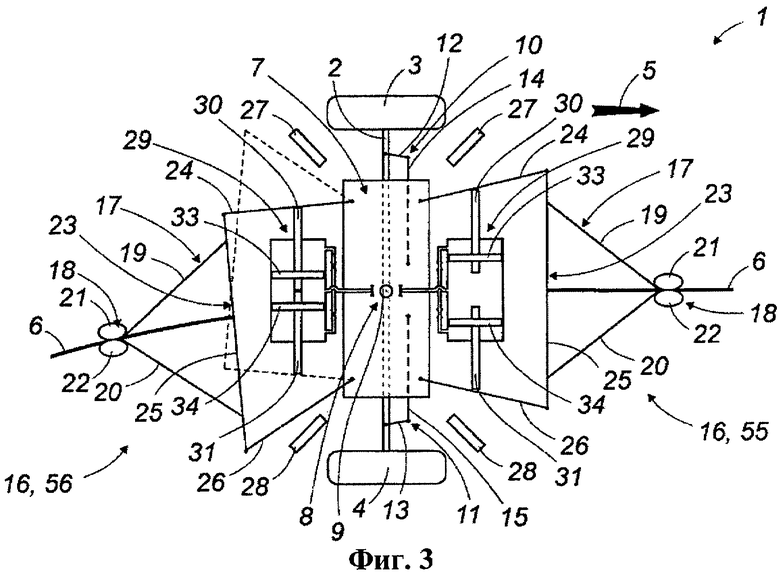
на фиг.3 изображен схематический вид системы двустороннего действия согласно фиг.2 в положении бокового отклонения, например, на кривой пути;
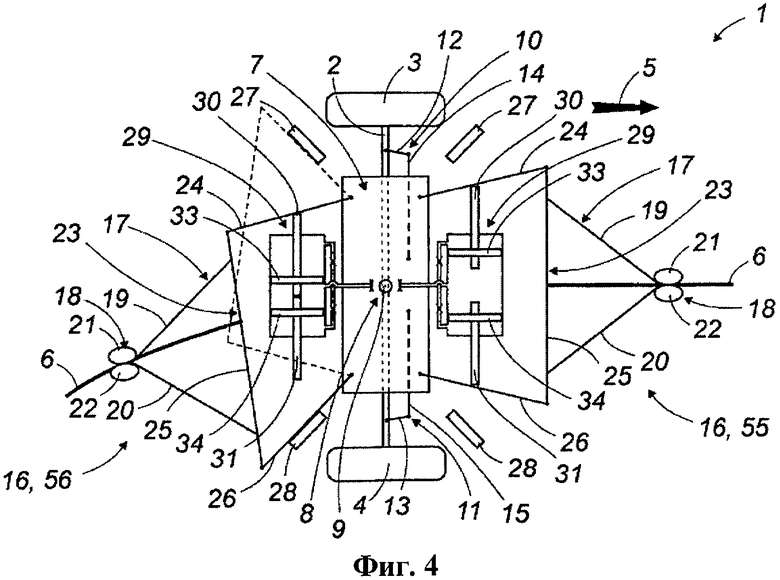
на фиг.4 изображен схематический вид системы управления двустороннего действия согласно фиг.2 в положении максимально допустимого бокового отклонения;
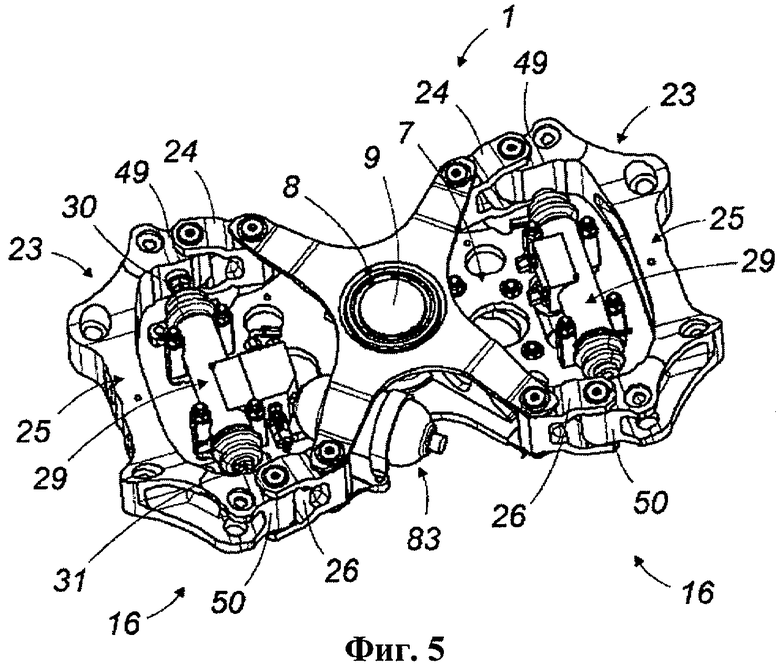
на фиг.5 изображен общий вид центральной части системы управления двустороннего действия в соответствии с предпочтительным вариантом осуществления изобретения;
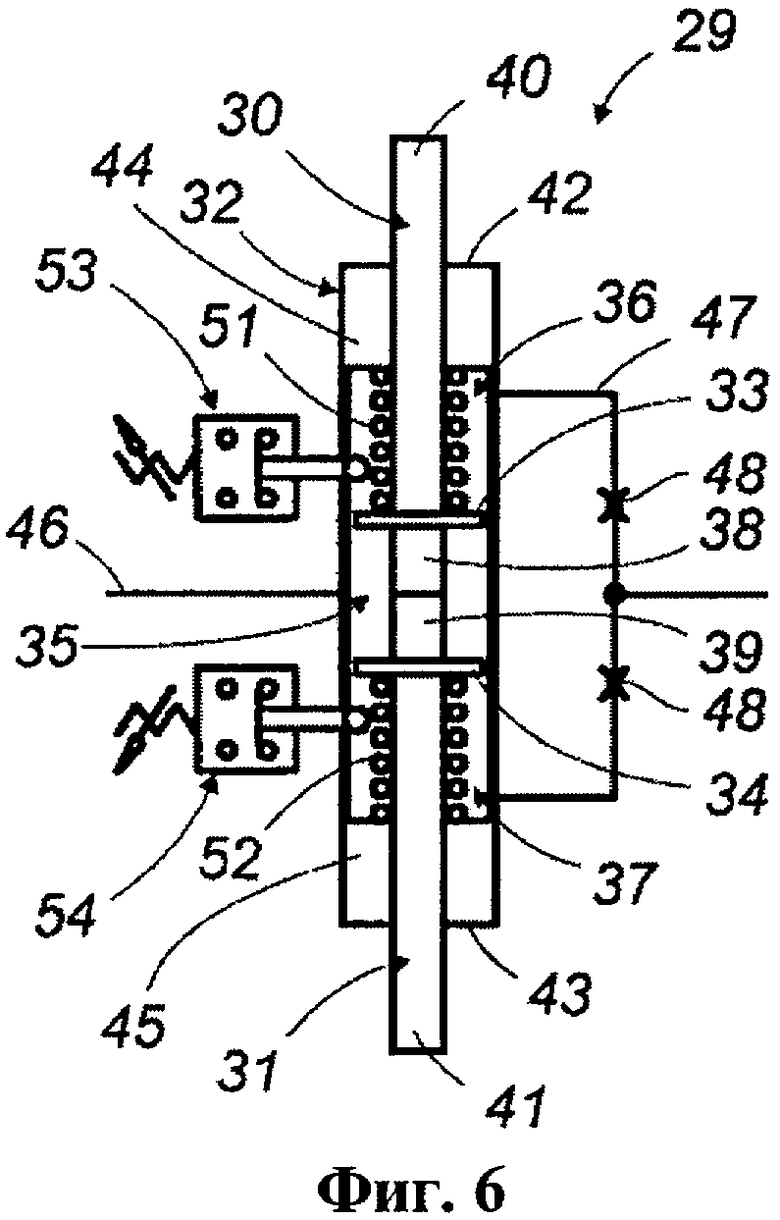
на фиг.6 изображен схематический вид силового цилиндра с двумя штоками предлагаемой системы управления в положении «штоки убраны»;
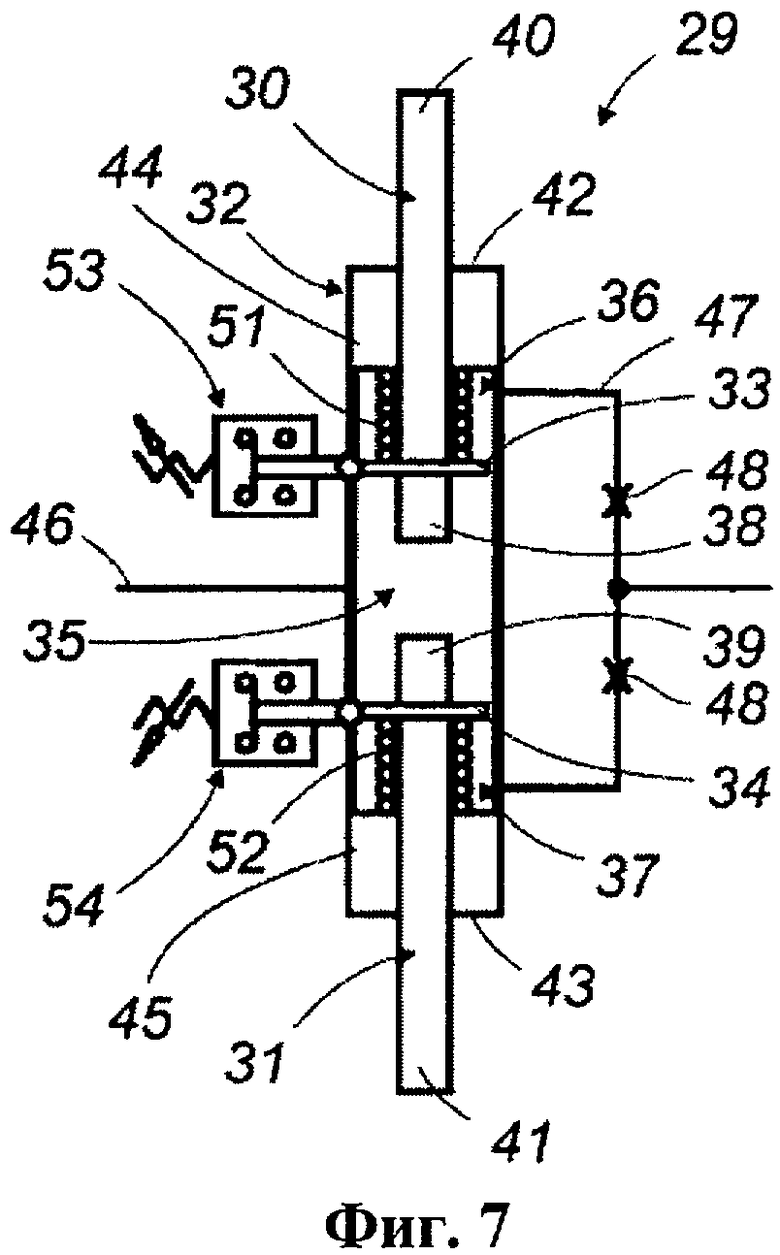
на фиг.7 изображен схематический вид силового цилиндра с двумя штоками предлагаемой системы управления в положении «штоки выпущены»; и
на фиг.8 изображена упрощенная гидравлическая схема одного варианта осуществления предлагаемой системы управления двустороннего действия оси транспортного средства.
Предлагаемая система управления двустороннего действия далее будет подробно описана со ссылками на фиг.1-8. Эквивалентные элементы, представленные на различных фигурах, имеют одинаковые номера ссылок. Так как оба управляющих устройства в основном идентичны, то их общие элементы имеют одинаковые номера ссылок.
По ходу данного описания понятия передняя часть и задняя часть будут даваться в зависимости от направления движения транспортного средства. Очевидно, что данная ориентировка может быть изменена на противоположную в случае изменения направления движения транспортного средства.
На фиг.1-4 изображены схематически типичные положения предлагаемой системы управления двустороннего действия 1.
Система управления 1 предназначена для направления оси 2, содержащей два колеса 3 и 4 с шинами, дорожного транспортного средства с направленным перемещением, а именно дорожного транспортного средства общественного транспорта.
В изображенном примере перемещение дорожного транспортного средства происходит в направлении стрелки 5 вдоль направляющего рельса 6 на основании.
Как будет пояснено далее и как видно на фиг.1 и 2, предлагаемая система управления 1 является двустороннего действия и позволяет в равной степени управлять дорожным транспортным средством в обоих направлениях движения.
Преимущественно направляющий рельс 6 является расположенным на основании по центру относительно дорожного транспортного средства. Тем не менее, специалист в данной области техники может легко приспособить предлагаемую систему управления к другому типу направляющего рельса, а в частности к двум направляющим рельсам на основании.
В случае оси 2 с поворачиваемыми колесами система управления преимущественно содержит поворотную пластину 7, которая соединяется с осью транспортного средства 2 через шарнирное соединение 8, которое представлено схематически в виде центрального соединения 9.
Как изображено, вращательное движение передается колесам 3 и 4 при помощи рулевых тяг с каждой стороны, соответственно 10 и 11, соединенных через шарнирное соединение с одной стороны с осью 2 вблизи соответствующего колеса 3 или 4, а с другой стороны с поворотной пластиной 7, причем каждая рулевая тяга 10, 11 содержит соответственно рулевой рычаг 12, 13 и управляющую тягу 14, 15, которые соединены друг с другом шарниром.
В случае неподвижной оси (не показана) поворотная пластина 7 устанавливается неподвижной по отношению к оси или вообще может отсутствовать.
Предлагаемая система управления 1 содержит два управляющих устройства 16, преимущественно идентичных, расположенных по обе стороны оси транспортного средства 2.
Управляющие устройства 16 устанавливаются на поворотной пластине 7 и посредством пластины 7 соединяются с осью 2 или же могут непосредственно крепиться к оси 2, когда система не содержит поворотной пластины 7.
Каждое из управляющих устройств 16 имеет направляющую штангу 17, которая проходит к направляющему рельсу 6 и имеет на конце по меньшей мере один ходовой ролик 18 для качения по направляющему рельсу 6.
В изображенном предпочтительном варианте осуществления установлена двойная направляющая штанга 17, состоящая из двух спаренных звеньев 19 и 20, сходящихся к направляющему рельсу 6 и несущих на своем свободном конце пару ходовых роликов 18, соответственно 21 и 22, наклоненных в виде буквы V, каждый из которых катится по направляющей поверхности, образованной одной из боковых поверхностей направляющего рельса 6.
Само собой разумеется, что также возможны другие варианты, например направляющая штанга 17 может быть выполнена одинарной или ролики 18 могут отличаться по количеству и расположению.
Также, каждое управляющее устройство 16 содержит деформируемое связующее звено 23, установленное между осью 2 и направляющей штангой 17, а именно между поворотной пластиной 7 и направляющей штангой 17 в данном примере.
Связующее звено 23 предпочтительно выполняется в виде системы тяг, шарнирно соединенных одна за другой, свободные концы которых присоединяются через шарнирное соединение к оси 2 или поворотной пластине 7 таким образом, что система шарнирных тяг образует с ними деформируемый многоугольник в основном в горизонтальной плоскости.
В соответствии с предпочтительным вариантом осуществления, каждое управляющее устройство 16 содержит преимущественно три тяги, соединенные одна за другой, соответственно периферийную тягу 24, центральную тягу или траверсу 25 и периферийную тягу 26, обе периферийные тяги 24 и 26 выполнены преимущественно одинаковой длины и они более короткие, чем центральная тяга 25.
Свободные концы периферийных тяг 24 и 26 присоединяются при помощи шарнира к поворотной пластине 7 или непосредственно к оси 2 таким образом, что система тяг образует со стороной поворотной пластины 7 или с осью в основном в горизонтальной плоскости деформируемую трапецию или параллелограмм.
Направляющая штанга 17 присоединяется к системе тяг предпочтительно на уровне центральной тяги 25 и предпочтительно симметрично, когда она выполнена из двух спаренных звеньев 19 и 20.
Боковое отклонение оси 2 транспортного средства по отношению к направляющему рельсу 6 становится возможным из-за деформируемого характера в основном в горизонтальной плоскости связующего звена 23 между поворотной пластиной 7 и направляющей штангой 17 или более в общем случае между осью 2 и направляющей штангой 17.
Предпочтительно амплитуда отклонения ограничивается комплектом упоров, например, 27 и 28, в которые упирается связующее звено 23, когда оно достигает максимально допустимого отклонения в одном или другом направлении. Упоры, как изображено в графическом материале, имеются в количестве двух на каждое управляющее устройство 16, по одному на каждое крайнее положение связующего звена 23.
Размещение этих упоров определяется конструктивно в зависимости от характеристик пути и максимально допустимых характеристик для транспортного средства. Упоры могут располагаться как внутри, так и снаружи системы тяг и могут располагаться, например, на поворотной пластине 7 или на любом другом подходящем звене транспортного средства.
Кроме того, каждое управляющее устройство 16 имеет силовой цилиндр 29, предпочтительно гидравлический с двумя независимыми расположенными напротив друг друга штоками. Силовой цилиндр изображен отдельно и более подробно на фиг.6 и 7 в двух характерных положениях, а именно в положении «штоки убраны» на фиг.6 и в положении «штоки выпущены» на фиг.7.
Силовой цилиндр 29 содержит корпус 32, предпочтительно цилиндрической формы, внутри которого перемещаются два поршня 33 и 34, каждый из которых жестко соединен с одним из штоков 30 и 31 соответственно.
Внутренний объем корпуса 32 силового цилиндра делится таким образом на центральную камеру 35 и две кольцеобразные периферийные камеры 36 и 37, находящиеся соответственно между обеими и с обеих сторон поршней 33, 34.
Согласно предпочтительному варианту осуществления каждый из поршней 33, 34 монтируется на одном из штоков 30 и 31 и перемещается вместе с ним.
Каждый поршень 33 или 34 размещается на соответствующем штоке 30 или 31 таким образом, что часть штока выступает с каждой стороны поршня, предопределяя тем самым для каждого из штоков внутреннюю часть, соответственно 38 и 39, расположенную в центральной камере 35 силового цилиндра, и внешнюю часть, соответственно 40 и 41, находящуюся в соответствующей кольцеобразной периферийной камере 36 и 37 и выступающую за нее. Разумеется, возможны и другие равноценные варианты осуществления.
Внешняя часть 40 и 41 штоков 30 и 31 имеет большую длину, чем внутренняя часть 38, 39 и выступает из корпуса 32 силового цилиндра, пересекая с каждой стороны соответствующую периферийную перегородку 42, 43 корпуса 32 силового цилиндра.
Герметичность корпуса 32 силового цилиндра на этом уровне обеспечивается за счет элементов уплотнения, таких как 44 и 45, размещенных, например, за периферийными перегородками 42 и 43, обеспечивающими герметичное скольжение внешней части 40,41 штоков 30 и 31.
Центральная камера 35 силового цилиндра снабжается жидкостью через питающий трубопровод 46 контура, пример которого будет описываться далее со ссылкой на фиг.8.
В соответствии с предпочтительным вариантом осуществления изобретения кольцеобразные периферийные камеры 36 и 37 силового цилиндра 29 соединены по жидкости связующим трубопроводом 47, который связывает камеры друг с другом. Предпочтительно этот связующий трубопровод 47 имеет одно или несколько сужений 48, функция которых будет поясняться дальше.
Когда давление в центральной камере 35 превышает давление в кольцеобразных периферийных камерах 36 и 37, поршни 33 и 34 расходятся и перемещаются к периферийным перегородкам 42 и 43 корпуса 32, в результате чего внешние части 40, 41 штоков 30, 31 силового цилиндра выдвигаются до максимального положения, называемого «штоки выпущены» и в котором находится цилиндр 29, представленный на фиг.7, и передний цилиндр на фиг.1-4.
В этом положении свободный край внешней части 40, 41 штоков 30 и 31 прямо или непрямо блокирует связующее звено 23 таким образом, что образуется жесткое связующее звено между направляющей штангой 17 и поворотной пластиной 7 или осью 2.
Для того чтобы вызвать блокирование, свободный край внешней части 40, 41 штоков 30 и 31 выдвигается непосредственно для того, чтобы подтолкнуть одну или несколько тяг связующего звена 23, например две периферийных тяги 24 и 26, например, в варианте осуществления, изображенном на фиг.1-4, или периферийный выступ, соответственно 49, 50, центральной тяги 25, например, в варианте осуществления, изображенном на фиг.5.
Также блокирование может быть выполнено непрямо при помощи какого-либо промежуточного устройства, известного специалисту в данной области, например механического устройства, гидравлического устройства, электрического устройства, электронного устройства или подобного, управляющего блокированием связующего звена 23, при этом силовой цилиндр 29 находится в положении «штоки выпущены».
Преимущественно, когда поршни 33 и 34 расходятся и движутся в направлении периферийных перегородок 42, 43, каждый поршень сжимает пружину, соответственно 51 и 52, расположенную между поршнем и соответствующей периферийной перегородкой 42 или 43, или, как изображено на фигуре, между поршнем и элементом уплотнения 44 и 45, расположенным на дне соответствующей кольцеобразной периферийной камеры 36, 37.
Пружины 51 и 52 предназначены для плавного возвращения поршней 33 и 34 внутрь, к центру корпуса 32 силового цилиндра 29 и непосредственного воздействия на штоки 30 и 31.
Согласно предпочтительному варианту осуществления изобретения, управляющие устройства 16 также оснащаются одним или несколькими датчиками, такими как 53 и 54, которые определяют когда силовой цилиндр 29 находится в положении «штоки выпущены». Допускается также установка одного или нескольких дополнительных датчиков, определяющих другие положения силового цилиндра, в частности положение «штоки убраны».
Когда давление в центральной камере 35 ниже давления в кольцеобразных периферийных камерах 36 и 37, поршни 33 и 34 приближаются друг к другу, постепенно ослабляя напряжение возвратных пружины 51 и 52. Концы внешних частей 40, 41 штоков 30, 31, выступающих за периферийные перегородки 42 и 43 корпуса 32, постепенно уменьшаются до тех пор, пока не соприкоснутся внутренние части 38, 39 штоков 30 и 31, предопределяя тем самым минимальный размер центральной камеры 35. В этот момент силовой цилиндр 29 находиться в положении «штоки убраны», например силовой цилиндр 29, изображенный на фиг.6 и задний силовой цилиндр на фиг.1-4. Однако даже в этом положении концы штоков 30 и 31 продолжают выступать из корпуса 32 силового цилиндра 29.
В этом положении связующее звено 23 находится в свободном состоянии, а соответствующее управляющее устройство 16 имеет свободный ход, допуская тем самым боковое отклонение оси транспортного средства 2 относительно направляющего рельса 6.
Таким образом, управляющие устройства 16 имеют два положения, которые они могут принимать попеременно:
- жесткое состояние, соответствующее положению силового цилиндра 29 «штоки выпущены», в котором связующее звено 23 заблокировано и образуется жесткое связующее звено между поворотной пластиной 7 или осью 2 и направляющей штангой 17 для направления оси и таким образом обеспечения удовлетворительного управления;
- свободное состояние, соответствующее положению силового цилиндра 29 «штоки убраны», в котором связующее звено 23 является деформируемым в целом в горизонтальной плоскости, в результате чего обеспечивается боковое отклонение оси.
В зависимости от направления движения транспортного средства, показанного стрелкой 5 на фиг.1-4, управляющее устройство 16, расположенное спереди, действует как направляющий модуль 55, а управляющее устройство 16, размещенное сзади, действует как следящий модуль 56.
Для этого направляющий модуль 55 переходит в жесткое состояние посредством приведения силового цилиндра 29 в положение «штоки выпущены», а следящий модуль 56 переходит в свободное состояние посредством приведения силового цилиндра 29 в положение «штоки убраны». Разумеется, что эта конфигурация изменяется на противоположную при изменении направления движения транспортного средства.
Переход обоих модулей к соответствующей конфигурации в зависимости от направления движения транспортного средства может быть произведен вручную, например водителем, или автоматически, например специальным средством управления движением.
Контроль над жестким состоянием направляющего модуля 55, необходимый для обеспечения правильного управления транспортным средством, может осуществляться датчиками 53 и 54 модуля, которые определяют положение силового цилиндра 29 «штоки выпущены».
Как было указанно выше, следящий модуль 56 находится в свободном состоянии, которое допускает некоторое боковое отклонение. На фиг.3-4 изображена возможность такого отклонения на изогнутом участке направляющего рельса 6.
Максимальная амплитуда отклонения ограничивается положением упоров 27 и 28. Одно из крайних положений, соответствующее возможному максимальному отклонению с каждой стороны, изображено на фиг.4. В представленном положении деформируемое связующее звено 23, состоящее из тяг, упирается в упор 28, который противостоит дальнейшему отклонению.
Очевидно, что отклонение может происходить аналогичным образом к противоположной стороне. В этом случае деформируемое связующее звено 23 упирается в упор 27, как показано пунктирной линией на фиг.4.
Согласно предпочтительному варианту осуществления изобретения, система управления включает средство амортизации бокового отклонения для предотвращения опасных столкновений между деформируемым связующим звеном 23 и упорами 27 и 28. Подобная амортизация отклонения является дополнительной функцией силового цилиндра 29 управляющего устройства 16.
Для облегчения понимания читателем пример такой амортизации представлен на фиг.2-4. В данном примере и в относящемся к нему описании отклонение происходит в направлении упора 28. Разумеется, подобное отклонение может быть выполнено в противоположном направлении к упору 27. В этом случае система действует идентичным образом с симметричными элементами устройства.
Для выполнения бокового отклонения необходимо чтобы силовой цилиндр 29 находящегося сзади управляющего устройства 16 (следящий модуль 56) переходил в положение «штоки убраны». При отсутствии отклонения управляющее устройство 16 находится в положении, которое изображено на фиг.2.
При выполнении бокового отклонения связующее звено 23 изменяет форму и перемещается в направлении одной из сторон транспортного средства к одному из упоров 27, 28, например к упору 28 в данном примере.
В ходе этого перемещения и перед тем, как упереться в упор 28, связующее звено 23, в частности посредством периферийной тяги 24, соприкасается с концом внешней части 40 штока 30, выступающего из корпуса 32 силового цилиндра 29, в результате чего устройство находится в положении, показанном на фиг.3.
Если боковое отклонение продолжается, связующее звено 23 продолжает перемещаться к упору 28. В результате этого движения перемещается шток 30 силового цилиндра 29.
Внутренние части 38, 39 штоков 30 и 31 соприкасаются друг с другом в положении силового цилиндра 29 «штоки убраны», при этом штоки 30 и 31, так как и поршни 33 и 34 перемещаются совместно при оказании воздействия на выступающую часть одного из штоков 30 или 31. Подобное перемещение поршней 33, 34 вызывает увеличение одной из кольцеобразных периферийных камер 36 и 37 силового цилиндра 29 за счет другой камеры, что становится возможным в результате связи по жидкости между кольцеобразными периферийными камерами 36 и 37 через связующий трубопровод 47.
Когда периферийная тяга 24 воздействует на шток 30 силового цилиндра 29, кольцеобразная периферийная камера 36 силового цилиндра 29 увеличивается, в то время как кольцеобразная крайняя камера 37 уменьшается, в результате чего часть жидкости, которая вначале находилась в кольцеобразной крайней камере 37, переходит в кольцеобразную крайнюю камеру 36 через связующий трубопровод 47. Таким образом жидкость вынуждена проходить через сужения 48 трубопровода 47, которые вызывают эффект дросселирования и уменьшают ее напор. В результате замедляется перемещение системы штоков 30 и 31, что вызывает амортизацию движения как связующего звена 23, так и бокового отклонения в целом.
Следует отметить, что при всех перемещениях при положении силового цилиндра 29 «штоки убраны» не происходит изменения объема центральной камеры 35, штоки 30 и 31 соприкасаются друг с другом и не происходит изменения общего объема кольцеобразных периферийных камер 36 и 37 за счет переноса масла от одной камеры к другой.
Следовательно, в камерах при амортизации не происходит изменения направленного наружу давления. Очевидно, что давление поднимается в кольцеобразной периферийной камере 37 при торможении при передаче масла, происходящем в сужениях 48, что вызывает действие амортизации.
Движение с амортизацией связующего звена 23 продолжается до предельного положения, изображенного на фиг.4 и соответствующего максимально допустимому боковому отклонению, в котором периферийная тяга 26 входит в соприкосновение с упором 28. Благодаря амортизации, осуществленной силовым цилиндром 29, соприкосновение с упором осуществляется без сильных толчков, способных повредить устройство.
При перемещении поршней 33 и 34 и под действием усилия, прилагаемого периферийной тягой 24 на шток 30, пружина 52 постепенно сжимается.
Когда боковое отклонение подходит к концу, связующее звено 23 возвращается в начальное положение. Одновременно пружина 52 распрямляется и плавно возвращает поршень 34 в почти начальное положение. Следовательно, аналогичное действие происходит и для штоков 30 и 31 и поршня 33, которые перемещаются солидарно. Силовой цилиндр 29 вновь находится в положении, изображенном на фиг.2.
Очевидно, что данное положение является приблизительным. Действительно две противоположные пружины не могут дать точного положения, в частности, из-за преодоления сопротивления трения, которое в разной степени противостоит действию обеих пружин или из-за отличий, существующих между пружинами. Однако подобная ситуация не вызывает проблем, поскольку в целом необходим только возврат к центральному положению.
Согласно преимущественной характеристики изобретения, следует отметить, что каким бы не являлось положение силового цилиндра, даже когда штоки 30 и 31 силового цилиндра 29 находятся в своем крайнем положении как в одном, так и в другом направлениях, питающий трубопровод 46 остается свободным и способным снабжать центральную камеру 35 силового цилиндра 29 так, что в любой момент можно перевести силовой цилиндр в безопасное положение «штоки выпущены».
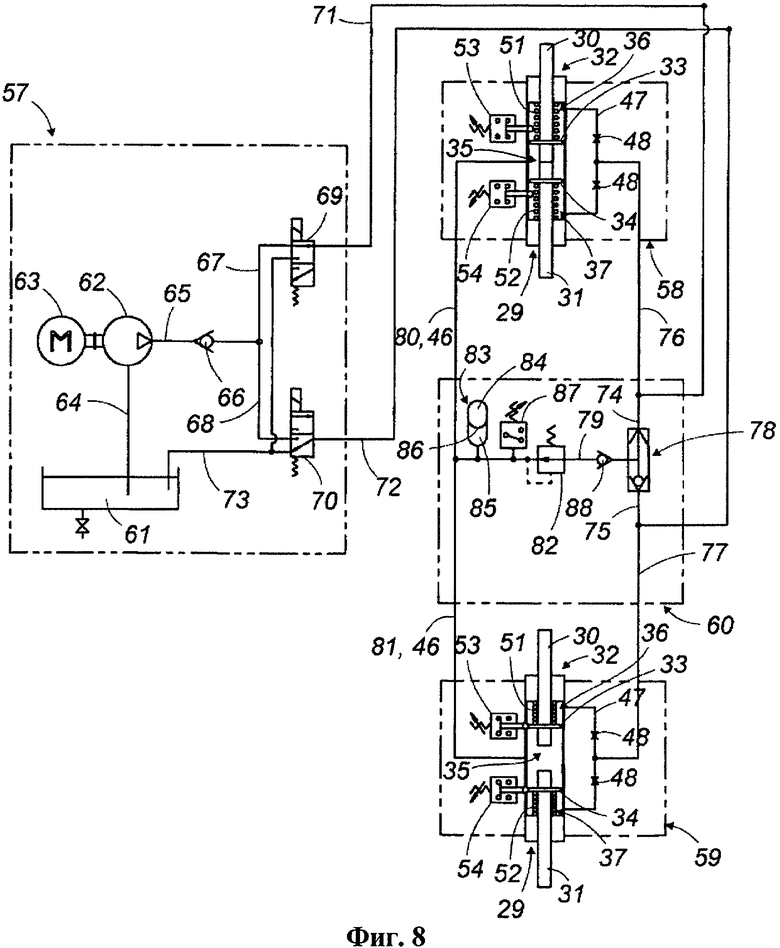
Далее будет описан со ссылкой на фиг.8 упрощенный пример гидравлического контура, совместимого с предлагаемой системой управления двустороннего действия.
Контур состоит из четырех основных функциональных блоков: гидравлического агрегата 57, двух блоков силового цилиндра 58 и 59 и гидравлической пружины 60.
Гидравлический агрегат 57 осуществляет питание разных элементов контура гидравлической жидкостью, предпочтительно маслом.
Для этого гидравлический агрегат 57 содержит аккумулятор 61, также называемый бак, содержащий масло и находящийся под атмосферным давлением.
Он также содержит насос 62, приводимый в действие двигателем 63, который подает масло из аккумулятора 61 через трубу 64 и создает давление в контуре через питающую линию 65. Обычно насос 62 защищается обратным клапаном 66.
Питающая линия 65 подразделяется на две ветви 67 и 68, каждая из которых подходит к одному из блоков силового цилиндра 58 или 59. На каждой ветви 67, 68 находится двухпозиционное распределительное устройство, соответственно 69 и 70, позволяющее в зависимости от его положения или соединить ветвь через связующий трубопровод 71 или 72 с соответствующим блоком силового цилиндра 58, 59, или закрыть ее. В последнем случае распределительное устройство 69, 70 соединяет соответствующий связующий трубопровод 71 или 72 с обратным трубопроводом 73 аккумулятора 61. Таким образом, в зависимости от положения соответствующего распределительного устройства 69, 70 каждый связующий трубопровод 71 или 72, сообщающийся с одним из блоков силового цилиндра 58 или 59, или находится под давлением, или направлен в бак.
Блоки силового цилиндра 58 и 59 каждый содержит силовой цилиндр 29 с двумя независимыми штоками 30 и 31, находящимися один напротив другого, как было описано ранее.
Каждый из связующих трубопроводов 71, 72 подразделяется на трубопровод, соответственно 74 и 75, направляющийся к гидравлической пружине 60, и трубопровод, соответственно 76 и 77, направляющийся к соответствующему блоку силового цилиндра 58, 59 и связанный с соответствующим силовым цилиндром 29 через связующий трубопровод 47 для питания кольцеобразных периферийных камер 36 и 37.
Трубопроводы 74 и 75, ведущие к гидравлической пружине 60 через систему обратных клапанов 78, попадают в трубопровод 79, проходящий через функциональный блок гидравлической пружины 60 и на выходе разделяющийся на два трубопровода 80 и 81, ведущих каждый к блоку силового цилиндра 58, 59 и служащих питающим трубопроводом 46 центральной камеры 35 силового цилиндра 29.
Гидравлическая пружина 60 содержит последовательно расположенные по длине трубопровода 79 редукционного клапана 82 и резервуар 83, внутреннее пространство которого разделено на две камеры 84 и 85 мембраной 86. Первая из камер 84 резервуара 83 герметично закрыта и содержит сжатый газ, преимущественно азот. Вторая камера 85 сообщается с гидравлическим контуром и служит резервом гидравлической жидкости.
Предпочтительно возле резервуара 83 выполнен датчик давления 87 для наблюдения за давлением в резервуаре.
Функционирование гидравлического контура будет очевидно из приведенного ниже описания.
При движении транспортного средства силовой цилиндр 29, расположенный спереди и соответствующий блоку силового цилиндра 59 на фиг.8, находится в положении «штоки выпущены», в то время как силовой цилиндр, расположенный сзади и соответствующий блоку силового цилиндра 58, находится в положении «штоки убраны».
Для этого распределительное устройство 69 находится в его положении, в котором ветвь 67 соединена со связующим трубопроводом 71. Насос 62 направляет таким образом масло под давлением в кольцеобразные периферийные камеры 36 и 37 блока силового цилиндра 58 через трубопроводы 65, 67, 71, 76 и 47.
Масло под давлением, поступающее из трубопровода 71, направляется равным образом через трубопровод 74 в гидравлическую пружину 60 через систему обратных клапанов 78. Оно пополняет камеру 85 резервуара 83 после снижения давления масла посредством редукционного клапана 82.
Центральная камера 35 блока силового цилиндра 58, соединенная с камерой 85 резервуара 83, находится под давлением, которое ниже давления кольцеобразных периферийных камер 36 и 37, связанных непосредственно с насосом 62. При этом поршни 33 и 34 сближаются до соприкосновения штоков 30 и 31, в результате чего силовой цилиндр 29 блока силового цилиндра 58 переходит в положение «штоки убраны».
Уменьшение давления, осуществленное редукционным клапаном 82, должно быть довольно значительным, чтобы штоки 30 и 31 могли вытеснить жидкость, содержащуюся в кольцеобразных периферийных камерах 36 и 37. Действительно обычно существует разница поверхностей, подверженных давлению. Со стороны центральной камеры 35 давление действует по всей поверхности поршней 33 и 34, в то время как со стороны кольцеобразных периферийных камер давление действует только на кольцеобразные поверхности, которые равны разности поверхности поршня и сечения соответствующего штока.
Кроме этого распределительное устройство 70 находится в положении, в котором ветвь 68 отсоединена, а связующий трубопровод 72 соединен с обратным трубопроводом 73 аккумулятора 61.
Кольцеобразные периферийные камеры 36 и 37 силового цилиндра 29 блока силового цилиндра 59 сообщаются с аккумулятором 61 через трубопроводы 73, 72, 77 и 47 и подвержены атмосферному давлению.
Центральная камера 35 силового цилиндра 29 связана с камерой 85 резервуара 83 через трубопроводы 81 и 79 и тем самым подвержена давлению, превышающему атмосферное давление. В результате чего поршни 33 и 34 расходятся, при этом пружины 51 и 52 сжимаются и силовой цилиндр 29 блока силового цилиндра 59 переходит в положение «штоки выпущены».
Преимущественно ролью гидравлической пружины 60 является перевод силового цилиндра 29 в положении «штоки выпущены». Данное положение наиболее надежное для транспортного средства, так как оно обеспечивает устойчивое постоянное управление и может функционировать, даже если изнашиваются ходовые ролики, которые воспринимают все нагрузки. Однако это условие не выполняется, если оба силовых цилиндра находятся в положение «штоки убраны».
Преимущественно с предлагаемой системой управления безопасное положение достигается пассивно и только перевод в положение «штоки убраны» вызывает необходимость ввода в действие насоса 62.
Аналогично, для перевода в положение «штоки убраны» необходимо подать электроэнергию на распределительные устройства 69 и 70, питающие кольцеобразные периферийные камеры 36 и 37 силовых цилиндров 29. Поэтому в случае отключения электроэнергии штоки силовых цилиндров 29 выпускаются автоматически.
В случае выхода из строя или сбоев насоса 62 или всего гидравлического агрегата 57, или в случае утечки из трубопроводов, находящихся между гидравлическим агрегатом 57 и блоками силового цилиндра 58 и 59, резервуар 83 обеспечивает автоматический переход в безопасное положение «штоки выпущены» силовых цилиндров 29.
Из соображений безопасности преимущественно предусмотрен дополнительный обратный клапан 88 во избежание опорожнения камеры 85 резервуара 83 в случае разрыва одного из трубопроводов, расположенных между гидравлическим агрегатом 57 и блоками силового цилиндра 58 и 59 или гидравлической пружиной 60.
Предпочтительно и из конструктивных соображений, трубопроводы, находящиеся между резервуаром 83 и блоками силового цилиндра 58 и 59, выполняются в форме жестких трубок наименьшей длины для ограничения риска утечки. Блок гидравлической пружины 60 может быть непосредственно встроен в один из двух силовых цилиндров 29 для того, чтобы избежать дополнительных трубопроводов.
На фиг.8 был представлен упрощенный гидравлический контур, содержащий всего два блока силовых цилиндров 58 и 59, установленных на оси 2. Очевидно, что гидравлический контур может быть более сложным и включать, например, множество блоков силового цилиндра, предназначенных группами по два управлять дополнительными осями. Каждая группа из двух блоков силовых цилиндров предпочтительно взаимодействует с дополнительной гидравлической пружиной. Преимущественно они могут питаться через параллельное соединение от одного гидравлического агрегата 57. Их функционирование идентично функционированию, описанному ранее.
Предлагаемая система управления двустороннего действия преимущественно содержит внутренний ограничитель нагрузки, связанный с описанным ранее режимом работы гидравлического контура. Действительно в случае пиковых нагрузок, воздействующих на систему управления в положении «штоки выпущены», например в случае значительных дефектов пути, штоки частично убираются, если оказываемое на них давление превосходит давление в резервуаре, защищая тем самым механические детали устройства. При необходимости можно устанавливать и фиксировать давление в резервуаре в зависимости от максимально допустимых нагрузок устройства.
Очевидно, что изобретение не ограничивается предпочтительными вариантами осуществления, описанными ранее и представленными на фигурах, специалист в данной области техники может осуществить многочисленные изменения и выполнить другие варианты осуществления, не отклоняясь от объема и сущности изобретения.
Например, предлагаемая система управления могла бы применяться на транспортном средстве, двигающемся всегда в одном направлении, для того, чтобы контролировать и амортизировать боковое отклонение. В этом случае управляющее устройство, размещенное перед осью, может быть модифицировано для того, чтобы постоянно находиться в жестком состоянии, или может быть заменено жестким управляющим устройством.
Изобретение относится к области транспортного машиностроения. Система управления двустороннего действия оси транспортного средства содержит два управляющих устройства, соединенных с осью и расположенных противоположно с одной и с другой стороны от оси. Каждое управляющее устройство содержит направляющую штангу, одинарную или двойную, направленную к направляющему рельсу и несущую один направляющий ролик. Ролик находится в зацеплении с направляющим рельсом. Каждое управляющее устройство имеет два состояния, жесткое, позволяющее управлять осью, и свободное состояние, допускающее боковое отклонение. Управляющее устройство содержит деформируемое связующее звено между осью и направляющей штангой, и силовой цилиндр. Деформируемое связующее звено делает возможным благодаря собственной деформации боковое отклонение оси относительно направляющего рельса. Силовой цилиндр имеет два независимых и противоположных штока, которые имеют два положения: положение «штоки выпущены», приводящее управляющее устройство в жесткое состояние, и положение «штоки убраны», приводящее управляющее устройство в свободное состояние. Достигается уменьшение боковых напряжений системы. 21 з.п. ф-лы, 8 ил.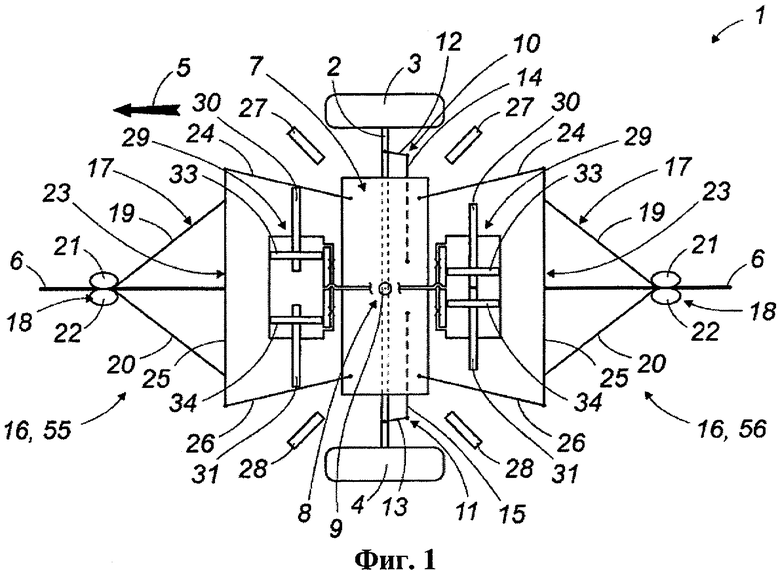
1. Система управления двустороннего действия (1) оси (2) транспортного средства, направляемого направляющим рельсом (6), установленным на основании, в частности для городского пассажирского транспортного средства, система управления содержит два управляющих устройства (16), соединенных с осью (2) и расположенных противоположно с одной и с другой стороны от оси, каждое из которых содержит направляющую штангу (17), одинарную или двойную, направленную к направляющему рельсу (6) и несущую по меньшей мере один направляющий ролик (18), находящийся в зацеплении с направляющим рельсом (6), каждое управляющее устройство (16) имеет два состояния, жесткое, позволяющее управлять осью (2), и свободное состояние, допускающее боковое отклонение, которые используются поочередно, в зависимости от направления движения транспортного средства, направляющим модулем (55) - жесткое состояние, и следящим модулем (56) - свободное состояние, отличающаяся тем, что управляющее устройство (16) содержит деформируемое связующее звено (23) между осью (2) и направляющей штангой (17), которое делает возможным благодаря собственной деформации боковое отклонение оси (2) относительно направляющего рельса (6), и силовой цилиндр (29) с двумя независимыми и противоположными штоками, которые имеют два положения: положение «штоки выпущены», приводящее управляющее устройство (16) в жесткое состояние, в котором оба штока (30, 31) максимально выпущены и блокируют деформируемое связующее звено (23), в результате чего образуется жесткое связующее звено между осью (2) и направляющей штангой (17), позволяющее направлять ось (2) для ее управления, и положение «штоки убраны», приводящее управляющее устройство (16) в свободное состояние, в котором оба штока (30, 31) максимально убраны и высвобождается связующее звено (23), допускающее боковое отклонение.
2. Система управления двустороннего действия по п.1, отличающаяся тем, что дополнительно содержит поворотную пластину (7), прикрепленную к оси (2) жестко или посредством шарнирного соединения (8), на которой размещаются одно напротив другого два управляющих устройства (16).
3. Система управления двустороннего действия по п.1 или 2, отличающаяся тем, что деформируемое связующее звено (23) содержит систему шарнирных тяг.
4. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что деформируемое связующее звено (23) представляет собой систему шарнирных тяг, соединяющихся одна за другой, свободные края которых прикрепляются шарнирно к оси (2) или поворотной пластине (7) так, что образуется деформируемый многоугольник в основном в горизонтальной плоскости.
5. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что деформируемое связующее звено (23) содержит три тяги, периферийную тягу (24), центральную тягу (25) и периферийную тягу (26), которые прикреплены шарнирно к оси (2) или поворотной пластине (7) так, что образуется деформируемая трапеция или деформируемый параллелограмм в основном в горизонтальной плоскости.
6. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что обе периферийные тяги (24, 26) имеют одинаковую длину и являются короче центральной тяги (25).
7. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что дополнительно содержит несколько упоров (27, 28), ограничивающих боковое отклонение.
8. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что содержит по два упора (27, 28) на каждое управляющее устройство (16), в которые упирается деформируемое связующее звено (23), когда оно достигает максимально допустимого бокового отклонения.
9. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что дополнительно содержит средство амортизации (48) бокового отклонения.
10. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что силовой цилиндр (29) выполняет дополнительную функцию амортизации бокового отклонения.
11. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что при появлении бокового отклонения деформируемое связующее звено (23) воздействует при деформации на один из штоков (30, 31) силового цилиндра (29), в результате чего возникает амортизация бокового отклонения.
12. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что силовой цилиндр (29) включает цилиндрический корпус (32), в котором перемещаются два поршня (33, 34), каждый из которых присоединяется к одному из штоков (30, 31) силового цилиндра (29), разделяющих внутренний объем корпуса (32) на центральную камеру (35) и две кольцеобразных периферийных камеры (36, 37), находящиеся соответственно между обеими и с обеих сторон поршней (33, 34).
13. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что поршни (33, 34) установлены на соответствующих штоках (30, 31) силового цилиндра (29), таким образом, что часть штока выступает из каждой стороны поршня, определяя тем самым для каждого из штоков внутреннюю часть (38, 39), расположенную в центральной камере (35) силового цилиндра, и внешнюю часть (40, 41), расположенную в соответствующей кольцеобразной периферийной камере (36, 37) и выступающую за нее, причем свободные края внутренних частей (38, 39) обоих штоков (30, 31) силового цилиндра соприкасаются, когда силовой цилиндр находится в положении «штоки убраны».
14. Система управления двустороннего действия по п.12 или 13, отличающаяся тем, что жидкость в центральную камеру (35) силового цилиндра (29) поступает через питающий трубопровод (46), который остается свободным и способным питать центральную камеру (35) вне зависимости от положения силового цилиндра.
15. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что содержит связующий трубопровод (47), объединяющий две кольцеобразные периферийные камеры (36, 37) силового цилиндра (29).
16. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что связующий трубопровод (47), объединяющий две кольцеобразные периферийные камеры (36, 37), содержит по меньшей мере одно сужение (48).
17. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что содержит пружины (51, 52) плавно возвращающие поршни (33, 34) к центру корпуса (32) силового цилиндра (29).
18. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что каждое управляющее устройство (16) содержит по меньшей мере один датчик (53, 54), определяющий положение «штоки выпущены» силового цилиндра (29).
19. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что она является гидравлической и ее гидравлический контур включает гидравлический агрегат (57), осуществляющий питание разных элементов контура гидравлической жидкостью, по меньшей мере два блока силового цилиндра (58, 59) и по меньшей мере одну гидравлическую пружину (60), служащую для приведения силовых цилиндров (29) в положение «штоки выпущены».
20. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что гидравлический агрегат (57) содержит аккумулятор (61), насос (62), приводимый в действие двигателем (63), и два двухпозиционных распределительных устройства (69, 70).
21. Система управления двустороннего действия по любому из п.19 и 20, отличающаяся тем, что гидравлическая пружина (60) имеет редукционный клапан (82) и резервуар (83), внутренний объем которого разделен на две камеры (84, 85) посредством мембраны (86), причем первая камера (84) герметично закрыта и содержит сжатый газ, а вторая (85) сообщается с гидравлическим контуром и служит резервом гидравлической жидкости.
22. Система управления двустороннего действия по предыдущему пункту, отличающаяся тем, что трубопроводы, находящиеся между резервуаром (83) и блоками силового цилиндра (58, 59), выполнены в виде жестких коротких трубок.
| СПОСОБ УВЕЛИЧЕНИЯ ПЬЕЗОЧУВСТВИТЕЛЬНОСТИ БИМОРФА ИЗГИБНОГО ТИПА | 2022 |
|
RU2778161C1 |
| ЗАМЕЩЕННЫЕ АМИНОПИРИМИДИНОВЫЕ СОЕДИНЕНИЯ И СПОСОБЫ ИХ ИСПОЛЬЗОВАНИЯ | 2014 |
|
RU2675105C9 |
| Закладочный трубопровод для транспортирования литых смесей | 1979 |
|
SU877082A1 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО РУЛЕВОГО УПРАВЛЕНИЯ ЗАДНИМ УПРАВЛЯЕМЫМ МОСТОМ АВТОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2131368C1 |

