Изобретение относится к водному транспорту и может быть использовано для стабилизации положения танкера, занятого погрузкой нефтепродуктов, относительно нефтяного терминала в открытом море, при условии, когда в районе погрузки местоположение танкера подвержено воздействиям ветроволновых возмущений, течения, льда.
Известен способ управления судном в режиме стабилизации положения судна, основанный на измерении продольного и поперечного смещений судна относительно заданного положения и отклонения его по курсу, сравнении измеренных величин смещений и отклонения с допустимыми значениями и формировании на их основе разности сигнала управления для осуществления воздействий на судно средствами его движительно-рулевого комплекса с учетом сигнала обратной связи, а также на измерении курсового угла и скорости кажущегося ветра [1], [2], [3].
Цель стабилизации положения танкера в процессе выполнения им грузовой операции на нефтяном терминале принципиально отличается от цели стабилизации судна, например, занятого буровыми работами, так как при стабилизации положения танкера не ставится задача удержания танкера в заданной точке (точка с заданными координатами, значения которых постоянны) с известными допустимыми отклонениями от нее.
В соответствии с требованиями безопасности выполнения грузовых операций на нефтяном терминале танкер должен постоянно находиться на прямой линии, проходящей через центр нефтяного терминала, диаметральная плоскость (ДП) танкера должна совпадать с указанной линией. При этом допускается изменение во времени направления линии, проходящей через центр нефтяного терминала, т.е. в отличие от случая стабилизации судна в заданной точке при стабилизации танкера в заданном направлении относительно нефтяного терминала допустимо изменение положения заданной точки.
Задачей изобретения является совершенствование управления танкером, занятым погрузкой нефтепродуктов в условиях открытого моря, для стабилизации его положения относительно нефтяного терминала.
Она решается в способе стабилизации положения танкера при выполнении грузовых операций, основанном на формировании сигнала управления исполнительным механизмам, тем, что непрерывно определяют во времени текущие координаты следующих точек:
- геометрического центра нефтяного терминала O(φO, λO);
- кормовой точки танкера А(φA, λA);
- носовой точки танкера F(φF, λF),
определяют точку F1, лежащую на линии, соединяющей центр нефтяного терминала и кормовую точку А танкера, при этом точка F1 расположена на фиксированном расстоянии d от центра нефтяного терминала, рассчитывают текущие координаты точки F1(φF1, λF1), затем рассчитывают расстояние между текущими положениями точек F и F1, определяют величину отрезка FF1 и пропорционально величине отрезка FF1 формируют сигнал управления исполнительным механизмам для приведения носовой точки танкера F в точку F1. При этом расстояние d определяется требованиями безопасности проведения грузовых операций, а носовая точка F расположена как можно ближе к крайней носовой точке танкера, определяемой геометрическими контурами последнего, или совпадает с ней.
Благодаря наличию указанных признаков возможно достижение поставленной задачи.
Способ управления танкером, занятым погрузкой нефтепродуктов в условиях открытого моря, для стабилизации его положения относительно нефтяного терминала заключается в следующем.
Непрерывно во времени определяют текущие координаты следующих точек (фиг.):
- геометрического центра О(φO, λO) нефтяного терминала 2;
- кормовой точки А(φA, λА) (условно кормовая точка) танкера 1;
- носовой точки F(φF, λF) (условно носовая точка) танкера 1.
Две последние точки А, F должны находиться в ДП танкера 1, кроме того, носовая точка F должна быть расположена предельно близко к крайней носовой точке (геометрическая точка контура танкера 1) или, в соответствии с техническими возможностями конструкции корпуса танкера 1, совпадать с ней. Последнее условие продиктовано необходимостью более точного соблюдения требования безопасности грузовых операций, а именно сохранению постоянным значения дистанции между центром (точка О) нефтяного терминала 2 и крайней точкой носовой оконечности танкера 1, которое мы обозначим буквой d. Координаты точек О, А, F определяются спутниковой навигационной системой (СНС) GPS или ГЛОНАСС с использованием дифференциальных поправок, повышающих точность определения координат до величины не более ±1,0 м [4].
Рассчитывают текущие координаты точки F1(φF1, λF1) (фиг.). Положение точки F1 на линии, соединяющей центр нефтяного терминала 2 с кормовой точкой танкера 1, определяется заданным по условиям безопасности значением расстояния между центром терминала 2, точкой О, и крайней точкой носовой оконечности танкера 1. Это расстояние фиксировано и, как сказано выше, равно d. Координаты точки F1 рассчитывают с использованием значений текущих координат известных точек O(φO, λO) и А(φА, λA) и заданного расстояния d по формулам:


В выражениях (1), (2) текущая величина отрезка ОА является переменной величиной и определяется зависимостью:

Рассчитывают расстояние между точками F и F1, т.е. величину отрезка FF1 - текущее отстояние носовой точки F танкера 1 от точки F1, расположенной на расстоянии d от центра нефтяного терминала 2 на линии, соединяющей центр нефтяного терминала 2 с кормовой точкой А танкера 1:
FF1=[(λF-λF1)2+(φF-φF1)2]0,5.
Пропорционально величине отрезка FF1 формируют сигнал управления для движительно-рулевого комплекса танкера 1, работа которого приводит к приведению носовой точки F танкера 1 в точку F1, лежащую на расстоянии d от центра (точка О) нефтяного терминала 2 на линии, соединяющей центр нефтяного терминала 2 (точка О) с кормовой точкой А танкера 1. В итоге все известные точки О, F, А будут находиться на одной линии, что соответствует требованиям безопасного выполнения грузовых операций танкера 1 на нефтяном терминале 2 в условиях открытого моря.
Литература
1. Система автоматического удержания судна над заданной точкой морского дна. А.с. №944988, М.кл.3 В63Н 25/04, заявл. 10.03.77, з. №2461278/27-11. Опубл. 23.07.82. Бюл. №27. Авторы: В.И.Жилин, Д.А.Каинов, О.А.Лосев. Заявитель: Севастопольский приборостроительный институт.
2. Способ динамического позиционирования судна при возникновении шквала. Пат. №2392182, МПК В63Н 25/00, заявка 2009110336/11, 20.03.2009, опубликовано: 20.06.2010. Авторы: Васильев К.К. и др. Патентообладатель: ФНПЦ ОАО «Научно-производственное объединение «Марс»» (RU).
3. Способ управления судном в режиме без хода. А.с. №766958, М.кл.3 В63Н 25/04. Заявл. 17.03.78, з. №2591281/27-11. Опубл. 30.09.80. Бюл. №36, 02.10.80. Автор: В.К.Болховитинов.
4. Липкин И.А. Спутниковые навигационные системы. - М.: Вузовская книга, 2001. - 215 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления поперечным и продольным движением судна относительно морского грузового терминала | 2024 |
|
RU2834495C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА | 2012 |
|
RU2501064C2 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| НОСОВАЯ ОКОНЕЧНОСТЬ ПОДВОДНОГО КОРПУСА ПОЛУПОГРУЖНОГО СУДНА | 2012 |
|
RU2506192C1 |
| РЕКОНСТРУКЦИЯ ТАНКЕРОВ | 1995 |
|
RU2139808C1 |
| КОРМОВАЯ ОКОНЕЧНОСТЬ ПОЛУПОГРУЖНОГО КРУПНОТОННАЖНОГО СУДНА | 2013 |
|
RU2537362C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2010 |
|
RU2422326C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2008 |
|
RU2375249C1 |
| Устройство для определения оптимальной загрузки судна | 1974 |
|
SU521578A2 |
| ПОЛУПОГРУЖНОЕ ЛЕДОКОЛЬНО-ТРАНСПОРТНОЕ СУДНО | 2011 |
|
RU2443596C1 |
Изобретение относится к водному транспорту и может быть использовано для стабилизации положения танкера при погрузке нефтепродуктов относительно нефтяного терминала в открытом море. Способ стабилизации положения танкера при выполнении грузовых работ основан на формировании сигнала управления исполнительным механизмам. Непрерывно определяют во времени текущие координаты следующих точек: геометрического центра нефтяного терминала O(φO, λO); кормовой точки танкера А(φA, λA); носовой точки танкера F(φF, λF), определяют точку F1, лежащую на линии, соединяющей центр нефтяного терминала и кормовую точку А танкера. При этом точка F1 расположена на фиксированном расстоянии d от центра нефтяного терминала. Далее рассчитывают текущие координаты точки F1(φF1, λF1), затем рассчитывают расстояние между текущими положениями точек F и F1 и определяют величину отрезка FF1. Пропорционально величине отрезка FF1 формируют сигнал управления исполнительным механизмам для приведения носовой точки танкера F в точку F1. В итоге все точки О, F, А будут находиться на одной линии для удовлетворения требования безопасного выполнения грузовых операций танкера на нефтяном терминале в условиях открытого моря. 2 з.п. ф-лы, 1 ил.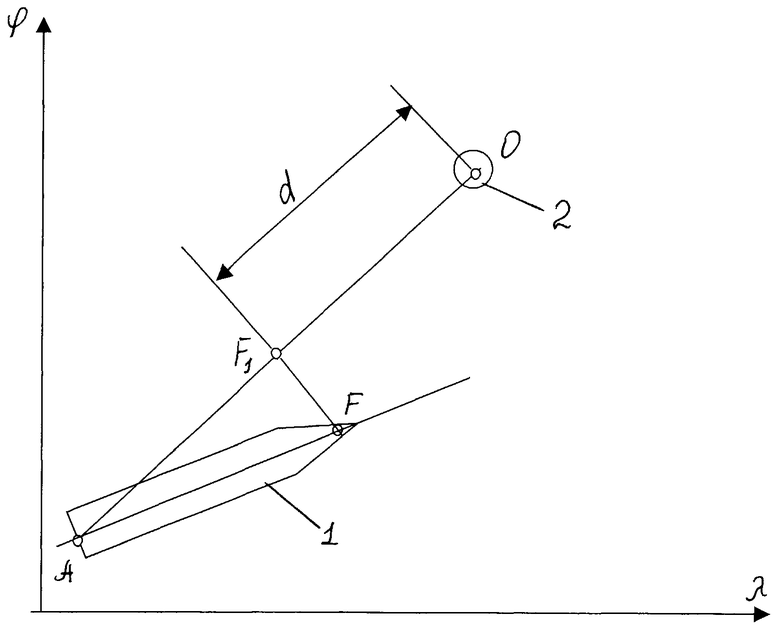
1. Способ стабилизации положения танкера при выполнении грузовых работ, основанный на формировании сигнала управления исполнительным механизмам, отличающийся тем, что непрерывно определяют во времени текущие координаты следующих точек:
геометрического центра нефтяного терминала O(φO, λO);
кормовой точки танкера А(φA, λA);
носовой точки танкера F(φF, λF),
определяют точку F1, лежащую на линии, соединяющей центр нефтяного терминала и кормовую точку А танкера, при этом точка f1 расположена на фиксированном расстоянии d от центра нефтяного терминала, рассчитывают текущие координаты точки F1(φF1, λF1), затем рассчитывают расстояние между текущими положениями точек F и f1, определяют величину отрезка FF1 и пропорционально величине отрезка FF1 формируют сигнал управления исполнительным механизмам для приведения носовой точки танкера F в точку F1.
2. Способ по п.1, отличающийся тем, что расстояние d определяется требованиями безопасности проведения грузовых операций.
3. Способ по п.1, отличающийся тем, что носовая точка F расположена как можно ближе к крайней носовой точке танкера, определяемой геометрическими контурами последнего, или совпадает с ней.
| Способ изготовления пластических масс из древесной муки и т.п. | 1933 |
|
SU37847A1 |
| Приспособление для протягивания кино пленок с звуковой записью | 1932 |
|
SU32298A1 |
| JP 2001023100 А, 26.01.2001 | |||
| Система автоматического удержания судна над заданной точкой морского дна | 1977 |
|
SU944988A1 |

