Изобретение относится к средствам управления судами и может быть использовано для обеспечения безопасности маневрирования судна при швартовке к грузовому терминалу.
Безопасность маневрирования судна обеспечивается взаимодействием судового и берегового сегментов. Предлагаемая в данном изобретении технология взаимодействия судового и берегового сегментов предназначена для использования в акваториях морских портов, каналах, проливах и т.д. для проводки и швартовки судов к различным типам морских грузовых терминалов - нефтяных и СПГ причалов, ВПУ, танкеров-накопителей, нефтяных и буровых платформ, особенно хорошо может быть использована для управления движением крупнотоннажного судна в морских и подходных каналах, акваториях морских портов с ярко выраженными навигационными особенностями.
Известен «Способ стабилизации положения танкера при выполнении грузовых работ» (патент РФ №2462389, опубл. 27.09.2012, МПК B63H 25/00, G05D 1/00), который используется для стабилизации положения танкера при погрузке нефтепродуктов относительно нефтяного терминала в открытом море. Это изобретение направлено на решение задачи совершенствования управления танкером, занятым погрузкой нефтепродуктов в условиях открытого моря, для стабилизации его положения относительно нефтяного терминала.
Способ основан на формировании сигнала управления исполнительным механизмом, при этом непрерывно определяют во времени текущие координаты точек - геометрического центра нефтяного терминала; кормовой точки танкера и носовой точки танкера; определяют также точку, лежащую на линии, соединяющей центр нефтяного терминала и кормовую точку танкера. Определяются расстояния между точками, соответствующие требованиями безопасности проведения грузовых операций.
Известна система для морского маневрирования в порту по Европейскому патенту EP 2574955 A1, где рассматривается система позиционирования морских судов, маневрирующих в портовом бассейне и внутренних путях. Система состоит из наземной подсистемы, состоящей из стационарно расположенных вдоль берега в направлении к воды по меньшей мере трех лазерных головок /1/, /2/, /3/, для измерения расстояния судна /5/ по обеим ватерлиниям /6/ от берега, работающего в непрерывной системе с частотой ок. 50 Гц, в то время как судовая /5/ ватерлиния /6/ со стороны причала, к которому судно /5/ намеревается причалить, должно находиться в зоне действия по меньшей мере двух лазерных головок /1/ и /2/, а ватерлиния напротив /6/ находится, по меньшей мере, в зоне действия одной из лазерных головок /3/, следующими элементами наземной подсистемы являются: модуль передачи данных /10/, основной блок /11/, блок питания /12/ и интерфейс /13/, а подсистема судна содержит модуль приема данных /14/ основной блок /15/ пользовательский интерфейс /16/ и блок питания /17/, тогда как третья подсистема представляет собой систему беспроводной передачи, с динамически распределяемыми временными интервалами для передачи данных от конкретных лазерных головок /1/, /2/ и /3/.
Известен способ для обеспечения безопасности маневрирования судна при подходе к причалу и швартовки «Способ швартовки судна с помощью лазерной системы» (патент РФ №2613465)
Согласно этому способу, лазерные измерители расстояния до объекта швартовки с устройствами передачи-приема устанавливают на оконечностях судна. Измерители имеют свой датчик угла наклона лазерного луча соответственно. Информацию от всех данных устройств в виде их сигналов вводят в блок обработки информации, который рассчитывает и выдает на дисплей о горизонтальном расстоянии и горизонтальной скорости оконечностей судна, которые используют при подходе его к причалу. Достигается возможность повышения безопасности маневрирования и расширения видов передаваемой измеряемой информации.
Указанные способы относятся к технологиям судового сегмента, при этом как способ как по патенту РФ №2462389, так и по патенту РФ №2613465 не дает вычислить продольное смещение судна и смещение по вертикали - осадки судна, из-за этого не обеспечивается требуемая точность местоположения судна.
За прототип принят «Способ высокоточного определения навигационных элементов движения судна» по патенту РФ №2643072, опубл. 19.12.2017, B63H 25/04, G01C 23/00. В этом способе для определения навигационных элементов, а именно: вектор скорости носовой и кормовой оконечностей судна, положение точки вращения судна, значения угловой скорости поворота судна, отклонения центра тяжести судна от заданной траектории, расстояния от носовой и кормовой оконечностей судна до левой и правой бровки канала, параметров движения характерных точек, вычисляют навигационные параметры спутниковыми навигационными системами и бортовой инерциальной навигационной системой с учетом поправок береговой локальной контрольно-корректирующей станции. Вычисляют следующие навигационные параметры, а именно: текущее расстояние от точек носовых и кормовых обводов судна до опасной изобаты, скорости сближения точек носовых и кормовых обводов судна с опасной изобатой, поперечных составляющих носовой и кормовой оконечностей судна, векторов носовой и кормовой скоростей судна, угловой скорости вращения судна относительно полюса вращения. Вычисленные навигационные параметры используются электронно-картографической навигационно-информационной системой определенным образом.
Задачами, на решение которых направлен заявляемый способ, являются:
- снижение влияния человеческого фактора на возникновение аварийных ситуаций во время швартовных и грузовых операций;
- возможность интеграции берегового сегмента технологии двух опорных точек в общую портовую инфраструктуру по перевалке груза в целях повышения интенсивности работы порта.
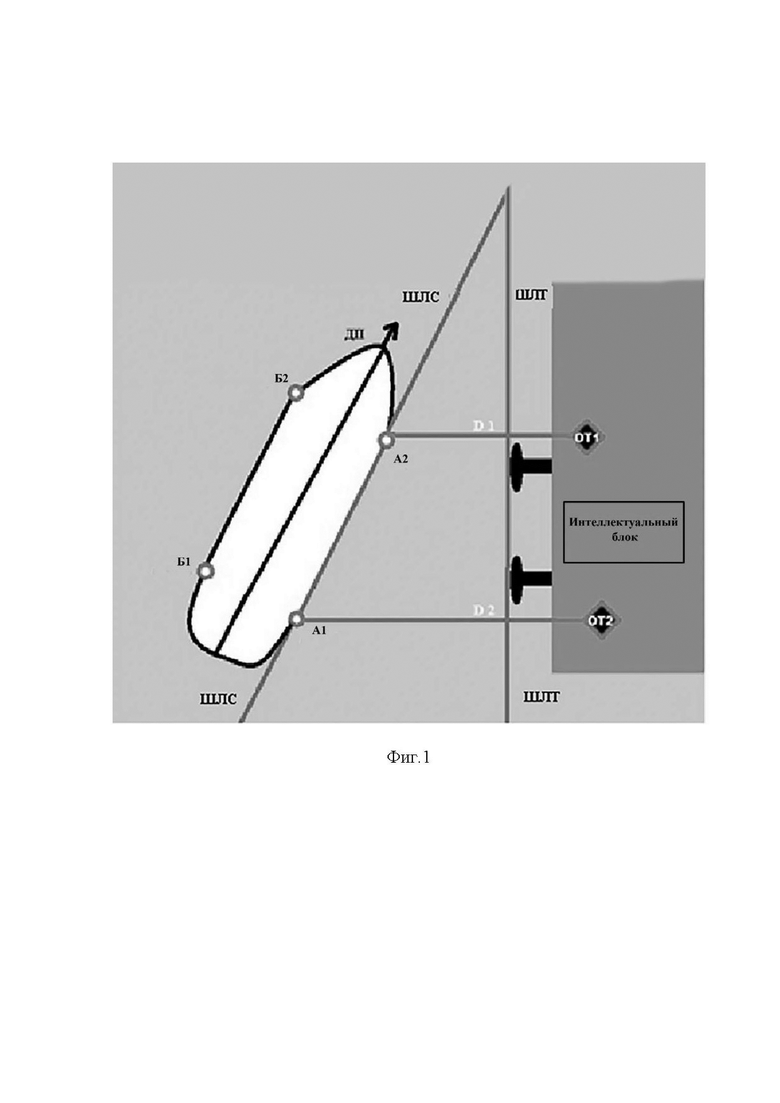
Поставленные задачи решаются тем, что предложен способ высокоточного определения продольного и поперечного движения судна относительно морского грузового терминала, включающий позиционирование судна в морском пространстве с помощью вычислителей навигационных величин, расположенных в двух опорных точках, отличающийся тем, что положение судна как подвижного объекта в пространстве ориентируют таким образом, чтобы корпус судна попал в зону действия лазерных дальномеров, видеокамер и микроконтроллеров, устанавливаемых стационарно в двух опорных точках ОТ1 и ОТ2 на поверхности терминала, при этом в пространстве между двумя опорными точками ОТ1 и ОТ2 располагают интеллектуальный блок, обеспечивающей связь подвижного объекта - судна, с неподвижным объектом - морским терминалом, а позиционирование судна относительно морского грузового терминала и определение продольного и поперечного движения судна осуществляют по параметрам треугольника жесткости, образованного пересечением линии, параллельной оси судна - швартовной линией судна (ШЛС), и линии, параллельной линии, соединяющей две опорные точки на терминале - швартовной линией терминала (ШЛТ) , причем располагать опорные точки рекомендуется на расстоянии 75 метров друг от друга, таким образом, чтобы они находились максимально близко к центру швартуемого судна.
Технический результат - получение надежных высокоточных навигационных данных о положении корпуса конкретного судна по отношению к терминалу в реальном масштабе времени - достигается за счет автоматизации процессов берегового сегмента, высокая точность и надежность данных обеспечивается за счет использования береговых стационарных оптических датчиков, а также за счет интеллектуальных алгоритмов обработки результатов автоматических измерений.
Две опорные точки, стационарно установленные на грузовом терминале, с размещенными в них лазерными дальномерами, видеокамерами и микроконтроллерами, позволяют получать высокоточную навигационную информацию о сближении судна с причалом:
- дистанции сближения бака и кормы судна с причалом;
- скорости сближения бака и кормы судна с причалом;
- угла между диаметральной плоскостью и швартовной линией.
Эти данные позволяют решать в реальном масштабе времени задачи подхода, отхода судна от причала, а также мониторинг стоянки судна во время проведения грузовых операций. Это задачи определения продольного и поперечного смещения корпуса судна относительно швартовной линии, которые могут с высокой степенью точности решаться для любых типов корпусов судов, подходящих к конкретному морскому грузовому терминалу.
Судно подвижное, положение судна зависит от многих параметров, если судно отклонится, то лазерный луч от опорных точек терминала пройдет мимо, при этом не достигается поставленная цель. Поэтому главное -положение судна в морском пространстве, обеспечивающее такое позиционирование судна относительно терминала, при котором осуществляется взаимодействие судового и берегового сегментов.
Жесткость конструкции судно-терминал позволяет определить угол между ШЛС - швартовная линия судна и ШЛТ - швартовная линия терминала, при этом контролируется поперечное движение корпуса относительно терминала.
Интеллектуальный блок оснащен специализированными компьютерными программами, благодаря которым он «знает» какое судно с какими параметрами, определяет скорость движения судна, предвычисляет скорость движения судна в последующие 2 минуты от текущего момента времени и, таким образом, повышает надежность решения задачи сближения судна с терминалом.
Основная задача - подойти к причалу. Может быть продольное смещение судна относительно причала. Видеокамера вырезает кусок изображения корпуса судна и включает режим «машинного зрения», анализируя вырезанный квадрат видеокамеры, функция «машинного зрения» определяет характеристики неровности корпуса и включает функцию образов (неровности), далее осуществляет слежение за перемещением этих захваченных образов в плоскости, перпендикулярной линии ШЛТ .
Контролируя полностью корпус судна, капитан и лоцман подводят судно в необходимое место терминала, при этом операция швартовки заканчивается, осуществляется слежение судна за фиксированием образа неровностей, решаются задачи определения элементов продольного движения судна относительно терминала, а также решаются задачи определения изменения осадки судна.
Реализация способа в 3 этапа:
I этап - контроль за положением судна в пространстве
II этап - непосредственно швартовка
III этап - контроль за положением судна относительно терминала, определение продольного и поперечного положения судна.
Способ поясняется графическим материалом (фиг. 1), на котором схематические изображено судно с расположенными на нем опорными точками с вычислителями навигационных величин, а также поверхность терминала с опорными точками ОТ1, ОТ2 и интеллектуальным блоком.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| ТАНКЕР ЛЕДОВОГО КЛАССА | 2011 |
|
RU2493042C2 |
| СПОСОБ ШВАРТОВКИ СУДНА С ПОМОЩЬЮ ЛАЗЕРНОЙ СИСТЕМЫ | 2015 |
|
RU2613465C1 |
| КОМПЛЕКС ДЛЯ ПЕРЕДАЧИ ЖИДКОГО ГРУЗА НА ТАНКЕР (ВАРИАНТЫ) | 2002 |
|
RU2200109C1 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ТЕКУЧЕЙ СРЕДЫ К ПЛАВАЮЩЕМУ СУДНУ | 2013 |
|
RU2538739C1 |
| ЛЕДОКОЛ (ВАРИАНТЫ), СПОСОБ И СИСТЕМА ОДНООПОРНОЙ ШВАРТОВКИ И ОБСЛУЖИВАНИЯ СУДОВ | 2002 |
|
RU2201375C1 |
| КОМПЛЕКС ДЛЯ ПЕРЕДАЧИ ЖИДКОГО ГРУЗА, ПРЕИМУЩЕСТВЕННО НЕФТИ, НА ТАНКЕР | 2008 |
|
RU2378149C1 |
| БЕРЕГОВОЙ ШВАРТОВНЫЙ КОМПЛЕКС, БЕРЕГОВОЙ ОПОРНЫЙ ШВАРТОВНЫЙ МОДУЛЬ (ВАРИАНТЫ), УНИВЕРСАЛЬНАЯ МАГНИТНАЯ ЗАХВАТНАЯ СЕКЦИЯ (ВАРИАНТЫ), МАГНИТНАЯ ЯЧЕЙКА | 2024 |
|
RU2834110C1 |
Изобретение относится к средствам управления судами и может быть использовано для обеспечения безопасности маневрирования судна при швартовке к грузовому терминалу. Положение судна как подвижного объекта в пространстве ориентируют таким образом, чтобы корпус судна попал в зону действия лазерных дальномеров, видеокамер и микроконтроллеров, устанавливаемых стационарно в двух опорных точках на поверхности терминала. В пространстве между двумя опорными точками располагают интеллектуальный блок, обеспечивающий связь судна с морским терминалом. Позиционирование судна относительно морского терминала и определение продольного и поперечного движения судна осуществляют по параметрам треугольника жесткости, образованного пересечением линии, параллельной оси судна, и линии, параллельной линии, соединяющей две опорные точки на терминале. Расстояние между двумя опорными точками на поверхности терминала определяется параметрами судов, которые подходят к причалу. Технический результат - получение надежных высокоточных навигационных данных о положении корпуса конкретного судна по отношению к терминалу в реальном масштабе времени. 1 з.п. ф-лы, 1 ил.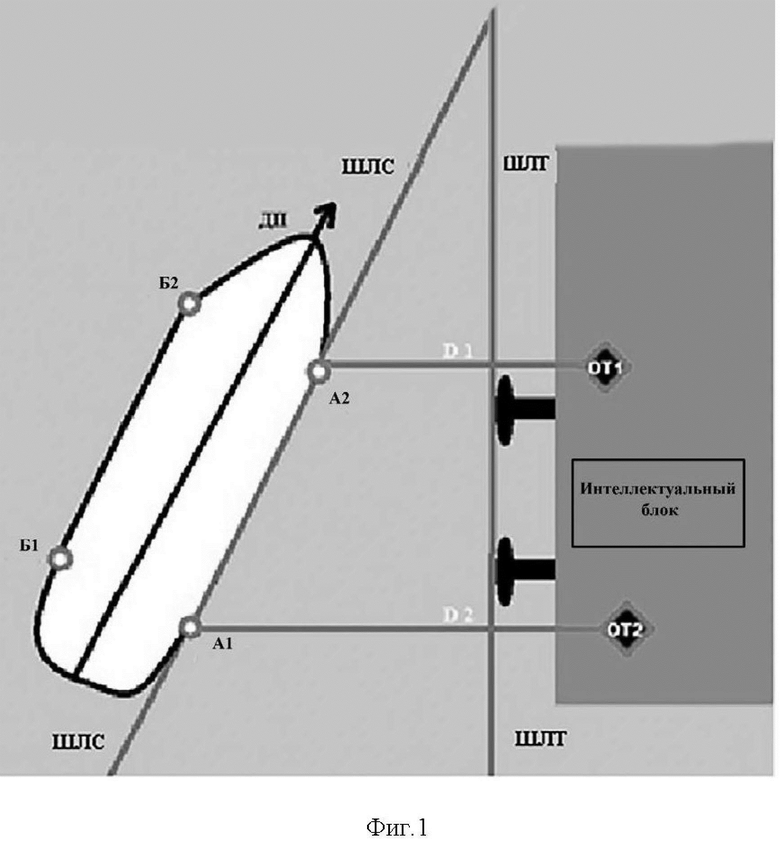
1. Способ управления поперечным и продольным движением судна относительно морского грузового терминала, включающий позиционирование судна в морском пространстве с помощью вычислителей навигационных величин, расположенных в двух опорных точках на корпусе судна, отличающийся тем, что положение судна как подвижного объекта в пространстве ориентируют таким образом, чтобы корпус судна попал в зону действия лазерных дальномеров, видеокамер и микроконтроллеров, устанавливаемых стационарно в двух опорных точках ОТ1 и ОТ2 на поверхности терминала, при этом в пространстве между двумя опорными точками ОТ1 и ОТ2 располагают интеллектуальный блок, обеспечивающий связь подвижного объекта - судна, с неподвижным объектом - морским терминалом, а позиционирование судна относительно морского грузового терминала и определение продольного и поперечного движения судна осуществляют по параметрам треугольника жесткости, образованного пересечением линии, параллельной оси судна - швартовной линии судна (ШЛС), и линии, параллельной линии, соединяющей две опорные точки на терминале, - швартовной линии терминала (ШЛТ), причем расстояние между двумя опорными точками ОТ1и ОТ2 на поверхности терминала определяется параметрами судов, которые подходят к данному причалу.
2. Способ по п. 1, отличающийся тем, что расстояние между опорными точками ОТ1и ОТ2 составляет 75 м.
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СПОСОБ ШВАРТОВКИ СУДНА С ПОМОЩЬЮ ЛАЗЕРНОЙ СИСТЕМЫ | 2015 |
|
RU2613465C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ ТАНКЕРА ПРИ ВЫПОЛНЕНИИ ГРУЗОВЫХ РАБОТ | 2011 |
|
RU2462389C1 |
| УСТРОЙСТВО И УСТАНОВКА ДЛЯ СОЕДИНЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ДВУХ ЛЕКАРСТВЕННЫХ КАПСУЛ ПУТЕМ КЛЕЕВОГО СОЕДИНЕНИЯ | 2011 |
|
RU2574955C2 |
| RU 2776459 C1, 21.07.2022 | |||
| Способ управления движущимся судном | 2015 |
|
RU2615848C1 |

