Изобретение относится к водному транспорту и касается управления судном (далее швартующееся судно) при выполнении им швартовной операции к борту судна партнера по величине поперечных смещений двух точек швартующегося судна, носовой A и кормовой В, от текущего положения траектории сближения с судном партнером (фиг.1).
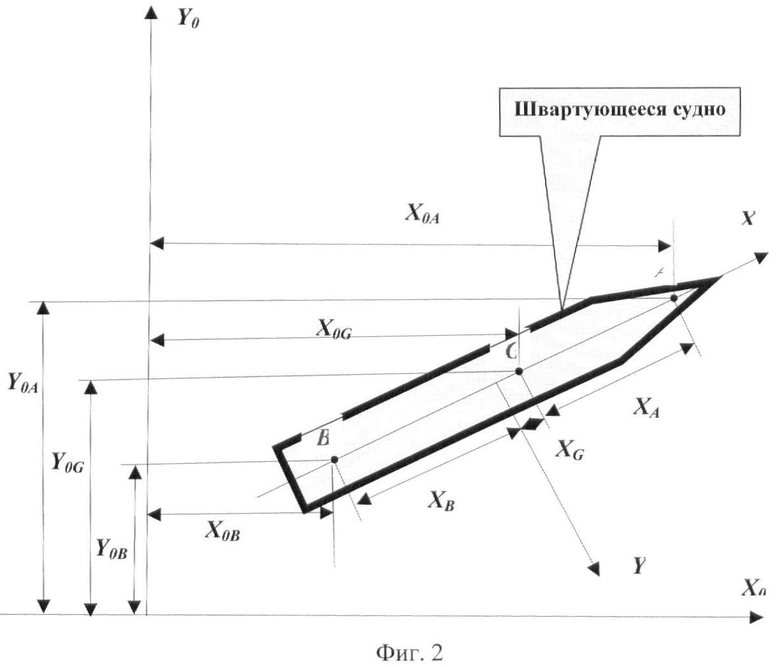
Известен способ управления движением объекта (судна) при выполнении им сближения с другим подвижным объектом (заявка №2006111031/11) по величинам поперечных смещений расположенных на диаметральной плоскости судна носовой А и кормовой В точек от текущего положения траектории сближения, при котором рассчитывают поперечные смещения этих точек; для вычисления поперечных смещений носовой A и кормовой В точек судна их координаты в неподвижной координатной системе A(Х0A, Y0A), В(Х0B, Y0B) (фиг.2) измеряют с помощью спутниковой навигационной системы (СНС) и с дифференциальными поправками, перекладку руля судна производят в зависимости от комбинации поперечных смещений носовой dA и кормовой dB точек судна относительно текущего положения траектории сближения, которое определяют, используя заданную точку как объект, с которым происходит сближение судна, и центр тяжести судна; текущее положение заданной точки и текущее положение центра тяжести судна определяют текущее положение траектория сближения в виде прямой линии, соединяющей текущее положение заданной точки и текущее положение центра тяжести судна G, текущие координаты центра тяжести судна в неподвижной координатной систем рассчитывают по формулам:

где X0G, Y0G - координаты центра тяжести судна в неподвижной координатной системе;
X0A, Y0A - координаты точки А в неподвижной координатной системе;
X0B, Y0B - координаты точки В в неподвижной координатной системе;
XA, XB - абсцисса носовой и кормовой точки судна соответственно в координатной системе (X, Y), связанной с судном;
XG - абсцисса центра тяжести судна в координатной системе, связанной с судном,
текущие координаты заданной точки определяют с помощью спутниковой навигационной системы и с дифференциальными поправками.
Однако в этом способе управления судном, выполняющим сближение с заданной точкой, есть определенный недостаток, препятствующий использованию его в управлении швартующимся судном при выполнении им швартовной операции к борту судна партнера, т.е. при сближении швартующегося судна с судном партнером, так как в алгоритме управления швартующимся судном отсутствуют элементы управления, обеспечивающие условия безопасного выполнения швартовной операции к борту судна партнера.
Условиями безопасного выполнения швартующимся судном швартовной операции к борту судна партнера являются:
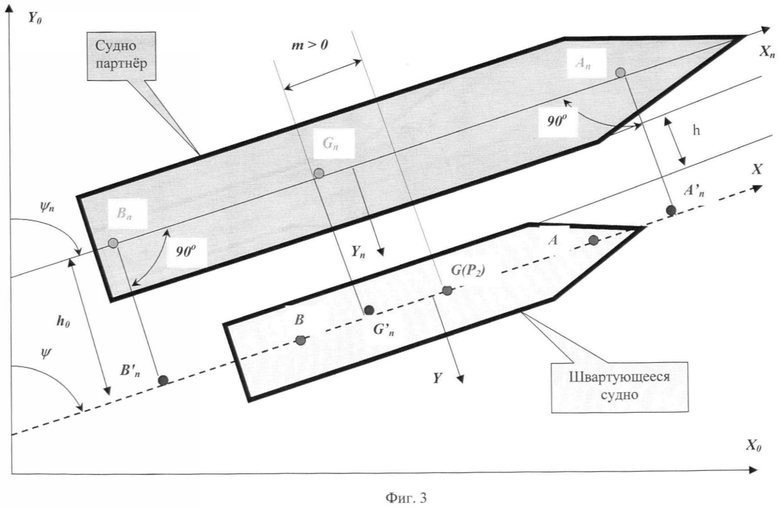
1) равенство скоростей швартующегося судна (υ) и судна партнера (υn) в конечной стадии их сближения, то есть в момент времени, когда швартующееся судно движется параллельно борту судна партнера на минимальном заданном траверзном расстоянии h от борта судна партнера (фиг.3);
2) равенство курсов швартующегося судна (ψ) и судна партнера (ψn) в конечной стадии их сближения (фиг.3);
3) расстояние между бортами швартующегося судна и судна партнера (траверзное расстояние) в конечной стадии их сближения должно иметь определенное с точки зрения взаимной безопасности участвующих в швартовке судов, значение (h) (фиг.3);
4) продольное положение швартующегося судна относительно судна партнера в конечной стадии сближения должно быть фиксированным, то есть расстояние между центром тяжести швартующегося судна (G) и центром тяжести судна партнера (Gn) в неподвижной координатной системе, в направлении продольной оси Хn координатной системы (Хn, Yn), связанной с судном партнером, в конечной стадии их сближения должно иметь определенное заданное значение (m) (фиг.3), причем значение m считается положительным, если центр тяжести швартующегося судна G находится в сторону носа судна партнера относительно положения центра тяжести судна партнера Gn.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в соблюдении условий безопасного выполнения швартовной операции швартующегося судна к борту судна партнера.
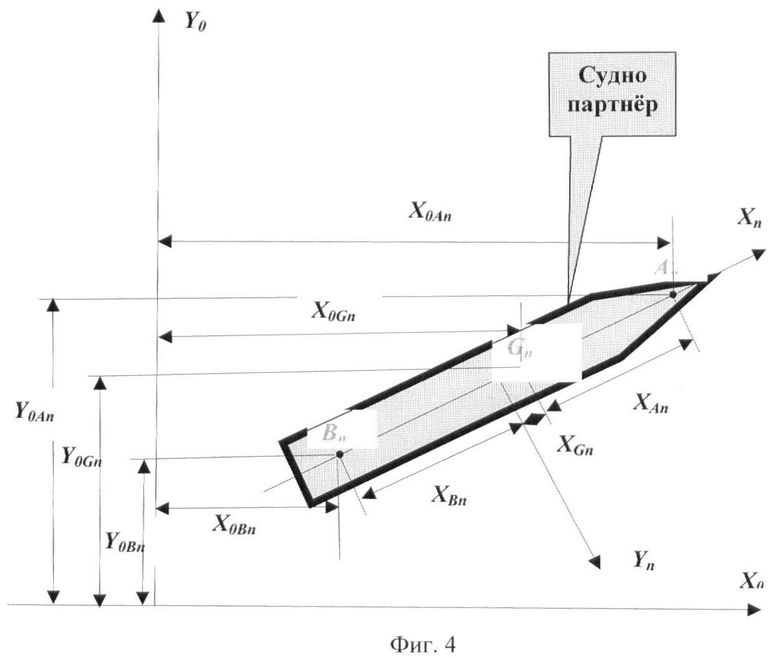
Для достижения указанного технического результата в способе управления швартующимся судном при выполнении им швартовной операции к борту судна партнера по величинам поперечных смещений расположенных на диаметральной плоскости судна носовой А и кормовой В точек от текущего положения траектории сближения, при котором рассчитывают поперечные смещения этих точек; для вычисления поперечных смещений носовой А и кормовой В точек судна их координаты в неподвижной координатной системе A(X0A, Y0A), В(Х0B, Y0B) (фиг.2) измеряют с помощью спутниковой навигационной системы (СНС) и с дифференциальными поправками, перекладку руля судна производят в зависимости от комбинации поперечных смещений носовой dA и кормовой dB точек судна относительно текущего положения траектории сближения, которое определяют используя заданную точку как объект, с которым происходит сближение судна, и центр тяжести судна; текущее положение заданной точки и текущее положение центра тяжести судна определяют текущее положение траектории сближения, проходящей через две точки в виде прямой линии, соединяющей текущее положение заданной точки и текущее положение центра тяжести судна G, текущие координаты центра тяжести судна в неподвижной координатной системе рассчитывают по формулам (1), текущие координаты заданной точки определяют с помощью спутниковой навигационной системы и с дифференциальными поправками, дополнительно определяют с помощью СНС и с дифференциальными поправками координаты носовой Аn(X0An, Y0An) и кормовой Вn(X0Bn, Y0Bn) точек, расположенных на диаметральной плоскости судна партнера (фиг.4) в неподвижной координатной системе, рассчитывают:
1) координаты центра тяжести судна партнера Gn(X0Gn, Y0Gn) в неподвижной координатной системе по формулам:

где X0Gn, Y0Gn - координаты центра тяжести судна партнера в неподвижной координатной системе;
X0An, Y0An - координаты точки Аn в неподвижной координатной системе;
X0Bn, Y0Bn - координаты точки Вn в неподвижной координатной системе;
XAn, XBn - абсцисса носовой и кормовой точек судна партнера соответственно в координатной системе (Хn, Yn), связанной с судном партнером;
XGn - абсцисса центра тяжести судна партнера в координатной системе, связанной с судном партнером;
2) координаты точек  расположенных на перпендикулярах к диаметральной плоскости судна партнера, восстановленных в точки Аn и Вn соответственно, по формулам:
расположенных на перпендикулярах к диаметральной плоскости судна партнера, восстановленных в точки Аn и Вn соответственно, по формулам:
при этом величина отрезков Аn
 =Вn
=Вn
 =h0 определяется с помощью зависимости, представленной формулой:
=h0 определяется с помощью зависимости, представленной формулой:

в выражениях (3) и (4) использованы следующие обозначения:
В - ширина швартующегося судна;
Вn - ширина судна партнера;
ψn - курс судна партнера, значение курса судна партнера ψn рассчитывается с использованием значений координат точек Аn и Вn в неподвижной координатной системе, а именно:

3) координаты проекции центра тяжести судна партнера  в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки
в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки  (фиг.4):
(фиг.4):

4) координаты второй заданной точки Р2(Х0P2, Y0P2) (нумерация заданных точек принята по ходу движения швартующегося судна в направлении судна партнера) в неподвижной координатной системе:

5) координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе:

где ST - тормозной путь швартующегося судна при переходе его со скорости υ=υн к скорости υ=υк=υn (υн - начальная скорость, то есть скорость швартующегося судна в первой заданной точке Р1, υк - конечная скорость, то есть скорость швартующегося судна во второй заданной точке Р2, длина тормозного пути равна расстоянию, проходимому швартующимся судном при переходе его из заданной точки P1 в заданную точку Р2.
Наличие полученных указанным способом данных позволяет осуществлять сближение швартующегося судна с судном партнером в два этапа:
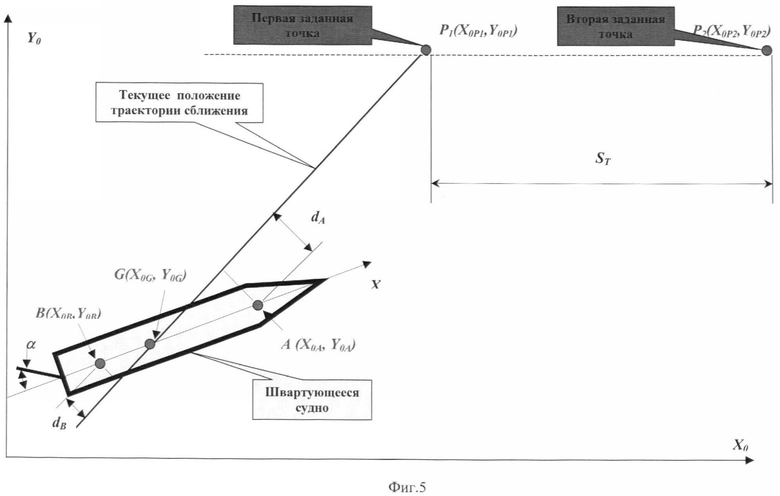
I-й этап - выход швартующегося судна в первую заданную точку P1 (фиг.5). Текущее положение первой заданной точки P1(X0P1, Y0P1) на текущем положении линии, проходящей через текущее положение точек,  текущие координаты которых определяются по формулам (3), определяется величиной отрезка Р1Р2, величина которого равна расстоянию, проходимому швартующимся судном при снижении его текущей скорости ν до значения, равного скорости судна партнера νn, в момент выхода швартующегося судна на траверз судна партнера, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке Р2, что является выполнением одного из условий безопасной швартовки. Управление швартующимся судном во время сближения с судном партнером осуществляется по величинам поперечных отклонений носовой dA и кормовой dB точек швартующегося судна от текущего положения траектории сближения, проходящей через текущее положение центра тяжести швартующегося судна G(X0G, Y0G) и текущего положения первой заданной точки
текущие координаты которых определяются по формулам (3), определяется величиной отрезка Р1Р2, величина которого равна расстоянию, проходимому швартующимся судном при снижении его текущей скорости ν до значения, равного скорости судна партнера νn, в момент выхода швартующегося судна на траверз судна партнера, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке Р2, что является выполнением одного из условий безопасной швартовки. Управление швартующимся судном во время сближения с судном партнером осуществляется по величинам поперечных отклонений носовой dA и кормовой dB точек швартующегося судна от текущего положения траектории сближения, проходящей через текущее положение центра тяжести швартующегося судна G(X0G, Y0G) и текущего положения первой заданной точки
P1(X0P1, Y0P1). Окончание I-го этапа сближения швартующегося судна с судном партнером совпадает с моментом выхода швартующегося судна в первую заданную точку, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке P1.
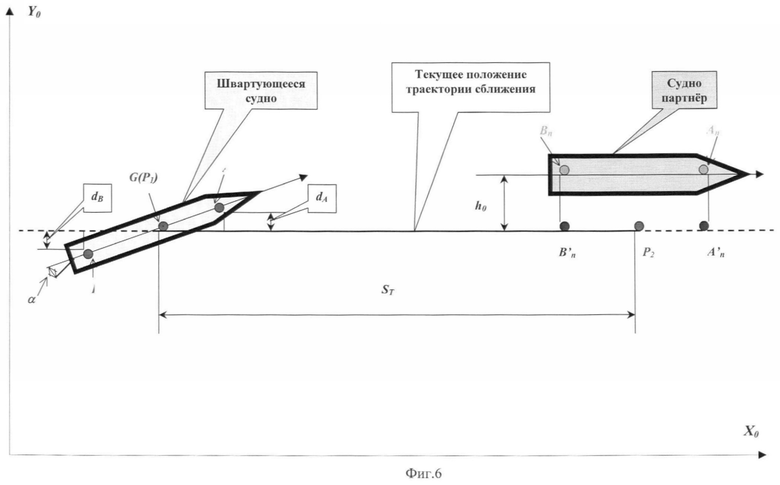
II-й этап - выход швартующегося судна во вторую заданную точку Р2 (фиг.6). Текущее положение второй заданной точки Р2(X0P2, Y0P2) на текущем положении линии, проходящей через точки текущие координаты которых определяются по формулам (3), определяется заданным расстоянием m между центрами тяжести швартующегося судна и судна партнера в конечной стадии швартовки, при этом текущее положение центра тяжести швартующегося судна G (X0G, Y0G) определяется формулами (1), а текущее положение центра тяжести судна партнера Gn(X0Gn, Y0Gn) - формулами (2). Управление швартующимся судном во время сближения с судном партнером осуществляется по величинам поперечных отклонений носовой dA и кормовой dB точек швартующегося судна от текущего положения траектории сближения, в качестве которой используется текущее положение линии, проходящей через точки . Окончание II - го этапа сближения швартующегося судна с судном партнером совпадает с моментом выхода швартующегося судна во вторую заданную точку, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке Р2.
Отличительными признаками предлагаемого способа от указанного выше известного, наиболее близкого к нему, являются следующие:
дополнительно определяют с помощью спутниковой навигационной системы и с дифференциальными поправками координаты носовой Аn(X0An, Y0An) и кормовой Вn(X0Bn, Y0Bn) точек, расположенных на диаметральной плоскости судна партнера в неподвижной координатной системе, рассчитывают:
- координаты центра тяжести судна партнера Gn(X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек  расположенных на перпендикулярах к диаметральной плоскости судна партнера, восстановленных в точки Аn и Вn соответственно;
расположенных на перпендикулярах к диаметральной плоскости судна партнера, восстановленных в точки Аn и Вn соответственно;
- координаты проекции центра тяжести судна партнера  в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки соответственно;
в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки соответственно;
- координаты второй заданной точки Р2(X0P2, Y0P2) в неподвижной координатной системе;
- координаты первой заданной точки Р1(X0P1, Y0P1) в неподвижной координатной системе.
Сближение швартующегося судна с судном партнером выполняется в два этапа:
I-й этап - выход швартующегося судна в первую заданную точку P1.
II-й этап - выход швартующегося судна во вторую заданную точку Р2.
Использование предлагаемого алгоритма управления швартующимся судном позволяет соблюсти условия безопасного выполнения швартовной операции швартующегося судна к борту судна партнера, а именно:
- скорости швартующегося судна (υ) и судна партнера (υn) в конечной стадии их сближения будут равны;
- курсы швартующегося судна (ψ) и судна партнера (ψn) в конечной стадии их сближения будут равны;
- борта швартующихся судов в конечной стадии их сближения будут находиться на установленном безопасном расстоянии h;
- продольное положение швартующегося судна относительно судна партнера в конечной стадии сближения будет соответствовать установленному заранее значению.
Предлагаемый способ управления судном при выполнении им швартовной операции к борту судна партнера осуществляется следующим образом. В пределах контуров швартующегося судна и судна партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу А (швартующееся судно),
An(судно партнер), другая - в корме В (швартующееся судно) (фиг.2, фиг.4), Вn (судно партнер) относительно мидель-шпангоута соответствующего судна. Расстояние между точками А и В, Аn и Вn выбирают в зависимости от технической возможности размещения в указанных точках приемных антенн СНС. Чем больше это расстояние, тем качественней работа системы управления движением швартующегося судна, осуществляющего сближение с судном партнером.
Координаты точек А и В, Аn и Вn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на суда дифференциальные поправки. Используя значения координат точек швартующегося судна А(Х0А, Y0A), В(Х0В, Y0B) и судна партнера Аn(Х0Аn, Y0An), Вn(Х0Вn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном А(ХА, YA), В(ХВ, YВ) и судном партнером Аn(ХАn, YAn), Вn(ХВn, YBn), координаты центров тяжести швартующегося судна в связанной с ним подвижной координатной системе G(XG, YG) и судна партнера в связанной с ним подвижной координатной системе Gn(X0Gn, Y0Gn), а также значения параметров h и m рассчитывают:
- координаты центра тяжести швартующегося судна G (X0G, Y0G) в неподвижной координатной системе по формулам (1);
- координаты центра тяжести судна партнера Gn(X0Gn, Y0Gn), в неподвижной координатной системе по формулам (2);
- координаты точек расположенных на перпендикулярах к диаметральной плоскости судна партнера, восстановленных в точки Аn и Вn соответственно, по формулам (3), (4), (5);
- координаты проекции центра тяжести судна партнера  в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки по формулам (6);
в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки по формулам (6);
- координаты второй заданной точки Р2(X0P2, Y0P2) в неподвижной координатной системе по формулам (7);
- координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе по формулам (8).
Зная координаты первой заданной точки и координаты центра тяжести швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1(X0P1, Y0P1) и центр тяжести швартующегося судна G(X0G, Y0G). После этого определяют поперечные смещения точек А и В от найденной указанным способом траектории сближения по формулам: 
Непрерывно определяемые значения координат точек А и В, Аn и Вn, позволяют непрерывно вычислять координаты центра тяжести швартующегося судна G и первой заданной точки P1, поперечные смещения dA и dв точек А и В швартующегося судна от текущего положения траектории сближения. Причем поперечное смещение рассматриваемой точки относительно текущего положения траектории сближения считается положительным, если она смещается вправо от траектории, и отрицательным, если она смещается влево.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:

где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения. Это положительные величины, причем кА больше kв. Угол перекладки руля α считается положительным при его перекладке в сторону правого борта швартующегося судна.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат центра тяжести швартующегося судна G(X0G, Y0G) и координат первой заданной точки P1(X0G, Y0P1) (X0G=X0P1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой Р2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки координаты которых рассчитываются непрерывно по формулам (3), (4), (5). Как известно, текущие координаты второй заданной точки Р2(X0P2, Y0P2), лежащей на линии  вычисляются непрерывно по формулам (7).
вычисляются непрерывно по формулам (7).
Непрерывно определяемые значения координат точек А и В, Аn и Вn позволяют непрерывно вычислять координаты точек , центра тяжести швартующегося судна G и центра тяжести судна партнера Gn, второй заданной точки Р2 в неподвижной координатной системе, поперечные смещения dA и dB точек А и В швартующегося судна от текущего положения траектории сближения, которой является линия  :
:
Причем поперечное смещение рассматриваемой точки относительно текущего положения траектории сближения считается положительным, если она смещается вправо от траектории, и отрицательным, если она смещается влево.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:

где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения. Это положительные величины, причем kА больше kВ. Угол перекладки руля α считается положительным при его перекладке в сторону правого борта швартующегося судна.
Моментом окончания сближения швартующегося судна с судном партнером считается момент выхода швартующегося судна во вторую заданную точку Р2, что соответствует равенству координат центра тяжести швартующегося судна и второй заданной точки, то есть
Х0G=Х0P2, Y0G=Y0P2.
В результате применения данного изобретения достигается возможность получения технического результата - повышение безопасности управления швартующимся судном и точности выполнения швартовной операции при выполнении ее швартующимся судном к борту судна партнера, находящегося в движении, таким образом, предлагаемый способ управления судном при выполнении им швартовной операции к борту судна партнера соответствует критерию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2010 |
|
RU2422326C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2011 |
|
RU2475410C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА, СТОЯЩЕГО НА ЯКОРЕ | 2012 |
|
RU2509031C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА-ПАРТНЕРА, ЛЕЖАЩЕГО В ДРЕЙФЕ | 2012 |
|
RU2509029C1 |
| Способ управления судном при выполнении им швартовной операции к борту судна партнёра | 2019 |
|
RU2714994C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| Способ управления судном при выполнении движения по заданной траектории | 2023 |
|
RU2827122C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2019 |
|
RU2713434C1 |
| Способ управления движущимся судном | 2015 |
|
RU2615849C1 |
| Способ управления поперечным и продольным движением судна относительно морского грузового терминала | 2024 |
|
RU2834495C1 |
Изобретение относится к водному транспорту, в частности к управлению движением швартующегося судна при выполнении им швартовной операции к судну партнеру. Текущее положение траектории сближения определяется в виде прямой линии, проходящей через две точки на плоскости, одна из которых - центр тяжести швартующегося судна, вторая - заданная точка. Способ управления заключается в том, что для обеспечения безопасности швартовной операции сближение выполняется в два этапа, при этом на каждом этапе сближения используется своя заданная точка на плоскости. Положение заданных точек на плоскости в любой заданный момент времени рассчитывается с использованием значений текущих координат носовой и кормовой точек судна партнера, заданного расстояния между бортами швартующихся судов, заданного положения швартующегося судна относительно судна партнера в конечной стадии швартовки и тормозного пути швартующегося судна, необходимого для перехода его от исходной скорости движения к скорости, равной скорости судна партнера. Достигается безопасное выполнение швартовной операции швартующегося судна к борту судна партнера. 3 з.п. ф-лы, 6 ил.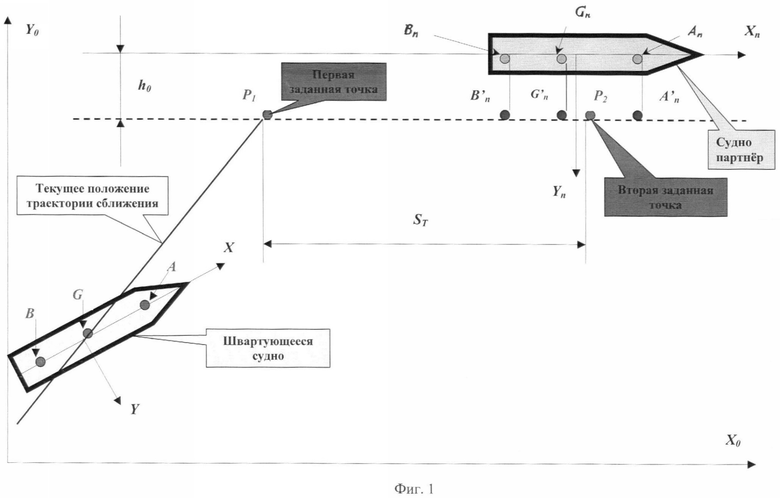
1. Способ управления швартующимся судном при выполнении им швартовной операции к борту судна партнера по величинам поперечных смещений, расположенных на диаметральной плоскости судна, его носовой А и кормовой В точек от текущего положения траектории сближения, при котором рассчитывают поперечные смещения этих точек; для вычисления поперечных смещений носовой А и кормовой В точек судна их координаты в неподвижной координатной системе А(Х0А, Y0A), В(Х0B, Y0B) измеряют с помощью спутниковой навигационной системы (СНС) и с дифференциальными поправками; перекладку руля судна производят в зависимости от комбинации поперечных смещений носовой dA и кормовой dB точек судна относительно текущего положения траектории сближения, которое определяют используя заданную точку как объект, с которым происходит сближение судна и центр тяжести судна; текущее положение заданной точки и текущее положение центра тяжести судна определяют текущее положение траектории сближения, проходящей через две точки в виде прямой линии, соединяющей текущее положение заданной точки и текущее положение центра тяжести судна G, текущие координаты центра тяжести судна в неподвижной координатной системе рассчитывают по формулам:
Y0G=Y0A-[(Y0A-Y0B)·(XA-XG)]/(XA-XB);
X0G=X0A-[(X0A-X0B)·(XA-XG)]/(XA-XB);
текущие координаты заданной точки определяют с помощью спутниковой навигационной системы и с дифференциальными поправками, отличающийся тем, что дополнительно определяют с помощью СНС и с дифференциальными поправками координаты носовой Аn(X0An, Y0An) и кормовой Вn(X0Bn, Y0Bn) точек, расположенных на диаметральной плоскости судна партнера в неподвижной координатной системе, рассчитывают:
координаты центра тяжести судна партнера Gn(X0Gn, Y0Gn) в неподвижной координатной системе по формулам:
Y0Gn=Y0An-[(Y0An-Y0Bn)·(XAn-XGn)]/(XAn-XBn);
X0Gn=X0An-[(X0An-X0Bn)·(XAn-XGn)]/(XAn-XBn);
где X0Gn, Y0Gn - координаты центра тяжести судна партнера в неподвижной координатной системе;
X0An, Y0An - координаты точки Аn в неподвижной координатной системе;
X0Bn, Y0Bn - координаты точки Вn в неподвижной координатной системе;
XAn, XBn - абсцисса носовой и кормовой точки судна партнера соответственно, в координатной системе (Хn, Yn), связанной с судном партнером;
XGn - абсцисса центра тяжести судна партнера в координатной системе, связанной с судном партнера;
координаты точек  расположенных на перпендикулярах к диаметральной плоскости судна партнера, восстановленных в точки Аn и Вn соответственно, по формулам:
расположенных на перпендикулярах к диаметральной плоскости судна партнера, восстановленных в точки Аn и Вn соответственно, по формулам:
XA'n=XAn+[h+0,5(B+Bn)]·cosψn;
YA'n=YAn-[h+0,5(B+Bn)]·sinψn;
XB'n=XBn+[h+0,5(B+Bn)]·cosψn;
YB'n=YBn-[h+0,5(B+Bn)]·sinψn,
при этом величина отрезков An 
 определяется с помощью зависимости, представленной формулой: h0=h+0,5(B+Bn), где В - ширина швартующегося судна; Вn - ширина судна партнера; ψn - курс судна партнера, значение курса судна партнера ψn рассчитывается с использованием значений координат точек An и Вn в неподвижной координатной системе, а именно: ψn=arctg[(X0An-X0Bn)/(Y0An-Y0Bn)];
определяется с помощью зависимости, представленной формулой: h0=h+0,5(B+Bn), где В - ширина швартующегося судна; Вn - ширина судна партнера; ψn - курс судна партнера, значение курса судна партнера ψn рассчитывается с использованием значений координат точек An и Вn в неподвижной координатной системе, а именно: ψn=arctg[(X0An-X0Bn)/(Y0An-Y0Bn)];
координаты проекции центра тяжести судна партнера  в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки
в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно диаметральной плоскости судна партнера через точки 
координаты второй заданной точки Р2(Х0P2, Y0P2) в неподвижной координатной системе:
координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе:
где ST - тормозной путь швартующегося судна при переходе его со скорости ν=νH к скорости ν=νк=νn, где νн - начальная скорость, то есть скорость швартующегося судна в первой заданной точке P1, νк - конечная скорость, то есть скорость швартующегося судна во второй заданной точке P2, длина тормозного пути равна расстоянию, проходимому швартующимся судном при переходе его из заданной точки P1 в заданную точку P2; полученные указанным способом данные позволяют осуществлять сближение швартующегося судна с судном партнером в два этапа:
I-й этап - выход швартующегося судна в первую заданную точку P1, при этом текущее положение первой заданной точки P1(X0P1, Y0P1) на текущем положении линии, проходящей через текущее положение точек 
определяется величиной отрезка P1P2, длина которого равна расстоянию, проходимому швартующимся судном при снижении его текущей скорости ν до значения равного скорости судна партнера νn, в момент выхода швартующегося судна на траверз судна партнера, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке Р2; управление швартующимся судном во время сближения с судном партнером осуществляется по величинам поперечных отклонений носовой dA и кормовой dB точек швартующегося судна от текущего положения траектории сближения, проходящей через текущее положение центра тяжести швартующегося судна G(X0G, Y0G) и текущего положения первой заданной точки P1(X0P1, Y0P1), окончание I-го этапа сближения швартующегося судна с судном партнером совпадает с моментом выхода швартующегося судна в первую заданную точку, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке P1;
II-й этап - выход швартующегося судна во вторую заданную точку Р2, при этом текущее положение второй заданной точки Р2(Х0P2, Y0P2) на текущем положении линии, проходящей через точки  определяется заданным расстоянием m между центрами тяжести швартующегося судна и судна партнера в конечной стадии швартовки, управление швартующимся судном во время сближения с судном партнером осуществляется по величинам поперечных отклонений носовой dA и кормовой dB точек швартующегося судна от текущего положения траектории сближения, в качестве которой используется текущее положение линии, проходящей через точки
определяется заданным расстоянием m между центрами тяжести швартующегося судна и судна партнера в конечной стадии швартовки, управление швартующимся судном во время сближения с судном партнером осуществляется по величинам поперечных отклонений носовой dA и кормовой dB точек швартующегося судна от текущего положения траектории сближения, в качестве которой используется текущее положение линии, проходящей через точки  окончание II-го этапа сближения швартующегося судна с судном партнером совпадает с моментом выхода швартующегося судна во вторую заданную точку, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке P2.
окончание II-го этапа сближения швартующегося судна с судном партнером совпадает с моментом выхода швартующегося судна во вторую заданную точку, то есть в момент, когда центр тяжести швартующегося судна будет находиться в точке P2.
2. Способ по п.1, отличающийся тем, что в процессе швартовной операции непрерывно определяют координаты носовой и кормовой точек судна партнера с помощью спутниковой навигационной системы и с дифференциальными поправками.
3. Способ по п.1, отличающийся тем, что текущие координаты первой заданной точки и второй заданной точки, для соблюдения условий безопасности швартовной операции, рассчитываются с использованием значений текущих координат носовой Аn(X0An, Y0An) и кормовой Вn(X0Bn, Y0Bn) точек судна партнера, заданного расстояния между бортами швартующихся судов h и заданного положения швартующегося судна относительно судна партнера в конечной стадии швартовки m, тормозного пути швартующегося судна ST при переходе его от исходной скорости движения ν к скорости, равной скорости судна партнера νn.
4. Способ по п.1, отличающийся тем, что сближение швартующегося судна с судном партнером осуществляется в два этапа:
I-й этап - сближение с первой заданной точкой;
II-й этап - сближение со второй заданной точкой.
| RU 2006111031 A, 10.11.2007 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2297362C1 |
| МЯГКИЙ ПОЛИМЕРНЫЙ РЕЗЕРВУАР ДЛЯ ВОДЫ И НЕФТЕПРОДУКТОВ | 2010 |
|
RU2424967C1 |
| JP 8119197 A, 14.05.1996. | |||

