(54) СИСТЕМА АВТОМАТИЧЕСКОГО УДЕРЖАНИЯ СУДНА НАД ЗАДАННОЙ ТОЧКОЙ МОРСКОГО ДНА
1
Изобретение относится к судовой автоматизации и может быть использовано для стабилизации судов над заданной точкой морского дна, например при проведении разведки и добычи полезных ископаемых дна Мирового океана, проведении спасательных, научно-исследовательских работ с судов в режиме динамической стоянки.
Известна система автоматического удержания судна над заданной точкой морского дна, содержащая измеритель линейных перемещений и угла курса судна, подключенные к одному и другому входам счетнорешающего блока, связанного с приводом исполнительных средств активного управления перемещением судна, датчики направлений и скоростей ветра и течения и устройство оптимизации велич,ин и направлений упоров средств активного управления перемещением судна 1.
Недостатком указанной системы является невысокая точность и низкая экономичность стабилизации при воздействии переменных внешних возмущений, например шквалистых ветров.
Цель изобретения - повышение точности стабилизации судна при повышении экономичности системы.
Поставленная цель достигается тем, что система снабжена подключенным к датчикам направлений и скоростей ветра и течения блоком вычисления оптимального угла ориентирования и формирования компенсирующего воздействия, один и другой выходы которого подключены соответственно но к третьему входу счетно-решающего блока и одному из входов устройства оптимизации величин и направлений упоров средств активного управления перемещением судна, другой вход которого соединен с выходом счетно-рещающего блока, 15 а выход - с приводом исполнительных средств активного управления перемещением судна.
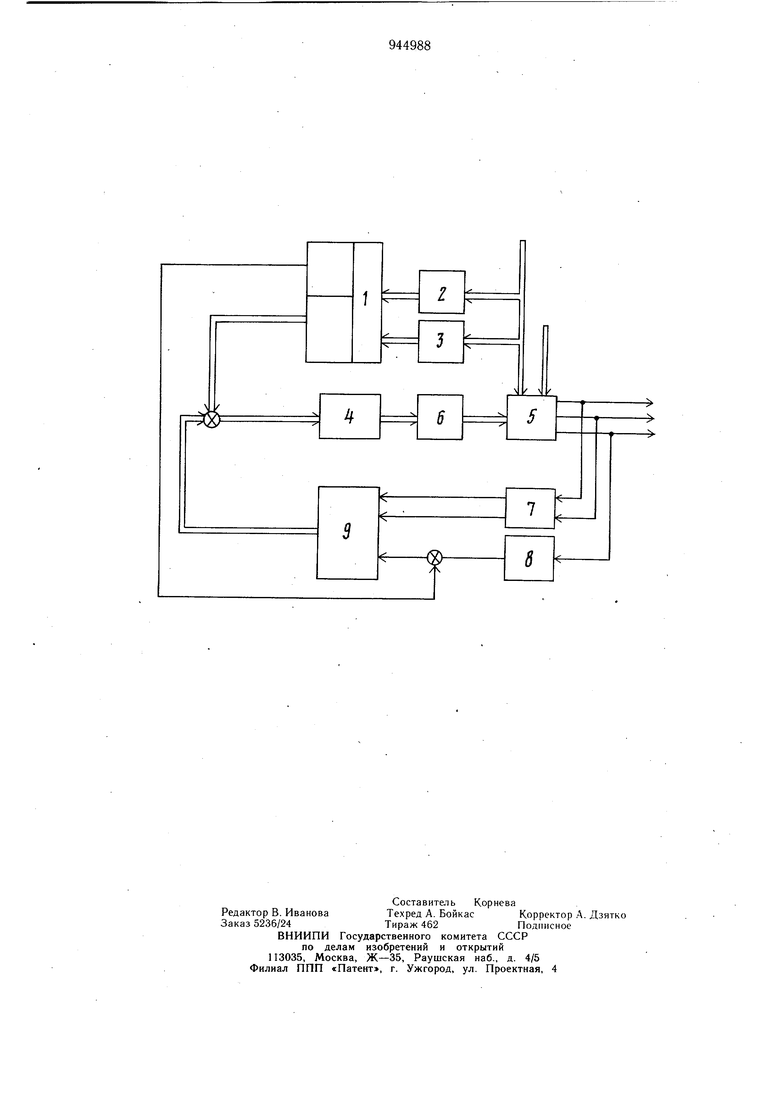
На чертеже представлена функциональная схема системы.
20 Система содержит блок 1 вычисления оптимального угла ориентирования и фор.мирования компенсирующих воздействий, подключенный своими входами к датчикам скоростей 2 и направления 3 ветра и течения, а одним выходом к устройству 4 оптимизации величи-н и направлений упоров средств активного управления перемещением судна 5, причем выход устройства 4 связан с приводом 6 исполнительных средств активного управления, измерители линейных перемещений 7 и угла курса 8, подключенные к счетно-решающему блоку 9, выход которого связан с устройством 4. Система работает следующим образом. По сигналам от датчиков 2 и 3 в блоке 1 вычисления оптимального угла курса и формирования компенсирующего воздействия определяются величины компонент возмущ-ающих сил и оптимальный угол курса судна. Сигналы, соответствующие силам, которые необходимо развить для компенсации внешних возмущений, через суммирующие входы устройства 4 оптимизации величин и направлений упоров средств активного управления поступают на входы привода б исполнительных средств активного управления и приводят к появлению сил упоров, компенсирующих соответствующие внешние возмущения. Разность между указанным оптимальным углом курса, совозмущениямответствующим внешним и углом курса, измеренным датчиком 8 угла курса, также как и информация о горизонтальных перемещениях судна относительно заданного положения, измеренных датчиками 7, поступают в счетно-рещающий блок 9, вырабатывающий сигналы, соответствующие управлениям, приводящим судно к положению над заданной точкой морского дна и оптимальному углу курса. Сигналы управления, необходимые для ликвидации отклонения, поступают на суммирующие входы устройства 4 оптимизации величин и направлений упоров средствактивного управления, которое перераспределяет суммарную нагрузку по созданию необходимых компонент упоров средств активного управления между несколькими средствами активного управления, обеспечивая при этом минимум затрат энергии, затрачиваемой на управление в каждый момент времени. Наличие в составе системы контура компенсации, состоящего из датчиков 2 и 3 блока I, устройства 4 и привода б, контура управления курсом судна, включающего в себя датчик 8, блок 7, устройство 3, связанного с приводом 6 совместно с подсистемой выработки оптимального угла курса (датчики 8 и 3 и блок 2), а также использование устройства 4 оптимизации величины и направления упоров средств активного управления, осуществляющего оптимальное перераспределение нагрузки между несколькими средствами активного управления, развивающими необходимые для управления силы и момент, позволяют устанавливать на судне средства активного управления меньщей мощности и меньщее их число, что приводит к упрощению системы стабилизации, повышению ее точности при повышении экономичности системы. Формула изобретения Система автоматического удержания судна над заданной точкой морского дна, содержащая измерители линейных перемещений и угла курса судна, подключенные к одному и другому входам счетно-решающего блока, связанного с приводом исполнительных средств активного управления перемещением судна, датчики направлений и скоростей ветра и течения, и устройство оптимизации величин и направлений упоров средств активного управления перемещением судна, отличающаяся тем, что, с целью повышения точности стабилизации судна при повышении экономичности системы, она снабжена подключенным к датчикам направлений и скоростей ветра и течения блоком вычисления оптимального угла ориентирования и формирования компенсирующего воздействия, один и другой выходы которого подключены соответственно к третьему входу счетно-решающего блока и одному из входов устройства оптимизации величин и направлений упоров средств активного управления перемещением судна. другой вход которого соединен с выходом счетно-решающего блока, а выход - с приводом исполнительных средств активного управления перемещением судна. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 583032, кл. В 63 Н 25/00, 23.02.76 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления положением бурового судна | 1976 |
|
SU753715A1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Устройство для стабилизации положения бурового судна | 1974 |
|
SU574703A1 |
| Система для динамической стабилизации судна | 1980 |
|
SU878646A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |