Изобретение относится к ракетно-космической технике и может быть использовано для проведения летно-конструкторских испытаний (ЛКИ) автономного стыковочного модуля (АСМ) космической системы по очистке орбит от космического мусора типа отработанных ступеней ракет-носителей (РН).
Известен способ и устройство по пат. РФ №2462399 от 27.09.2012 «Способ увода космического мусора с орбит полезных нагрузок на основе использования отделившейся части разгонного блока РН и устройство для его реализации», в котором с помощью отделяемого отделяющейся части ракетоносителя ОЧ РН или РБ малоразмерного космического буксира (МКБ), связанного механической связью с ОЧ РН или РБ тросом, осуществляют стыковку МКБ с космическим мусором, после чего прилагают тормозной импульс к ОЧ ступени РН или РБ на основе использования невыработанных запасов жидкого топлива для увода связки «ОЧ ступени РН, РБ - трос - МКБ - космический мусор» на орбиту утилизации. Устройство для увода космического мусора содержит ОЧ ступени РН, РБ с ракетной двигательной установкой, тросовую систему с управляемым приводом тросового барабана, жестко связанную с ОЧ ступени РН или РБ, МКБ с аппаратурой обнаружения космического мусора и самонаведения, устройство стыковки. Достигается возможность увода космического мусора, находящегося на орбитах с близкими параметрами к орбитам.
Наиболее близкий к предлагаемому решению является способ очистки орбит от крупногабаритного космического мусора по пат. РФ №2531679 от 27.10.2014 г., основанный на выведении космического аппарата-буксира (КАБ) и ACM в области орбит, предназначенных для их очистки от объектов космического мусора, последовательных маневров дальнего и ближнего наведения для стыковки и захвата объектов и их спуск на орбиты утилизации, выбор последовательности объектов, из имеющихся на орбитах для их спуска на орбиты утилизации, осуществлении путем последовательного сравнения значения критерия для каждой предполагаемой к спуску мишени, например, вероятности столкновения объектов с другими космическими объектами, а компенсацию накопленных ошибок параметров движения КАБ при предыдущих маневрах, а также системы целеуказания распределяют между корректирующими импульсами КАБ на этапе дальнего наведения и АСМ на участке самонаведения из условия обеспечения относительных параметров движения КАБ и объекта на начало этапа самонаведения АСМ, соответствующих вероятности стыковки и захвата объекта не ниже заданной.
Прямое использование этого технического решения для проведения ЛКИ элементов космической системы, например, АСМ по очистке орбит от космического мусора (далее мишени) связано с рядом недостатков, прежде всего:
а) выбор последовательности мишеней для их спуска с орбиты, а при проведении ЛКИ речь идет, как правило, об одной мишени, особенно на первых этапах создания такой системы;
б) выбор критерия для каждой предполагаемой к спуску мишени, например, из условия вероятности столкновения, что не ставится в качестве задач при проведении ЛКИ, конечно, это важно и желательно, но целями ЛКИ является отработка технических решений по АСМ, отработки схем и устройств захвата мишени, схем взаимодействия с КАБ, далее разгонный блок (РБ) и т.д.
в) ЛКИ отдельных элементов перспективных космических систем проводятся, как правило, с минимальными затратами средств, в частности, при использовании попутных пусков РН для выведения целевых полезных нагрузок (КАпн) на конкретные орбиты.
С другой стороны, использование попутных пусков РН для проведения ЛКИ для АСМ с одновременным выведения КАпн на конкретные орбиты приводит к следующей технической проблеме - выбору возможной мишени из находящихся на орбитах в близости к орбите КАпн при удовлетворении следующих ограничений:
а) составная полезная нагрузка (РБ + КАпн + АСМ) должна обеспечиваться энергетическими возможностями РН, РБ для:
- выведения КАпн на орбиту полезной нагрузки,
- маневров дальнего наведения на мишень связки (РБ + АСМ) с помощью остаточной энергетики РБ;
- создание связки (РБ + АСМ + мишень) с помощью АСМ и остаточной энергетики РБ;
- маневр по спуску связки (РБ + АСМ + мишень) в заданный район падения на поверхности Земли с помощью остаточной энергетики РБ;
б) время активного функционирования Тф существующих РБ на орбите ограничено из-за емкости электрических батарей, следовательно, время на проведение всех событий ТΣ, включающее в себя:
- выведение КАпн на орбиту Твыв,
- маневры дальнего Тдн, ближнего наведения на мишень Тбн,
- стыковка с мишенью и торможение вращения связки (АСМ + мишень) и формирование связки (РБ + АСМ + мишень) Тст,
- маневр по спуску связки (РБ + АСМ + мишень) Тсп,
не должно превышать Тф.
Это ограничение по времени функционирования штатных РБ, возможных для использования при ЖИ, приводит к резкому сокращению областей орбит полезных нагрузок, масс полезных нагрузок КАпн и мишеней.
Для проведения ЛКИ используются существующие средства выведения (РН, РБ), с заданными тактико-техническими характеристиками, а создаваемый АСМ имеет проектные параметры, например, длительность активного пребывания на орбите может составлять несколько суток (по типу космических аппаратов с длительными сроками активного существования).
Цель предлагаемого технического решения заключается в устранении указанных недостатков, за счет того, что в известном техническом решении по способу очистки орбит от объектов космического мусора, основанном на выборе мишени из имеющихся на орбитах для их увода на орбиты утилизации, выведении с помощью ракеты-носителя, разгонного блока (РБ) и АСМ в область орбиты, предназначенной для очистки от объектов космического мусора (мишеней), маневров дальнего и ближнего наведения для стыковки и захвата мишени, увод на орбиту утилизации, вводят дополнительные действия:
1) ЛКИ проводят при попутном пуске ракеты-носителя для выведения полезной нагрузки КАпн на заданную орбиту,
2) при этом выбор полезной нагрузки КАпн и ее орбиты, мишени и ее орбиты, осуществляют из условия обеспечения возможности реализации маневров дальнего, ближнего наведения на мишень связки (РБ + АСМ) с помощью РБ после отделения КАпн, стыковки, маневр по спуску связки (РБ + АСМ + мишень) в заданный район падения на поверхности Земли с помощью РБ,
3) а время на реализации всех событий не должно превышать времени активного функционирования РБ.
Обоснование возможности реализуемости предлагаемого технического решения.
Под выбором КАпн подразумеваются выбор орбиты, на какую он будет выводится с помощью РН, его масса и габариты, под выбором мишени подразумевается выбор технических характеристик мишени (масса ступени), параметры орбиты, угловые скорости вращения ступени относительно центра масс.
Под временем реализации всех событий подразумевается интервал времени от старта РН до завершения отработки импульса маневра РБ при переходе на орбиту утилизации.
В задачи ЛКИ входят:
- отработка системы стыковки различных типов, например, система штырь-конус, робот-рука и т.д.;
- механизмы разворачивания и сворачивания троса при наличии тросовой системы;
- узлы системы стыковки и захвата;
- торможение вращения ступени с помощью АСМ;
- двигательная установка АСМ и т.д.
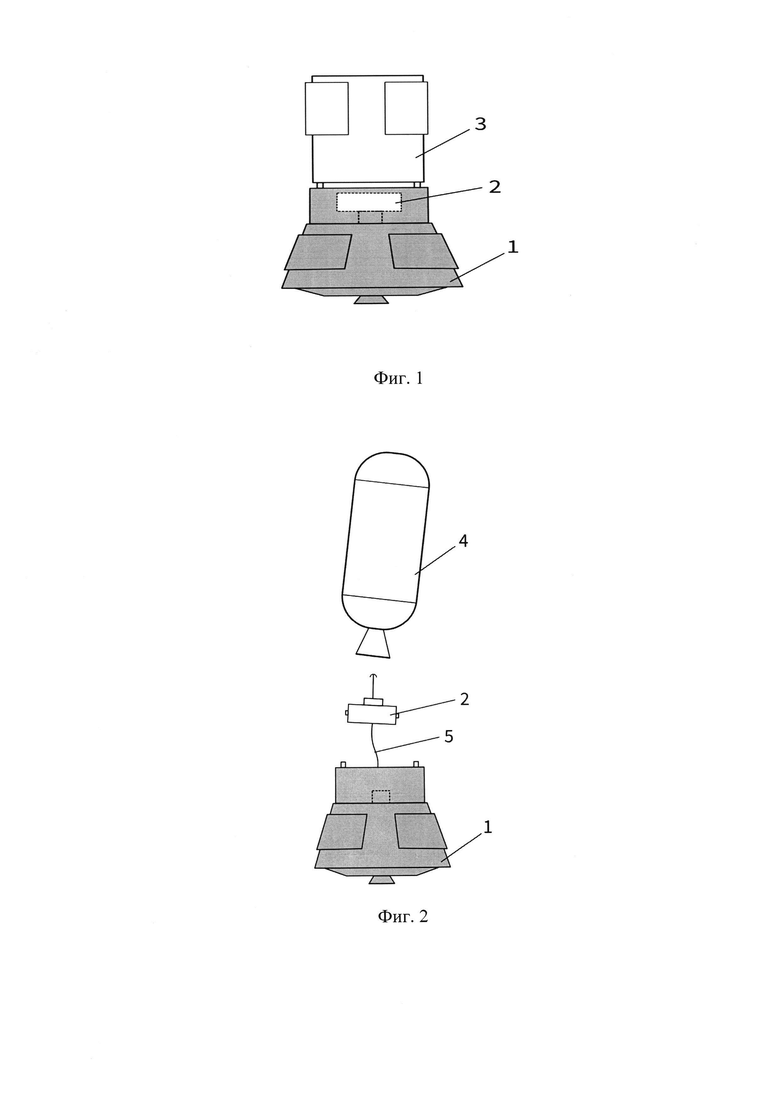
На фиг. 1 приведена комплектация составной полезной нагрузки в головном блоке, в том числе: 1 - РБ; 2 - АСМ; 3 - КАпн.
На фиг. 2 показано РБ 1, АСМ 2, мишень 4 и трос 5, соединяющий АСМ с РБ на всех этапах их относительного движения. В качестве примера одной из возможных схем стыковки приведена тросовая система, используемая в патенте-аналоге №2462399.
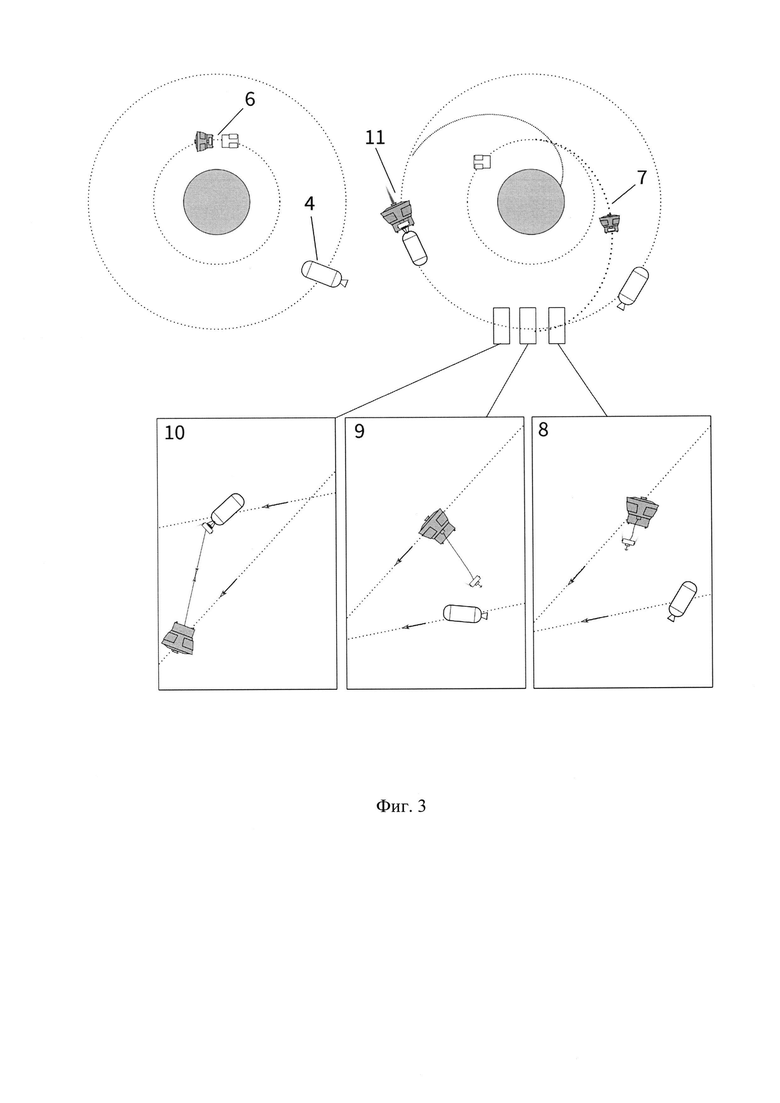
На фиг. 3 приведена схема последовательности выведения КАпн и проведения ЛКИ, в том числе: 6 - отделение КАпн; 7 - маневр дальнего наведения связки (РБ + АСМ) за счет энергетики РБ: 8 - отделение АСМ от РБ на тросе за счет энергетики АСМ; 9 - маневр ближнего наведения АСМ на мишень за счет энергетики АСМ; 10 - захват мишени с помощью АСМ; торможение вращения связки (АСМ + мишень) за счет энергетики АСМ; 11 - стыковка связки (АСМ + мишень) с РБ с помощью энергетики РБ, АСМ, тросовой системы и маневр связки (РБ + АСМ + мишень) на орбиту утилизации за счет энергетики РБ.
При планировании проведения ЛКИ осуществляют следующие действия, направленные на выбор РН, РБ, КАпн, мишени:
- выбирают КАпн (масса и габариты) и, соответственно, орбиту, на которую он выводится, с помощью конкретной РН, например, «Союз-2.1в» с разгонным блоком «Волга»;
- оценивают возможность размещения составной полезной нагрузки (РБ + АСМ + КАпн) под штатным обтекателем РН и в случае его размещения, осуществляют следующий шаг;
- оценивают энергетические запасы в РБ после выведения КАпн на заданную орбиту для совершения маневра дальнего наведения связки (РБ + АСМ) на ближайшую мишень и маневр спуска с орбиты связки (РБ + АСМ + мишень) на орбиту утилизации и, в случае достаточности энергетики осуществляют следующий шаг;
- оценивают необходимые запасы энергетики на АСМ для реализации этапа ближнего наведения, торможения связки (АСМ + мишень);
- оценивают общее время на реализацию всех событий ТΣ и сравнивают его с временем активного существования РБ и, в случае ТΣ<Тф, осуществляют проведение ЛКИ АСМ в выбранном составе РН, РБ, КАпн, мишени.
В том случае, если не выполняются условия на каком-либо шаге, то выбирают другой целевой запуск РН с целевой полезной нагрузкой КАпн (масса и орбита), другим РБ, выбирают другую мишень для проведения ЛКИ.
Таким образом, необходимо определить возможную по массе и параметрам орбиту полезной нагрузки КАпн, тип РН, РБ, возможную мишень для проведения ЛКИ (с минимальной скоростью вращения, параметрами орбиты, массоцентровочными характеристиками, точностью прогноза координат и скоростей центра масс и вокруг центра масс), возможные параметры АСМ.
Использование предлагаемого технического решения позволяет существенно снижать затраты при проведении ЛКИ перспективных образцов ракетно-космических систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| Способ очистки орбит от объектов космического мусора | 2018 |
|
RU2676368C1 |
| РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 2016 |
|
RU2643744C2 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ СИСТЕМОЙ ПРИ ВЫПОЛНЕНИИ ПЕРЕЛЁТА НА ВЫСОКОЭНЕРГЕТИЧЕСКУЮ ОРБИТУ | 2020 |
|
RU2759372C1 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2605463C2 |
| Способ управления движением сложной формации группы космических аппаратов | 2017 |
|
RU2683700C1 |
Изобретение относится к ракетно-космической технике. Способ проведения летно-конструкторских испытаний (ЛКИ) автономного стыковочного модуля (АСМ) для очистки орбит от крупногабаритного космического мусора основан на выборе мишени из имеющихся на орбитах для их увода на орбиты утилизации, выведении с помощью ракеты-носителя, разгонного блока (РБ) и АСМ в область орбиты очистки от объектов космического мусора (мишеней), маневрах дальнего и ближнего наведения для стыковки и захвата мишени, сведении на орбиту утилизации. ЛКИ проводят при попутном пуске ракеты-носителя (РН) для выведения полезной нагрузки КАпн на заданную орбиту. Выбор полезной нагрузки КАпн и ее орбиты, мишени и ее орбиты осуществляют из условия обеспечения возможности реализации маневров дальнего, ближнего наведения на мишень связки «РБ + АСМ» с помощью РБ после отделения КАпн, стыковки, маневров по спуску связки «РБ + АСМ + мишень» в заданный район падения на поверхности Земли с помощью РБ. Время на реализацию всех событий не должно превышать времени активного функционирования РБ. Техническим результатом изобретения является обеспечение проведения ЛКИ при попутном пуске РН и расширение области выбора мишени. 3 ил.
Способ проведения летно-конструкторских испытаний автономного стыковочного модуля для очистки орбит от крупногабаритного космического мусора, основанный на выборе мишени из имеющихся на орбитах для их увода на орбиты утилизации, выведении с помощью ракеты-носителя, разгонного блока и автономного стыковочного модуля в область орбиты, предназначенной для очистки от объектов космического мусора (мишеней), маневров дальнего и ближнего наведения для стыковки и захвата мишени, увод на орбиту утилизации, отличающийся тем, что летно-конструкторские испытания проводят при попутном пуске ракеты-носителя для выведения полезной нагрузки на заданную орбиту, при этом выбор полезной нагрузки и ее орбиты, мишени и ее орбиты осуществляют из условия обеспечения возможности реализации маневров дальнего, ближнего наведения на мишень связки «разгонный блок + автономный стыковочный модуль» с помощью разгонного блока после отделения полезной нагрузки, стыковки, маневр по спуску связки «разгонный блок + автономный стыковочный модуль + мишень» в заданный район падения на поверхности Земли с помощью разгонного блока, а время на реализации всех событий не должно превышать времени активного функционирования разгонного блока.
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 5421540 A1, 06.06.1995. | |||

