Изобретение относится к области управления движением космических аппаратов (КА) и может быть использовано в конструкции многофункциональных космических комплексов, в том числе, предназначенных для космических миссий по изучению дальнего космоса.
Известно защищенное патентом изобретение - аналог: заявка № 2010119972/11, МПК B64G 1/00, 2010 год «Способ увода космического мусора с орбит полезных нагрузок на основе использования отделившейся части ракеты-носителя, разгонного блока и устройство для его реализации» (Трушляков В.И., Куденцов В.Ю., Шатров Я.Т., Макаров Ю.Н.). Изобретение относится к области космической техники и может быть использовано для очистки околоземного космического пространства от прекративших активное существование космических аппаратов, их обломков, отделившихся частей (ОЧ) последних ступеней ракет-носителей (РН) и разгонных блоков (РБ). Способ увода космического мусора (КМ) с орбит полезных нагрузок заключается в том, что с помощью отделяемого от ОЧ РН или РБ малоразмерного космического буксира (МКБ), связанного механической связью с ОЧ РН или РБ тросом, осуществляют стыковку МКБ с КМ, после чего прилагают тормозной импульс к ОЧ ступени РН или РБ на основе использования невыработанных запасов жидкого топлива для увода связки «ОЧ ступени РН, РБ - трос - МКБ - космический мусор» на орбиту утилизации. Устройство для увода космического мусора содержит ОЧ ступени РН, РБ с ракетной двигательной установкой, тросовую систему с управляемым приводом тросового барабана, жестко связанную с ОЧ ступени РН или РБ, МКБ с аппаратурой обнаружения КМ и самонаведения, устройство стыковки. Достигается возможность увода КМ, находящегося на орбитах с близкими параметрами, к орбитам ОЧ РН, РБ. Недостатком изобретения является ограниченность его целевого применения.
Известно защищенное патентом изобретение - аналог: заявка № 2009116790/11, МПК B64G 1/00, 2009 год «Космический аппарат гибкой компоновки для дополнительного полезного груза» (Сергеев В.Е., Аверина Т.Н., Ершов СВ., Петрова В.К., Семёнкина Л.В.). Предлагаемый космический аппарат (КА) размещен на ракете-носителе в свободном объеме головного отсека между основным полезным грузом и обтекателем. Служебные системы КА выполнены в виде миниатюризированных блоков. Блоки связаны между собой гибкими электрическими и трубопроводными коммуникациями, длина которых определяется из удобства их размещения около полезного груза. Контейнер полезного груза выполнен в мягкой оболочке и снабжен разъемом стыковки и перелива полезного груза на приемный КА. КА имеет технологические элементы крепления к полезному грузу и снабжен системой перевода в транспортное положение после вывода на орбиту. Эта система включает в себя надувные шланги оболочки контейнера и электрореактивные двигатели разведения и закрутки блоков КА. Данный КА имеет также маршевый электрореактивный двигатель. Технический результат изобретения заключается в более полном и оперативном использовании энергетических и грузоприемных возможностей ракеты-носителя для увеличения грузопотока в космическое пространство, что одновременно является недостатком заявленного изобретения, поскольку оно не конкретизирует возможности управления космическим аппаратом после его отделения от ракеты-носителя и последующего развертывания.
Известно устройство - прототип, описание которого представлено в статье «Формация спутников» от 02.03.2012, размещенной в сети Интернет в журнале Космос-журнал.ру (http://www.cosmos-joumal.ru/articles/700/). Предложена формация спутников, соединенных тросами, и закрученная вокруг общего центра. В центре такой системы находится аппарат, к которому тросами прикреплены другие элементы формации. Вся система вращается как целое вокруг центрального аппарата, при этом отдельные элементы формации за счет изменения длины троса могут приближаться или удаляться от центрального. Поскольку возмущения, действующие на аппараты формации, малы, ее кинетический момент практически сохраняется. При этом с увеличением скорости закрутки (то есть, с увеличением кинетического момента системы), формация все более соответствует условиям номинальной ориентации. Фактически, система приобретает свойства гироскопа. Однако действие возмущений приводит к ее эволюции, поэтому в такой системе необходимо использовать дополнительные исполнительные элементы. Возникающее при вращении центробежное ускорение снимает проблему поддержания тросов в натянутом состоянии. При изменении длины тросов для регулирования положения вращающихся элементов формации изменяется момент инерции системы. При сохранении кинетического момента это приводит к изменению угловой скорости вращения. Для уменьшения ее колебаний тросы для каждого аппарата могут быть сделаны двусторонними, с закрепленной на втором конце компенсирующей массой. Перемещая ее одновременно с аппаратом на другом конце троса, можно до некоторой степени компенсировать изменение тензора инерции. Увеличивая расстояние до вращающихся аппаратов и масс, можно добиться уменьшения угловой скорости всей системы. Это позволяет перевести формацию в режим вращения с малой скоростью для выполнения целевых задач, например, сбора научных данных. Для упрощения переориентации системы на центральном аппарате желательно иметь средства закрепления вращающихся аппаратов (например, выступающие полозья для тросов, которые также содержат демпфирующие устройства и увеличивают устойчивость всей системы). Тогда, втянув тросы, система может быть переведена в состояние одного аппарата, стабилизированного собственным вращением. При этом переориентация системы может быть реализована при помощи простых исполнительных элементов, например двигателей ориентации. Преимуществами описанной конфигурации являются большая, чем у не вращающейся системы, устойчивость, отсутствие системы поддержания тросов в натянутом состоянии (или ее значительное упрощение), простота переориентации системы. Основным недостатком является сложность переориентации системы, связанная с необходимостью стягивания формации аппаратов в состояние одного аппарата и последующие их разведение и раскрутка. Указанный недостаток является особенно критичным в случае использования в центральном блоке ядерного реактивного двигателя, сближение с которым сопровождается резким возрастанием радиационной опасности.
Целью предполагаемого изобретения является повышение оперативности и безопасности управления движением сложной формации группы КА.
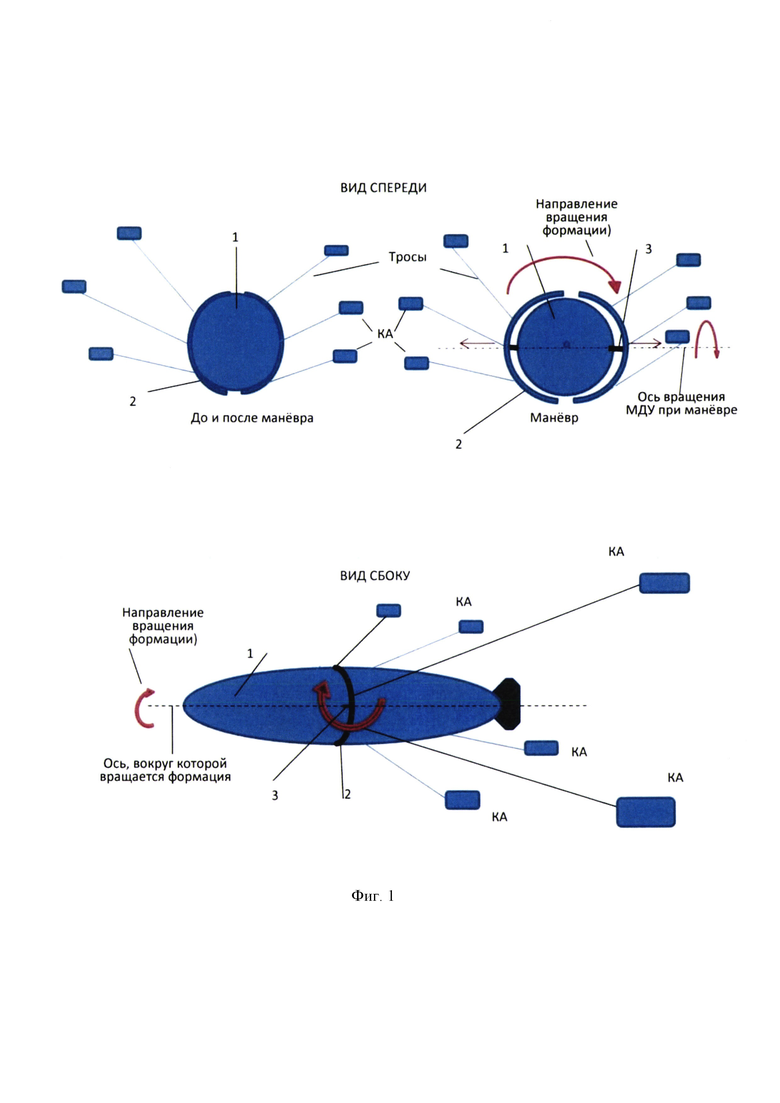
Указанная цель достигается в заявляемом способе управления движением сложной формации группы космических аппаратов, заключающейся в изменении пространственной ориентации маршевой двигательной установки (МДУ), связанной тросами с космическими аппаратами. Согласно заявляемому способу концы тросов фиксируют на внешней поверхности раздвижного полукольца, а двигательную установку закрепляют шарнирными соединениями внутри полукольца. Точки крепления маршевой двигательной установки на ее поверхности располагают диаметрально противоположно на линии, проходящий через ее центр тяжести ортогонально ее продольной оси. Размыкают подвижные части полуколец и выполняют разворот МДУ на угол 180 градусов, используя двигатели ее ориентации (Фиг. 1).
На фиг. 1 схематично показана маршевая двигательная установки - 1, подвижное полукольцо для крепления тросовой системы - 2, раздвижные элементы - 3.
Реализуемость заявляемого способа управления движением сложной формации группы космических аппаратов и его практическая значимость подтверждаются следующим образом. Оперативное и безопасное управление движением сложной формации группы КА, объединенных тросовой системой, может быть реализовано при условии сохранения текущей конфигурации группы КА. При постоянстве режимов ускорения или торможения раздвижные полукольца сомкнуты и находится в состоянии вращения вдоль продольной оси МДУ вместе с самой МДУ и совокупностью прикрепленных тросами к внешней поверхности полуколец космических аппаратов. Для сохранения текущей конфигурации группы КА в случае необходимости перехода от режима ускорения к режиму торможения или наоборот потребуется развернуть всю формацию группы КА на 180 градусов, что связано со значительными затратами времени и возможностью возникновения нештатных ситуаций, например, пересечение тросов. Согласно заявляемому изобретению, при выключенном маршевом двигателе выполняется размыкание подвижных частей раздвижных полуколец, и двигательная установка совершает разворот в плоскости, ортогональной плоскости вращения формации группы КА, на угол 180 градусов (маршевая двигательная установка может иметь только 2 положения: исходное - 0° (для ускорения формации) и развернутое - 180° (для торможения формации). По завершении разворота подвижные части раздвижных полуколец замыкаются. Для уменьшения влияния перемещений двигательной установки на состояние движения формации группы КА, точки крепления двигательной установки внутри раздвижных полуколец располагают диаметрально противоположно на поверхности двигательной установки вдоль линии, проходящий через ее центр тяжести ортогонально продольной оси. Компенсация моментов, возникающих в процессе изменения скорости движения формации после разворота МДУ, достигается регулированием длины тросов и изменением угловой скорости вращения формации вокруг ее продольной оси.
Вращательное движение двигательной установки не вносит существенного возмущения во вращательное движение системы в целом, поскольку длина тросов, соединяющих раздвижные полукольца с транспортируемыми КА, намного превышает характерные размеры раздвижных полуколец. Указанное обстоятельство обеспечивает также условия радиационной безопасности в случае использования в центральном блоке ядерного реактивного двигателя.
Таким образом способ управления движением закрученной вокруг общего центра формации спутников, соединенных тросами не вызывают сомнений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| СПОСОБ ПРОВЕДЕНИЯ ЛЁТНО-КОНСТРУКТОРСКИХ ИСПЫТАНИЙ АВТОНОМНОГО СТЫКОВОЧНОГО МОДУЛЯ ДЛЯ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2016 |
|
RU2643020C1 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2506206C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 2016 |
|
RU2643744C2 |
| РАКЕТНЫЙ РАЗГОННЫЙ БЛОК | 2000 |
|
RU2153447C1 |
| СПОСОБ УВОДА ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ С ОРБИТЫ ПОЛЕЗНОЙ НАГРУЗКИ И ДВИГАТЕЛЬНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2406856C2 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
Изобретение относится к управлению движением вращающейся связки космических аппаратов (КА). Способ включает переориентацию в пространстве маршевой двигательной установки (МДУ), расположенной в центре вращения связки и связанной тросами с КА. Концы тросов закрепляют на внешней поверхности раздвижных полуколец, охватывающих МДУ и шарнирно связанных с ней. При переориентации раздвигают подвижные части полуколец, выполняют разворот МДУ (напр., с помощью двигателей, установленных в шарнирах) на угол 180 градусов и вновь сдвигают полукольца. Тем самым направление тяги МДУ для последующих манёвров меняется на противоположное. Техническим результатом является повышение оперативности и безопасности управления движением сложной формации группы КА. 1 ил.
Способ управления движением сложной формации группы космических аппаратов, согласно которому изменяют пространственную ориентацию маршевой двигательной установки, связанной тросами с космическими аппаратами, отличающийся тем, что концы тросов закрепляют на внешней поверхности раздвижных полуколец, маршевую двигательную установку закрепляют шарнирными соединениями внутри полуколец, раздвигают подвижные части полуколец, выполняют разворот маршевой двигательной установки на угол 180 градусов.
| Формация на тросе | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Космос-Журнал | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Машина для отмеривания теста | 1925 |
|
SU700A1 |
| ИТОГИ НАУКИ И ТЕХНИКИ | |||
| Ракетостроение и космическая техника | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| ВИНИТИ | |||
| М | |||
| Циркуль-угломер | 1920 |
|
SU1991A1 |
| СПОСОБ ЭЛЕКТРОДИНАМИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С МАГНИТОПЛАЗМЕННОЙ ОКОЛОПЛАНЕТНОЙ СРЕДОЙ И ЭЛЕКТРОДИНАМИЧЕСКАЯ ТРОСОВАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2092401C1 |
| RU 2058916 C1, 27.04.1996 | |||
| US 6260807 B1, 17.07.2001. | |||

