Изобретение относится к ракетно-космической технике и может быть использовано для стыковки с некооперируемыми объектами космического мусора. Известен аналог предлагаемого технического решения, например, патент RU №2430861 B64G 1/64 от 04.03. 2010 «Способ стыковки космических аппаратов и устройство для его реализации». Наиболее близким техническим решением является евразийский патент № 038352 «Способ увода объектов крупногабаритного космического мусора и устройство для его реализации», основанный на использовании космического буксира (КБ), отделяющегося от него на тросе транспортно-стыковочного модуля (ТСМ) и стыковки с космическим мусором (КМ), в котором за счет различия орбитальных скоростей (КБ с ТСМ) и КМ, используя ТСМ для доставки троса А от КБ к КМ, на этапе ближнего наведения формируют вращающуюся тросовую систему (ТС1), включающую в свой состав КБ - трос А - ТСМ, c жесткой механической связью между ТСМ и КМ (например, штанга-конус или манипулятор) или вращающуюся тросовую систему (ТС2), включающую в свой состав КБ - трос А - ТСМ, с тросовой связью (трос Б) между ТСМ и КМ (например, сеть или гарпун на тросе Б), после формирования вращающейся ТС1 (ТС2), определяют ее угловое положение на орбите по отношению к вектору орбитальной скорости ее центра масс и для увеличения высоты орбиты центра масс прилагают импульс двигательной установки (ДУ) КБ, направленной вдоль линии троса А в сторону центра масс ТС1 (ТС2), на интервале углового положения ТС1 (ТС2), соответствующего положительной величине проекции импульса двигательной установки (ДУ) КБ на вектор орбитальной скорости центра масс ТС1 (ТС2), а для уменьшения высоты орбиты центра масс импульс ДУ КБ прилагают на интервале углового положения ТС1 (ТС2), соответствующего отрицательной величине проекции импульса ДУ КБ на вектор орбитальной скорости центра масс ТС1 (ТС2), управление натяжением троса А, соединяющего КБ с ТСМ, от момента формирования жесткой связи между ТСМ и КМ, до момента отделения КМ от ТСМ, осуществляют изменением длины троса А для обеспечения гарантированного натяжения троса А с учетом действия на КБ силы тяги, силы натяжения троса А от вращения ТС1 вокруг ее центра масс, а также для демпфирования возможных продольных колебаний троса А, при этом сила натяжения троса А не должна превышать предельного значения, определяемого свойствами материала троса А, и прочностью элементов конструкций, обеспечивающих крепление троса А к ТСМ и КБ и соединение ТСМ с КМ, управление натяжением тросов А, Б, соединяющего КБ с ТСМ и ТСМ с КМ, соответственно, осуществляют путем изменения длин тросов А, Б для обеспечения гарантированного их натяжения с учетом действия на КБ силы тяги ДУ КБ, натяжения тросов А, Б от вращения ТС2 вокруг центра масс, демпфирования возможных продольных колебаний тросов, колебаний ТСМ относительно линии, соединяющей центры масс КМ и КБ, и отсутствия в ТС2 резонансных явлений, при этом сила натяжения тросов А, Б не должна превышать предельного значения, определяемого свойствами материалов тросов А,Б, и прочностью элементов конструкций, обеспечивающих крепление тросов А,Б к ТСМ и КБ, КМ, соответственно, и соединение ТСМ с КМ, при достижении центром масс ТС1 заданной области околоземного пространства и заданной орбитальной скорости движения КМ осуществляют отделение КМ путем разрыва жесткой механической связи между ТСМ и КМ, при достижении центром масс ТС2 заданной области околоземного пространства и заданной орбитальной скорости движения КМ осуществляют отделение КМ путем разрыва жесткой механической связи между ТСМ и тросом Б, после отделения КМ осуществляют торможение вращения связки (КБ - трос А - ТСМ), стягивание в единую жесткую связку и маневра связки (КБ - ТСМ) к следующему объекту КМ.
В способе по патенту №2430861 тросовая система 1, включающая в свой состав КБ, управляемый тросовый барабан А, трос А, отделяемый на тросе А ТСМ с системой стыковки с КМ, КБ оснащен ДУ с возможностью отработки продольных импульсов по «толкающей» схеме, ТСМ в ТС1 оснащен декартовой ДУ и системой жесткой стыковки и захвата типа «штырь-конус» или «робот-рука».
Тросовая система 2, включающая в свой состав КБ, управляемый тросовый барабан А, трос А, ТСМ с системой стыковки с КМ, причем КБ оснащен ДУ с возможностью отработки продольных импульсов по «толкающей» схеме, в состав ТСМ в ТС2 входит управляемый тросовый барабан Б, жестко связанный с ТСМ, трос Б, система крепления троса Б с ТСМ на основе разрывных болтов, электрически связанную с ТСМ, отделяемая от ТСМ на тросе Б систему захвата типа гарпун, сеть.
К основным недостаткам этого способа стыковки относятся:
- не учитываются возможные ошибки выведения КБ+ТСМ в точку стыковки и ошибки прогноза параметров движения КМ, как ее центра масс, так и углового положения при движении по орбите;
- наличие рывка троса в момент натяжения троса при стыковке ТСМ с КМ из-за наличия относительной скорости между КБ и КМ в момент стыковки ТСМ с КМ;
- отсутствуют оценки необходимой прочности троса для исключения его разрыва, как функции ошибок выведения КБ+ТСМ и прогноза движения КМ.
Целью предлагаемого технического решения является устранение указанных недостатков, что достигается за счет включение известный способ,
основанный на использовании КБ, оснащенного двигательной установкой для реализации продольных импульсов по «толкающей» схеме, отделяющегося от него на тросе ТСМ, оснащенном декартовой двигательной установкой, и стыковки с КМ с использованием системы захвата («штырь-конус», «робот-рука», гарпун, сеть) за счет различия орбитальных скоростей КБ+ТСМ и КМ, использовании ТСМ для доставки троса от КБ к КМ формировании вращающейся ТС, приложении импульса ДУ КБ для изменения параметров орбиты ТС, управлении натяжением троса, демпфирования возможных продольных колебаний тросов, и, при достижении центром масс ТС заданной области околоземного пространства и заданной орбитальной скорости движения КМ, осуществляют отделение КМ путем разрыва жесткой механической связи между ТСМ и КМ,
добавляют следующие действия
1) параметры орбиты КМ и его угловое положение по отношению к орбитальной системе координат на момент захвата КМ и начала натяжения троса;
2) орбиту КБ+ТСМ определяют по задаваемым параметрами  ,
,  ,
,  , определяющим расчетное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной , где - угол между местной вертикалью орбиты КМ и тросом, соединяющем КМ и КБ; - скорость КБ относительно КМ, перпендикулярная тросу (фиг. 1);
, определяющим расчетное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной , где - угол между местной вертикалью орбиты КМ и тросом, соединяющем КМ и КБ; - скорость КБ относительно КМ, перпендикулярная тросу (фиг. 1);
3) угол при формировании орбиты перехвата определяют из условия расположения КБ по отношению к корпусу КМ со стороны области захвата ТСМ в момент начала натяжения троса;
4) диаметр троса  определяют из условия прочности троса, используя параметры относительного движения, соответствующие началу натяжения троса, c учетом погрешности построения орбиты КБ и определения орбиты КМ:
определяют из условия прочности троса, используя параметры относительного движения, соответствующие началу натяжения троса, c учетом погрешности построения орбиты КБ и определения орбиты КМ:
где:  - модуль упругости троса;
- модуль упругости троса;  - максимальное допустимое напряжение в тросе;
- максимальное допустимое напряжение в тросе;  - средняя деформация троса, определяемая выражением
- средняя деформация троса, определяемая выражением
 - начальная скорость изменения удельной деформации троса;
- начальная скорость изменения удельной деформации троса;  - начальная угловая скорость вращения тросовой системы;
- начальная угловая скорость вращения тросовой системы;
 - частота собственных продольных колебаний тросовой системы:
- частота собственных продольных колебаний тросовой системы:
где:  - приведенная масса КБ и связки ТСМ + КМ;
- приведенная масса КБ и связки ТСМ + КМ;
 - масса ТСМ;
- масса ТСМ;  - масса КБ;
- масса КБ;  - масса КМ;
- масса КМ;
 - площадь поперечного сечения троса;
- площадь поперечного сечения троса;
 - проекция скорости КБ относительно связки КМ+ТСМ в момент начала натяжения троса на направление троса:
- проекция скорости КБ относительно связки КМ+ТСМ в момент начала натяжения троса на направление троса:

где:  ,
,  , е радиус-векторы КБ и КМ в геоцентрической инерциальной системе координат с учетом ошибок выведения КБ+ТСМ и прогноза орбиты КМ на момент захвата КМ бортовой аппаратурой ТСМ; - проекция скорости КБ относительно связки КМ+ТСМ в момент начала натяжения троса на направление перпендикулярное тросу:
, е радиус-векторы КБ и КМ в геоцентрической инерциальной системе координат с учетом ошибок выведения КБ+ТСМ и прогноза орбиты КМ на момент захвата КМ бортовой аппаратурой ТСМ; - проекция скорости КБ относительно связки КМ+ТСМ в момент начала натяжения троса на направление перпендикулярное тросу:

где:  ,
,  - скорости центров масс КБ и связки КМ с ТСМ в момент начала натяжения троса с учетом возмущений, т. е. ошибок выведения и прогноза;
- скорости центров масс КБ и связки КМ с ТСМ в момент начала натяжения троса с учетом возмущений, т. е. ошибок выведения и прогноза;
5) положение КМ на орбите в момент захвата, параметры орбиты перехвата с учетом ошибок реализации орбиты перехвата и определения параметров орбиты КМ выбирают из условия минимизации составляющей скорости  на момент натяжения троса между КМ и КБ
на момент натяжения троса между КМ и КБ

где:  - угол истинной аномалии КМ, определяющий его положение на орбите в момент захвата,
- угол истинной аномалии КМ, определяющий его положение на орбите в момент захвата,  - векторы ошибок определения орбиты КМ и реализации орбиты перехвата КБ.
- векторы ошибок определения орбиты КМ и реализации орбиты перехвата КБ.
Пояснения к действиям способа
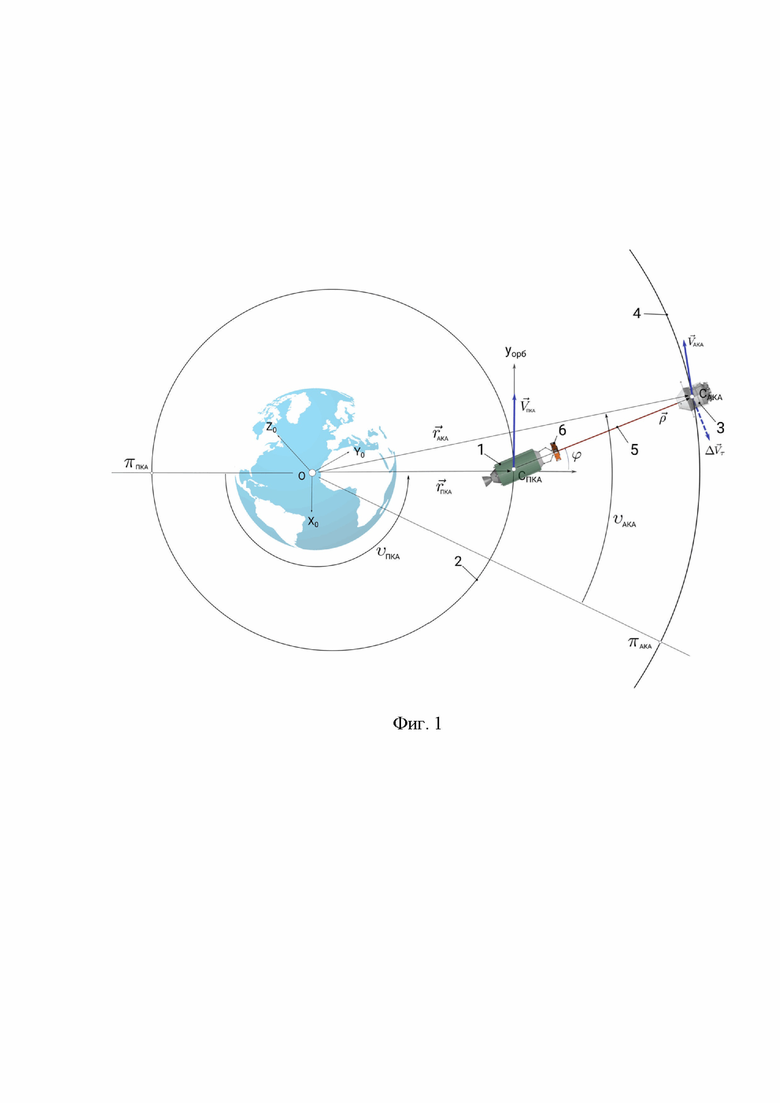
На фиг. 1 показаны:
а) положение КМ 1 на орбите 2, определяемое углом истинной аномалии . КБ 3 движется по орбите перехвата 4. Положение КМ и КБ показано в момент натяжения троса 5, когда угол между местной вертикалью орбиты КМ в положении и тросом равен , при этом скорость КБ относительно КМ равна . Тросовая связь сформирована ТСМ 6, отделившимся от КБ и выполнившим стыковку с КМ 4;
б) геоцентрическая инерциальная система координат  , относительно начала которой определяются расчетные положения и скорости КБ и КМ:
, относительно начала которой определяются расчетные положения и скорости КБ и КМ:  ,
,  ,
,  ,
,  , а также фактические положения и скорости КБ и КМ: , , , ;
, а также фактические положения и скорости КБ и КМ: , , , ;
в) орбитальная подвижная система координат, связанная с центром масс связки КМ с ТСМ  . Ось
. Ось  направлена по радиус-вектору связки КМ с ТСМ , ось
направлена по радиус-вектору связки КМ с ТСМ , ось  лежит в плоскости орбиты связки КМ с ТСМ и направлена в сторону движения связки;
лежит в плоскости орбиты связки КМ с ТСМ и направлена в сторону движения связки;
в) точка перигея орбиты связки КМ с ТСМ -  и точка перигея орбиты КБ -
и точка перигея орбиты КБ -  . От линии
. От линии  отсчитывается угол истинной аномалии КМ: . От линии
отсчитывается угол истинной аномалии КМ: . От линии  отсчитывается угол истинной аномалии КБ:
отсчитывается угол истинной аномалии КБ:  .
.
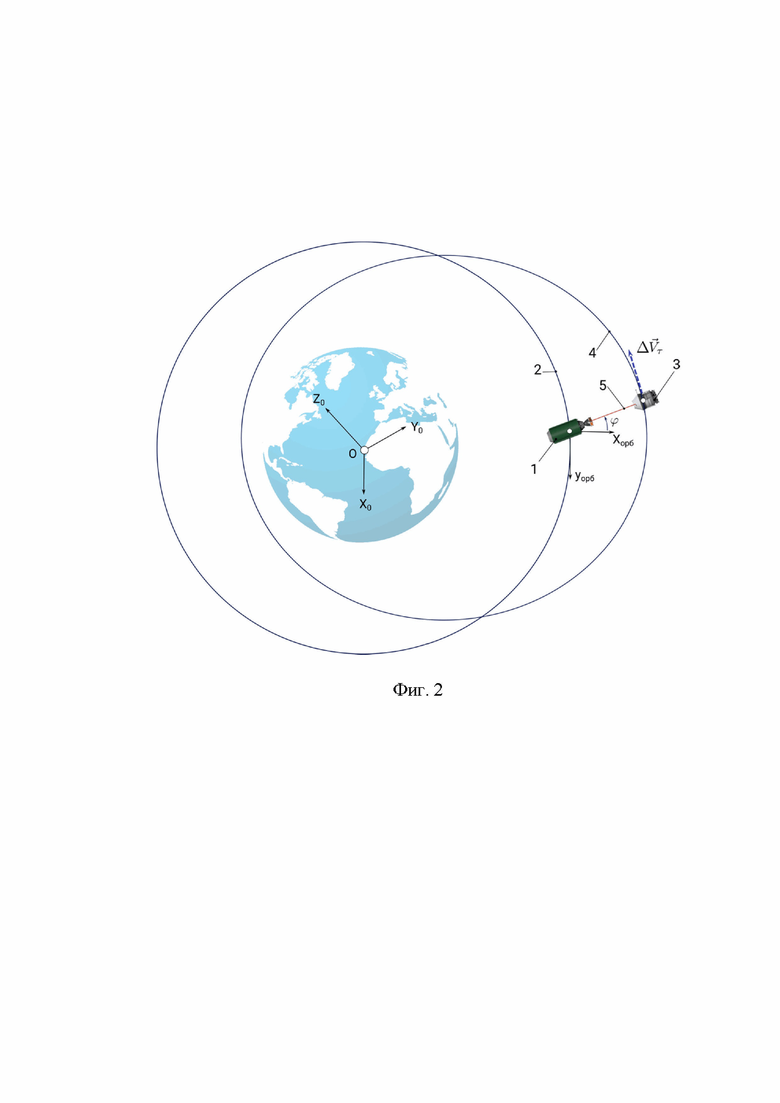
На фиг. 2 показано относительное положение КБ 3 и связки КМ с ТСМ 1 в момент натяжения троса 5 при котором КБ 3 находится выше КМ 1 по отношению к Земле. Захват КМ, представляющего собой орбитальную ступень, производится со стороны сопла двигателя. В момент захвата сопло ступени направлено в положительном направлении оси , что обуславливает выбор орбиты КБ - выбор угла .
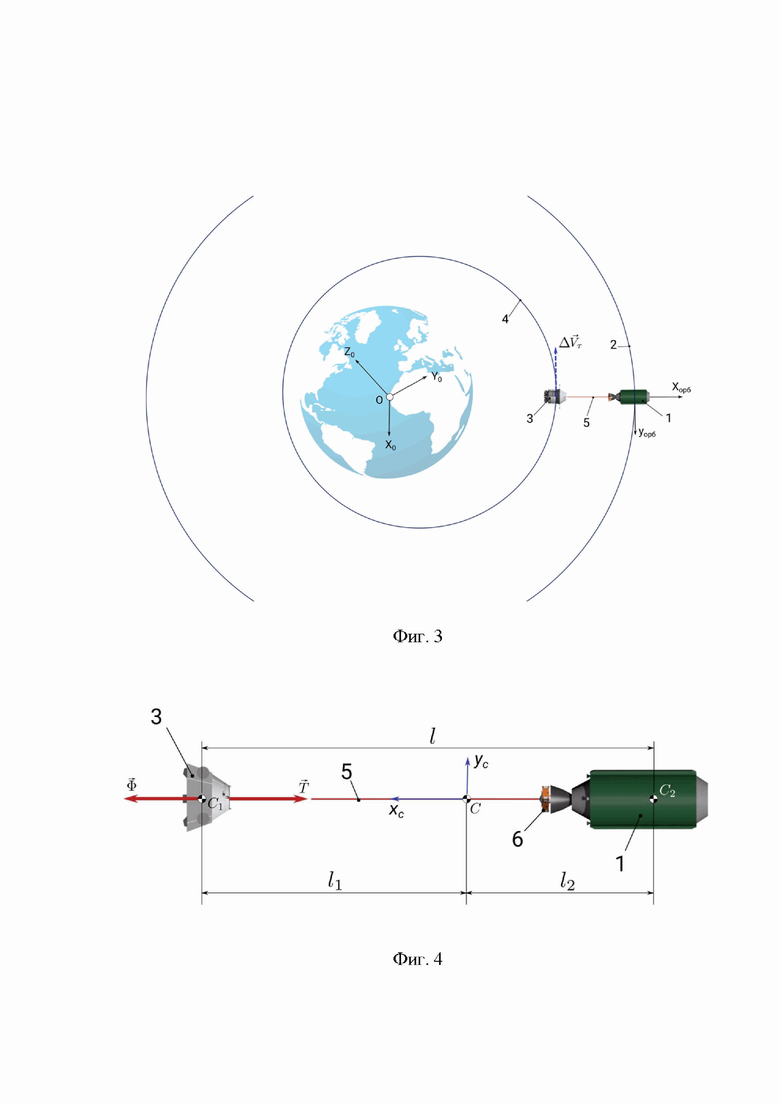
На фиг. 3 показано относительное положение КБ 3 и связки КМ с ТСМ 1 в момент натяжения троса 5 при котором КБ 3 находится ниже КМ 1 по отношению к Земле. Сопло КМ типа орбитальная ступень обращено в сторону Земли.
На фиг. 2 и фиг. 3 приведены различные случаи относительного положения КБ и связки КМ и ТСМ в момент натяжения троса, обусловленные угловым положением КМ и расположением места захвата на поверхности КМ
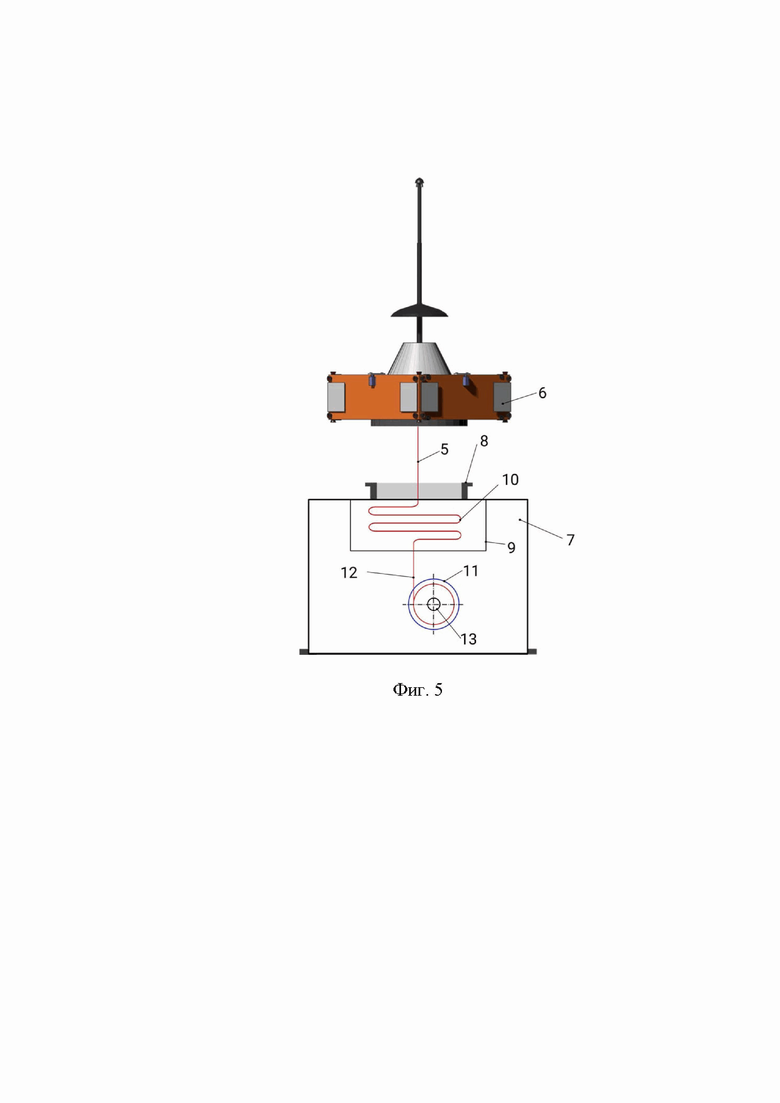
На фиг. 4 показаны:
а) тросовая система, состоящая из связки КМ 1 с ТСМ 6, соединенной тросом 5 с КБ 3, вращающаяся вокруг центра масс С;
б) сила натяжения троса T, действующая на КБ и сила инерции Ф, определяемая движением КБ во вращающейся системе координат  .
.
На фиг. 5 показан адаптер 7 для установки ТСМ 6 на КБ, c устройством отделения ТСМ 8 контейнером 9 для укладки троса части троса 5, развертываемого после отделения ТСМ 6 и устройство натяжения и демпфирования, состоящее из барабана 11 и устройства натяжения троса 13, на который наматывается часть троса 12 предназначенные для исключения ослабления натяжения троса и демпфирования его продольных колебаний при захвате КМ. Большая часть троса (например, 95%) 5, находится в контейнере 9 и вытягивается из контейнера после отделения ТСМ его ходом. Контейнер 9 обеспечивает быстрое развертывание троса с минимальными возмущающими воздействиями на ТСМ и КБ. При приближении ТСМ к КМ выполняется маневр торможения, что может привести к ослаблению троса. Устройство натяжения троса 13, вращая барабан 11, управляет длиной троса обеспечивая равенство развернутой длины троса расстоянию от КБ до ТСМ. После захвата КМ привод устройство натяжения 13 используется для демпфирования рывка и продольных колебаний троса путем изменения длины троса, вызванных ненулевой проекцией скорости КБ по отношению к связке КМ+ТСМ на направление троса.
Обоснование действий способа
1) параметры орбиты КМ и его угловое положение по отношению к орбитальной системе координат на момент захвата КМ и начала натяжения троса;
Перед запуском КБ 3 с ТСМ 6 определяют параметры орбиты КМ 1 и выполняют прогноз его положения () и скорости ( ) в момент захвата. Положение и скорость КМ определяют по отношению к геоцентрической инерциальной системе координат . На фиг. 1 показано расчетное положение КМ, определяемое параметрами его орбиты и положением на орбите (углом истинной аномалии ). Определяется угловое движение КМ 1 по отношению к орбитальной подвижной системе координат
) в момент захвата. Положение и скорость КМ определяют по отношению к геоцентрической инерциальной системе координат . На фиг. 1 показано расчетное положение КМ, определяемое параметрами его орбиты и положением на орбите (углом истинной аномалии ). Определяется угловое движение КМ 1 по отношению к орбитальной подвижной системе координат  и выполняют прогноз углового положения (ориентации) КМ 1 по отношению к осям орбитальной подвижной системе координат. Определение углового положения КМ на момент захвата необходимо для определения направления подхода ТСМ 6 для захвата КМ 1.
и выполняют прогноз углового положения (ориентации) КМ 1 по отношению к осям орбитальной подвижной системе координат. Определение углового положения КМ на момент захвата необходимо для определения направления подхода ТСМ 6 для захвата КМ 1.
2) орбиту КБ+ТСМ определяют по задаваемым параметрами
,
,
 , определяющим расчетное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной
, где
- угол между местной вертикалью орбиты КМ и тросом, соединяющем КМ и КБ;
- скорость КБ относительно КМ, перпендикулярная тросу (фиг. 1);
, определяющим расчетное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной
, где
- угол между местной вертикалью орбиты КМ и тросом, соединяющем КМ и КБ;
- скорость КБ относительно КМ, перпендикулярная тросу (фиг. 1);
Зная, положение и скорость КМ в геоцентрической инерциальной системе координат определяют положение и скорость КБ по отношению к той же системе координат, задаваясь параметрами, определяющими положение и скорость КБ по отношению к КМ в плоскости орбиты КМ. Положение КБ относительно КМ может в плоскости орбиты КМ быть задано параметрами , , . Угол - определяет направление на КБ относительно местной вертикали орбиты КМ, - определяет расстояние от КБ до КМ, равное длине троса, - скорость КБ относительно КМ, перпендикулярная тросу, которая определяет начальную угловую скорость тросовой системы:
обеспечивая минимальное натяжение троса после формирования вращающейся тросовой системы, определяемое условием:
где  - сила тяги КБ (см. уравнение (28)).
- сила тяги КБ (см. уравнение (28)).
В орбитальной подвижной системе координат, связанной с КМ+ТСМ, положение КБ в плоскости орбиты КМ может быть определено в полярных координатах. Положение КБ относительно центра масс КМ+ТСМ (точка  ) в определяется координатным столбцом (Фиг. 1):
) в определяется координатным столбцом (Фиг. 1):
Радиус-вектор КМ+ТСМ в  совпадает с направлением оси (по определению этой системы координат), поэтому координатный столбец радиус-вектор КБ относительной центра Земли в проекциях на оси имеет вид:
совпадает с направлением оси (по определению этой системы координат), поэтому координатный столбец радиус-вектор КБ относительной центра Земли в проекциях на оси имеет вид:
где:  - расстояние от центра Земли до центра масс связки КМ и ТСМ, как функция угла истинной аномалии связки КМ+ТСМ:
- расстояние от центра Земли до центра масс связки КМ и ТСМ, как функция угла истинной аномалии связки КМ+ТСМ:
где:  ,
,  , - фокальный параметр, эксцентриситет орбиты и угол истинной аномалии связки в момент формирования тросовой системы.
, - фокальный параметр, эксцентриситет орбиты и угол истинной аномалии связки в момент формирования тросовой системы.
Координатный столбец скорости КБ (относительно центра Земли) в проекциях на оси орбитальной подвижной системы координат может быть выражен как сумма скорости связки КМ+ТСМ:
и скорости КБ относительно связки КМ+ТСМ:
Зная и , можно определить параметры номинальной орбиты КБ (орбиты перехвата) в момент формирования тросовой системы (в момент начала натяжения троса), используя известные формулы орбитальной механики (1 А. А. Суханов, Астродинамика. Институт космических исследований РАН. Серия «Механика, управление, информатика», М.: 2010, стр. 29.).
Для примера рассмотрим захват КМ, движущегося по орбите с высотой перигея 800 км и высотой апогея 850 км. В момент перехвата угол истиной аномалии КМ равен = 0, аргумент перигея КМ также равен нулю  . В табл. 1 приведены параметры орбиты перехвата КБ+ТСМ для захвата КМ для семи значений угла при величине относительной скорости = 100 м/с и начальной длине троса = 3 км: высота перигея, высота апогея, эксцентриситет, аргумент перигея, угол истинной аномалии. В последнем столбце Табл. 1 приведены оценки характеристической скорости (
. В табл. 1 приведены параметры орбиты перехвата КБ+ТСМ для захвата КМ для семи значений угла при величине относительной скорости = 100 м/с и начальной длине троса = 3 км: высота перигея, высота апогея, эксцентриситет, аргумент перигея, угол истинной аномалии. В последнем столбце Табл. 1 приведены оценки характеристической скорости ( ) для перехода на орбиту перехвата с условной круговой орбиты выведения с высотой 200 км. Значения позволяют сравнить орбиты перехвата с точки зрения затрат энергии (топлива).
) для перехода на орбиту перехвата с условной круговой орбиты выведения с высотой 200 км. Значения позволяют сравнить орбиты перехвата с точки зрения затрат энергии (топлива).
и величине относительной скорости  = 100 м/с и начальной длине троса 3 км
= 100 м/с и начальной длине троса 3 км градус
градус

 , градус, градус, м/с
, градус, градус, м/с
Как следует из результатов, представленных в табл. 1, при нулевом угле и при угле равным 180 градусам орбиты перехвата имеют наименьшую высоту перигея и апогея и наименьшее значение , т. е. эти орбиты наиболее выгодны с точки зрения затрат топлива на выведение КБ на орбиту перехвата. Однако, ориентация КМ в орбитальной системе координат в момент захвата, которая будет определять расположение области захвата (стыковки) на поверхности КМ по отношению к КБ в момент захвата, может ограничивать выбор угла .
3) параметр
определяют из условия расположения КБ по отношению к корпусу КМ со стороны точки захвата ТСМ;
Захват КМ выполняется ТСМ. Для захвата КМ может быть использовано устройство типа штанга-конус, манипулятора, сети или гарпуна на тросовой связи. При использовании устройства захвата типа штанга-конус захват КМ выполняется со стороны сопла двигателя КМ. При использовании манипулятора захват может быть выполнен как со стороны сопла двигателя КМ, так и со стороны стыковочного шпангоута полезной нагрузки, если КМ представляет собой отработавшую орбитальную ступень.
В момент захвата и начала натяжения троса КБ должен находиться по отношению к КМ со стороны области захвата ТСМ для исключения зацепления троса за элементы конструкции ТСМ или КМ. На Фиг. 2 показан КМ 1 типа орбитальная ступень, который в момент захвата соплом двигателя обращен в сторону от Земли ( ). Для захвата КМ 1 ТСМ 6, оснащенный устройством типа штанга-конус, должен подходить к КМ со стороны положительного направления оси орбитальной системы координат , таким образом при выборе орбиты перехвата должно выполнятся необходимое условие
). Для захвата КМ 1 ТСМ 6, оснащенный устройством типа штанга-конус, должен подходить к КМ со стороны положительного направления оси орбитальной системы координат , таким образом при выборе орбиты перехвата должно выполнятся необходимое условие  .
.
На фиг. 3 показано положение КМ 1 в момент захвата, при котором сопло двигателя обращено в сторону от Земли. В этом случае захват КМ должен выполняться в верхней полусферы по отношению к нему: орбита перехвата должна выбираться из множества орбит перехвата с условием . На фиг. 4 показано положение КМ 1 в момент захвата, при котором сопло двигателя обращено в сторону Земли. В этом случае захват КМ должен выполняться в нижней полусфере по отношению к КМ: орбита перехвата должна выбираться из множества орбит перехвата с условием  .
.
При использовании для захвата КМ устройства типа сеть, робот-рука, гарпун положение КБ по отношению к КМ и ориентация КМ в орбитальной системе не ограничиваются: захват может быть выполнен при любом взаимном положении КБ и КМ и любой ориентации КМ в орбитальной системе координат.
Таким образом, выбор угла определяется положением КМ на орбите в момент захвата, его ориентацией в орбитальной системе координат КМ и выбранным способом захвата КМ. При использовании устройства захвата типа сеть робот-рука, гарпун выбор угла может определяться из условия минимизации затрат топлива на выведение КБ на орбиту перехвата (см. табл. 1).
4) диаметр троса
определяют из условия прочности троса используя параметры относительного движения, соответствующие началу натяжения троса c учетом погрешности построения орбиты КБ и определения орбиты КМ.
Уравнение продольных колебаний троса, вращающейся тросовой системы, имеет вид (1 V.I. Trushlyakov, V. V. Yudintsev. “Rotary Space Tether System for Active Debris Removal,” Journal of Guidance, Control, and Dynamics. Vol. 43, No. 2, February 2020. doi: https://doi.org/10.2514/1.G004615) (Фиг. 4):

где: - масса КБ,  - расстояние от центра масс системы до точки закрепления троса на КБ, - сила тяги КБ.
- расстояние от центра масс системы до точки закрепления троса на КБ, - сила тяги КБ.
Переносная сила инерции  , вызванная вращением тросовой системы определяется выражением:
, вызванная вращением тросовой системы определяется выражением:
где  - угловая скорость вращения тросовой системы. Сила натяжения троса определяется выражением:
- угловая скорость вращения тросовой системы. Сила натяжения троса определяется выражением:
где: - модуль упругости троса,  - площадь поперечного сечения троса, - длина нерастянутого троса,
- площадь поперечного сечения троса, - длина нерастянутого троса,
 - длина растянутого троса,
- длина растянутого троса,  - деформация троса.
- деформация троса.
Из определения центра масс следует, что
где: - масса КМ, - масса ТСМ.
Уравнение продольных колебаний троса для переменной нерастянутой длины троса имеет вид

Введя обозначение
получим

При  уравнение (20) принимает вид
уравнение (20) принимает вид
Переходя к новой безразмерной переменной - удельной деформации троса по отношению к начальной (недеформированной) длине:
получим уравнение:

Далее предполагается, что моменты внешних сил, например, гравитационный момент оказывают пренебрежимо малое движение вращающейся тросовой системы, при этом момент от силы тяги КБ относительно центра масс тросовой системы равен нулю, т.к. линия действия силы тяги буксира совпадает с линией троса. В этом случае изменение угловой скорости будет определяться из условия сохранения момента количества движения тросовой системы:
где  - начальная угловая скорость тросовой системы, определяемая выражением
- начальная угловая скорость тросовой системы, определяемая выражением
C учетом (24) уравнение (23) принимает вид:
Для малых  правая часть уравнения может быть линеаризована:
правая часть уравнения может быть линеаризована:
С учётом (27) уравнение (23) принимает вид:

В момент формирования тросовой системы сила тяги КБ равна нулю. Для этого случая уравнение движения имеет вид

Учитывая неизбежные ошибки при переводе КБ на орбиту перехвата фактические положения и скорости КБ и КМ в момент натяжения троса будет определяться векторами , , , . Векторы , , , будут определять относительное движение КБ и КМ в момент начала натяжения троса, а именно начальную угловую скорость ТС, определяемую выражением (23).
Погрешности реализации орбиты перехвата приводят к тому, что в момент натяжения троса скорость КБ относительно КМ может привести к наличию проекции и на направление троса  , что приведет к его дополнительной деформации, что необходимо учитывать при выборе его толщины. Величина определяет начальную скорость удельной деформации троса:
, что приведет к его дополнительной деформации, что необходимо учитывать при выборе его толщины. Величина определяет начальную скорость удельной деформации троса:
Максимальная деформация троса определяется из уравнения его продольных колебаний (29) с начальными условиями:

Интегрирование уравнения (29) позволяет оценить максимальную деформацию троса при наличии  :
:
где  - стационарная (равновесная деформация троса при вращении тросовой системы), которая в начальный момент времени двигалась с угловой скоростью :
- стационарная (равновесная деформация троса при вращении тросовой системы), которая в начальный момент времени двигалась с угловой скоростью :
Прочность троса определяется допускаемым напряжением  /, где
/, где  - предельное напряжение материала троса, k>1 - коэффициент запаса. Деформация троса, соответствующая возникновению в тросе максимальных напряжений, определяется выражением:
- предельное напряжение материала троса, k>1 - коэффициент запаса. Деформация троса, соответствующая возникновению в тросе максимальных напряжений, определяется выражением:
Для сохранения целостности троса должно выполняться условие:
В табл. 2 приведены максимальные удельные деформации троса ( ) для различных отклонений аргумента перигея (
) для различных отклонений аргумента перигея ( ), эксцентриситета (
), эксцентриситета ( ), большой полуоси орбиты (
), большой полуоси орбиты ( ) орбиты КБ от соответствующих расчетных значений. В табл. 2 также приведены значения аргумента перигея (
) орбиты КБ от соответствующих расчетных значений. В табл. 2 также приведены значения аргумента перигея ( ), истинной аномалии КБ (
), истинной аномалии КБ ( ) и КМ (
) и КМ ( ) в момент захвата при которых расстояние между КБ и КМ равны начальной длине троса . В последней строке табл. 2 - предельная удельная деформация троса [
) в момент захвата при которых расстояние между КБ и КМ равны начальной длине троса . В последней строке табл. 2 - предельная удельная деформация троса [ ] для материала Spectra-1000 (
] для материала Spectra-1000 ( ,
,  ) и коэффициента запаса 1,3.
) и коэффициента запаса 1,3.
Табл. 2 иллюстрирует значительное влияние на максимальную деформацию троса ошибок параметров орбиты КБ. В частности, при ошибке по аргументы перигея на 0,5 градуса (вариант 3) и ошибке реализации большой полуоси орбиты КБ 50 метров максимальная деформация троса увеличивается почти в три раза в сравнении с вариантом 1 (расчетная траектория) за счет увеличения проекции скорости КБ по отношению к КМ на направление троса () в момент захвата до 22 м/с. При большей ошибке большой полуоси орбиты (вариант 4) проекция относительной скорости на направление троса увеличивается до 32 м/с, что приводит к необходимости увеличения диаметра троса до 4 мм. Это увеличения приводит к росту массы троса длиной 3 км на 16 кг (с 21 до 37 кг): занимаемый тросом объем увеличивается с 21 до 38 литров. При ошибке реализации большой полуоси орбиты КБ 200 м (вариант 5), диаметр троса из условия прочности должен быть увеличен до 5 мм, а его масса в этом случае увеличится до 57 кг: объем, занимаемый таким тросом равен 59 литрам.
 град
град
 м, град, град, град
м, град, град, град м/с
м/с м/с, %
м/с, %
5) положение КМ на орбите в момент захвата, параметры орбиты перехвата с учетом ошибок реализации орбиты перехвата и определения параметров орбиты КМ выбирают из условия минимизации составляющей скорости
 на момент натяжения троса между КМ и КБ
на момент натяжения троса между КМ и КБ
Различные способы выведения КБ на орбиту перехвата и средства выведения (разгонные блоки, орбитальные ступени РН) имеют различные погрешности реализации требуемых элементов орбиты перехвата. Эти погрешности оказывают влияние на относительно положение КБ и КМ в момент натяжения троса и их относительные скорости. По известным априорным погрешностям реализации орбитальных параметров КБ и погрешностям оценки орбиты КМ могут быть определены такие программные значения , ,  и положение КМ на орбите , при которых максимальное значение минимально:
и положение КМ на орбите , при которых максимальное значение минимально:

где - вектор ошибок орбитальных параметров КМ и КБ, характеризующий погрешность определения орбиты КМ и погрешность реализации орбиты КБ.
Предлагаемое устройство для реализации приведено на фиг. 5 и состоит из следующих элементов:
а) адаптер 7 с устройством отделения 8 ТСМ 6, размещенный на КБ, для размещения ТСМ и отделения ТСМ,
б) контейнер 9 для укладки части троса 10 по типу парашютных строп, обеспечивающих свободное развертывание троса после отделения ТСМ;
в) устройство натяжения и демпфирования, состоящее из вращающегося управляемого барабана 11 и устройства натяжения троса 13, которое создает момент М, приложенный к оси вращения барабана 11.
На барабан 11 намотана часть троса 12 (до 2% от начальной длины, с учетом этого участка троса его полная длина составит 1,02). Устройство натяжения троса 13 используется для уменьшения длины троса, если расстояние между КБ и ТСМ после отделения ТСМ, которое может быть измерено бортовыми средствами КБ, становится меньше развернутой длины троса, которое также может быть определена на борту КБ, и для демпфирования продольных колебаний троса после формирования тросовой связи между КБ и ТСМ+КМ в том числе и при наличии .
Демпфирование колебаний осуществляется за счет увеличения длины троса при вращении барабана 11 с одновременным действием тормозящего момента, создаваемого устройством натяжения троса 13. Уравнение деформации троса переменной длины (20) с учетом (24) имеет вид:
Для демпфирования упругих колебаний троса зададим закон изменения длины троса при помощи дифференциального уравнения:
где  - коэффициент демпфирования упругих деформаций троса,
- коэффициент демпфирования упругих деформаций троса,  - коэффициент демпфирования колебаний длины троса . В этом случае уравнение (37) будет описывать упругие затухающие колебания троса. Для определения момента М, создаваемого устройством натяжения троса 13, запишем уравнение вращения барабана 11:
- коэффициент демпфирования колебаний длины троса . В этом случае уравнение (37) будет описывать упругие затухающие колебания троса. Для определения момента М, создаваемого устройством натяжения троса 13, запишем уравнение вращения барабана 11:

где  - момент инерции барабана относительно оси вращения; R - средний радиус намотки троса. В правой части уравнения (39) первое слагаемое представляет собой момент от силы натяжения троса
- момент инерции барабана относительно оси вращения; R - средний радиус намотки троса. В правой части уравнения (39) первое слагаемое представляет собой момент от силы натяжения троса  , второе - момент, создаваемый устройством натяжения троса 13. Угловое ускорение барабана 11 (
, второе - момент, создаваемый устройством натяжения троса 13. Угловое ускорение барабана 11 ( ) может быть выражено через ускорение
) может быть выражено через ускорение  :
:
тогда уравнение (39) примет вид:

Подставив (38) в (41), получим

Положительная величина скорости деформации троса (скорость удлинения) приводит к уменьшению момента и, следовательно, к увеличению длины троса (размотки его с барабана 11), что приводит к уменьшению его упругой деформации.
При ослаблении троса в выражении (41) сила натяжения T становится равной нулю. В этом случае устройство натяжения троса 13 создает минимальный момент  , обеспечивающий уменьшение длины троса до его натяжения и выполнения условия
, обеспечивающий уменьшение длины троса до его натяжения и выполнения условия  , где
, где  - минимальная сила натяжения троса.
- минимальная сила натяжения троса.
На Фиг. 6, 7 и 8 показаны результаты интегрирования дифференциальных уравнений (37) и (38).
На Фиг. 6 показан график изменения удельной упругой деформации троса с начальной длиной  км и диаметром 3 мм, при этом начальная упругая деформация троса равна нулю
км и диаметром 3 мм, при этом начальная упругая деформация троса равна нулю  , а начальная скорость деформации троса
, а начальная скорость деформации троса  м/с, начальная угловая скорость тросовой системы
м/с, начальная угловая скорость тросовой системы  1,9°/с. Радиус барабана 11 принят равным
1,9°/с. Радиус барабана 11 принят равным  мм. Начальная скорость деформации троса вызвана ненулевой проекцией относительной скоростью
мм. Начальная скорость деформации троса вызвана ненулевой проекцией относительной скоростью  между КБ и ТСМ+КМ на направление троса.
между КБ и ТСМ+КМ на направление троса.
На Фиг. 6 показаны закон изменения удельной деформации троса при отсутствии демпфирования продольных колебаний троса ( ) и при
) и при  с-1,
с-1,  с-1.
с-1.
На Фиг. 7 показан закон изменения длины троса при демпфировании колебаний.
На Фиг. 8 показан закон изменения момента (42), создаваемого устройством натяжения троса 13.
Результаты, представленные на Фиг. 6 показывают, что при отсутствии демпфирования колебаний удельная деформация троса превышает предельную деформацию  (табл. 2), что приведет к разрыву троса. При действии демпфирующего момента максимальное значение удельной деформации становится меньше предельного значения и не превышает 1,1 %. Длина троса при демпфировании упругих колебаний увеличивается не более чем на 40 м или не более чем на 1,4% к начальной длине 3 км (Фиг. 7). Максимальный момент, создаваемый устройством натяжения троса в рассматриваемом примере составляет не более 2 кН⋅м (Фиг. 8).
(табл. 2), что приведет к разрыву троса. При действии демпфирующего момента максимальное значение удельной деформации становится меньше предельного значения и не превышает 1,1 %. Длина троса при демпфировании упругих колебаний увеличивается не более чем на 40 м или не более чем на 1,4% к начальной длине 3 км (Фиг. 7). Максимальный момент, создаваемый устройством натяжения троса в рассматриваемом примере составляет не более 2 кН⋅м (Фиг. 8).
Фиг. 6 и 7 иллюстрируют, что момент, создаваемый устройством натяжения, определяемый выражением (42), приводит к затуханию колебаний и . Скорость затухания этих колебаний будет определяться значениями коэффициентов и соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ МАНЕВРА УКЛОНЕНИЯ КОСМИЧЕСКОГО АППАРАТА ОТ СТОЛКНОВЕНИЯ НА ОРБИТЕ С ДРУГИМИ ТЕЛАМИ | 2015 |
|
RU2586920C1 |
| Способ очистки орбит от объектов космического мусора | 2018 |
|
RU2676368C1 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| СПОСОБ СОЕДИНЕНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ В КОСМИЧЕСКОМ ПРОСТРАНСТВЕ | 2015 |
|
RU2583255C1 |
| СПОСОБ ДОСТАВКИ С ОРБИТАЛЬНОЙ СТАНЦИИ НА ЗЕМЛЮ СПУСКАЕМОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПАССИВНОГО РАЗВЕРТЫВАНИЯ КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2497729C2 |
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2521082C2 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| ДОЛГОВРЕМЕНЫЙ ПИЛОТИРУЕМЫЙ ОРБИТАЛЬНЫЙ ТРОСОВЫЙ КОМПЛЕКС | 1993 |
|
RU2088491C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ | 1996 |
|
RU2112714C1 |
Изобретение относится к ракетно-космической технике и может быть использовано для стыковки с некооперируемыми объектами космического мусора. Способ увода объектов крупногабаритного космического мусора основан на использовании космического буксира (КБ), оснащенного двигательной установкой для реализации продольных импульсов по «толкающей» схеме, с отделяющегося от него на тросе транспортно-стыковочного модуля (ТСМ), оснащенного декартовой двигательной установкой, и стыковки с космическим мусором (КМ) с использованием системы захвата типа «штырь-конус», «робот-рука» или сеть за счет различия орбитальных скоростей (КБ+ТСМ) и КМ. Орбита КБ+ТСМ определяется по задаваемым параметрам  ,
,  ,
,  , определяющим расчетное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной , где - угол между местной вертикалью орбиты КМ и тросом, соединяющим КМ и КБ; - скорость КБ относительно КМ, перпендикулярная тросу, диаметр троса
, определяющим расчетное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной , где - угол между местной вертикалью орбиты КМ и тросом, соединяющим КМ и КБ; - скорость КБ относительно КМ, перпендикулярная тросу, диаметр троса  определяют из условия прочности троса, используя параметры относительного движения, соответствующие началу натяжения троса, c учетом погрешности построения орбиты КБ и определения орбиты КМ. Повышается надежность системы при эксплуатации. 1 з.п. ф-лы, 8 ил.
определяют из условия прочности троса, используя параметры относительного движения, соответствующие началу натяжения троса, c учетом погрешности построения орбиты КБ и определения орбиты КМ. Повышается надежность системы при эксплуатации. 1 з.п. ф-лы, 8 ил.
1. Способ увода объектов крупногабаритного космического мусора, основанный на использовании космического буксира (КБ), оснащённого двигательной установкой для реализации продольных импульсов по «толкающей» схеме, с отделяющегося от него на тросе транспортно-стыковочного модуля (ТСМ), оснащённого декартовой двигательной установкой, и стыковки с космическим мусором (КМ) с использованием системы захвата, такой как «штырь-конус», «робот-рука» или сеть, за счёт различия орбитальных скоростей (КБ+ТСМ) и КМ, использовании ТСМ для доставки троса от КБ к КМ, формировании вращающейся тросовой системы (ТС), приложении импульса двигательной установкой КБ для изменения параметров орбиты, управлении натяжением троса, демпфирования возможных продольных колебаний тросов, и, при достижении центром масс ТС заданной области околоземного пространства и заданной орбитальной скорости движения КМ, осуществляют отделение КМ путём разрыва жёсткой механической связи между ТСМ и КМ,
добавляют следующие действия:
1) параметры орбиты КМ и его угловое положение по отношению к орбитальной системе координат на момент захвата КМ и начала натяжения троса,
2) орбиту КБ+ТСМ определяют по задаваемым параметрам  ,
,  ,
,  , определяющим расчётное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной ,
, определяющим расчётное положение и скорость КБ по отношению к КМ в плоскости орбиты КМ в момент начала натяжения троса с начальной длиной ,
где – угол между местной вертикалью орбиты КМ и тросом, соединяющим КМ и КБ;
– скорость КБ относительно КМ, перпендикулярная тросу,
3) угол при формировании орбиты перехвата определяют из условия расположения КБ по отношению к корпусу КМ со стороны области захвата ТСМ в момент начала натяжения троса,
4) диаметр троса  определяют из условия прочности троса, используя параметры относительного движения, соответствующие началу натяжения троса, c учётом погрешности построения орбиты КБ и определения орбиты КМ
определяют из условия прочности троса, используя параметры относительного движения, соответствующие началу натяжения троса, c учётом погрешности построения орбиты КБ и определения орбиты КМ
 ,
,
где  – модуль упругости троса;
– модуль упругости троса;  – максимальное допустимое напряжение в тросе;
– максимальное допустимое напряжение в тросе;  – средняя деформация троса, определяемая выражением:
– средняя деформация троса, определяемая выражением:
где  – начальная скорость изменения удельной деформации троса;
– начальная скорость изменения удельной деформации троса;  – начальная угловая скорость вращения тросовой системы;
– начальная угловая скорость вращения тросовой системы;
 – частота собственных продольных колебаний тросовой системы:
– частота собственных продольных колебаний тросовой системы:
 ,
,
 – приведенная масса КБ и связки ТСМ+ КМ,
– приведенная масса КБ и связки ТСМ+ КМ,
 – площадь поперечного сечения троса,
– площадь поперечного сечения троса,
 – проекция скорости КБ относительно связки КМ+ТСМ в момент начала натяжения троса на направление троса:
– проекция скорости КБ относительно связки КМ+ТСМ в момент начала натяжения троса на направление троса:
 ,
,
где  ,
,  – радиус-векторы КБ и КМ в геоцентрической инерциальной системе координат с учётом ошибок выведения КБ+ТСМ и прогноза орбиты КМ на момент захвата КМ бортовой аппаратурой ТСМ,
– радиус-векторы КБ и КМ в геоцентрической инерциальной системе координат с учётом ошибок выведения КБ+ТСМ и прогноза орбиты КМ на момент захвата КМ бортовой аппаратурой ТСМ,
– проекция скорости КБ относительно связки КМ+ТСМ в момент начала натяжения троса на направление, перпендикулярное тросу:
 ,
,
где  ,
,  – скорости центров масс КБ и связки КМ+ТСМ в момент начала натяжения троса с учётом возмущений, т.е. ошибок выведения и прогноза,
– скорости центров масс КБ и связки КМ+ТСМ в момент начала натяжения троса с учётом возмущений, т.е. ошибок выведения и прогноза,
5) положение КМ на орбите в момент захвата, параметры орбиты перехвата с учётом ошибок реализации орбиты перехвата и определения параметров орбиты КМ выбирают из условия минимизации составляющей скорости на момент натяжения троса между КМ и КБ

где  – угол истинной аномалии КМ, определяющий его положение на орбите в момент захвата,
– угол истинной аномалии КМ, определяющий его положение на орбите в момент захвата,  – векторы ошибок определения орбиты КМ и реализации орбиты перехвата КБ.
– векторы ошибок определения орбиты КМ и реализации орбиты перехвата КБ.
2. Способ по п. 1, в котором КБ оснащён адаптером с устройством отделения ТСМ, контейнером для укладки троса по типу парашютных строп, обеспечивающих свободное развертывание троса после отделения ТСМ, и устройством натяжения и демпфирования для уменьшения длины троса на конечном этапе сближения ТСМ с КМ и для демпфирования продольных колебаний троса после формирования тросовой связи между КБ и связки ТСМ+КМ.
| ПРИБОР ДЛЯ ИСПЫТАНИЯ АБРАЗИВНЫХ КРУГОВ НА ТВЕРДОСТЬ | 1933 |
|
SU38352A1 |
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2430861C1 |
| US 7207525 B2, 24.04.2007 | |||
| US 9463884 B2, 11.10.2016. | |||

